基于NX运动控制器的三维太空环监控系统设计
2024-02-21 03:49侯芮彬徐世许肖克宫志强
机械制造与自动化 2024年1期
侯芮彬,徐世许,肖克,宫志强
(青岛大学 自动化学院,山东 青岛 266071)
0 引言
现在三维太空环在科技体验馆和游乐场所中得到普遍使用。常见的三维太空环不具备数据记录功能,不能实时记录和显示设备的运行数据,导致设备运行情况不明。实物见图1,设备结构如图2所示。

图1 三维太空环
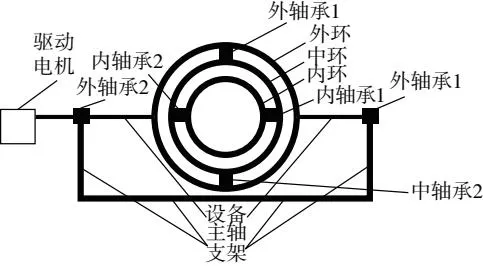
图2 设备结构
本文所研究的三维太空环监控系统将保证设备运行中速度控制精度高,调速范围广,运转过程平稳,提供了超速等多种报警提示,大大提高了设备运行的可靠性和安全性。工作人员可以通过触摸屏,根据游客的承受能力随时修改运行速度和运行时间,操作方便灵活,实现了人机交互的功能[1]。
1 监控系统总体设计
监控系统包括运动控制系统和上位机监视系统两部分。
1.1 运动控制系统需求分析
控制面板由触摸屏、启动按钮、停止按钮等组成,实现设备启停、手动/自动模式选择等操作并设置有声光报警,实现在出现故障时自动报警功能。本系统拥有信息显示功能,如实时速度、正转次数和反转次数等,同时能够在触摸屏上对设备的运行速度、运行时间等参数进行调节,以适应不同游客体验。控制系统硬件结构如图3所示。
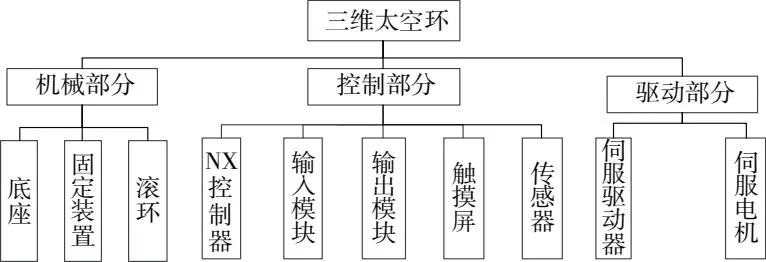
图3 三维太空环硬件结构
1.2 上位机监视系统需求分析
三维太空环运行时,上位机实时从控制器获取参数。在三维太空环设备开机时,监视系统可以自动从控制器获取需要的实时数据并从上位机中获取到具体时间,然后存储到数据库[2]。系统支持以折线图形式显示实时数据,提高数据的可视化,同时用户可以在网页端进行数据查询、删除等操作[3]。
1.3 通信协议
EtherCAT运行原理如图4所示,主站可以向从站发送和接收报文,这种数据传送方式大大提高了传输效率,提高了数据利用率。系统中EtherCAT通信网络主要用于NX运动控制器和伺服驱动器之间的通信,其中NX运动控制器当作主站,伺服驱动器当作从站。
