
Communication-Aware Mobile Relaying via an AUV for Minimal Wait Time: A Broad Learning-Based Solution
2024-03-04 07:44WenqiangCaoJingYanXianYangCailianChenandXinpingGuan
Wenqiang Cao , Jing Yan ,,, Xian Yang ,Cailian Chen , and Xinping Guan ,,
Dear Editor,
This letter studies the communication-aware mobile relaying via an autonomous underwater vehicle (AUV) for minimal wait time.Compared with the analysis-based channel prediction solution, the proposed discrete Kirchhoff approximation solution has a higher estimation accuracy.Different with the deep learning (DL), a semi-supervised broad learning system (BLS) based relaying controller can reduce training time.Major contributions of this letter lie in two aspects: 1) Construct a BLS-based channel estimator with obstacle scattering effect, where the accurate estimated channel can be obtained with low computational cost; 2) Design a semi-supervised BLS based relay controller, such that average wait time can be minimized.
Related works: Recently, the mobile relaying of an AUV has been widely used in marine applications [1], [2].Since the distribution of underwater channels is uneven, some scholars are committed to use the spatial distribution of channel quality to guide an AUV to relay data in different positions, e.g., [3], [4].However, the above algorithms ignore the impact of obstacles on channel distribution.In [5],[6], the Kirchhoff approximation-based numerical methods were developed to capture the impact of obstacles on the channel, however they are not suitable for the large objects due to the huge computational workload.To handle this issue, an analytical method was proposed in [7] to study the scattering of texture details, but it is not suitable for studying the scattering effect of distant obstacles.
