基于贝叶斯算法的网球运动员发球动作识别模型
2024-02-21 06:48张亮
湖北科技学院学报 2024年1期
张 亮
(安徽中医药大学 体育部,安徽 合肥 230012)
网球运动起源于12世纪中叶的法国,在19世纪末传入我国。近年来,网球运动得到了快速的发展,在世界范围内风靡,成为世界级项目。网球运动经过多年的发展,发生了很大的变化,其击打方式演进过程为:手击打→板击打→拍击打,球拍材质演进过程为:木料材质→高科技碳纤维材料[1]。除此之外,网球运动的打法与竞技战术也产生了极大的演进。发球是网球运动中最关键动作之一,标志着选手对抗的开始。发球动作特征主要表现在两方面,一方面是发球由一方掌控,不受对手的限制;另一方面发球速度、角度、旋转以及落点均是决定是否得分的关键因素,成为赢得胜利的基础。在网球比赛过程中,每一分的产生都必须经过发球动作,由于发球具有一定的主动权,故选手更容易在发球局得分取胜[2]。
由于网球运动的不断发展,其对发球训练的科学性与实效性提出了更高的要求,发球是网球比赛中得分的起点,要想赢得比赛,主要通过发球局取胜,由此可见,发球动作的重要性。因此相关学者对网球运动员发球动作识别做出了研究。文献[3]提出基于“Go/NoGo”任务范式的乒乓球发球动作识别模型,通过3D模拟击球部位的信息结构,识别正确动作并按键做出反应,识别错误动作不按键。该方法的识别正确率较高,但识别耗时较长;文献[4]提出基于三维图像分析的网球运动员发球动作识别模型,从运动生物力学角度分析发球动作参数,分析每次发球动作的异同,构建识别模型。该方法的识别耗时较短,但识别正确率较差。
