给定时间有向通信网络多无人机最优集结控制
2024-02-29 07:13:50杨正全付程
科学技术与工程 2024年4期
杨正全, 付程
(中国民航大学交通科学与工程学院, 天津 300300)
近年来,随着无人机技术的日趋完善,无人机被广泛应用于电塔巡检[1],地震勘测[2]等各个领域,随着无人机应用的不断深入,单个无人机已不能满足逐渐复杂的任务要求,多无人机协同完成任务已成为无人机任务的主要表现形式,为提升任务的实现效果,多个无人机共同执行任务时通常要从不同的初始地点起飞,向某一目标地区进行集结。而无人机集结位置是否最优,集结时间的长短作为无人集结的关键指标,影响着多无人机的集结效果,进而影响着整个任务的完成效果。
对于多无人机的控制,主要分为集中式控制和分布式控制[3],集中式控制控制算法需要一个统一的控制中心来与多无人机系统中的无人机进行信息传递来指挥无人机的飞行,而无人机之间基本不需要信息交互,因此对这个控制中心有着较高的计算要求和通信要求,并且一旦控制中心遭到干扰或者被破坏,那么整个无人机编队可能会陷入瘫痪状态,相比于集中式控制方式,分布式控制方式中的无人机依靠无人机自身的控制器通过获取邻居无人机信息来调整自身姿态地与其他无人机进行协作来完成集结任务,并且在分布式控制下,倘若某架无人机出现故障对整个多无人机系统的影响也较小,因此,分布式控制方式更有利于多无人机完成集结任务。
近年来,类似多无人机集结任务的多智能体分布式最优问题得到中外大量学者的关注,有关分布式最优算法的拓扑结构主要分为无向图、权重平衡的有向图,以及权重不平衡的有向图,对于无向图的分布式算法方面,文献[4]提出有关无人机集结的分布式算法,使无人机能够在给定时间内完成集结。Li[5]研究了每个智能体为单积分动力学的分布式资源优化问题,提出了在达到最优性前提下结构简单,计算负担小的分布式投影算法,并采用增量无源性理论分析了算法的收敛性。Zou等[6]研究了非线性欧拉-拉格朗日系统的分布式优化问题,并且在分布式优化算中引入集合约束。Li等[7]研究了包含局部可行集约束和耦合不等式约束的连续时间网络的分布式优化问题。Xu等[8]研究了带有集合约束,等式约束和不等式约束的分布式优化问题,并采用比例积分策略的方法来传递状态信息。文献[9]考虑到多智能体在任务期间外部扰动的情况,提出了抗干扰的分布式优化算法,算法能够控制多智能体系统在固定时间内收敛到最优解。文献[10]考虑了带有集合约束的固定时间分布式优化问题,
设计的分布式优化算法能够满足多智能体在固定时间收敛到满足集合约束内的最优值。权重平衡有向图方面,Xu等[11]利用动态平均一致性,提出基于有向图的增广梯度式分布算法(Aug-DGM)。Yang等[12]研究了带有等式和不等式约束分布式优化问题,并且局部目标函数是非二次和非光滑的。
前人针对无向图和权重平衡的有向图的分布式优化算法开展了一系列研究,但是对于多无人机集结任务来说,受到外部信号干扰和无人机自身通信设备的影响,通讯情况为无向图和权重平衡的有向图显然是集结时的理想情况,因此研究权重不平衡的有向图的分布式优化算法对于多无人机集结十分重要。Zhu等[13]研究了权重平衡有向图下的分布式优化问题,并且算法摆脱了对于零特征值左特征向量的依赖。文献[14]提出了基于梯度跟踪和比例积分策略的固定步长的分布式优化算法。Li等[15]研究了基于比例积分(PI)控制率和事件触发通信机制的多智能体系统分布式优化算法,该算法可以在减少多智能体之间通信开销的同时,使算法达到指数收敛。
前人针对权重不平衡有向图的分布式优化算法进行更深入的研究,克服了权重不平衡有向图的不平衡性,但是上述研究在进行分布式优化时,对于优化时间考量较少。文献[9-10]提出固定时间的优化算法,但是对于收敛的固定时间依赖于算法的参数的设定,并不能做到在人为给定时间内达到最优。文献[4]提出了给定时间内的分布式最优算法,但是分布式算法的通讯图为无向图,因此设计基于权重不平衡有向图下给定时间的分步式优化算法不仅能够满足多无人机给定时间最优集结的要求,还可以丰富分布式优化理论,具有很要的现实意义。
鉴于此,采用通信网络拉普拉斯矩阵零特征值对应的左特征向量来消除权重不平衡有向通信网络的不平衡性,采用时域映射的方法解决无人机在给定时间内的集结问题,并将二者与分布式优化的控制思想结合起来,提出一种新的多无人机集结控制算法,在算法的可行性分析方面,结合凸分析理论和李雅普诺夫稳定性论,从理论的角度验证了算法能够控制无人机收敛到全局最优的位置,并通过MATLAB仿真进一步验证算法的可行性。以期充分考虑无人机集结时通信网络的不平衡性与集结时间的限制,更符合无人机真实的任务环境,使算法更具有现实意义,同时也丰富分布式优化理论的研究。
1 预备知识
1.1 符号说明
R为实数集;Rn为n维欧式空间;Rm×n为m×n的实矩阵;In为n维单位矩阵;给定n个列向量y1,y2,…,yn,col(y1,y2,…,yn)为堆叠向量yi(i=1,2,…,n);diag(·)表示对角矩阵;设矩阵F∈Rm×n;FT为矩阵F的转置矩阵;‖F‖为矩阵F的欧式范数;‖y‖为向量y的欧式范数,F⊗G为矩阵F和矩阵G的克罗内克积。
1.2 图论

