面向环形管道的电力巡检机器人设计与环境建图
2024-02-29 06:28:26李辉罗勇黄世超苏浩鸿季子铭裴轩
科学技术与工程 2024年4期
李辉, 罗勇, 黄世超, 苏浩鸿, 季子铭, 裴轩*
(1.雅砻江流域水电开发有限公司官地水电站, 凉山彝族自治州 615000; 2.北京航空航天大学机械工程及自动化学院, 北京 100191; 3. 北京交通大学电子信息工程学院, 北京 100044)
在一些大型发电厂中,常将电缆铺设在管道内,尤其是大型水电站中的离相封闭母线(isolated phase enclosed bus,IPB)。在管道内部,支撑绝缘子、焊缝等可能会出现裂纹,对电网的正常运行带来威胁[1],因此,在电网的运行过程中,需要对电缆及管道内进行定期巡检,以发现潜在隐患。目前大多数巡检任务由人工完成,然而,由于管道内是密闭空间,操作空间小[2],并且,在检修过程中,需要进行一些如搭脚手架、拆卸管道的操作,导致人力检测的效率低。该场景下对半无人化或无人化的巡检系统的需求迫切。
巡检机器人是一种有效的解决方案[3]。巡检机器人可通过远程或自主控制的方式,在预定路线上巡查,机器人可搭载视觉摄像头、红外摄像头、紫外摄像头、激光雷达等感知设备,利用特定的算法及策略发现可能存在的缺陷。任新新等[4]使用二值化的图像处理方式,判断管内杂物并清理。胡文韬[5]设计了一款轮式移动机器人,用于管道内的杂物清扫,并对管内杂物、裂缝等进行图像处理,形成了缺陷的目标识别及定位功能。以上管道内巡检机器人都是通过视觉来远程遥控机器人,并未探索机器人的全自主运行。另外,IPB管道既有水平、也有垂直布置,给机器人在管道内的行走带来困难[6]。
为实现机器人的自主行走,首先,针对巡检机器人的垂直和水平管道攀爬需求,设计了一种双悬挂的移动机器人本体;其次,移动机器人需要自身的准确定位[7-8],即机器人的即时定位与建图(simultaneous localization and mapping, SLAM)。而管道存在特征重复、可区分特征少、基准面为曲面的特性,因此管道内的SLAM技术鲜有研究。本研究中,设计基于柱坐标系的激光点云配准方法,并在仿真实验验证环境建图的快速性和精确性。实际场景分别测试机器人在竖直段、水平段的轴向和周向运动,验证该巡检机器人系统的有效性及适应性。
