
基于时间控制技术的双NMOS 降压直流转换器
2024-03-04 05:11梁博文辛晓宁
微处理机 2024年1期
梁博文,辛晓宁,任 建,聂 彤
(沈阳工业大学信息科学与工程学院,沈阳 110870)
1 引言
开关电源转换器是大部分电子系统的基本组成部分,特别是便携式和手持式设备[1]。降压转换器,即buck 型DC-DC,在电池供电设备中无处不在,最常用作产生模拟、数字和射频信号的集成电路的电源电压。DC-DC 转换器正朝着体积小、功耗低、效率高的方向发展[2-3]。以减少电流消耗为主要考虑,在此提出一种基于时间控制的双NMOS 直流转换器。此架构使用时间作为处理变量,消除系统对宽带宽误差放大器、PWM 模块、高分辨率ADC 和数字脉冲宽度调制器等的依赖。同时使用CMOS 级的类数字信号来工作。因此这一架构是结合了数字控制和模拟控制双方的优点来实现其功能的。
2 拓补结构
DC-DC 转换器的作用是将一个电压等级的直流电压转换为另一个电压等级的直流电压。根据拓扑结构中电感的不同连接方式,可以分别实现升压、降压和升降压三种功能。如图1 所示,即为buck 型DC-DC 转换器的拓扑结构[4]。

图1 Buck 型DC-DC 转换器拓扑结构
当M1 导通、M2 截止时,电感左侧电压升高,电源电压VIN给电感电容充电,负载电阻上流过负载电流,此时DC-DC 转换器处于充电阶段;当M2 导通、M1 截止时,电感左侧电压低于右侧电压,但由于电感存在感应电动势,电流不能发生突变,电感继续为负载供电,电流逐渐变小,当电感电流小于负载电流时,电容将会开始放电来维持负载电流,此时处于续流阶段。根据伏秒平衡,电感在稳定工作时,一个周期内电流的变化量是相等的,如下式:
其中,T 为工作周期,D 为充电时间占整个周期的比例。在整个工作周期内,充电电流是间断的,也就是占空比永远小于1,从而实现降压转换。
3 传统基于时间控制模式
传统基于时间控制的降压转换器基本架构如图2 所示,它由电压-时间转换器、时间控制补偿模块和DC-DC 拓扑结构组成。电压-时间转换器将误差电压转换为时间信号,并传送至时间补偿控制模块。补偿电路对时间信号进行处理,实现PID 补偿方式,输出PWM 调制信号,对功率管实现控制[5]。
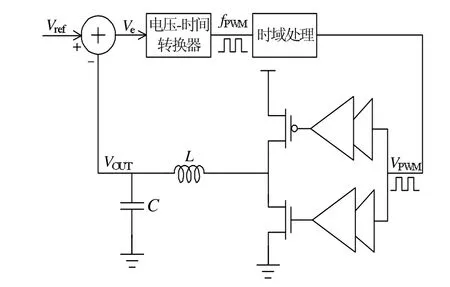
图2 传统基于时间控制的降压转换器
在时域控制技术中,使用压控振荡器(VCO)来实现电压至时域的转换和积分的功能[6]。传统的时域控制技术架构如图3 所示。图中,振荡器将误差电压Ve转换为频率ωe,此时振荡器的振荡频率可表示为:
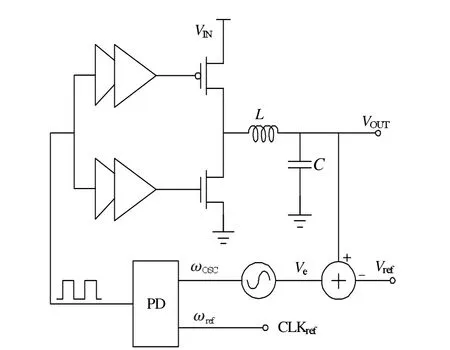
图3 时域控制技术架构图
其中ωfr是振荡器的自由运行频率,KVCO是压控振荡器的增益。在电路稳定时,有:
由于压控振荡器充当电压输入,相位输出的积分器不能直接驱动功率级。因此通过相位检测器(PD)将参考时钟相位和压控振荡器输出相位进行比较,生成控制功率管所需要的PWM 调制信号,进而对功率管实现控制。
4 电路改进及分析
4.1 控制架构
对传统电路加以改进,加入控制架构,如图4 所示。通过三个差分跨导器GmI、GmP和GmD将电压信号转化为电流信号,分别用于实现积分、比例和微分控制。积分环节的输出电流控制两个流控振荡器RCCO 和FCCO。流控振荡器是由多个反相器级联组成,在环形振荡器的基础上增加了调节频率变化的功能。当输入差分电压等于零,即VREF=VFB时,振荡器的自由运行频率等于期望的开关频率。比例和微分环节是通过GmP和GmI的输出电流共同控制流控延迟线,将相位信号求和。此设计不仅有助于降低功耗,也能降低回路延迟,提高相位稳定裕度。

