基于实船冰区加速度监测的破冰颠震识别与分析
2024-03-01 06:05:24丁仕风
船舶 2024年1期
马 群 李 放 崔 濛 高 处 周 利 丁仕风
(1. 江苏科技大学 船舶与海洋工程学院 镇江 212003; 2. 上海交通大学 船舶海洋与建筑工程学院 上海 200240;3. 中国船舶及海洋工程设计研究院 上海 200011)
0 引 言
随着对极地的不断探索,极地航线日益繁忙,极地地区蕴藏的丰富战略资源也被不断发掘。极地考察船作为探索极地的重要装备,已经成为各国研发的热门船型。极地考察船在航行过程中会不断与海冰发生接触(包括碰撞、挤压、摩擦等)。在冰载荷作用下,船体发生运动和振动响应,对船舶结构安全和船载设备运行性能均产生重要影响。有别于局部范围内的结构振动,本文将船体在冰区航行时发生的全局性垂向运动和振动响应统称为破冰颠震。此类响应对于船载设备的正常工作具有较大影响,可能导致紧固件松动、运动部件阻塞、光学设备偏移及其他各类问题。颠震关键参数的确定在极地考察船的设计和运营中具有重要意义。
加速度测量在研究船舶运动和振动方面起着重要作用。通过测量船舶在不同方向上的加速度,可以了解船体在破冰过程中的动态响应,从而优化设计、改进船舶性能。目前对于船舶加速度测量结果主要通过傅里叶变换、短时傅里叶变换(short-time Fourier transform, STFT)、小波变换和Wigner-Ville分布等方法进行分析,而目前对于船舶加速度的分析研究则主要针对船舶在波浪中的加速度数据。KIM 等[1]利用Morlet 小波在不同尺度上的相互关联,从时域船体响应测量中提取颤振响应,用于区分柔性船舶自由衰减的振动属性。OMER 等[2]在船体中放置加速度传感器,利用STFT 生成时频图,将波浪砰击以线性特征展现。JESSLYN 等[3]利用小波变换简化时频图,通过检测阈值的方法识别波浪砰击次数。DESSI 等[4]利用机器学习模型识别和提取传感器数据中撞击的时长。