1 机器人总体设计
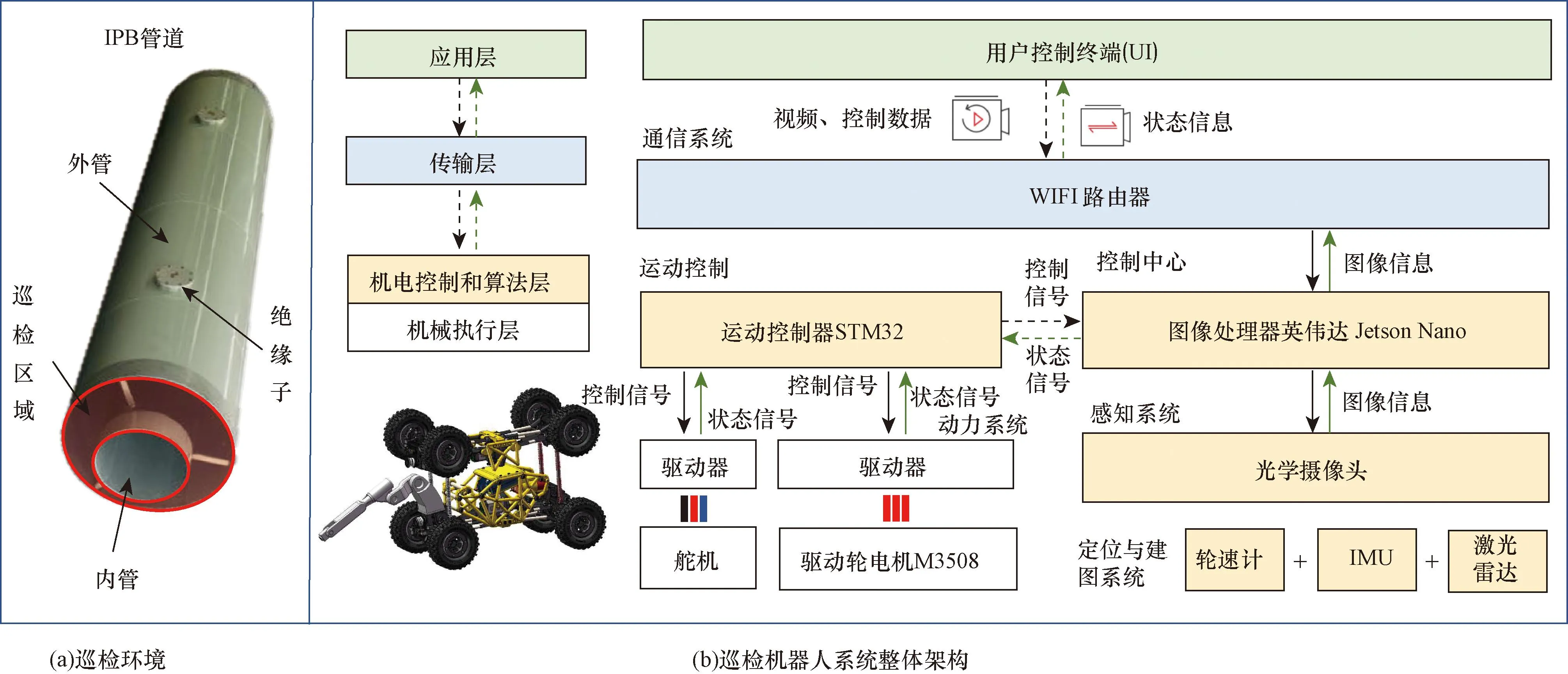
巡检机器人运行于高压电缆管道中,采用离相封闭母线 (isolated phase enclosed bus,IPB)的形式,即母线具有单独的外壳,且外壳间具有空隙隔离,形成了一种大管套小管的圆环形检测管道形式 [图1(a)]。巡检机器人在水平和垂直的管道中运行,使用视觉传感器对管道内异物,裂缝等缺陷进行巡检,使用激光雷达、惯性测量单元(inertial measurement unit, IMU)等实现机器人的定位与建图。
NVIDIA Jetson Nano为图像处理器英伟达Jetson Nano图1 巡检机器人的总体框架图Fig.1 Overview of the inspection robot
电力巡检机器人系统的框架如[图1(b)]所示,自底向上包含:机械执行层、机电控制和算法层、传输层和应用层。机械执行层为巡检机器人的移动、攀爬吸附、机械臂抓取等结构形式。机电控制和算法层通过对传感器的信息感知,采用特定策略决策并执行运动规划、轨迹跟随、运动控制等操作。传输层是对采集的视频信号、控制及状态信号的数据转发,实现控制中心与机器人端的数据交换。应用层则为视频的可视化及控制指令的输入界面。
2 机器人本体设计
对于垂直管道攀爬机器人,可从移动方式和壁面附着方式两方面着手。对于移动方式,常见机器人可分为轮式[9]、履带式[10]、足式[11]、轨道式[12]、蠕动式[13]等。而壁面附着方式可分为负压式[14]、磁吸附[15]、推力附着[16]、抓持式[17]等。总结以上方式的优缺点如表1所示。
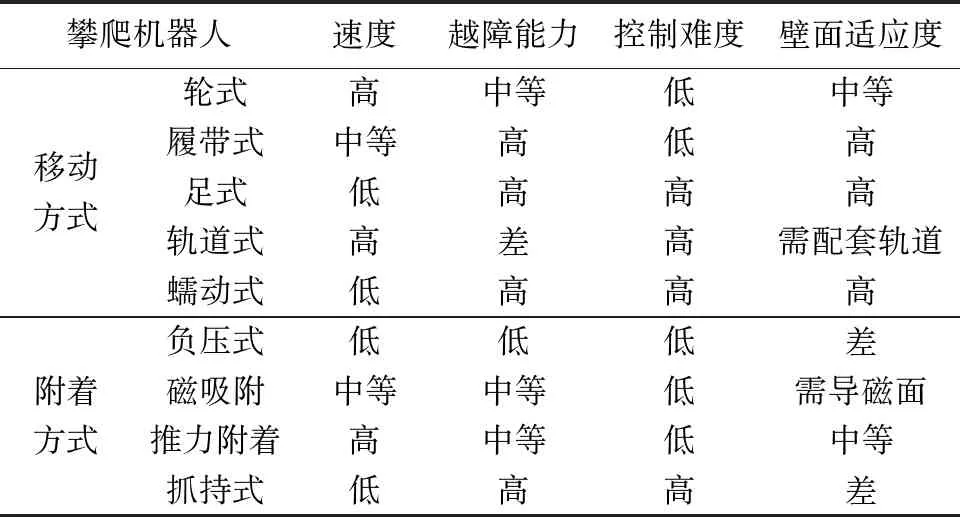
