基于改进遗传算法的水电站智能巡检路径规划方法
2024-03-01 08:31秦豪杰
四川水利 2024年1期
秦豪杰,费 洋
(国能大渡河大岗山发电有限公司,四川 雅安 625400)
0 引言
水电站运行的安全性与可靠性对社会经济发展具有重要影响。在当前信息化、智能化技术高速发展的趋势下,水电站巡检及安全维护方法也越来越智能化,能够有效地防止重大事故的发生[1]。在水电站智能巡检中,需要根据水电站的内部结构、全局规划及局部规划,合理分配巡检路径,避免出现巡检路径重复,增加人力资源消耗与财力消耗、降低巡检效率的问题[2]。此时,科学合理的巡检路径规划方法至关重要。在众多学者的不断努力下,水电站巡检路径规划方法逐渐成熟完善,可以预先规划分配好巡检路线,保证巡检质量。但是,随着水电站建设规模越来越庞大、数量越来越多,传统的巡检路径规划方法在应用过程中逐渐暴露出了一些缺陷,例如,路径规划灵活性与时效性较差、在碰到突发情况下不能快速作出有效处理、路径规划精度较低[3]。
为了改善上述问题,本文引入了改进遗传算法,该算法是通过模拟自然界种群选择衍生出的智能随机搜索算法,经过种群选择与进化,在达到智能巡检路径规划所需的精度后终止,能够为巡检路径规划提供有力的帮助。基于此,本文在传统水电站巡检路径规划方法的基础上,引入改进遗传算法,开展了基于改进遗传算法的水电站智能巡检路径规划方法的全面研究。
1 水电站智能巡检路径规划方法设计
1.1 构建水电站栅格模型
本文设计的水电站智能巡检路径规划方法中,先要对智能巡检的水电站环境地图进行描述,将当前的环境地图信息输入到计算机中,通过计算机的智能分析,为后续的路径规划提供良好的数据支持。因此,开展水电站栅格模型构建研究,通过构建模型,提取水电站环境地图中的特征,并不断探测新的环境信息。构建水电站栅格模型所需内容(见图1)。

图1 构建水电站栅格模型所需内容组成
如图1所示,首先,采集水电站环境地图相关信息数据;其次,在水电站现场布设多组传感器与摄像机,实时采集水电站运行状态变化数据。在此基础上,对水电站运行状态变化数据中的不确定数据进行技术处理,将处理后的数据添加到栅格模型内,实现格栅模型信息数据实时更新的目标[3]。设定智能巡检工作空间长度为M,宽度为N,栅格均为边长为L的正方形,此时,栅格数量计算表达式为:
R=(M/L)·(N/L)
(1)
式中,R表示水电站栅格模型中小栅格的数量。工作空间栅格mapi可以表示为:
Map={mapi,mapi=0/1}
(2)
利用二进制表示水电站智能巡检工作空间内是否有障碍物,mapi=0表示智能巡检工作自由区域;mapi=1表示智能巡检障碍物区域,不能直接进行智能巡检。构建的栅格模型能够将水电站智能巡检的工作空间划分为多个栅格,根据智能巡检工作空间的大小,确定栅格的数量,通过每个栅格特定的特征信息,全方位、多维度地描述水电站智能巡检工作空间是否存在障碍物及水电站的运行状态变化[4]。
1.2 基于改进遗传算法规划全局巡检路径
完成上述水电站栅格模型构建后,可知水电站智能巡检工作空间是否存在障碍物及水电站的运行状态变化。在此基础上,利用改进遗传算法,规划水电站全局巡检路径。
本文设计的基于改进遗传算法的巡检路径全局规划流程如图2所示。

