用于DR-HVDC 系统连接的海上风电场电网形成控制方法
2024-02-26 07:40:10郭文花沈顺群
电源学报 2024年1期
郭文花,沈顺群,刘 凯
(1.山西铁道职业技术学院机电工程系,太原 030013;2.国网湖北省电力有限公司神农架供电公司,神农架 442400;3.武汉大学电气与自动化学院,武汉 430072)
近年来,海上风力发电占比逐年攀升,2020 年我国海上风电新增装机量达306 万千瓦[1]。而随着海上风力发电容量的进一步增加,各种单元都集中在其发电和输电系统上。高压交流线路主要用于海上电能传输[2],然而,交流线路的使用仅限于相对靠近海岸(如果中间没有补偿设备,则需小于80 km)的海上风电场OWF(offshore wind farm)[3-5]。对于远程OWF,高压直流HVDC(high voltage direct current)输电系统是一种经济高效的解决方案[6]。迄今为止,海上高压直流输电中的功率转换一直基于电压源变流器VSC(voltage-sourced converter),其具有有功功率和无功功率独立控制、电流控制和电网形成控制等技术优势[7],然而,随着深海风电场和海上电网的建立,基于二极管整流器的高压直流DRHVDC(diode rectifier-high voltage direct current)输电系统已逐渐成为深海OWFs 电能传输的有效解决方案之一[8]。
与传统基于电压源变流器的高压直流输电(VSC-HVDC)相比,DR-HVDC 具有以下优点[9-12]:在海上平台上的占地面积更小、效率更高、可靠性更高(因为其电力电子元件更少)和成本更低,但它的主要缺点是海上交流侧变流器缺乏电网形成能力。因此,此类传输系统依赖于海上风机WT(wind turbine)变流器控制原理,从电网跟随变化为电网形成[13]。然而,控制原理的变化是影响DR-HVDC 应用的主要障碍之一。目前,DR-HVDC 存在的主要问题为:其不具备电网形成控制能力,且高度依赖对海上风机变流器的控制模式,需要海上风机将电网跟随控制模式切换为电网形成控制模式,从而造成海上风电变流器控制难度增大,系统稳定性变差。针对这一问题,国内外学者开展了一系列研究。文献[3]首次提出了DR 连接WTs 的电网形成控制,该方法采用集中控制维持风电场的电压和频率在规定范围内;文献[4-5]针对这一方法进行了改进,以实现控制系统具备一定故障穿越能力和谐波抑制能力;为了减小海上平台的占地面积,提升变流器的效率和系统可靠性,文献[6-10]提出一种新型整流站,该类方法通过设计更小的滤波器,极大减小了变流站占地面积,并提升了系统的运行效率;文献[11]提出了一种新型电网形成控制,该控制方法采用全球定位系统GPS(global positioning system)向WT 变流器提供同步信号,从而有效提升了系统的稳定性;文献[12]提出了一种基于分布式锁相环PLL(phase-locked loop)的频率控制,该类控制方法属于分散控制架构,可将每个WT 作为一个电网形成变流器运行,而无需通信网络或GPS 信号,在故障条件下具有更好的性能,可实现对陆上电力系统的频率支持[13]。由此可见,已有研究成果主要存在以下三方面有待进一步改进:①在调节每台WT的有功输出时,均未考虑电压相角、电压幅值和频率间的耦合关系,造成系统频率偏差波动大;②控制方法大都依赖通信网络和GPS 信号,控制稳定性较差;③对限制故障电流和缓解系统共振方面缺乏深入研究。