表1 攀爬机器人移动及附着方式对比Table 1 Comparison of moving and attachment methods of climbing robots
管道为金属大圆环面,对于小型巡检机器人,可认为是接近于平面的移动。另外,管道内为封闭环境,其障碍物较少。结合表1分析可知,以高速度及低控制难度为基准,设计轮式推力附着攀爬机器人为基本框架。
2.1 总体构型
巡检机器人的整体外型如图2(a)所示,采用上下底盘的设计方案,上、下底盘分别与内、外管接触。下底盘有一套动力装置,包括一个大扭力电机和一个转向舵机,保证行驶过程的动力。电机通过传动系统为4个轮子带来驱动力,车身前设计阿克曼转向机构,使用舵机控制机器人的行驶方向。两底盘间均设计悬挂装置,即通过弹簧预设压紧力的方式,使机器人在水平和竖直环形管道环境(管距L为265~269 mm)具有强的自适应附着能力和优秀的攀爬、通过能力。所设计机器人长l为460 mm,宽w为245 mm,高度h为300 mm, 通过压紧装置可调节高度范围为240~300 mm,即h∈[240 m, 300 m],以适应不同管距。
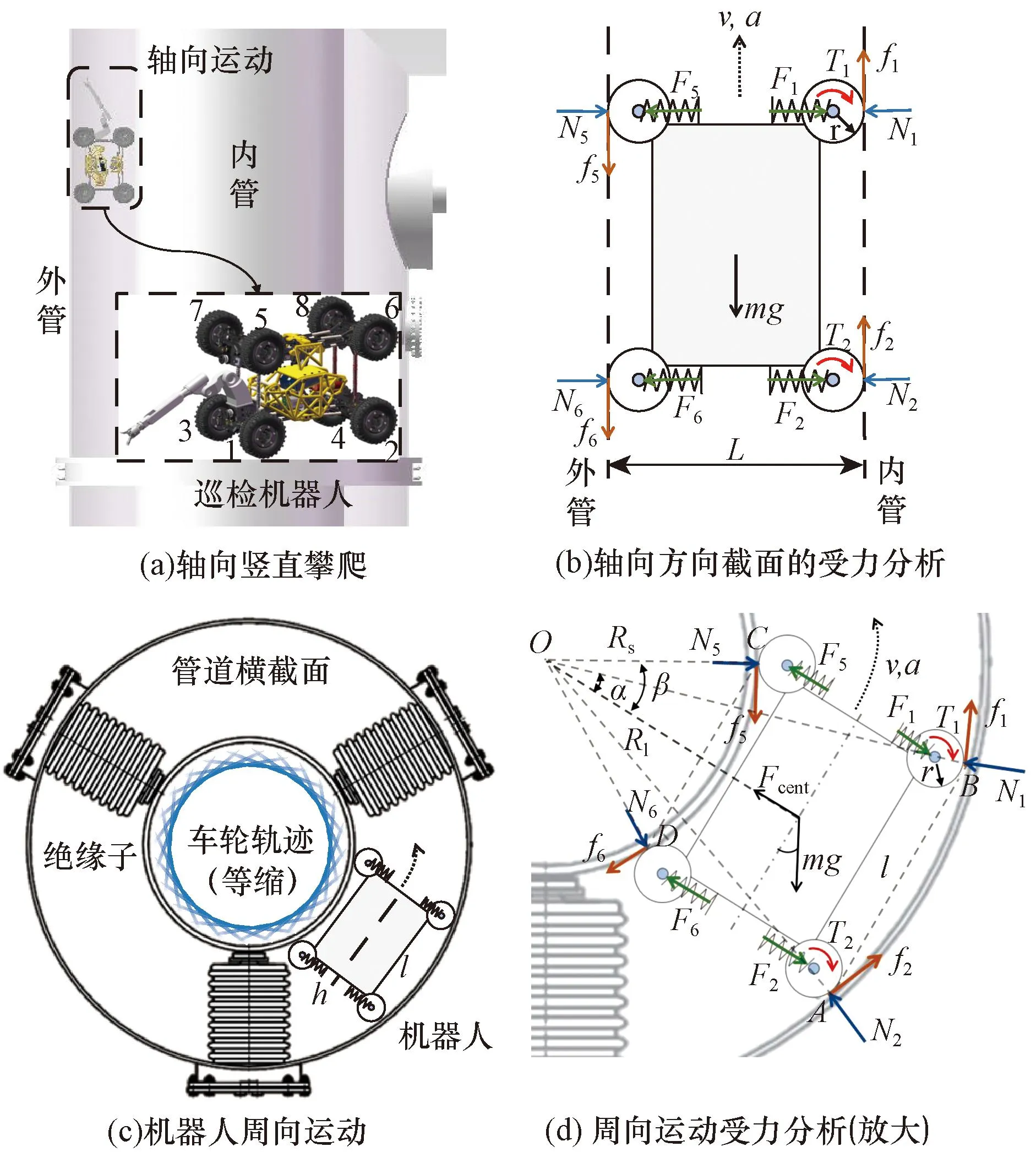
Ti为电机提供驱动力矩,i=1,2;Ni为壁面对轮的支撑力,i=1,2,…,6;Rs和Rl分别为圆环管道内管与外管半径;fi为对轮的摩擦力,i=1,2,…,6;Fi为在各轮的产生力,i=1,2,…,6;悬挂系统由刚度为k的弹簧组成;m为机器人的总体质量;g为重力加速度;Fcent为向心力;α、β分别为被动轮、主动轮与车体中心轴线夹角;L为管距;l为车长图2 巡检机器人运动分析Fig.2 Motion analysis of inspection robot
2.2 动力学分析
巡检机器人下底盘采用四驱的动力设置,上盘为被动轮,实现水平及竖直两种方式行走,其中轴竖直方向与周向运动上设计的推力附着系统,提供足够的摩擦力以保证攀爬机器人运行。
2.2.1 轴向竖直分析