图2 基于改进遗传算法的巡检路径全局规划流程
如图2所示,通过构建的水电站栅格模型,确定智能巡检路径规划任务的目标函数与变量,对其进行编码处理。从编码中随机选取任意部分作为改进遗传算法的初始化种群,确定初始化种群起点到目标节点的可行路径,生成可行路径编码集合。对种群个体的适应度进行评估[5]。适应度指的是个体在种群中生存的优势程度,其评估表达式为:
(3)
式中,F表示适应度函数;s表示初始化种群个体通过栅格的总数;D表示相邻栅格之间的直线距离和。
通过计算,得出初始化种群个体的适应度,适应度值越大,被选中的可能性越高,反之同理。对适应度进行检验,判断其是否满足水电站智能巡检路径全局规划最优收敛条件,若不满足最优收敛条件,则通过选择、交叉、变异操作生成新的种群,而后再次评估种群个体适应度,重复上述步骤[6]。若满足最优收敛条件,则对种群个体进行解码处理,输出解码后的最优解,即为水电站智能巡检最佳路径,实现巡检路径规划的目标。
2 试验分析
2.1 试验准备
上述内容便是本文利用改进遗传算法,提出的水电站智能巡检路径规划方法的全部设计流程。在提出规划方法投入水电站工程实际使用前,需要对方法的可行性及规划效果作出试验测试,确认智能巡检路径规划无误后,方可投入实际使用。因此,开展如下的试验。
利用Simulink进行仿真试验,选取R水电站作为此次试验的研究目标。通过拍摄真实的R水电站场景,获取水电站全局规划与局部规划的巡检路径数据样本[7]。对水电站巡检路径数据集样本进行增广处理,如表1所示。

表1 水电站巡检路径数据集样本
表1为此次试验使用的数据集样本。设计此次试验的改进遗传算法参数,如表2所示。
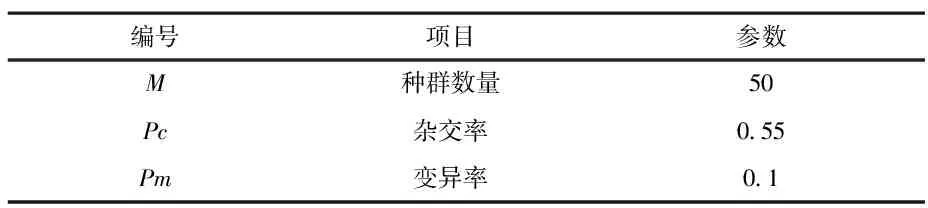
表2 改进遗传算法参数
按照表2,设定水电站智能巡检路径规划试验所需的改进遗传算法参数,依据提出的规划方法流程,规划R水电站智能巡检路径,检验规划结果的可行性。
2.2 结果分析
将上述提出的基于改进遗传算法的水电站智能巡检路径规划方法设置为试验组,将文献[2]提出的基于多能物联的巡检路径规划方法、文献[5]提出的巡检路径规划方法分别设置为对照组1与对照组2,对三种方法的巡检路径规划结果作出全方位的客观对比分析。利用Simulink与MATLAB模拟分析软件,在迭代次数逐渐增大的情况下,模拟三种方法的巡检路径规划过程,设定多目标水电站任务路径规划试验,测定三种规划方法的多目标任务路径规划收敛曲线,对比结果如图3所示。

图3 三种方法多目标任务路径规划收敛曲线对比
从图3的路径规划收敛曲线对比结果可知,三种方法应用后,表现出了不同的性能效果,且具有较大的差异。其中,本文提出的基于改进遗传算法的水电站智能巡检路径规划方法应用后,可以看出其在处理多目标任务智能巡检路径规划的问题中,随着迭代次数的增加,收敛速度明显较对照组1与对照组2更快,且在收敛完毕后,路径长度数值始终保持稳定,巡检路径规划最优解波动较小。由此可见,本文提出的水电站智能巡检路径规划方法具有较高的可行性,可以大规模投入使用。
3 结语
综上所述,为了提高水电站智能巡检工作的效率与质量,本文在传统巡检路径规划方法的基础上,引入改进遗传算法,提出了基于改进遗传算法的水电站智能巡检路径规划方法。通过本文的研究,有效地解决了水电站巡检路径规划任务中的难点,提高了路径规划的时效性与准确性,能够综合水电站全局规划与局部规划,对智能巡检路径作出科学合理的分配,对水电站的安全稳定运行及长远发展具有重要研究意义。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
西北水电(2022年1期)2022-04-16
科技创新与应用(2021年31期)2021-11-09
金桥(2021年8期)2021-08-23
水利技术监督(2016年6期)2017-01-15
中国塑料(2016年11期)2016-04-16
弹箭与制导学报(2015年1期)2015-03-11
水电站机电技术(2014年5期)2014-09-26
雷达学报(2014年4期)2014-04-23
教育与职业(2014年16期)2014-01-19