引理1若图G为强连通的,LN为图G的拉普拉斯矩阵,则有以下内容成立。
(1)对于LN零特征值λ1(LN),存在正的左特征向量ξ=(ξ1,ξ2,…,ξN)T并且左特征向量ξ有以下性质。

1.3 凸分析
对于连续可微函数f:Rn→R,▽f为f梯度;f为强凸函数,当且存在m∈R>0,满足式(1)。
(x-y)T[▽f(x)-▽f(y)]≥m‖x-y‖2,
∀x,y∈R,x≠y
(1)
函数f是C-lipchitz连续的当且仅当
‖f(x)-f(y)‖≤C‖x-y‖2, ∀x,y∈R
(2)
式(2)中:常数C>0。
2 问题描述
在分布式通信情况下,假设N(N>2)架无人机需要集结到同一个任务区域,无人机的出发点任意选取,在进行集结时,要求N架无人机的集结点选取为全局最优,并且为了保证后续任务能够正常进行,要求N架无人机在给定时间T内全部集结完毕,综上所述,将以上文字问题改写为分布式问题,可表示为
(3)
式(3)中:xi为每架无人机的位置;fi(xi):Rn→R为无人机的局部决策函数;f(x)为全局决策函数;x为无人机在满足全局最优情况下的位置。
为了解决上述无人机最优集结问题,需要满足以下假设。
假设1多无人机间通信关系图G是强连通的。
假设2局部目标函数fi是连续可微的并且是mi-强凸函数,其中常数mi>0。
假设3对于梯度▽fi是C-lipchitz的,其中C>0。
假设D∈Rn×m,vec(D)为堆叠D每列的向量从而获得一个n×m的列向量,在这个基础上有两个关键引理成立,具体如下。
引理2A∈Rv×j,B∈Rj×v,则有tr(AB)=tr(BA)=[vec(AT)]Tvec(B)。
引理3A∈Rv×j,B∈Rj×p,C∈Rp×l,则有vec(ABC)=(CT⊗A)vec(B)。
3 算法设计以及收敛性分析
3.1 算法设计
为了解决式(3)表示的问题,提出基于连续时间的分布式优化算法,其中多无人机间的通信网络是权重不平衡的,这表示各个无人机间的通信不是畅通无阻的,而是受到权重不平衡有向网络限制的,算法的目标是使多无人机在给定时间内集结到全局最优的位置。
对多无人机实施以下算法。
(4)

借鉴文献[4]的时域转换的方法,将上述给定时间的优化算法转化为无限时域的分布式优化问题。上述算法中,多无人机的集结时间上界为T,当t∈[0,T)时,采用以下时域坐标映射将有限时域t变换为无限时域τ,可表示为
(5)
逆变换记为
(6)
将式(6)左右两边对τ进行求导可得
(7)
因此,根据以上建立的有限时域和无限时域的关系,得出以下基于无限时域τ内的表达式为
(8)
令x=col(x1,x2,…,xn),y=col(y1,y2,…,yn),Z=diag(z11,z22,…,zNN),z=col(z1,z2,…,zn),▽f=col[▽f1(x1),▽f2(x2),…,▽fN(xN)]。
可将上述算法重写为
(9)

3.2 最优性分析
接下来证明式(9)的有效性,第一步是证明平衡点与最优解的关系

col(x*,y*)是式(9)的平衡点,因此有
(10)
式(10)中:a为常数。

将式(10)的两个等式左乘ξT⊗In,结合上面的结果,可以推出

(11)
因此,证明了系统的平衡点既是最优点,引理6成立
3.3 收敛性分析
在假设2~假设4成立并满足式(12)成立。
(12)

(13)
式(13)中:
(14)