基于此,本文提出了一种适用DR-HVDC 系统连接WT 的变流器电网形成控制方法。该方法通过调节WT 变换器的电压相角来调节每台WT 的有功输出。考虑到电压相角的变化如果没有配合适当调节电压幅值,会导致频率偏差的问题,本文通过设计每台WT 变流器中比例积分PI(proportionalintegral)调节器,可将这种频率偏差转化为电压幅值的变化,因此,所有WT 变换器都会同步改变其电压幅值。电压幅值的同步变化是本文所提控制方法与其他控制方法的重要区别,它避免了WTs 之间的无功功率波动。另外,所提控制方法还包括内环电流控制,可限制故障电流并缓解系统的高频谐振问题。
由此可见,与其他控制方法相比,本文的控制方法具有以下几个优点:①控制原理相对简单,需要调整的控制参数较少;②每台WT 具备独立控制其有功功率输出的能力;③不需要通信网络或GPS;④具有限制故障电流和缓解系统共振的能力。
1 风电场和风机模型
图1 为含DR-HVDC 系统的海上风电场示意。该系统基于文献[13-15]的模型,其由一个400 MW 功率的系统组成,通过基于DR 的HVDC 线路连接到陆上交流电网。陆上交流电网被建模为一个短路容量为8 000 MV·A、X/R 为15 的电网。陆上HVDC 端口由VSC 组成,VSC 控制其直流端口上的电压和注入陆上交流电网的无功功率。海上HVDC 端口(图1中标记为DR 平台)由两个(非受控、线路换向)串联的二极管12 脉冲整流器(DRs)组成,其交流侧上具有相应的无功功率补偿和滤波器组成。OWF 有50台WTs,单台容量为8 MW。WTs 采用连接至海上交流电网的全额定(4 型)电力电子变换器。WTs 在OWF中以6 根线布置,第一串由WTs 1-9 组成表示。第二串由WTs 10-18 组成,本文采用文献[16]中提出的方法聚合为等效72 MW WT 和相应电缆等效电路。同样,其他4 串WTs 19-50 聚合为等效256 MW WT 和相应的电缆等效π 电路。为了提高计算效率,本文不考虑每台WT 直流线路及其动态特性,故假设VSCs-直流电压恒定,且脉宽调制PWM(pulse width modulation)在线性范围内实现。

图1 海上风电场通过变流器连到HVDC 示意Fig.1 Schematic of offshore wind farm connected to HVDC via converters
本文将考虑开关效应和PWM 实施引起的任何延迟。平均值模型用于表示所有WT 变流器。图2为WT 与网侧变流器的原理,图中:vD为WT 电网侧变流器的直流电压;P 和Q 分别为WT 电网侧变流器的输出有功功率和无功功率;Lc和Cf分别为相电抗器和滤波母线电容器;三相电气参数(电流和电压)用粗体字母表示,v 为变流器内部电压矢量;i 为变流器电流矢量;u 为滤波器母线电压矢量。所提控制的主要目标是调节电压,使WTs 网侧变流器能够控制其有功功率,维持海上电网频率,并在整个风电场中实现无功功率平衡。
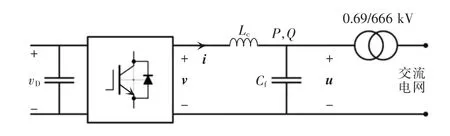
图2 WT 电网侧变流器及其交流元件的示意Fig.2 Schematic of grid-side WT converter and its AC components
2 控制模型描述
2.1 控制要求
WTs 的电网侧变流器连接到DR-OWF,作为电网形成变流器运行,可满足一些控制要求,如WTs有功功率和无功功率控制、海上交流电网控制的交流电压和频率。
2.2 控制系统概述
图3 为本文所提WTs 电网侧变流器的控制结构框图,其控制方法分为两层:外部控制层和内部控制层,其中,外部由有功功率、无功功率和海上电网频率的控制器组成。图中:Δω 为频率偏差;θ0和V0分别为变流器电压v 的初始参考矢量vd0+jva0的相角和幅值;Pref为WT 变流器有功功率P 的参考值;Qref为WT 变流器无功功率Q 的参考值;θmax和θmin分别为最大和最小相角;下标d、q 的变量为WT 变流器电气参数电流和电压的d、q 轴分量,下标ref 表示为该参数变量的参考值。