WANG 等[5]利用STFT 和小波对非平稳脉冲特征和变速工况下的振动与噪声进行分析,识别非稳定脉冲信号中的异常点。破冰过程中的颠震与船舶在波浪砰击的响应具有相似的特征,均会引起全局性的运动和振动响应。BELOV等[6]利用小波变换对时序的冰载荷进行拆分,提出了加速度信号在不同频段对应的激励源划分。YUE等[7]利用STFT 在时域和频域中分析了导致结构产生振动的冰力。HEYN 等[8]利用Wigner-Ville 分布法分析了Frej 号破冰船北极水域航行期间收集的加速度数据,证明了振动的激励频率与主要破冰机制、船舶与冰碰撞的速度,以及相互作用位置有关,而且船的固有频率也会因其周围海冰状况的变化而略有改变。该项研究证明了船上的分布式加速度计可以为监测系统提供有关冰封水域作业中的破冰机制、周围冰情及船体与冰相互作用位置的额外信息,从而为冰区水域作业提供了一个有效的监控工具。
然而,以上研究均是针对特定船-冰接触事件所开展的加速度频域分析,未针对颠震进行研究和量化,在给定加速度测量信号的情况下,仍缺少能够自动、快速识别颠震事件的有效方法,对于不同冰况和航行状况下的颠震量化研究也相对缺乏。
本文对“雪龙2”号多个测点的加速度数据进行分析和判断,利用随船海冰图像和GPS 信号,筛选具有典型性的数据进行后续分析和识别;利用STFT等方法,得出加速度信号的时频图。在此基础上,提出一种改进的单点目标检测(single shot multibox detector, SSD)模型对破冰颠震自动识别,进而分析破冰颠震事件,提取不同冰况条件下的颠震关键特征,探究不同冰况和航速下对颠震关键参数的影响。
1 分布式加速度测量
1.1 原型测量数据
本文所用数据来自“雪龙2”号极地考察破冰船于2019-2023 年南北极航行期间在冰区航行时随船测量的加速度。“雪龙2”号极地考察船目前共安装了8 个加速度测量点,分布在船舶的各个位置,具体布置如表1 所示。