(15)
构造Lyapunov函数,可表示为
V1(X,Y)=XT(E⊗In)X
(16)
V1(X,Y)关于式(17)的导数为

(17)
定义H=(X1,X2,…,XN)∈Rn×N,D=(d1,d2,…,dN),其中,di=col(di1,di2,…,din)∈Rn,J=(1N,η2,η3,…,ηN)∈RN×N,因此coli(HT)=d1i1N+d2iη2+…+dNiηN,HT=JDT,H=DJT,通过引理3,X=vec(H)=vec(DJT)=(IN⊗D)vec(JT),定义P=(Y1,Y2,…,YN),并结合引理4可得
XT(E⊗In)Y=[(IN⊗D)vec(JT)]T(E⊗In)vec(P)
=vec(JT)Tvec(PDTE)
=tr(JPDTE)

(18)
XT(E⊗In)Y=tr(PEB)
=vec(BT)Tvec(PE)
(19)
对于任意ζ>0,根据YOUNG不等式,可得
(20)
因此有
(21)





=λ2‖κ‖2
(22)

综上,
(23)
定义:
V2(X,Y)=XT(E⊗In)Y
(24)
V2(X,Y)关于式(24)的导数为
(25)
因为E=diag(ξ1,ξ2,…,ξN),所以可以得到YT(E⊗In)Y≥ξmin‖Y‖2根据假设3,g(X)≤M‖X‖,根据YOUNG不等式有
(26)
因此有
(27)
定义:
V3(X,Y)=YT(E⊗In)Y
(28)
V3(X,Y)关于式(28)的导数为
(29)
综上定义:
(30)
(31)
为问题(1)的最优解。接下来考虑系统的扰动系统g(τ,ω)+u(τ),根据文献[16],存在一些正常数δ、ϑ使得

4 仿真验证
考虑10架无人机从随机位置出发,10架无人机构成权重不平衡有向通信网络,假设通信网络构成的邻接矩阵为
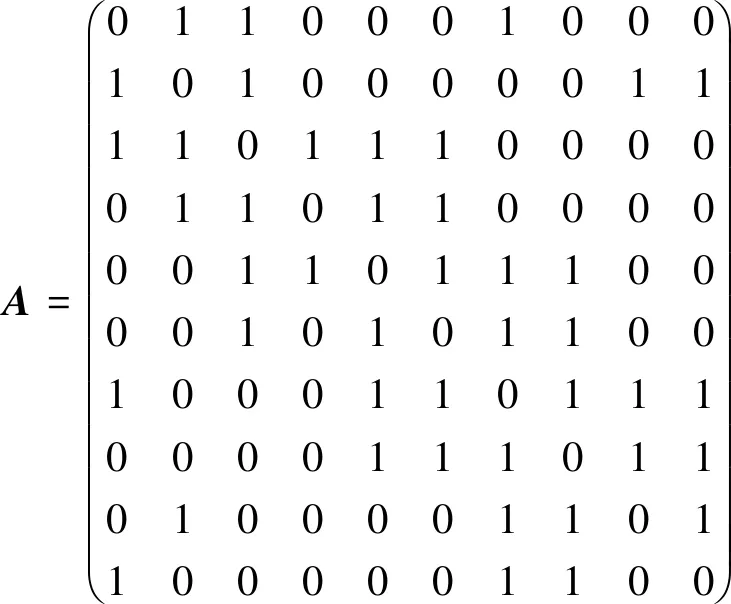
(32)
10架无人机的局部目标函数如式(33)所示,其中fi(x)∈R2。
(33)