图4 改进电路原理图
积分环节的具体电路如图5 所示。采用差分跨导的方式实现参考电压和反馈电压之间的比较。

图5 差分跨导流控振荡器
其中R1、R2、R3和R4与差分管构成带有负反馈的共源极,这样不仅有助于提高输出电流的线性度,也能降低增益,增强电路的稳定性。此时,流控振荡器的增益为:
其中,GM是差分跨导器的增益。差分跨导将输入电压转换为电流,来影响环形振荡器每一级增益的延迟,实现对频率的控制。因为相位是频率的积分,所以CCO 作为电压到相位的积分器,如下式:
电流控制的延迟线用于比例和微分控制。流控延迟线由反相器延迟单元级联构成,如图6 所示。用GmP实现比例控制。微分控制则是由RC 高通电路实现。通过跨导GmP和跨导GmI改变跨导电流,从而改变CCDL 的延迟。将积分、比例和微分这三个环节进行组合,即可实现基于时间的PID 控制。

图6 比例、微分环节的流控延迟线
4.2 驱动电路
设计选用双NMOS 功率管实现驱动功能,电路原理图如图7 所示。与PMOS 相比,使用NMOS 作为开关管,将在同等面积条件下获得更小的导通电阻和寄生参数[7]。此设计对效率和瞬态响应速度都有一定程度的提高。在驱动电路的设计过程中,增加“自举电容”[8],通过功率管的交替导通,将高侧开关管的栅极电压“举”至2 倍VIN,使其发挥出更好的“开关”作用。

图7 驱动电路原理图
驱动电路的主体是一个不交叠时钟电路,用于产生一个合适大小的死区时间。同时增加电平迁移电路,实现内部电压到自举电压之间的转换。
5 整体仿真
基于CSMC18BCD 工艺,在Cadence 中搭建并应用Spectre 完成对改进电路的仿真。电感大小选取为240nH,电容为22μF。在典型工艺角,温度27℃,重载条件下(VIN=3.3 V,IRL=3 A),PWM 开关频率f=4MHz,系统启动过程仿真结果如图8 所示。如图9所示则为系统在满载时的输出纹波仿真结果。从图中可以看出,输出电压VOUT为0.9 V,输出电压纹波为3.76mV。
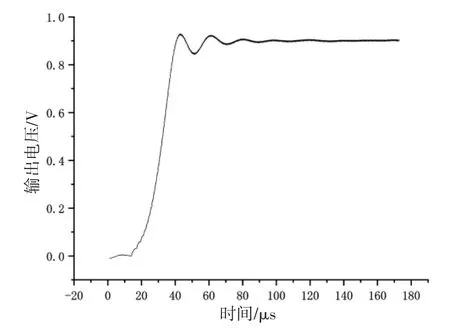
图8 系统启动过程仿真结果
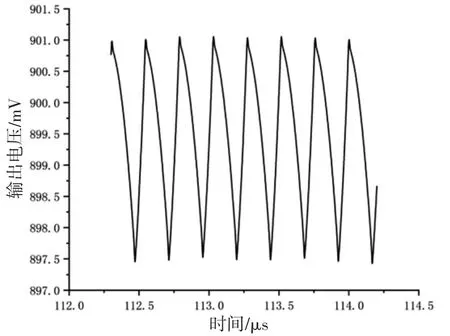
图9 输出电压纹波
经仿真可知,整体控制架构的功耗较小,仅使用7.6μA 的静态电流即实现了电路控制。进而得知,当输出电压为0.9V、负载电流为1.5A 时,达到峰值效率85.71%。在负载范围0~3A 内,整体效率均高于75%。与其他同类研究的性能进行对比,比较结果如表1 所示。
6 结束语
设计基于CSMC18BCD 工艺,使用基于时间控制架构,将时间作为处理变量,有效降低了系统功耗。采用双NMOS 功率管,设计实现了带有“自举功能”的不交叠驱动电路。与此同时,寄生参数和导通电阻明显减小,提高了瞬态响应速度。对系统进行整体仿真,所得参数也较为理想。本设计以较低的静态电流,有效降低了系统整体功耗,在实际使用中,将对节省能源起到重要作用。
猜你喜欢
液压与气动(2022年1期)2022-12-07
现代信息科技(2022年1期)2022-06-20
现代信息科技(2022年2期)2022-06-15
新世纪智能(数学备考)(2021年5期)2021-07-28
液压与气动(2021年1期)2021-04-08
科学与财富(2020年35期)2020-03-11
分析测试学报(2015年3期)2016-01-13
信息安全研究(2015年3期)2015-02-28
军事交通学院学报(2014年11期)2014-12-25
新媒体研究(2014年11期)2014-09-01