表1 加速度测点位置
加速度传感器分布情况见图1。“雪龙2”号船体监测系统原有加速度测点为5 ~ 8,采样频率为150 Hz,布置位置见图1(a);2022 年后,“雪龙2”号又新加装测点1 ~ 4,采样频率为200 Hz,布置位置见图1(b)。本文所分析的数据均来自于原有测点。

图1 加速度传感器分布情况
此外,船上配备多台摄像机进行海冰冰况观测,并通过GPS 对船舶航速和航迹进行记录,所收集的数据信息主要包括时间、三自由度加速度、对地航向、对地航速、经度、纬度和随船海冰图像等。
图2 为某时段内船首和船舯各测点位置处的加速度信号对比。总体来看,船首部位所受环境载荷(尤其是冰载荷)影响较大,易于识别;相对而言,船舯部位的数据加速度幅值则较小。测点6、7 处的加速度幅值较相似,而测点8 处虽然在沿船长位置上与测点6、7 相似,但加速度量级与测点5 相似,由此可推断测点8 处船体局部振动响应较大。因此在本文后续分析中,选择测点5、7 进行研究。
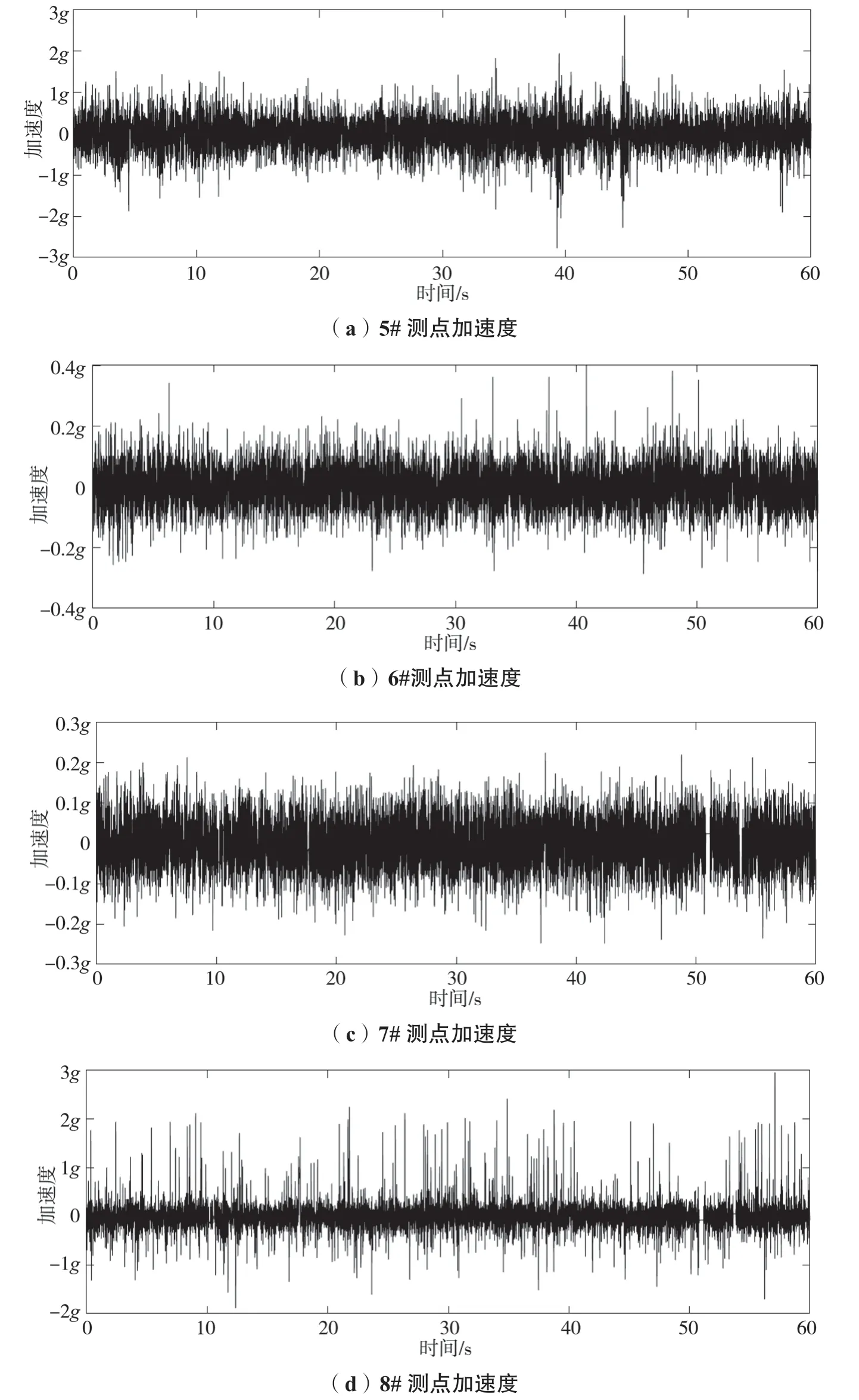
图2 “雪龙2”号垂向加速度
1.2 数据筛选
为了较全面地覆盖海冰冰况和航行状况,需要从大量实测数据中筛选典型案例。本文利用随船海冰图像进行冰厚和海冰密集度识别,并借助GPS信号确定船舶的航速。为保证所选案例具备典型性,需选择冰况和船速相对稳定的时段,以5 ~ 15 min为1 组典型案例。根据冰况和航速,筛选出16 组典型案例,参见表2。
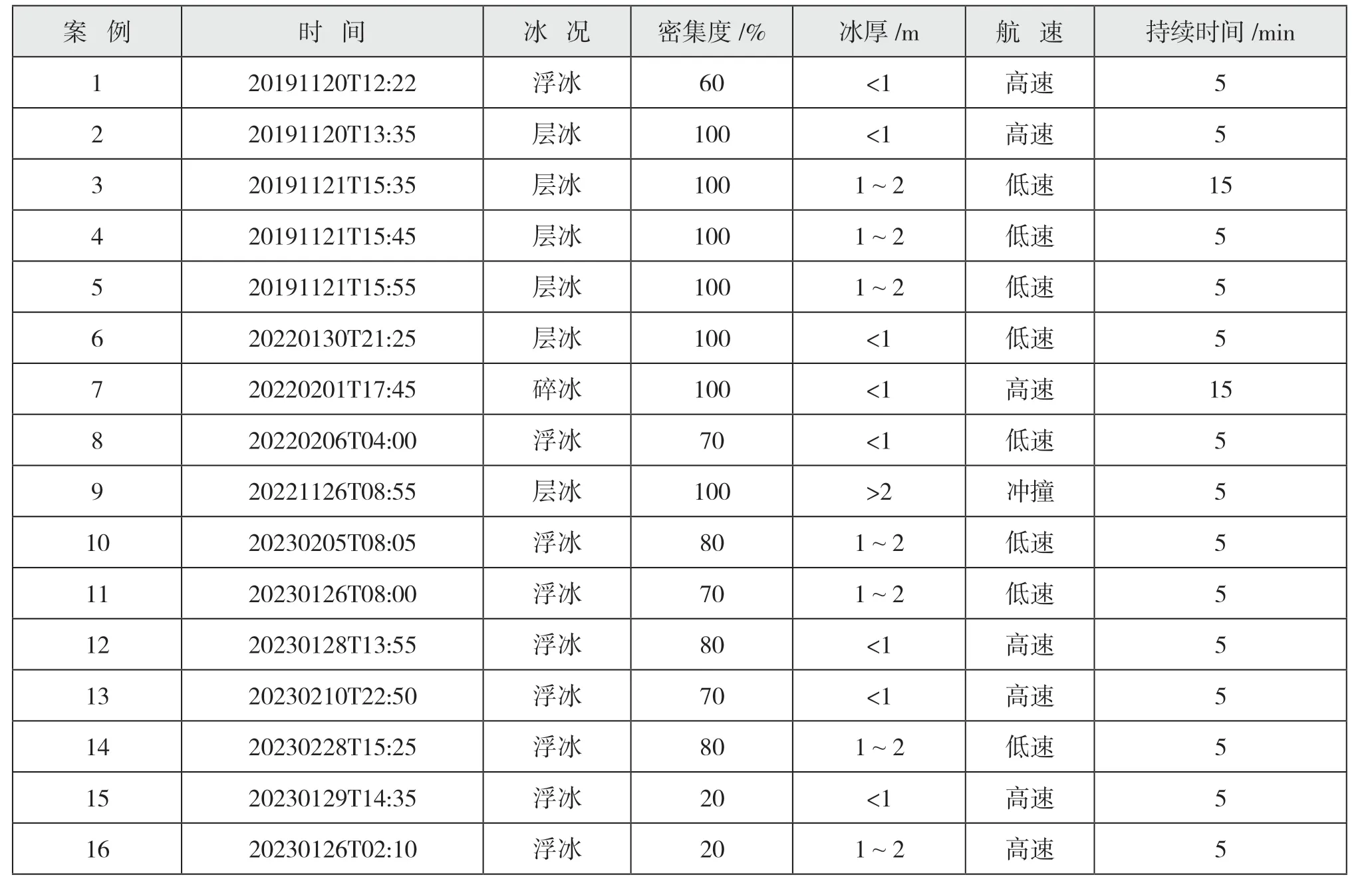
表2 典型案例
冰况主要分为浮冰和层冰(参见图3),分析过程中,还加入1 组碎冰航道进行对比,船速以5 kn 为界限划分为低速和高速,后续破冰颠震分析将以基于这些数据来开展。作为对比,在分析中加入了1 个冲撞破冰案例。这种情况下的航速在短时间内变化较大,因此在表2 中并不对航速进行定义。