针对管道轴向方向上的剖面进行受力分析,如图2(b)所示。机器人以速度为v、加速度为a沿着壁面向上运动。假设轮序号为i,4个主动轮i∈{1~4},4个从动轮i∈{5~8},如图2(a)所示。
受力分析,可得
(1)
式(1)中:xi为第i个弹簧的工作长度;r为金属夹胎的直径;x0为初始长度;k为悬挂系统的弹簧刚度;μ为轮胎与管壁的摩擦系数。
对于驱动动力,底盘设计1个直流电机通过金属车桥将动力传输到n(n=4)个轮子上,故共有直流电机数量N为1,为保证稳定性和通过能力,选用直径r为100 mm的金属夹胎。巡检机器人平台总重m约10 kg, 当机器人竖直移动时,所需的电机转矩与功率最大, 取峰值加速度a为1 m/s2,此时需要的电机最大输出扭矩为
(2)
考虑最高运行速度vm=5 km/h。电机转速需满足:
(3)
可选用7.2 V、额定转速482 r/min、最大扭力2.8 N·m的直流无刷电机(M3508, robomaster, 大疆),搭配电调(C620, robomaster, 大疆)实现正弦驱动。上、下底盘各一个LF-20MG舵机,在工作电压下堵转力矩可达到18 kg·cm。通过与拉杆连接带动车轴控制前轮的方向进行转向。
行驶过程中轮胎与管壁主要是滚动摩擦。为保证能够提供足够大的压力,保持机器人不发生滑动摩擦,也就是向下滑落,可减小轮胎的胎压,增大轮胎与管壁的摩擦系数μ[18],每个轮预紧力均相等,可得预紧力为
(4)
可确定悬挂系统的弹簧刚度k和预紧距离d0需满足式(5)。
k(x0-d0)≥Fi
(5)
2.2.2 周向运动分析
如图2(c)所示,考虑机器人的车长l,车轮在圆形壁面上的运行轨迹实际上是长为l的割线环绕着圆心运动,可形成圆形的包络线即为实际的车轮运行轨迹。与竖直方向上运行相似,机器人以切线速度v和加速度a环绕行进,如图2(d)所示,可建立周向运动过程中的力学模型,机器人的圆周运动需考虑向心运动,其向心力Fcent满足
(6)
假定圆环管道内管与外管半径分别为Rs和Rl,轮所受支撑力Ni和摩擦力fi的方向分别为轮接触点[图2(d)中A、B、C、D]在管壁的切线方向及垂直于切线方向,可表示为