Apart that, another task is to design an appropriate controller for AUV to reach the relay position.We have noticed that the supervised or unsupervised BLS based controllers, such as [8], [9], can reduce an amount of training time and achieve better training results compared to the mainstream deep learning based controllers [10].However, the above controllers depend on labels or precise model parameters.Considering the scattering effect of obstacles, how to design a semi-supervised BLS based relay controller to achieve the relaying task is an open issue.
Problem statement: The underwater relay system comprisesninfinite capacity queues, where each queue is a source and destination sensor pair.Data arrived stochastically the source node must be transferred to the corresponding destination node, which is too far away for direct communication.To improve the transmission success rates of queues, the relay operation is performed by an AUV.
The characteristics of the multi-queue system are summarized as the following two aspects: 1) Data accumulation: Data accumulates at pi,saccording to a Poisson process with average rate λibits per second (bps) in queuei.2) Relaying service: When serviced by an AUV, queueitransfers data from source node at a rate ofB×ξ bits per second (bps), whereBHz denotes the fixed bandwidth of queue andξbps/Hz denotes the data upload/offload speed of the AUV.
Specifically, the position and velocity vectors of AUV is defined as
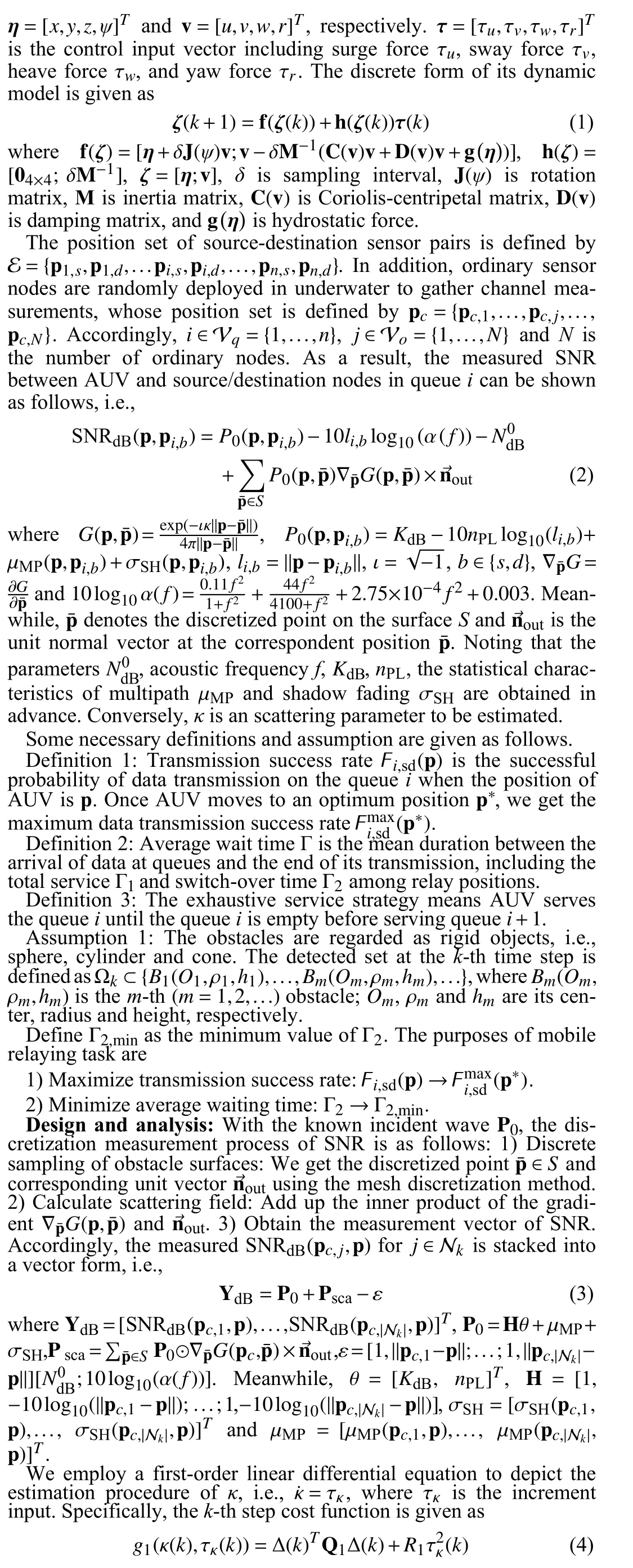
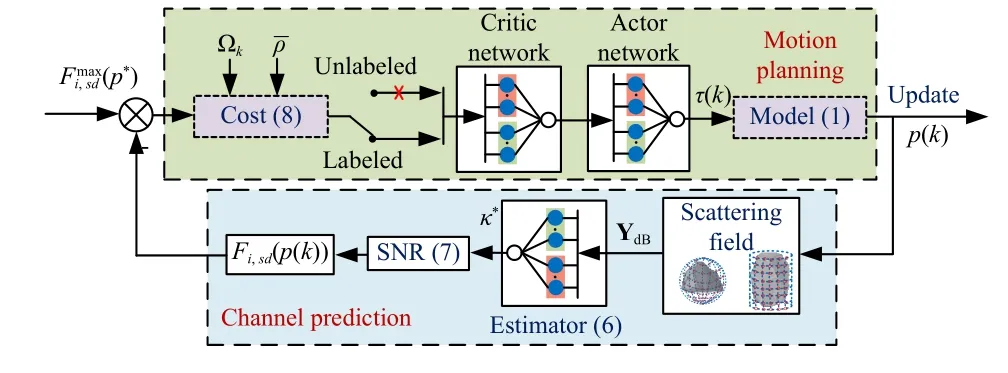
Fig.1.Relationship between channel prediction and mobile relaying.