FINS协议的会话有一次请求帧,请求帧中附带着发起方的节点参数。运动控制器端会确认并将自己的节点参数返回给请求方。由FINS Header、FINS Command Code和FINS Command Data组成,详细结构如图5和图6所示。

图5 FINS指令帧结构

图6 FINS响应帧结构
1.4 关键技术问题
在系统通信方面,由于在现场需要触摸屏实时控制,因此采用EtherNet/IP通信协议实现触摸屏和运动控制器通信。因为上位机监视系统的功能包括从控制器中采集数据,本系统利用FINS通信方式实现了上位机与控制器通信。因为FINS通信是以EtherNet/IP为基础,所以可以通过EtherNet/IP线缆相连。具体通信流程如图7所示。
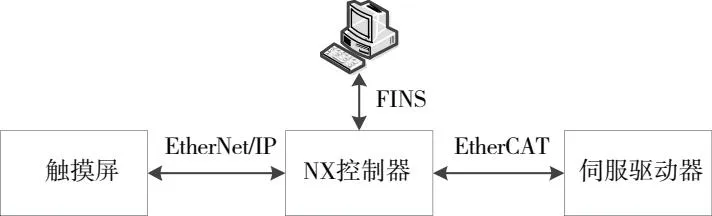
图7 监控系统通信流程
在运动控制方面为保证系统安全可靠,要求三维太空环运行速度不能太快,必须在后台限制速度最大值。由于设备运行时惯性太大,容易导致设备超速,必须监控设备实时速度。本系统中选择速度控制+逻辑控制策略控制设备运行,而且编写了各部分运动控制程序。
2 运动控制策略
速度控制是指以指定速度连续移动轴的功能。速度控制过程中,如果多重启动其他运动控制指令后发生中断,则达到目标速度后切换动作[4];逻辑控制是指经过程序判断当前选择的运行模式和是否满足其他运行条件,来决定设备如何运行。
在MC功能模块中指定目标位置,以达到将伺服驱动器指定为位置控制模式的目标速度。MC功能模块依靠指令的分析结果按一定周期执行运动运算,生成针对位置接口单元(脉冲输出单元)的指令值,生成的指令值为目标位置、目标速度。将生成的指令值当作脉冲串输出至伺服驱动器,伺服驱动器根据脉冲串的指令值执行位置环控制、速度环控制。速度控制分析如图8所示。
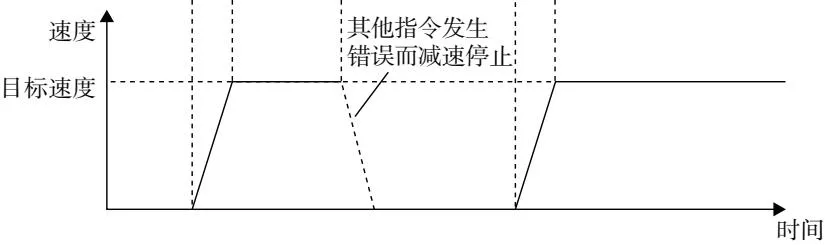
图8 速度控制分析
2.1 NX运动控制器通信配置
本系统采用NX102自带的以太网端口实现控制器、上位机和触摸屏之间的有效通信,选择EtherNet/IP协议实现控制器和触摸屏通信,选择FINS协议实现上位机和控制器通信,利用1根网线就能够很简单地进行通信[5]。
2.2 控制系统软件设计
主程序选择使用常用的顺序控制,从三维太空环设备的控制要求方面考虑,控制系统程序主要包括手动程序、自动程序、报警输出程序等设计。