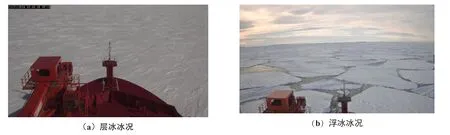
图3 层冰和浮冰冰况下的实拍照片
2 破冰颠震识别与分析方法
2.1 加速度测量信号预处理
利用小波滤波的方法,可以在去除噪声的同时,较完整地保留数据特征,从而为后续的数据分析提供基础。小波滤波的原理是将原始信号分解成不同频率的子信号,通过选取1 个合适的阀值,将大于阀值的小波系数视作有信号产生且应予以保留,而后将滤波后的子信号合并,并最终得到滤波后的信号。信号经小波分解后,可使小波系数变得较大。因噪声的小波系数较小,故本文选用小波阈值,去除低于阈值的小波并进行滤波,得到如图4 所示结构[10]。

图4 小波滤波结构图
本文使用Daubechies 4 小波基函数,实现信号去噪,小波滤波后的效果如图5 所示。

图5 小波滤波效果
2.2 加速度时频分析
为分析极地船舶破冰颠震特性,本项研究采用STFT 方法,对不同测点处所测得的垂向加速度信号进行深入分析,提取出破冰颠震的特征。
STFT 是一种将信号分解成时间和频率2 个维度的方法,它将信号分成若干个时间段,对每个时间段进行傅里叶变换,得到该时间段内信号的频率分布情况。这样可以得到信号在时间和频率上的变化情况,从而分析信号的时频特性。
当下,现实主义创作并没有完结,现实主义创作道路还有很长的路要走。几十年来,现实主义创作经历了风雨洗礼和各种思想运动的考验,已经成为代表中华民族国情的文艺创作主流形式,取得了丰硕的艺术成果——经验和成就同步前进,坚守和开拓并存发展。
本文将STFT 的窗口长度设为0.5 s,为更加清楚地展示每个时间段之间幅值的区别,先将窗口的重叠长度设为0.2 s,所得到的时频图如下页图6所示。其中能量密度越高则颜色更深。

图6 STFT 变换后的时频图
从图6 中可以看出,破冰情况下加速度时频图上呈现线状特征,即在激励下产生宽频的振动响应,进而产生周期性的能量集中,如30 s 左右在频域上的分布和变化。本研究将基于这一观察,通过图像处理使线状特征更加突显,从而基于图像识别实现破冰颠震的自动识别。