(7)
车体与垂直方向上的夹角为θ,则被动轮、主动轮与车体中心轴线夹角分别为α和β,可表示为
(8)
根据机器人的受力方向分解,则需满足关系如式(9)所示。
(9)
机器人周向运动在其他象限分析相似。
2.3 通过性分析
为使得机器人能够顺利从水平段行驶至竖直段,对于机器人的运动过程进行分析,如图3所示,可分为5个阶段。
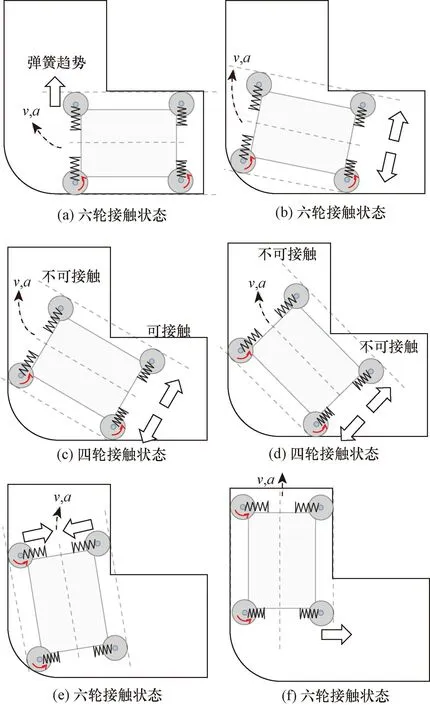
图3 机器人在弯头连接通过性分析Fig.3 Passability analysis of robot at pipelineelbow pipeline
(1)在水平段时,机器人首先从八轮接触变成六轮接触[图3(a)],前端弹簧悬挂系统势能释放,使车头出现翘头趋势,有助于完成车体旋转。
(2)车体沿着竖直管壁进行旋转,此时仍保持六轮接触[图3(b)],此过程后轮的悬挂系统释放势能,车体上升,使后轮上下皆可接触[图3(c)]。需注意的是,为防止车架与管道干涉,在设计过程中需去除上底盘在车长方向上的横梁。
(3)当车体后轮悬挂系统充分释放,上底盘的前后轮均不接触管壁,由下底盘的驱动继续提供旋转向上的力[图3(d)]。因此,需要尽可能减少此过程完成时间,可从增大通过速度和增加轮胎摩擦系数。
(4)车体继续旋转,直至机器人前上侧轮接触到竖直管壁[图3(e)],此时前侧的悬挂系统发挥作用,增大轮胎摩擦力,将机器人车身向上拉,机器人边旋转边上升。
(5)机器人与管壁六轮接触[图3(f)],机器人直线上升,直至后端轮与管壁接触,即可完成整个通过过程。
3 管内环境建图
3.1 场景分析
IPB管道为外管接内管形成环形截面,两者之间有绝缘子连接[图2(c)]。机器人搭载激光雷达对管道内环扫并前进,多帧点云叠加即可形成管道内地图。
然而,环形管道在环形扫描中的特征几乎一致,即使绝缘子可为其提供可用特征,但是其数量较少,在使用经典的激光SLAM算法:激光雷达里程计建图 (lidar odometry and mapping, LOAM)算法[19]进行点云建图时,雷达实际环绕一圈,然而获得约1/2圈的地图,即发生混叠,如图4所示。