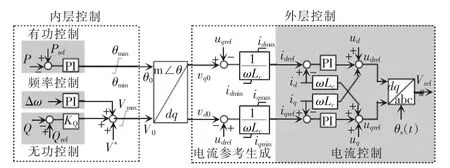
图3 针对DR 连接WT 变流器的控制方法框图Fig.3 Block diagram of control method for DR-connected WT converters
如图4 所示为锁相环PLL(phase locked loop)框图,它主要用于与滤波器母线电压u 同步。此外,该PLL 还估计了所提控制外层中使用的频率偏差,如图3 所示。

图4 用于DR 连接的并网WT 变流器dq 轴控制和同步的PLL 框图Fig.4 Block diagram of PLL used for dq-axis control and synchronization of DR-connected grid-formation WT converters
2.3 外控制层
本文控制方法的有功功率P 是通过调节变流器的电压相角θ0来控制,而由于DR 连接的OWF是一个无源网络,在不能满足电压幅度的情况下增加电压角会导致频率增加,而不会改变DR 变流器的交流侧到直流侧的有功功率。为了通过DR 变流器实现功率控制,同时保持功率角控制稳定,本文将频率偏差用于PI 调节器,来改变电压幅值V0,以保持海上电网频率在其标称值。故增加电压相角会导致电压幅值增加,从而增加有功功率。
在外部控制回路中,本文采用比例控制器通过WTs 网侧变流器调节风电场的无功功率。为防止在高有功发电条件下大量无功功率从WTs 流向海上变电站,以补偿DR 的低功率因数,海上变电站中已包括无源无功功率补偿。本文选择V*作为电网的标称电压幅值(单位为p.u.),其作用是在风电场不发电时,将WFs 的电压保持在标称值附近。
将V0和θ0转换为d、q 分量ud0=V0cos θ0和uq0=V0sin θ0,生成的初始电压参考矢量vd0+jvq0用于内部控制层。控制器电压和电流的空间矢量如图5所示。

图5 图3 所示电网形成控制下WT 电压和电流的空间矢量Fig.5 Space vectors of voltage and current of WT under grid-formation control shown in Fig.3
2.4 内控制层
电流控制器用于限制故障电流,并为高频谐振提供阻尼,但需使用外部控制层的输出作为内层控制器的参考值。故变流器相电抗器的稳态方程用于推导出电流参考矢量idref+jiqref,则有
式中:udref+juqref是滤波器母线电压的参考矢量,选择为1+j0 p.u.,这是因为在稳态运行下,滤波器母线电压的直接分量约为1 p.u.,其正交分量被PLL限制为0。
所提控制方法利用传统的内环电流控制方案来产生变流器的交流参考电压vref,如图3 所示。在PWM 中使用参考矢量来生成变流器的驱动信号。变流器的电压及其参考值可表示为v=eTdtvref,其中Td表示PWM 和测量过程的总延时,通常假设为Td=1.5/fs,其中fs是开关频率。
2.5 控制参数的边界
变流器电压的最低相位角选择为0°,即θ0=0,以防止反向有功功率流过WT 电网侧变流器(从交流到直流端子)。然而,在通电和启动条件下,WT可能会消耗交流电网的电能,最低相位角的选择有所不同。根据潮流方程调整最大相位角,有
式中,Kθ为最大功率偏差系数,Kθ=1。假定变流器和滤波器母线电压的幅值假定为1 p.u.,为了抑制暂态下有功功率的超调,防止故障时(当变流器有功输出无法达到Pref时)增加θ0,应将θmax设为θ0。假设允许10%的有功功率超调,因此,Kθ选择为1.1。