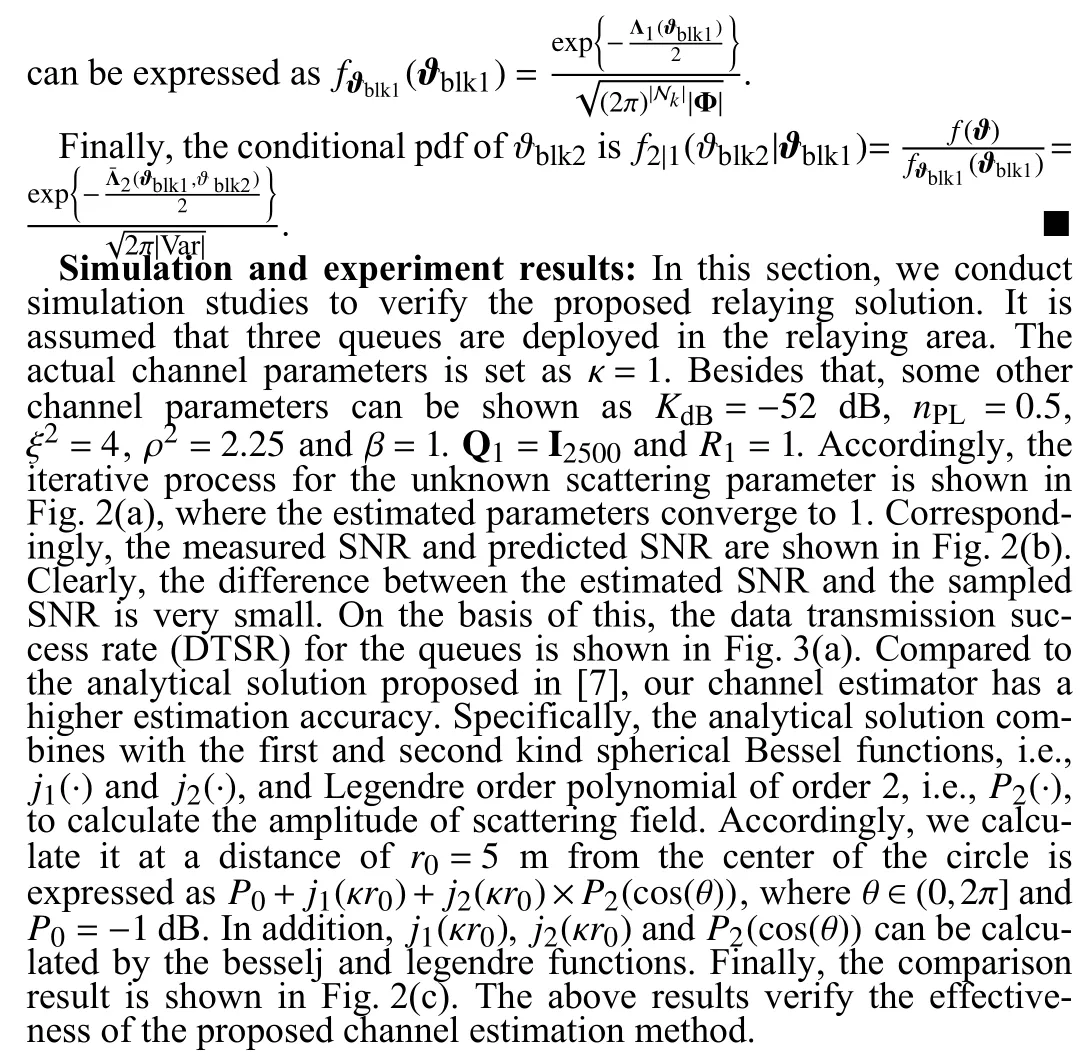
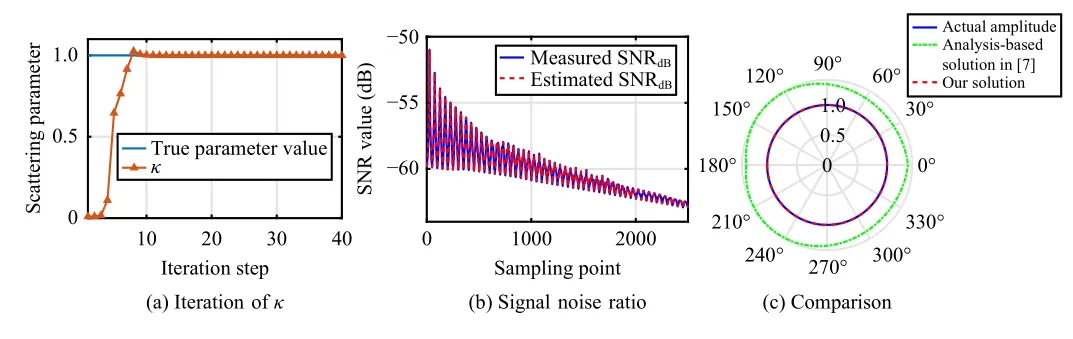
Fig.2.Simulation results for the BLS-based online channel prediction.