将时频图的y轴缩放到0 ~ 10 Hz,并固定颜色轴范围,优化后的图像见下页图7。经过优化后,破冰颠震在时频图上的线状分布特征更加明显,便于自动识别。
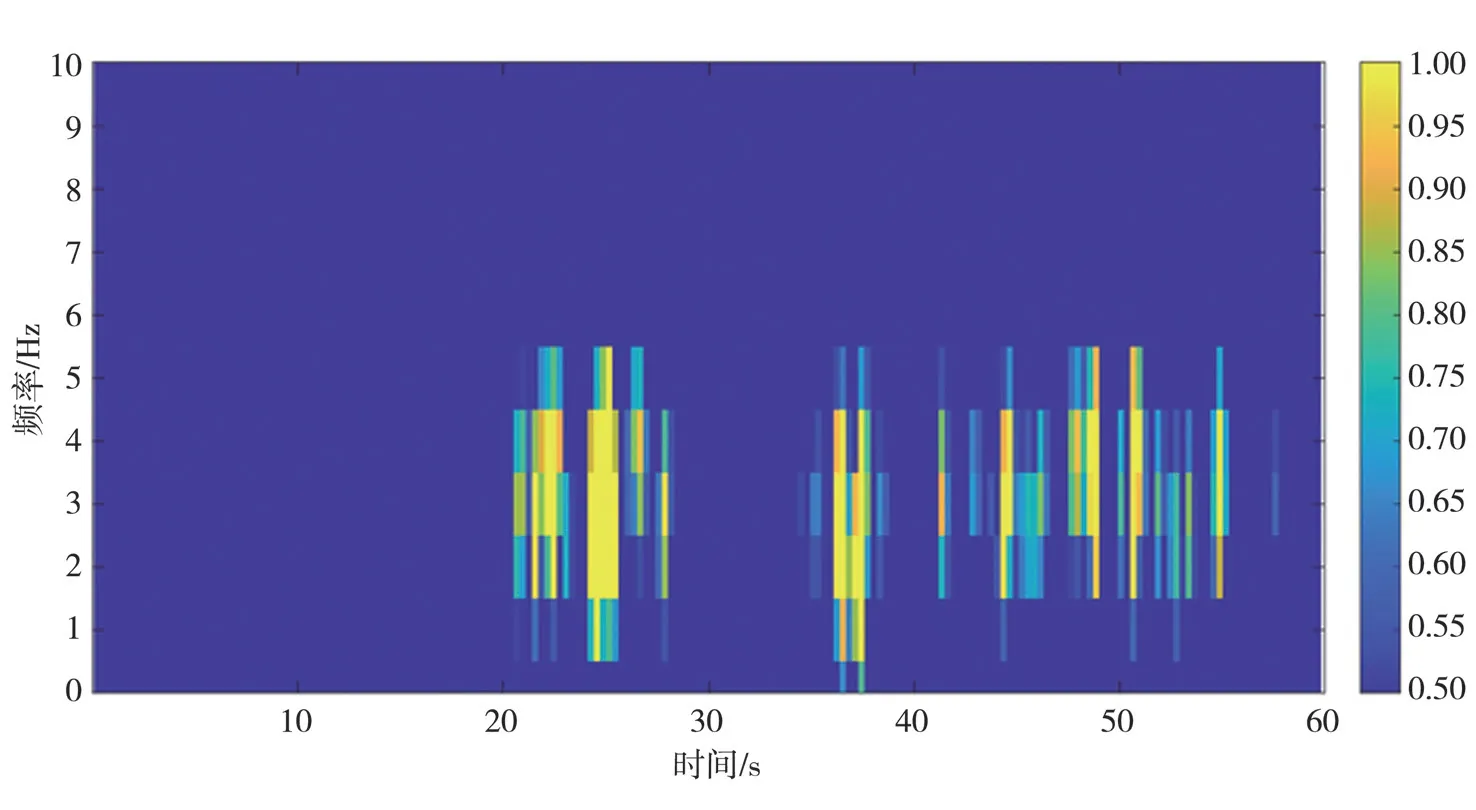
图7 优化后的时频图
2.3 颠震自动识别
通过短时傅里叶变换将原本的一维加速度信号转化为二维图像,本文利用图像识别算法对垂向加速度信号中的颠震进行自动识别。SSD 是目前主流的图像识别网络,其原理是均匀地在图片不同位置进行密集抽样,利用卷积神经网络提取特征,并进行分类回归。其识别速度快,可以满足实时颠震识别的需求[11],但数据集需求较多,模型准确率稍低。虽然SSD 算法在传统数据集上表现优异,但因其设计主要致力于小目标检测,且相对较低的层数可能导致特征提取不足[12]。
基于深度卷积和点卷积框架的MobileNetV2 网络可解决SSD 模型在特征提取上的不足,从而显著降低计算复杂度、减小模型规模,同时提高准确度。其设计理念是先进行升维操作,然后进行降维操作,该过程如下页图8 所示。

图8 MobileNetV2 结构
此外,MobileNetV2 针对其倒残差(inverted residuals)结构中的最后1 个卷积层,采用线性激活函数代替ReLU 激活函数,能有效防止非线性操作对信息的过度破坏[13]。本研究选择了改进的SSD算法,用于识别极地船舶加速度数据的时频图,以提高识别的精度。极地船舶的破冰颠震事件在时间序列上不会出现重叠现象,因此需要消除识别过程中出现的重叠检测,本文在模型中添加非极大值抑制(non maximum suppression, NMS)算法。NMS 算法对所有图片进行循环,选中得分大于门限函数的框,以减少框的数量[14]。其对最后一个维度里的内容进行修改,从而对重叠的颠震识别进行消除。
2.4 颠震关键参数提取