手动程序主要实现了正转点动、反转点动和回原点3个功能。
自动模式能让设备连续自动旋转,简化工作人员工作量,在自动模式中,设备能按照工作人员设置的运行速度、运行时间、总时间、准备时间等参数运行。
超速报警能保证三维太空环安全运行,当判断圈数是否匹配时,实际圈数通过安装在设备原点的接近传感器所得,每转1圈会接收1次信号,电机圈数通过电机所转的角度得到。圈数差或者速度差大于设定值后,设备报警。报警输出部分程序如图9所示。
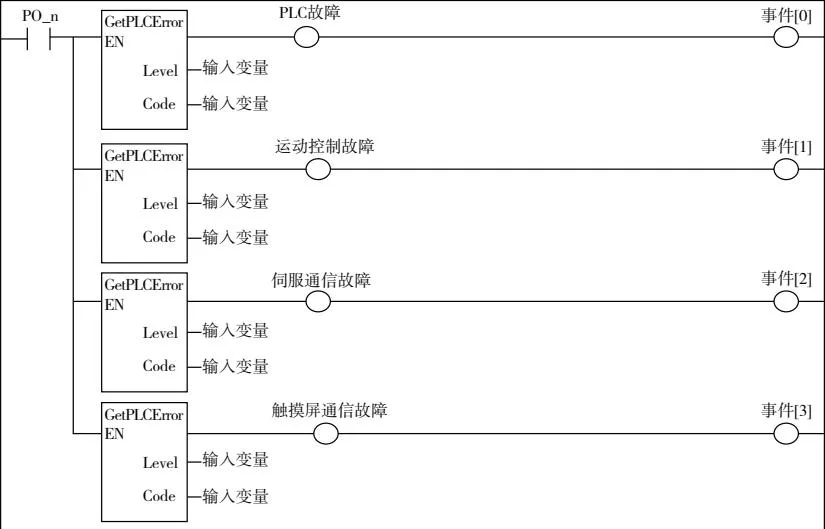
图9 报警输出程序
本系统中可以直接通过功能块获取运行时间、运行速度等需要传输的变量值,而通过功能块获取的转矩值变化复杂,并且变化范围大,因此需要做一定的处理,再将值传输到触摸屏显示,以便观察转矩变化,处理后的转矩为
(1)
式中:Trq,rea为显示的处理后的转矩值;Trq为通过功能块获取的实际转矩值;19Nm为伺服电机额定转矩,除以100是求其百分比。
3 上位机监视系统设计
由于设备的运行数据是通过监测伺服电机的运行数据所得并存储在控制器中,因此上位机从控制器中采集数据。上位机监视系统中设计了相应数据库,以便实现运行数据的存储、删除、查询、分析等功能[6]。
3.1 运动控制器数据采集
上位机监视系统和存储数据的运动控制器之间使用FINS/TCP协议实现数据交互,上位机监视系统和运动控制器直接连接在同一局域网,从运动控制器中采集数据,然后把数据存储在数据库并传输给上位机。通过FINS指令编程实现运动控制器与上位机的数据交互方法经过了连接、断开连接、获取状态、写入和读取5步。
3.2 数据库配置
在配置服务器后建立了相应的运行数据表,本系统数据库表存储的数据包括游客姓名和设备的实时速度、实时转矩、旋转方向、运行时间等,游客姓名是工作人员在网页上输入之后存储到数据库,运行数据是上位机从控制器中采集获得。
3.3 上位机程序设计
软件程序架构可以决定系统程序的主体结构、宏观特性以及拥有的基本功能,因此,本系统按照具体要求采用了3层架构,加快了开发进度,提高了程序合理性。
用户登录时需要完成用户名与密码的校对,用户每次进入上位机监视系统时会被要求填写密码。