With the predicted channel information, we verify the effectiveness of the semi-supervised relay controller.The initial state of AUV is ζ(0)=[45,20,-33,5,0,0,0,0]T.Accordingly, the trajectory of AUV is presented in Fig.3(a), whose position and orientation are shown in Fig.3(b).Correspondingly, the optimal policy of AUV is shown in Fig.3(c).Based on this, the DTSR of AUV is shown in Fig.3(d).Clearly, F1,sd(p(k)) , F2,sd(p(k)) and F3,sd(p(k)) converge to 0.25, which means AUV has been derived to the optimal relay positions for the three queues.The collision avoidance distances are shown in Fig.3(e), where the collision avoidances are both greater than 6 m, 5 m and 3 m.Finally, the time taken for this control process is shown in Fig.3(f), which approaches Γ2,min.These results verify the effectiveness of the proposed controller.
The field experiment is conducted in the pool of our lab.Due to condition limitation, we only verify the channel estimator.As shown by Fig.4(a), the obstacle is captured by an cylinder according to Assumption 1.As mentioned above, we employ a digital hydrophone to obtain channel measurement data.Correspondingly, the iterative process of scattering parameter is shown in Fig.4(c).In addition, the measured and estimated channel distribution is shown in Fig.4(b).Clearly, the scattering parameter can be converged to 2.68.The estimated results are very close to the measured results, which proves the effectiveness of our proposed channel estimator.

Fig.4.Experimental results for the channel prediction.
Conclusion and future works: This letter studies the broad learning based mobile relaying solution of AUV for minimal wait time.It should be emphasized that our solution assumes that the obstacles are regarded as rigid objects, which is a prerequisite for using the Kirchhoff approximation method.However, it is valid only in a few special cases, where a underwater scatterer is rigid and immovable.Therefore, this is a limitation of our method.To solve this limitation,we will combine the controller with multiple sensing techniques(e.g., the sonar and binocular vision), such that the sensing information can be effectively fed back to the control systems.In future, we will implement the solution to the practical marine environment.
Acknowledgments: This work was supported in part by the Natural Science Foundation of China (62222314, 61973263, 62033011),the Youth Talent Program of Hebei (BJ2020031), the Distinguished Young Foundation of Hebei Province (F2022203001), and the Central Guidance Local Foundation of Hebei Province (226Z3201G).
 IEEE/CAA Journal of Automatica Sinica2024年3期
IEEE/CAA Journal of Automatica Sinica2024年3期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- A Dual Closed-Loop Digital Twin Construction Method for Optimizing the Copper Disc Casting Process
- Adaptive Optimal Output Regulation of Interconnected Singularly Perturbed Systems With Application to Power Systems
- Sequential Inverse Optimal Control of Discrete-Time Systems
- More Than Lightening: A Self-Supervised Low-Light Image Enhancement Method Capable for Multiple Degradations
- Set-Membership Filtering Approach to Dynamic Event-Triggered Fault Estimation for a Class of Nonlinear Time-Varying Complex Networks
- Dynamic Event-Triggered Consensus Control for Input Constrained Multi-Agent Systems With a Designable Minimum Inter-Event Time