为研究破冰颠震对船舶的影响,以降低局部振动的干扰,需要拆解出颠震数据。如图9 所示,俄罗斯学者BELOV 等[6]根据频段的不同,将破冰船的垂向加速度分为4 个部分:一阶船体振动(2 ~ 4 Hz);螺旋桨二阶旋转频率引起的局部振动(3 ~ 6 Hz);螺旋桨叶频及上层建筑固有频率范围内的船体局部振动(8 ~ 12 Hz);高阶螺旋桨谐振、低速主机引起的局部振动(16 ~ 35 Hz)。

图9 船舶加速度信号分离
VON BOCK 等[15]在芬兰阿尔托大学冰实验水池通过模型实验,测量了船舶在破冰工况下的加速度时间历程,并对所得信号进行频谱分析,结果显示:破冰工况下船体运动加速度主要分布范围为0.5 ~ 4 Hz,换算成实船后为0.09 ~ 0.71 Hz。由此可见,破冰激励下的船舶运动频段在一阶振动频段之下。因此,本研究将船舶运动和一阶振动响应之和定义为破冰颠震,认为其主要分布频段为0 ~ 4 Hz。两者均为船舶的全局响应,可作为船舶关键设备的使用环境输入。
图10 为所测得的“雪龙2”号驾驶室位置加速度信号功率谱。
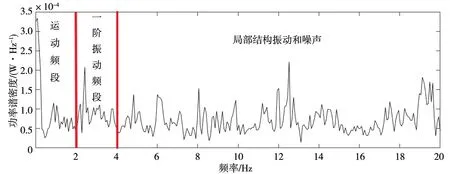
图10 “雪龙2”号驾驶室位置加速度信号功率谱分析
根据前期有限元计算以及在静水中加速度时频分析,确定本船一阶振动频率约为2.5 Hz。基于以上推理,考虑适度余量,可假设0 ~ 4 Hz 频段为颠震频段,主要成分为刚体运动(0 ~ 2 Hz)和一阶振动(2 ~ 4 Hz),通过滤波器过滤掉高阶振动和局部振动成分,可将船舶破冰颠震成分提取出来。其他频段则被认为是局部结构振动和噪声,以表2 中案例13 的船舯数据为例,不同频段的数据如图11 所示。通过这种方法,可相对合理地分离颠震成分。因采用了频带提取方法,故颠震分析结果将偏于保守,对于设备使用环境的定义也相对更安全。

图11 滤波后的不同加速度频段信号
3 识别结果与颠震分析
3.1 颠震识别结果