针对上述问题,构建基于贝叶斯算法的网球运动员发球动作识别模型。贝叶斯算法是一种统计学方法,具备算法简单、分类准确率高、速度快等优势。锻炼网球运动员发球动作,构建网球运动员发球动作识别模型,通过模型识别发球动作的相关运动学参数。通过构建模型为网球运动发球科学训练以及日常教学提供一定的理论依据。
一、网球运动员发球动作识别模型构建
1.发球动作结构及特征分析
为了精确的识别网球运动员发球动作,首先需要分析发球动作的结构与特征,具体发球动作分析过程如下所示。
依据动作结构原理可知,任何技术动作均是由一系列不同的简单动作组合而成。为了方便发球动作的解释,将身体看作一个动力链。发球动作动力链即开始于脚的反作用力,结束于快速挥拍击球的动作过程。
依据动力链原理,将发球动作划分为六个阶段,具体如表1所示。
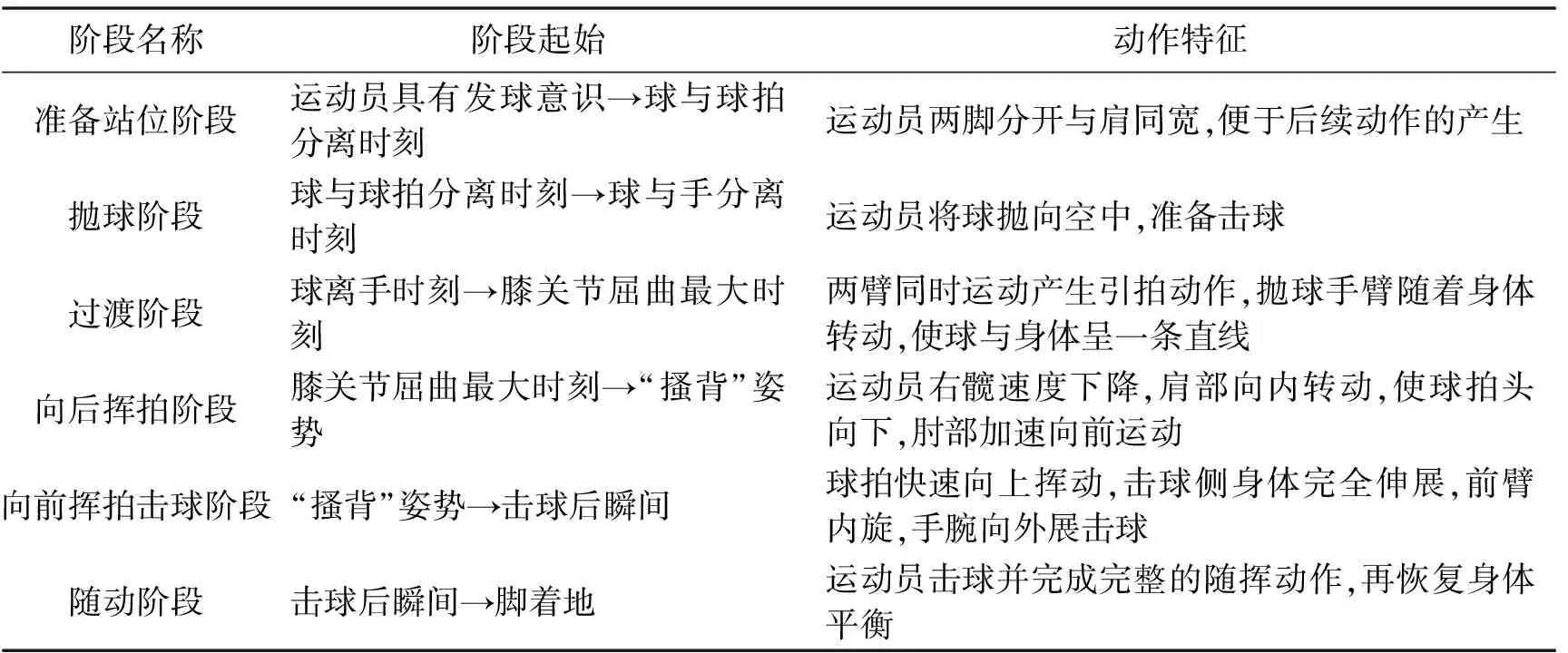
表1 发球动作阶段结构表
网球运动员发球动作每个阶段身体重心的变化速度存在着较大的不同,这也是发球动作的关键特征之一[5]。经过现有文献可知,发球动作不同阶段身体重心线速度特征如表2所示。
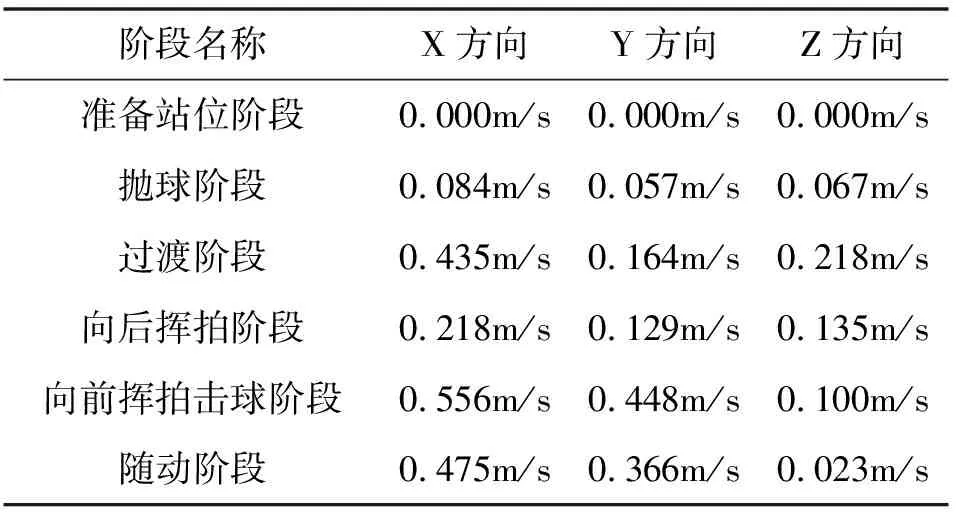
表2 发球动作不同阶段身体重心线速度特征表
上述过程完成了发球动作结构及特征的分析,为最终网球运动员发球动作识别做准备。