为了限制故障电流,必须限制dq 轴的参考电流分量。故障电流控制优先考虑无功电流,以便在扰动下保持OWF 无功功率平衡。只有通过WT 变流器注入有限的无功电流,才能实现可接受的故障穿越。因此,无功电流限值采用iqmax=-iqmin=0.25 p.u.,有功电流分量限制为idmin=0 和idmax=KidmaxPref,Kidmax=1.1。与电压相角的下限类似,idmin在通电和启动过程中可以具有不同的值。
2.6 所提控制的数学模型
如图1 所示,通过HVDC 线路的有功功率由其端口的直流电压差决定,可表示为
式中:Pon为从HVDC 线路流入陆上HVDC 变流器的有功功率;VD,on为陆上HVDC 端口直流电压,由陆上HVDC 变流器控制VD,off为海上HVDC 端口直流电压;RD为HVDC 线路电阻。二极管整流器交流侧的电压Vac,off可表示为
式中:T 为DR 变压器的匝数比;B 为串联在其直流端子上的(六脉冲)二极管电桥的数量;Xt为DR 变压器的漏抗;ID为流过HVDC 线路的直流电流,可表示为
将式(4)和式(5)代入式(3),可得流向陆上的有功功率为
式中,K1和K2为常数参数。假设陆上HVDC 变流器将VD,on保持在一个固定值,可以表示[13]为
从式(7)可看出,为了控制从DR-HVDC 连接OWF 到陆上电网的有功功率,必须调节海上交流电网的交流电压幅值,这是由WT 电网侧变流器制定。
由于此类OWF 由许多并网WT 组成,没有高功率并网HVDC 变换器,因此,此类WT 可能会引起相互振荡。为此,除了控制有功潮流外,另一个控制目标是确保多个并联并网WT 变换器的稳定运行。这两个目标必须通过控制WT 电网侧变流器端子处交流电压的相角和幅值来实现。如果可同步改变这样的电压幅值,则WT 变换器之间发生振荡(尤其是无功功率振荡)的风险将降低。为此,本文提出了一种基于频率偏差的电压幅值控制方法。由于频率是通用参数,所有变换器都能平等地看到其偏差,因此,它们的电压幅值可以同时改变。
但是,频率变化必须由有功功率控制回路启动。由于频率是电压相位角的导数,因此,本文采用经典功率角控制可以满足所需的频率变化。为了从数学上呈现上述控制原理,假设任何功率失配通过PI 控制器转化为WT 转换器交流电压的相位角偏差Δθ0,即
WT 变换器的有功功率方程为
式中:Xc=ωLc;V 和U 分别为变流器电压和滤波器母线电压的幅值;θv和θu分别为变流器电压和滤波器母线电压的相位角。滤波器电抗Lc通常很小,以至于其终端的相角差相当小,则sin(θv-θu)≈θvθu。在这种假设下,滤波器母线电压的相位角偏差Δθu可从式(9)中获得为
式中,V0和U0为相应电压的稳态值,且Δθv=Δθu。频率偏差由锁定到滤波器总线电压的PLL 估计。PLL中PI 调节器的输入量为dq 坐标系下交流电压的q轴分量,可通过Park 变换计算为
式中:θs为由PLL 生成的变换/参考角;θs(t)=ω0t+Δθs;θu(t)=ω0t+Δθu,其中ω0是额定角速度/频率。PLL 锁定滤波器的母线电压,若假设θu(t)和θs(t)之间的差值非常小,有sin(θu-θs)≈θu(t)-θs(t)=Δθu-Δθs。因此,考虑式(10)并忽略电压幅值变化,则式(11)中的uq可以表示为
频率偏差Δω 由PLL 通过PI 调节器估算为Δω=PIpll(s)uq。参考角度偏差Δθs也由PLL 通过频率偏差的积分产生,即
“从原始人类起,人类就向往获得自由,为了获得自由不惜以生命、社会和以文明的灭亡为代价,把个人的自由作为生存权利最高的精神目标追求。”[27]体育是人性的规章,当代的健康体育,规范人们追求身体肌肉的增长方式,杜绝把化学制品当主食,以伤害身体机能为代价,追求身体外在的肌肉美感。文明体育,规范着场域的秩序,以公平为原则,拒绝以卑劣的手段赢得比赛,或是功利性的比赛形式。体育在人类文明中从过去走向未来,从区域走向世界,从风俗习惯走向文化,使人类走向永远的自由,促进人的全面发展。