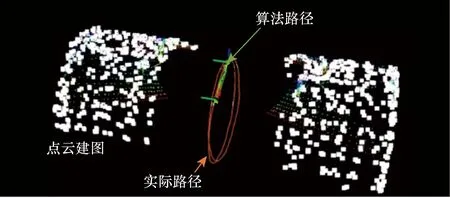
图4 LOAM在管道中的错误建图Fig.4 Failed mapping using the LOAM algorithm in the pipeline
3.2 点云配准方法
将笛卡尔坐标系下的xyz正交坐标表示变换为柱坐标系下ρθz的正交坐标表示,即
(10)
(11)
图5为激光雷达环扫管道沿z轴方向的截面图,经过坐标变化,可获得以下效果:①内外环状管道变为柱坐标系下的平直管道;②绝缘子在柱坐标系下从x,y轴转成沿ρ轴展开,分离度显著;③机器人的绕圆周运动变为柱坐标系下沿θ轴的平移运动,即Δθ,可减少计算量;沿管道纵深z轴的移动在柱坐标系下保持不变,即Δz。
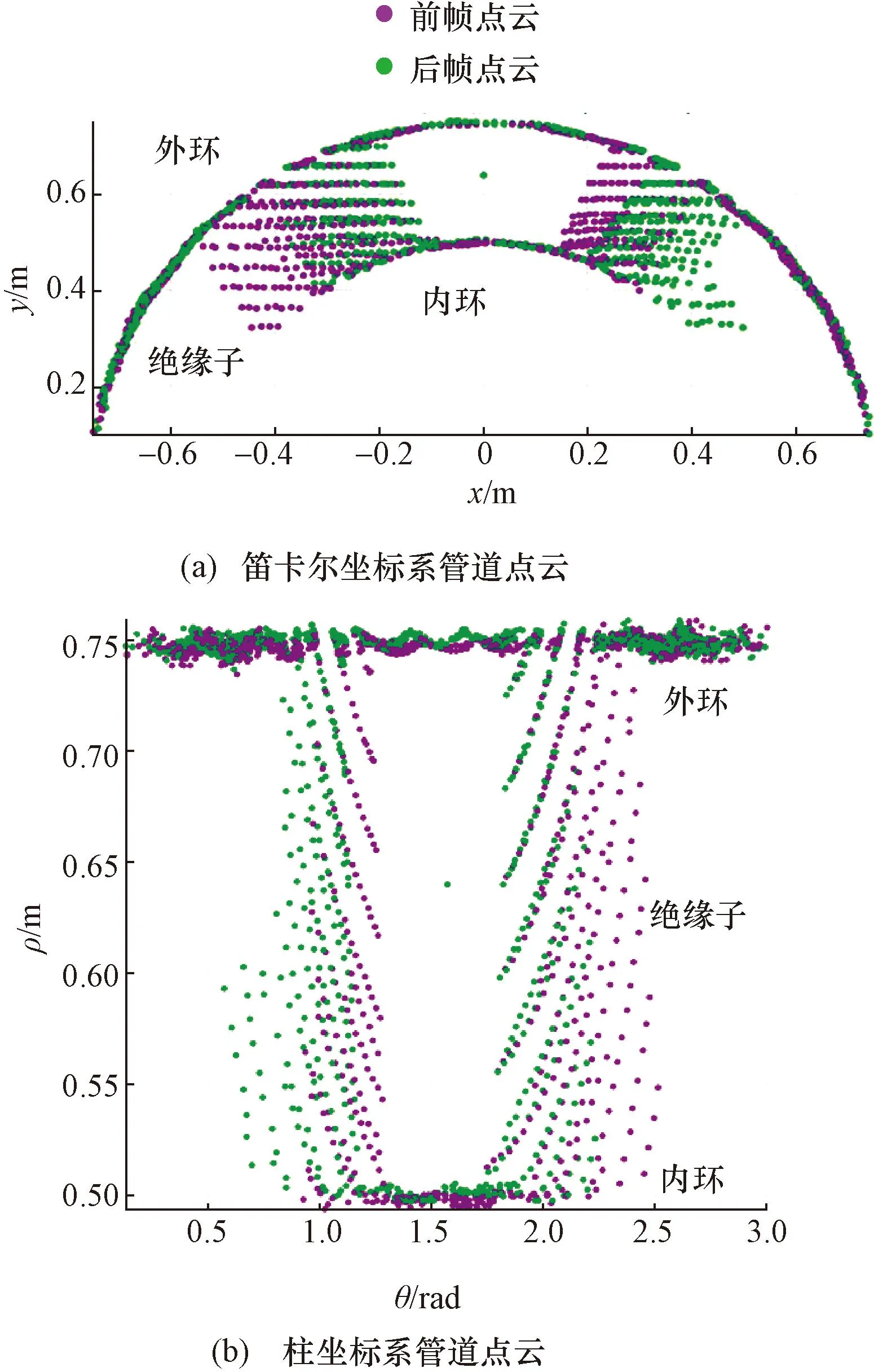
ρ为极轴坐标图5 环形管道点云分布Fig.5 Point cloud distribution of circular pipe
而后对两帧点云进行最佳匹配,定义相邻两帧点云为P={p1,p2, …,pi, …,pn},Q={q1,q2, …,qi, …,qn},两帧点云之间变换关系满足:
∀i,qi=Rpi+t
(12)
式(12)中:R为旋转矩阵;t为平移矩阵;pi、qi分别为点云P、Q中的第i个元素。
优化目标使得两帧点云之间的误差平方和最小,即
(13)
分别计算两帧点云之间的质心,即
(14)
则平移向量的最优值为
(15)
式(15)中:柱坐标系下无姿态差异两点云旋转矩阵R为3阶单位阵。
使用以上方法即可对数据集点云循环遍历进行运动估计与建图。
4 运行测试实验
4.1 行走实验
依据实际场景模拟运行环境,内管道和外管道的直径分别为450 mm和1 000 mm,可分为水平和竖直段,使用透明亚克力材料来搭建IPB管道测试场景,以便观测机器人的运动状态。调整巡检机器人的各个悬挂的预紧力,使得轮胎充分接触管道壁面。使用遥控器控制巡检机器人分别行走于水平轴向段、水平周向段和竖直轴向段,以观测巡检机器人在管道内的运行状态。