2.发球动作图像获取与处理
此研究选取包含CCD传感器与CMOS传感器的彩色摄像机采集网球运动员发球动作图像。该摄像机可以同时获取发球动作的彩色图像、深度图像与骨骼图像[6]。
其中,彩色图像与深度图像以数据流形式传输。彩色图像分辨率为640*480,帧数为30Fps,格式为Bayer格式,彩色数据可以编码为RGB-32bit。深度图像获取过程与彩色图像一致,有效位置信息为高13位,用户ID信息为低3位。骨骼图像由深度图像数据获取,包含20个关节点的三维坐标,通过可视化显示网球运动员的骨骼图[7]。
为了方便发球动作图像的应用,分析彩色图像、深度图像与骨骼图像的空间坐标关系[8]。彩色空间、深度空间与骨骼空间坐标系如图1所示。
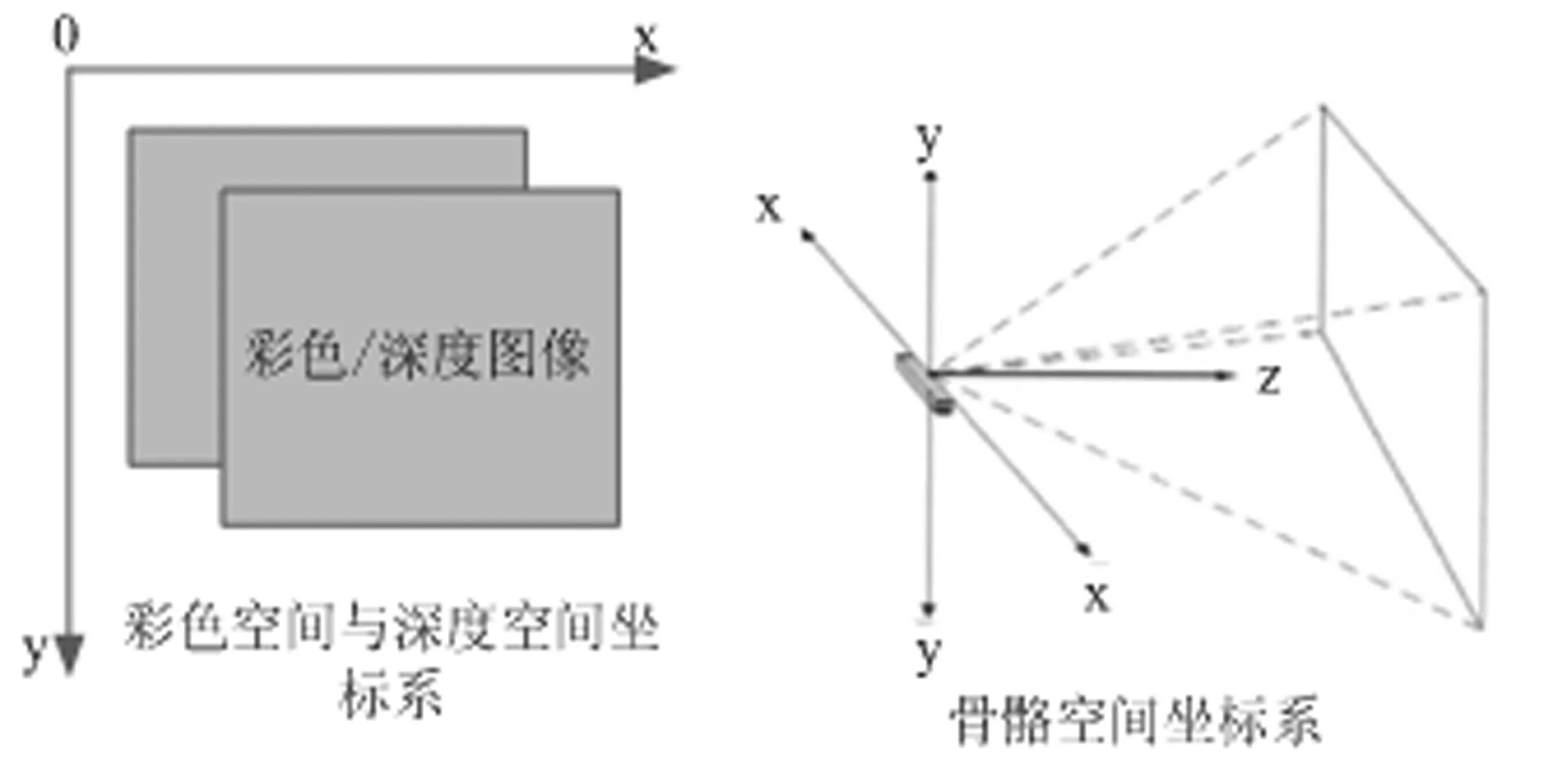
图1 彩色空间、深度空间与骨骼空间坐标系示意图
设置彩色空间像素坐标为(x(t),y(t),z(t)),深度空间像素坐标为(xs(t),ys(t),zs(t)),骨骼空间像素坐标为(xd(t),yd(t),zd(t))。
骨骼空间与深度空间坐标系转换公式为
(1)
式(1)中,a表示的是摄像机的水平方向视角,取值为57°;b表示的是摄像机的垂直方向视角,取值为43°。
深度空间与彩色空间坐标系转换公式为
(2)
式(2)中,△d表示的是摄像机的位移。
通过上述过程,将发球动作彩色图像、深度图像与骨骼图像变换到同一坐标系中,由于z方向信息含量较少,为了方便图像处理,忽略z方向信息,将得到的发球动作图像即为I(x,y),为下述发球动作特征提取提供图像数据[9]。