这意味着只要控制系统中存在有功功率不平衡,频率偏差就会存在。另一方面,如式(9)所示,可以通过控制交流电压大小来控制有功功率。因此,根据式(9)和式(13),通过频率偏差调节电压幅值为
根据式(9)、式(13)和式(14)得到图6 所示的采用所提控制的直流输电接入OWF 的有功功率控制框图。假设电流控制回路的闭环带宽为αc,且海上电缆对电压幅值的影响可以忽略不计。因此,变流器电压V 和海上变电站电压Vac,off的标称值相同。

图6 采用所提控制的直流输电接入OWF 的有功功率控制框图Fig.6 Block diagram of active power control for OWF connected with DC power transmission using the proposed control
2.7 与其他控制方案的比较
已有DR 连接OWF 的并网控制方法中,通过调节滤波器母线电压u 来控制有功和无功功率以及频率。换句话说,其外部控制回路的输出是馈送至滤波器总线电压控制器的参考值。不同的是,在本文提出的控制方法中,外部控制回路的输出是变流器电压v 的参考值。因此,不需要额外的调节器来控制滤波器母线电压,从而形成具有低阶动态的简单控制系统。
与文献[3]中的控制方案相比,本文所提控制系统是集中式的,仅使用本地测量,因此不需要高速通信网络,而且控制器如海上电站电容器组的电容设置均不直接取决于系统组件参数。海上频率在文献[3]和[8]中是按比例控制,而在本文所提控制中是由PI 调节器控制,这消除了稳态运行下的频率误差。另外,本文设计的电流控制和锁相环结构与文献[3]和[8]相同,但采用了不同的参考电流形成方式,即其是在外层控制层中实现的。
3 仿真分析与验证
本文在PSCAD 中对所提控制方法进行了仿真验证。OWF 的示意如图1 所示。为了验证所提控制方法的性能,对其在不同运行场景下的反应和可行性进行了评估。运行场景包括海上交流电网中的三相短路、WTs 的有功功率变化、风电场无功功率控制中的扰动以及风机停运等。所有控制设置和系统参数如下:测量有功功率、无功功率和交流电压幅值的时间常数为10 ms,WT 电网侧变流器的控制参数设置如表1 所示。
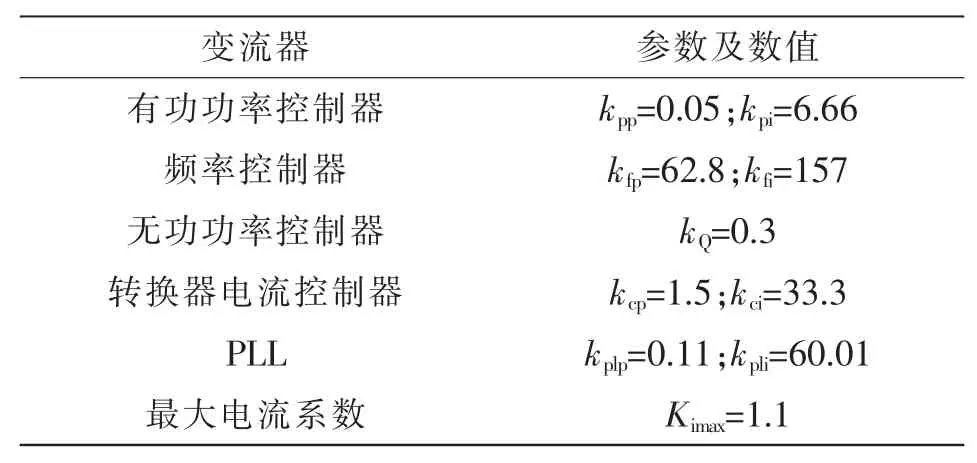
表1 WT 电网侧变流器控制参数Tab.1 Control parameters of grid-side WT converter
一对输出电缆与PSCAD 中的频率相关(相位)模型选项一起使用。电缆的长度为200 km,缆芯电阻为1.72×10-8Ωm。电缆采用集总T 型,电感为4.0×10-5H/km,电阻为0.01 Ω/km,电容为0.030 4 μF/m。每两个WTs 之间的距离为1 km,从海上变电站到每个串中第一个WTs 的距离都为2 km。本文使用的无源滤波器、无功功率组、变压器和DR 变流器组成的所有组件的参数详见文献[14-15]。图1 中的DR 平台由无源滤波器、2 个三绕组变压器、4 个六脉冲二极管整流器和2 个直流电抗器组成。
所有WT 的电压和无功功率的设定值分别选择为1 和0 p.u.。每个WT 变流器的功率和交流电压的基本值分别为8 MV·A 和0.69 kV(变流器的额定电压)。
3.1 66 kV 母线处的三相短路
为了评估所提控制的故障穿越能力,仿真实验在海上变电站的66 kV 母线上施加100 ms 的三相短路,仿真结果如图7~图9 所示。HVDC 两端的直流线路电压以及海上交流电压的瞬时值和有效值如图7 所示,WTs 有功功率和无功功率如图8 所示,变流器电流如图9 所示。
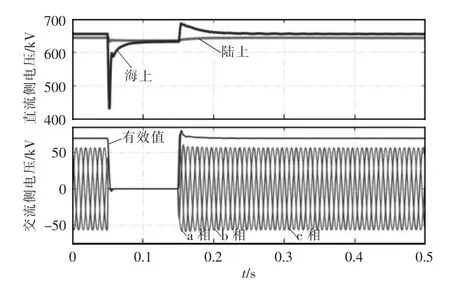