如图6(a)所示,巡检机器人在水平轴向段的所有轮胎均充分接触,具有良好的性能。在水平周向段[图6(b)],由于行走过程中可转向运动,即不完全为周向运动,还有沿着轴向的运动,整体轨迹为周向方向与轴向方向的运动叠加,因此轮胎并不是完全贴合。但是由于其预紧力的作用,机器人仍然可以在管道内完成周向运动。对于竖直轴向段[图6(c)],机器人从水平段过渡至竖直段的整个过程,由八轮接触变为两次六轮接触,前者为后四轮与前下两轮,而后转变成前四轮与后下两轮接触,到达竖直段后完成八轮接触。实验验证弹簧的预紧力可提供足够的压力,可使得机器人从水平轴向段直角转弯,向着竖直段向上爬行。使得机器人在竖直管道内攀爬。
4.2 管道建图
建立管道三维模型[图7(a)],在机器人操作系统ROS中搭建仿真环境,机器人搭载激光雷达在管道内进行10圈的环形扫描,可获得机器人在轴向方向上前端和后端稠密的点云数据[图7(c)],将其作为标准的点云数据。
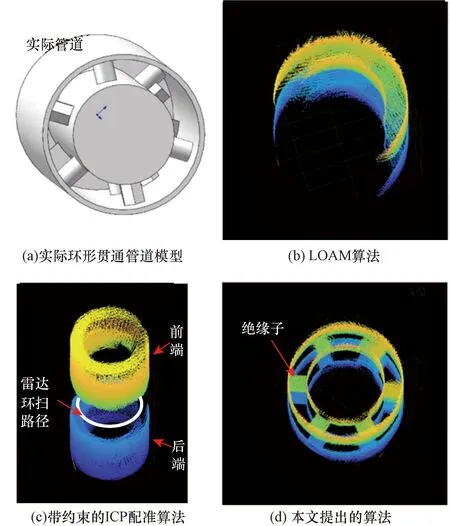
图7 管道SLAM建图结果对比Fig.7 Comparison of SLAM mapping results in the pipeline
为验证本文提出建图方法的有效性和效率,分别将该方法与LOAM[19]、迭代最近点 (iterative closest point, ICP)[20]建图方法进行对比,其中ICP方法添加了旋转的运动约束,建图结果如图7所示。LOAM算法和带约束的ICP方法均无法正确建图,其中LOAM[图7(b)]的结果无法收敛,完成了约半圈的建图,ICP方法在添加约束后,可完成整圈的建图[图7(c)],但是其中的绝缘子特征出现叠加混沌,表现为出帧间旋转角度估计不准确。本文方法[图7(d)]可完成完整建图,且绝缘子特征明显。