在网页端实现了对数据的查询操作,查询是上位机监视系统的关键功能。查询结果从设定的查询时间的第一条记录数据开始显示,查询完成后会显示相关数据,并且可以导出数据保存在计算机上。
4 系统测试结果
在上位机打开数据库,查询设备运行数据表,执行结果如图10所示,由此可以看出设备启动瞬间上位机监视系统便采集了1次数据,以后每隔1 s采集1次数据。

图10 三维太空环运行数据表
上位机监视系统获取到设备运行数据并生成折线图,得到图11—图13所示的速度和转矩分析图。通过图中的转矩变化折线图可以得到每个时刻游客受到的冲击力大小,其中转矩来回波动的情况是三维太空环上下旋转引起的。由折线图可以看出,二维、三维交替旋转和三维旋转运转时的转矩要比二维旋转时的转矩要大,说明游客受到的冲击力在二维、三维交替和三维旋转比二维旋转更大,体验感更强。
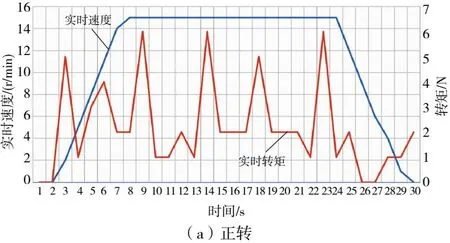
图11 二维旋转速度和转矩分析
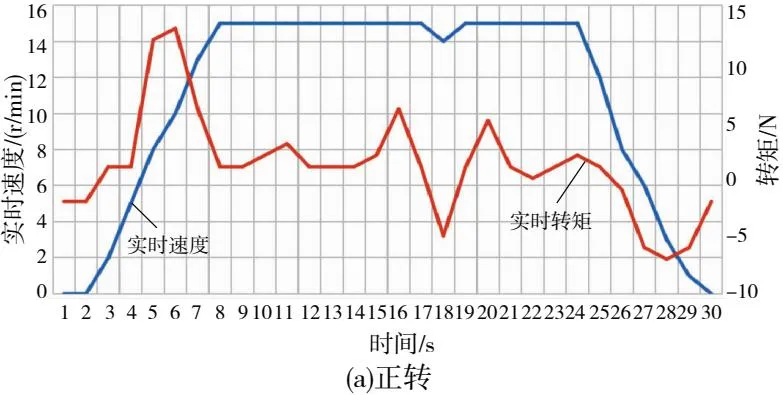
图12 二维三维交替旋转速度和转矩分析
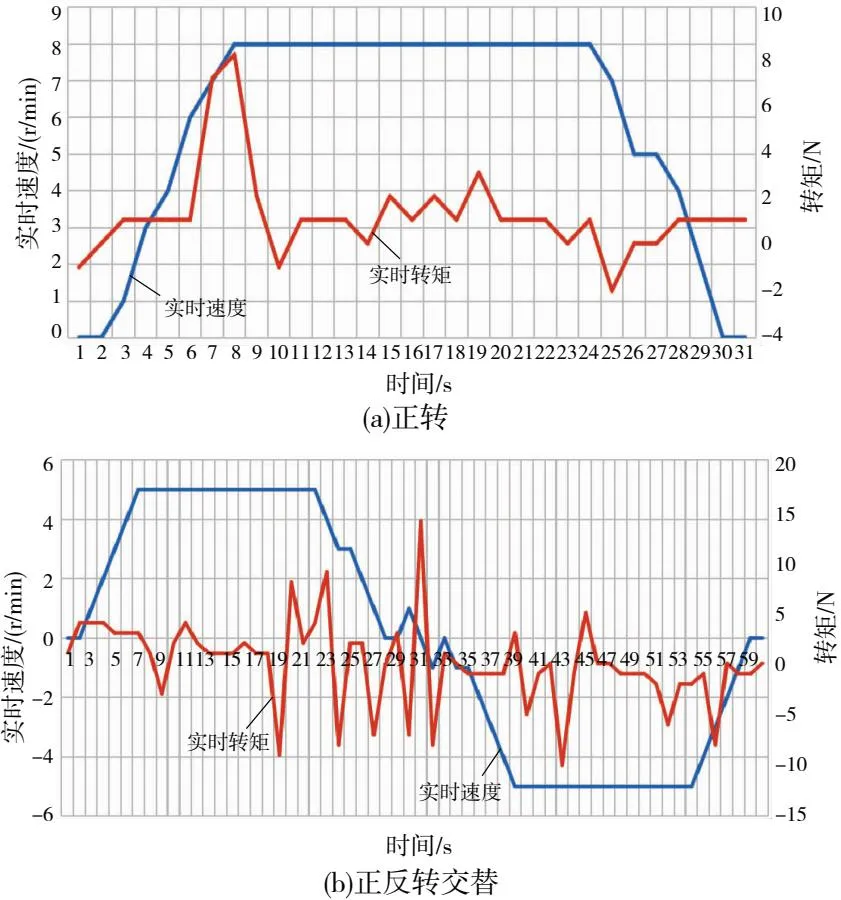
图13 三维旋转速度和转矩分析
由图11—图13可以看出,在运动控制器、伺服电机和伺服驱动器的配合下,设备在进入匀速状态后能够平稳地运行,上位机监视系统也能够正常采集和显示相应数据,从而得出三维太空环监控系统能够正常运行的结论。
5 结语
本文研究了三维太空环监控系统,根据三维太空环的结构特点、运行情况,对硬件要求和软件要求进行分析,完成了对设备运行参数的实时控制和监测。在此基础上,为了精准控制,采用了基于速度控制+逻辑控制的策略,确保了速度的快速、精确控制。
猜你喜欢
趣味(数学)(2020年12期)2020-06-09
电子测试(2018年14期)2018-09-26
四川冶金(2018年1期)2018-09-25
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
通信电源技术(2016年1期)2016-04-16
学习月刊(2015年3期)2015-07-09
汽车零部件(2015年8期)2015-06-23
电机与控制应用(2015年3期)2015-03-01