图7 在66 kV 母线短路情况下HVDC 线路的直流电压和DR 平台的交流电压Fig.7 DC voltage of HVDC link and AC voltage of DR platform under short circuit at 66 kV bus
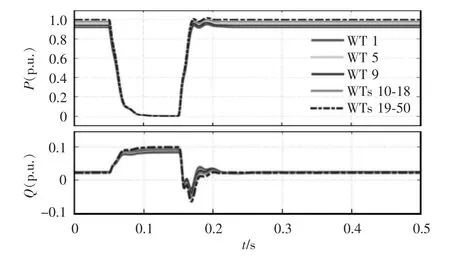
图8 66 kV 母线短路时WTs 的有功和无功功率Fig.8 Active and reactive power of WTs under short circuit at 66 kV bus
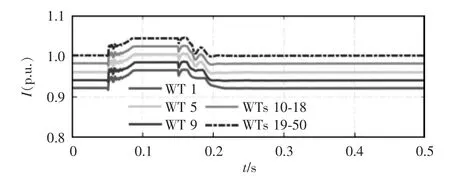
图9 66 kV 母线短路时变流器的电流大小Fig.9 Current magnitude of converters under short circuit at 66 kV bus
对于较低的电流控制带宽,即200 Hz,在这种短路事件下观察到变流器电流的一些尖峰。当HVDC 线路上严重短路时对海上交流电网的影响与66 kV 母线上的三相短路相同。
3.2 有功功率输出的变化
风电场的有功功率可能会因风速的变化而改变。然而,无论其他WT 的发电量如何,每个WT 必须能够独立调节其有功发电量。为了验证独立有功功率变化的能力,采用所提控制方法,在不同的时间将阶跃变化应用于WTs 的有功功率设定点。通常,有功功率斜坡率限制WTs 有功功率的变化速度。在该案例中有功功率斜坡率被有意选择为高,即4 p.u./s,以查看所提控制器的性能。在此案例,DR 平台中的无功功率补偿保持不变,假设WTs 负责平衡海上电网中的无功功率,并且假设有足够的空气动力,以便WTs 在增加其设定值后能够以其标称功率运行。
仿真结果如图10 和图11 所示。在不影响其他WTs 输出的情况下独立改变WTs 的有功功率。然而,所有WT 的无功功率变化几乎相等,以补偿DR变流器的功率因数。当大多数WTs 发生有功功率变化时,无功功率变化更为显著。这是因为DRs 的功率因数补偿需要更多的无功功率。
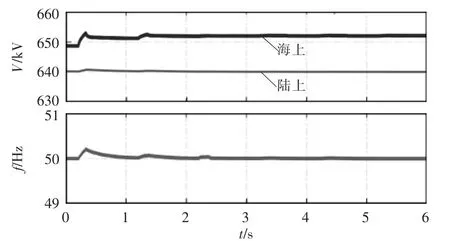
图10 HVDC 输电线路的直流电压和海上频率在施加到WTs 有功功率的阶跃变化Fig.10 DC voltage of HVDC link,and offshore frequency under step changes applied to active power of WTs
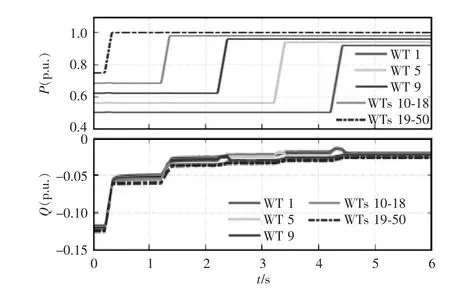
图11 有功和无功功率在阶跃变化下用于WTs 有功功率Fig.11 Active and reactive power under step changes applied to active power of WTs
如图10 所示,当有功功率变化显著时,海上频率变化较大。但是,由于频率控制回路中有PI 控制器,因此,它会恢复到其标称值。有功功率变化越大,海上频率变化越大。
3.3 DR 平台无功补偿装置停运
在DR 连接的OWF 中,无功功率流不独立于有功功率流。通过DR 变流器的更高有功功率流也需要更高的无功功率流。然而,为了在减少损耗优化OWF 运行,DR 变流器所需的无功功率在海上平台上就地提供,以防止大量电流流过电缆和WTs设备。为了显示WTs 对无功功率扰动的反应,并证明WTs 能够在此类情况下继续运行并产生所需功率,假设DR 平台上的一个无源滤波器跳闸。跳闸滤波器补偿65 Mvar 电容性无功功率。WTs 会立即对无功功率不足作出反应,并在不对有功功率生产造成重大干扰的情况下重新实现平衡。此场景的仿真结果如图12 和图13 所示。WTs 几乎立即对扰动作出反应,并增加其无功功率。WTs 的有功功率输出以及海上电压没有受到显著影响。然而,图12 所示的海上频率略有变化,且在合理的短时间内恢复。