3.发球动作特征提取
以上述获得的发球动作图像I(x,y)为基础,采用FV算法提取发球动作特征,为发球动作识别提供依据。
对于发球动作图像来说,从中提取T个描述符(特征),每个描述符维度为D,则可以采用G={gt,t=1,2,…,T}来描述网球运动员发球动作特征[10]。假设T个描述符独立同分布,则存在
(3)
式(3)中,p表示的是概率密度函数;λ表示的是参数。
对公式(3)取对数,得到
(4)
采用一组高斯分布的线性组合模型逼近公式(4)的分布,模型表示为
式(5)中,K表示的是模型中线性组合的个数;wi表示的是自由变量;pi表示的是第i个高斯分布;ui表示的是描述符的参量。
通过公式(5)定义网球运动员发球动作特征,其概率表示为
(6)
由公式(6)可以看出,FV算法提取的发球动作特征不但包含发球动作的原始特征,还包含了一些结构性信息,对发球动作特征描述更加细致[11]。
4.贝叶斯分类器设计
贝叶斯分类器是网球运动员发球动作识别的关键,为此,依据贝叶斯算法设计分类器[12]。
贝叶斯分类器以条件独立性假设为前提条件,依据贝叶斯算法设计的一种分类方法。对于训练样本集,首先计算出训练集中输入与输出的联合概率分布函数,以此为基础,运用贝叶斯算法计算输入数据对应的最大后验概率输出[13]。

对于输入值x,计算其先验概率与条件概率,计算公式如下
(7)