对“雪龙2”号的垂向加速度中颠震部分时频图中的颠震进行识别,提取船舶每分钟颠震次数。本次实验共使用320 张时频图,从中随机挑选了32 张为测试集、259 张为训练集、29 张为验证集,利用labelimg 对图像手动标注标签,如下页图12 所示。

图12 对时频图进行颠震标定
利用型号为NVIDIA RTX 3080 Ti 的GPU 进行训练,训练时平均速度为200 epoch/h。本次实验中训练迭代500 次,耗时约2.5 h。模型的识别效果如图13所示,所识别的颠震次数结果如表3所示。识别结果对于识别颠震次数精度达到81.99%,满足实际工程应用需求。

图13 颠震识别效果
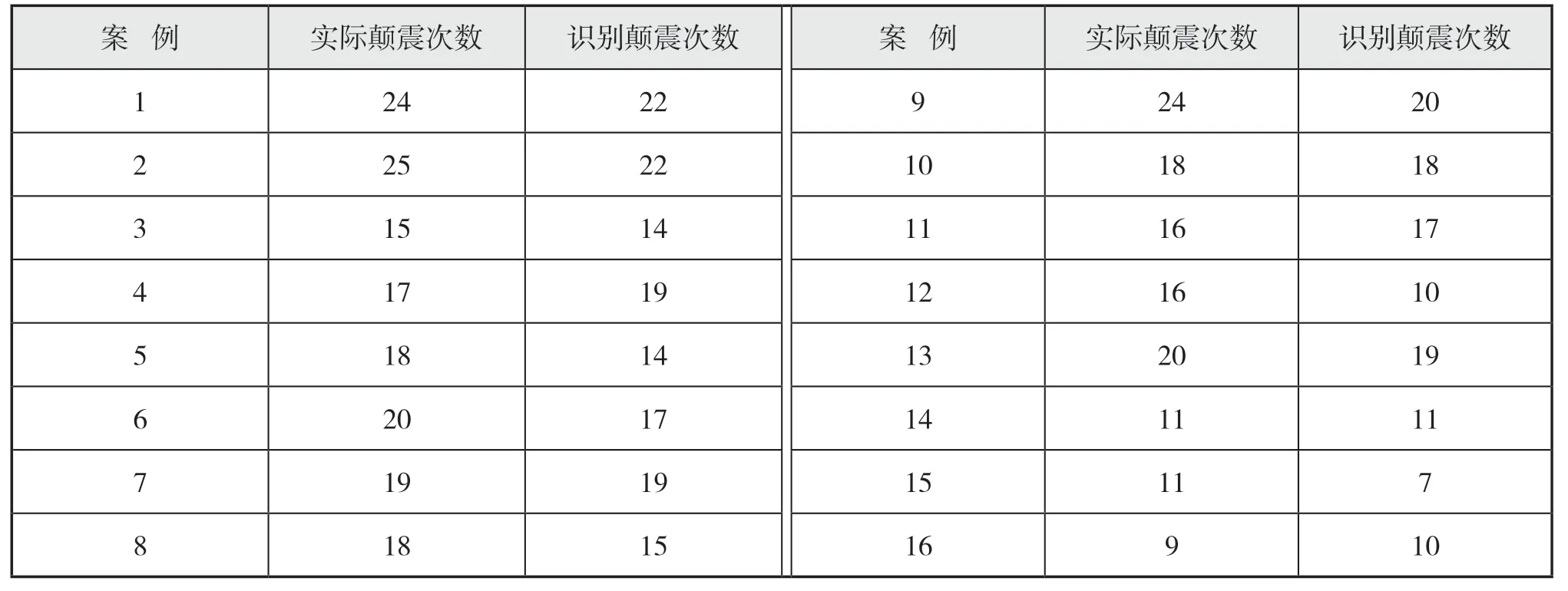
表3 颠震次数识别结果 次
3.2 颠震分析
针对不同冰况和船速,本文对16 组数据进行了详细分析,确定了颠震事件,对锚机间和驾驶室的颠震峰值加速度以及每分钟发生次数进行了统计。
文中对不同冰况和航速的设定见表4,并通过对冰况、航速进一步整合,将16 个分析案例归并为如表5 所示5 种工况。为了便于更加直观地展示,故以如图14 所示柱状图形式进行分析。
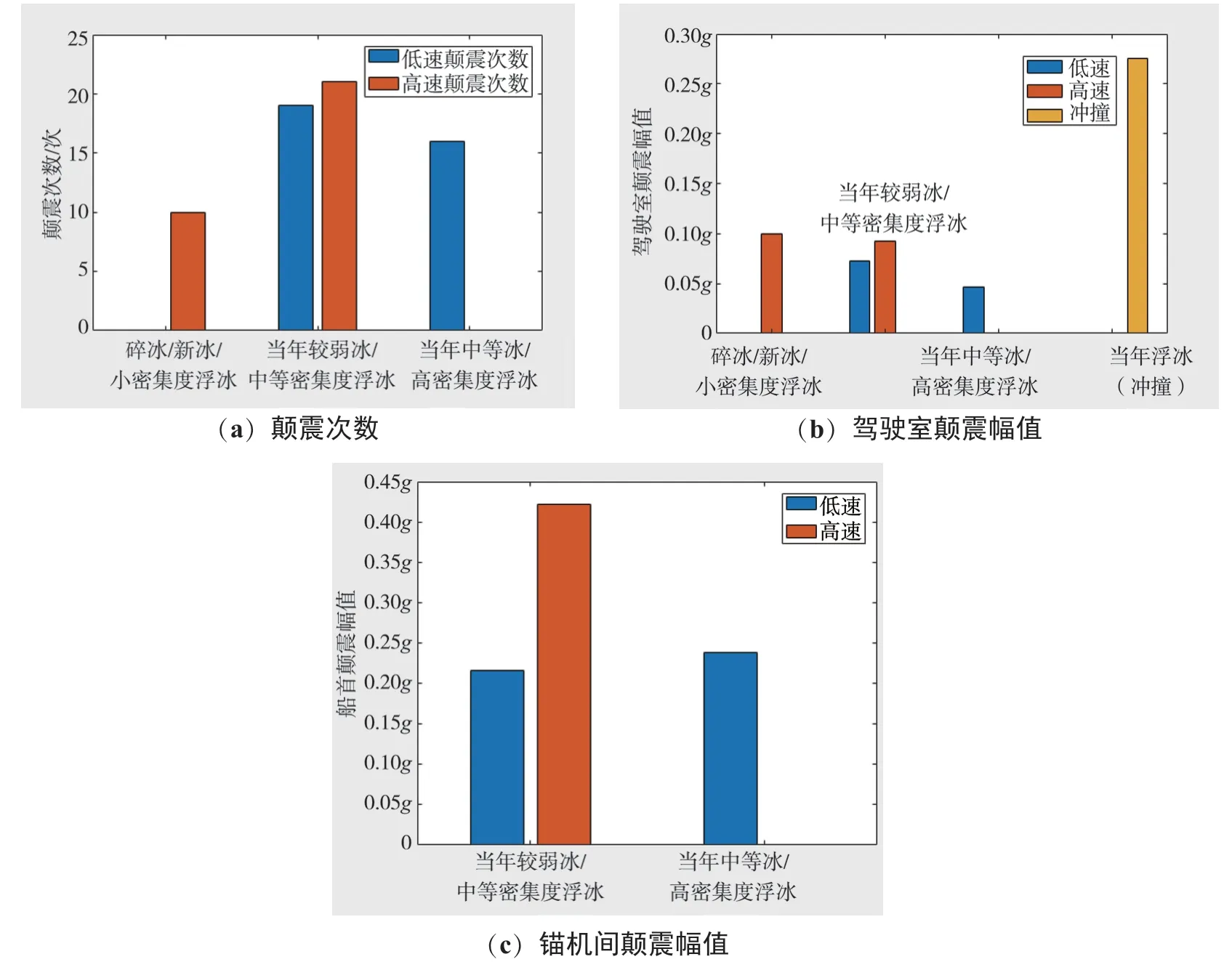
图14 “雪龙2”号垂向加速度时频分析柱状图

表4 不同冰况和航速的设定

表5 “雪龙2”号垂向加速度的时频分析
通过以上对于极地考察船加速度时频信号的分析,可得到以下结论:
(1)对比船首和船舯的幅值,可看出船首颠震幅值约为船舯位置的3 ~ 4 倍。
(2)对比不同航速和冰况下颠震次数,可以发现最严重颠震发生在中等密集度海冰冰况,且以较高速度行驶的状态;而在厚冰中,由于速度很低,颠震反而不明显。
(3)对比不同航速下的颠震次数和幅值,可见速度对颠震影响明显,航速越快、颠震次数越多、幅值越大;而冰厚对颠震的直接影响不明显,主要是通过影响船速来影响颠震。