图12 DR 平台上的一个无功功率补偿器跳闸时平台的有效电压和海上频率Fig.12 RMS voltage of DR platform and offshore frequency when one reactive power compensator on DR platform trips

图13 DR 平台上的一个无功功率补偿器跳闸时的有功和无功功率Fig.13 Active and reactive power when one reactive power compensator on DR platform trips
3.4 风机停运
OWF 中可能发生的另一种情况是WTs 停运。如果出于任何原因,部分WTs 跳闸,其余WTs 必须能够继续运行并产生其参考有功功率。为了分析该场景,假设包含9 个WT(编号为10-18)突然与DR平台断开连接。从仿真结果中可以观察到其他WT在有功功率输出、维持海上频率和实现风电场无功功率平衡方面的反应,如图14 和15 所示。如图14所示,在可忽略瞬态的情况下剩余WT 的有功功率输出不受影响,然而,为了保持风电场的无功功率平衡,WTs 立即作出反应,修改其无功功率。交流电压和海上频率如图15 所示。
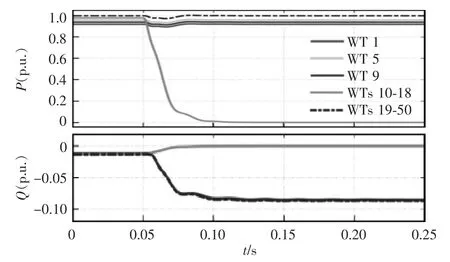
图14 当一组WTs 跳闸时有功和无功功率Fig.14 Active and reactive power when a set of WTs trip
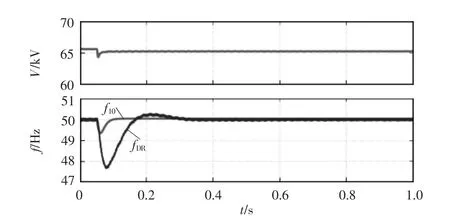
图15 DR 平台的海上交流电压和频率以及WTs 10-18 的集总模型Fig.15 Offshore AC voltage and frequency of DR platform,and lumped model of WTs 10-18
海上交流电压在事件发生后下降,因为DR 传导的有功功率比事件发生前少。海上电网和跳闸WTs 的频率在可接受的范围内,经历了不显著的瞬态。跳闸WTs 电流的dq 分量如图16 所示。

图16 WTs 10-18 集总模型的内部电流Fig.16 Internal current of lumped model of WTs 10-18
4 结语
本文针对DR 连接的海上风电场中的风机变流器,提出了一种电网形成控制方法。控制器通过调节变流器的电压角启动有功功率控制,从而导致频率偏差。该偏差用于调节转换器的交流电压幅值,从而调节DR 交流侧电压的幅值,并通过DR实现功率流控制。风电场的频率控制是使用每个风机的PI 调节器建立的,与其他控制器相比,控制方法具有结构简单、动态性小的特点。仿真结果表明,所提控制器能够限制故障电流,独立地改变变流器的有功功率,对风电场的无功扰动做出满意的反应,并在严重的意外情况下继续运行。
猜你喜欢
电子制作(2018年17期)2018-09-28 01:56:44
电子制作(2017年7期)2017-06-05 09:36:13
电测与仪表(2016年8期)2016-04-15 00:30:16
电测与仪表(2016年15期)2016-04-12 00:30:52
通信电源技术(2016年4期)2016-04-04 02:57:38
通信电源技术(2016年4期)2016-04-04 02:57:12
电源技术(2015年5期)2015-08-22 11:18:30
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2015年7期)2015-04-09 11:40:10
风能(2015年9期)2015-02-27 10:15:25