为验证各方法的计算效率,分别使用ICP、LOAM以及本文方法,在同一环形管道数据上运行,记录其配准拼接步骤计算时间以及迭代次数,因ICP和LOAM方法并未完成收敛,因此对比单步迭代的平均时间,结果如表2所示。得益于坐标转换的计算简化,相较于ICP和LOAM方法,使用本文方法计算时间减少约26%与66%,验证了本文方法的运行效率。

表2 不同SLAM算法单步平均计算时间对比Table 2 Comparison of single-step average calculation time of different SLAM algorithms
5 结论
为解决离相封闭母线(IPB)管道这种大管套小管的巡检场景,完成机器人本体设计与环境建图。得出如下结论。
(1) 搭建了一款可在水平、竖直段上行走的轮式巡检机器人。设计基于双悬挂的推力附着结构,通过分析机器人在竖直段以及周向段的动力学,完成机器人的动力系统选型及设计,实验验证了机器人在管道内的轴向、周向的水平运动和轴向的竖直运动的适应能力。
(2) 提出基于柱坐标系的管道点云配准方法,仿真实验验证该方法可实现IPB管道的正确建图,且平均单步计算时间优于LOAM及ICP方法,解决了现有SLAM算法 (LOAM、ICP) 对环形管道存在无法正确建图的问题。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:53:32
汽车工程师(2021年12期)2022-01-17 02:29:56
水泵技术(2021年5期)2021-12-31 05:26:40
电子制作(2019年10期)2019-06-17 11:45:06
成都信息工程大学学报(2018年4期)2019-01-23 06:57:18
制造技术与机床(2018年12期)2018-12-23 02:41:12
制造技术与机床(2017年10期)2017-11-28 05:20:58
自动化学报(2017年4期)2017-06-15 20:28:55
轮胎工业(2017年11期)2017-03-10 19:33:31
制造技术与机床(2015年10期)2015-04-09 07:05:48