4 结 语
本文提出一种改进的SSD 模型,对破冰颠震个数进行自动识别。通过频谱分析,本文成功分离出“雪龙2”号多次南极航行数据中的颠震信号,进而提取了颠震事件加速度幅度和发生频率,从而形成破冰颠震的识别与分析方法。通过此改进的SSD 模型识别时频图中的颠震次数,精度可达到81.99%。
基于该方法,文中进一步对各种典型场景下的破冰颠震数据进行研究,并分析了海冰环境、船舶航速、测量位置等因素对船舶颠震关键参数的影响。通过对比分析发现,船首颠震的幅值大约为船舯位置的3 ~ 4 倍。颠震最严重情况通常出现在中等海冰密集度的冰况及以较高速度行驶的状态下;而在厚冰环境下,尽管冰况较差,但由于航速降低,颠震现象反而不明显。
受限于训练集的规模以及标注准确率的制约,模型仍有进一步提升和优化的空间。在未来的研究中,可通过将更多数据纳入训练集,并对数据集进行更精确的标校,以提升模型识别准确性;同时,也将逐步细化船舶速度、冰况和导航数据等因素的分析,以深入探究这些环境变量如何影响破冰颠震,从而使模型在实际应用中更具针对性和效率。
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:16
军事文摘(2024年2期)2024-01-10 01:58:44
科学24小时(2023年11期)2023-11-14 08:47:00
机械设计与制造(2023年2期)2023-02-27 12:40:16
汽车实用技术(2021年10期)2021-06-04 07:51:00
航空世界(2018年12期)2018-07-16 08:34:34
舰船科学技术(2015年8期)2015-02-27 15:38:48
水利水电科技进展(2014年1期)2014-10-17 02:29:14
电测与仪表(2014年17期)2014-04-04 11:56:48
振动、测试与诊断(2014年6期)2014-03-01 01:14:47