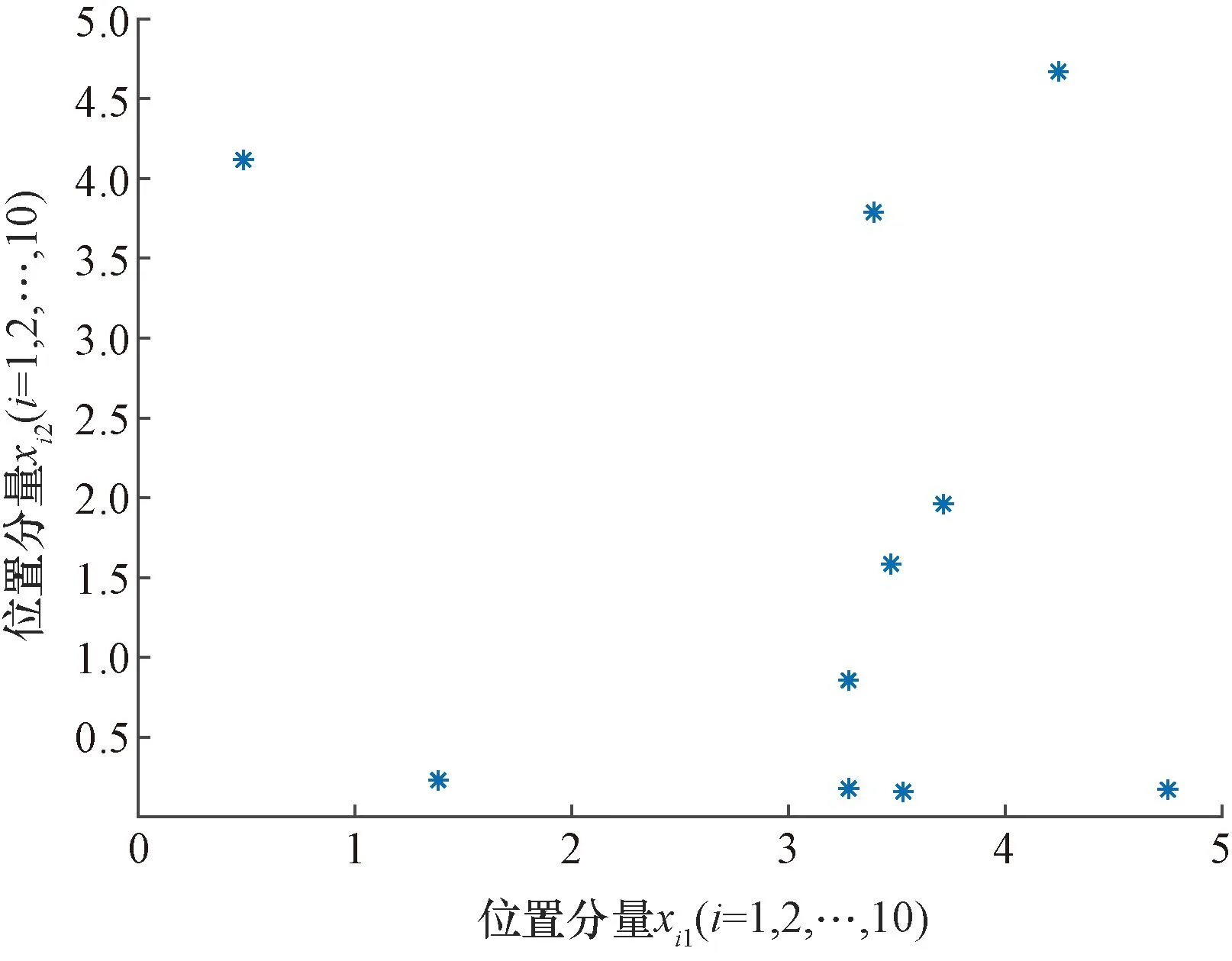
图1 10架无人机的初始位置Fig.1 Initial position of 10 drones
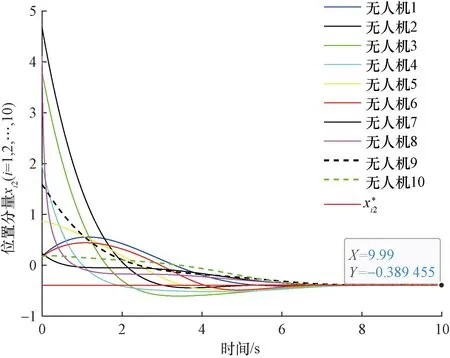
图3 无人机状态轨迹xi2Fig.3 Drone state trajectory xi2
5 结论
研究无人机集结问题,设计控制无人机集结的算法,使无人机在集结过程中依靠权重不平衡的通信网络下收集的有限的邻机信息来进行不断地自我位置调整,最终实现在全局最优集结位置进行集结,集结时考虑集结时间这一无人机任务的关键因素,使整个无人机机队能够在给定时间内达到集结位置,在算法收敛性证明时,将有限时间的分布式优化问题转化为无限时间的分布式优化问题,降低了证明的复杂性,通过理论证明了算法能够渐进收敛到全局最优的位置,最后通过MATLAB仿真进一步验证了算法的可行性。未来将研究带有约束的给定世间最优集结问题以及带有约束的基于权重不平衡有向网络的多无人机最优集结问。
猜你喜欢
云南民族大学学报(自然科学版)(2021年3期)2021-06-24 09:07:06
测控技术(2018年11期)2018-12-07 05:49:02
四川师范大学学报(自然科学版)(2018年4期)2018-07-04 11:53:22
能源(2017年10期)2017-12-20 05:54:07
廊坊师范学院学报(自然科学版)(2017年3期)2017-10-11 02:14:06
能源(2017年5期)2017-07-06 09:25:54
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
西北工业大学学报(2015年4期)2016-01-19 03:31:55
雷达与对抗(2015年3期)2015-12-09 02:38:50
电测与仪表(2015年2期)2015-04-09 11:28:50