式(7)中,Y=ck表示的是输入空间对应的输出空间;N表示的是训练数据集的数量;P(X(j)=ajl|Y=ck)表示的是联合概率分布函数。
对于给定的输入x,对应的输出空间表示为
(8)
依据公式(8)确定输入x的类别,确定公式表示为
(9)
利用贝叶斯估计条件概率,估计结果为
(10)
式(10)中,Sj表示的是特征值的总数量。
以公式(10)为依据,得到后验概率最大化的分类器,其表达式为
f(x)=arg maxP(Y=ck/X=x)
(11)
上述过程完成了贝叶斯分类器的设计,为网球运动员发球动作识别提供坚实的支撑[14]。
5.网球运动员发球动作识别
依据上述贝叶斯分类器的设计,构建网球运动员发球动作识别模型,构建模型示意图如图2所示。
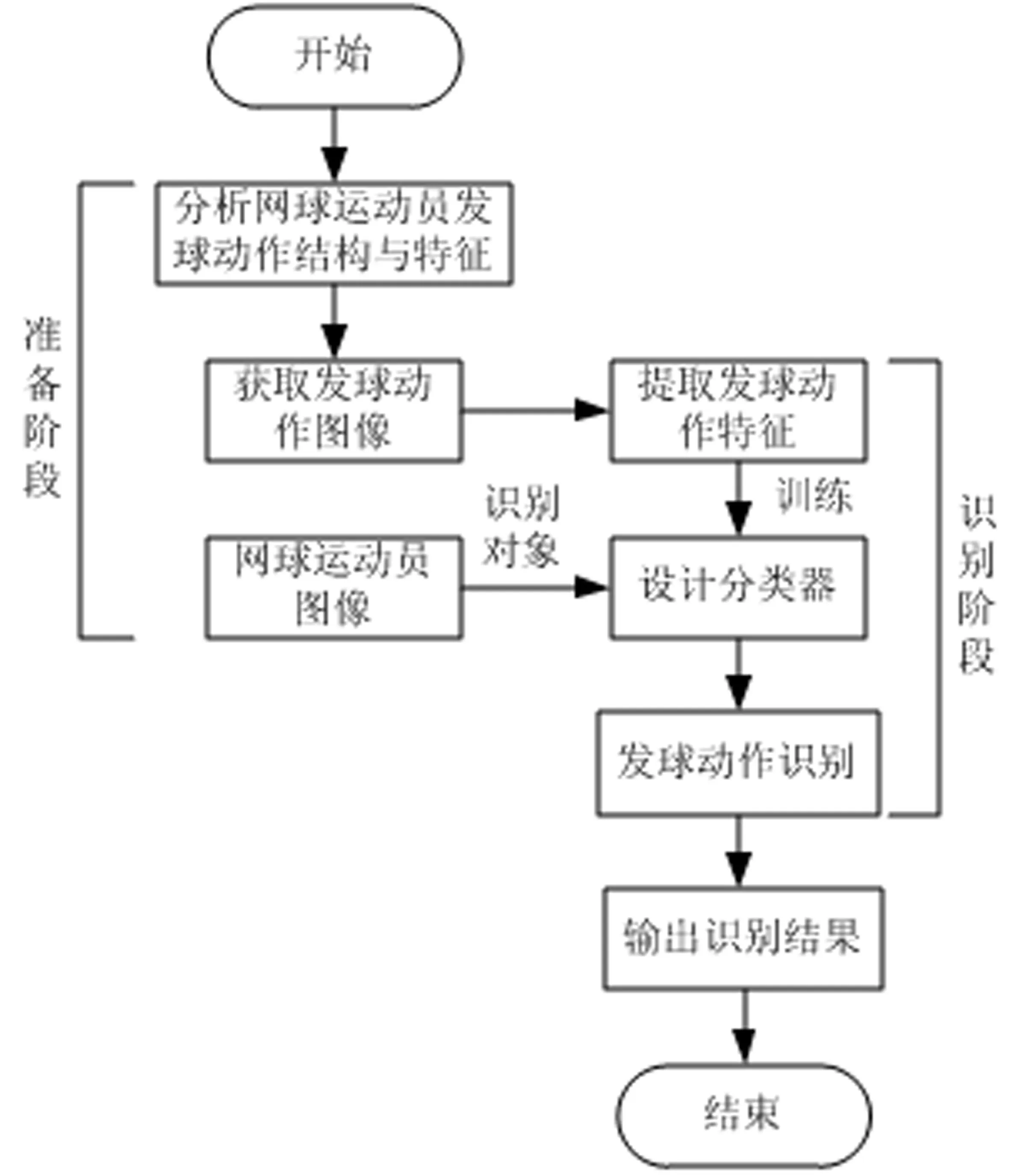
图2 网球运动员发球动作识别模型示意图
依据图2模型即可实现网球运动员发球动作的识别。贝叶斯算法具备算法简单、分类准确率高、速度快等优势,由于贝叶斯算法的运用,极大的提升了分类器的准确率与速率,构建模型可以既快速又准确地识别网球运动员发球动作,为网球运动员训练以及发球技术的提升提供大量的数据支撑,同时也为网球运动的发展推波助澜[15]。
二、仿真实验与结果分析
1.实验设备及对象
实验主要采用的设备为图像获取设备,将网球发球的短暂性与快速性,实验采用短时间采集存储记录系统实现实验图像的获取与存储,其由摄像机、采集卡、线缆、计算机以及采集软件构成,摄像机参数情况如表3所示。
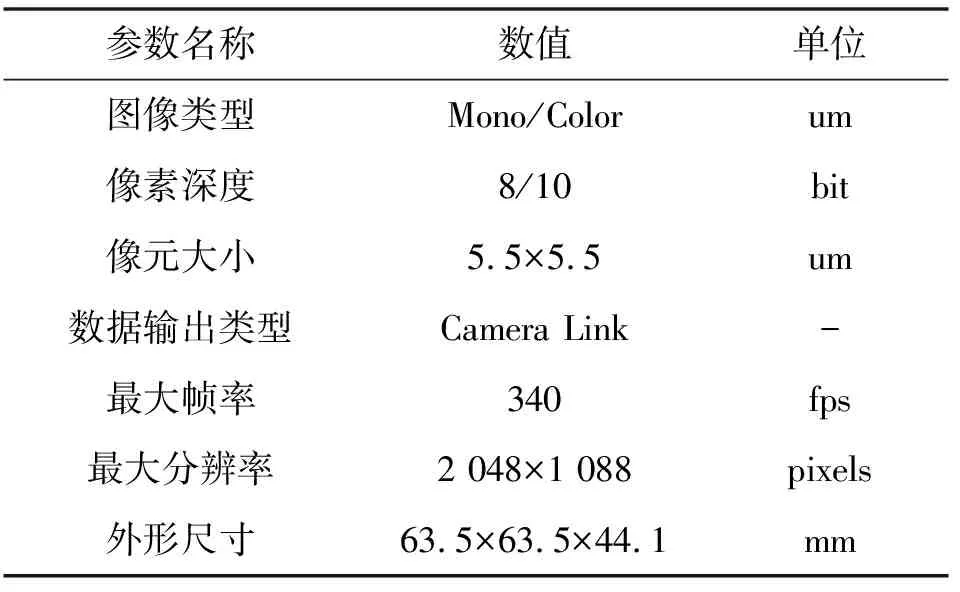
表3 摄像机参数表
选择120名网球运动员作为实验对象,均以右手持拍、无伤病史、熟悉杀球技术和动作要领、动作流畅且舒展,且运动员等级水平均为5.5级别,能够代表相同层次、相同水平等级的网球运动员发球技术特征。对远动员的发球姿势动作取240组,采用所提方法、文献[1]方法、文献[2]方法对比运动员发球姿势动作的识别精度。实验对象人体特征如表4所示。
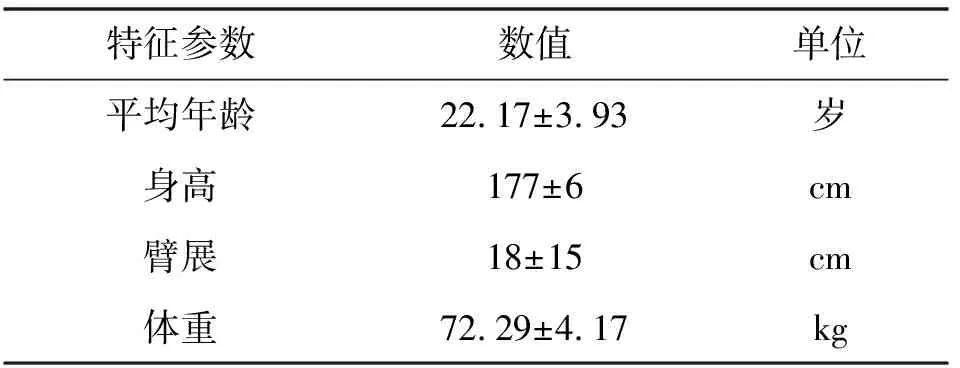
表4 实验对象人体特征表
2.实验数据采集
在仿真实验过程中,将摄像机放置于实验对象的右侧,具体摆放位置如图3所示。
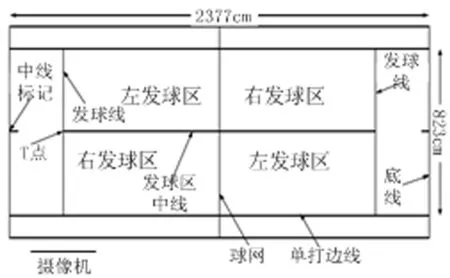
图3 摄像机摆放位置示意图
在实验过程中,标记每个运动员的发球手臂关节点,通过多次实验对比,设置标记颜色为红色,其对运动员发球无影响,具体如图4所示。

图4 发球手臂标记点示意图
采用摄像机获取实验对象发球动作图像,同时对其进行去噪、腐蚀与膨胀操作,为实验结果分析提供可靠的数据支撑。
3.实验结果分析
为了反映构建模型的性能,选取发球动作识别准确率系数及识别耗时指标,常规情况下,发球动作识别准确率系数越大,表明发球动作识别准确率越高,识别耗时越短,发球动作的识别速度越快,构建模型的识别性能越佳。以文献[3]方法及文献[4]方法作为对比实验方法,通过上节得到实验数据统计结果如图5所示。
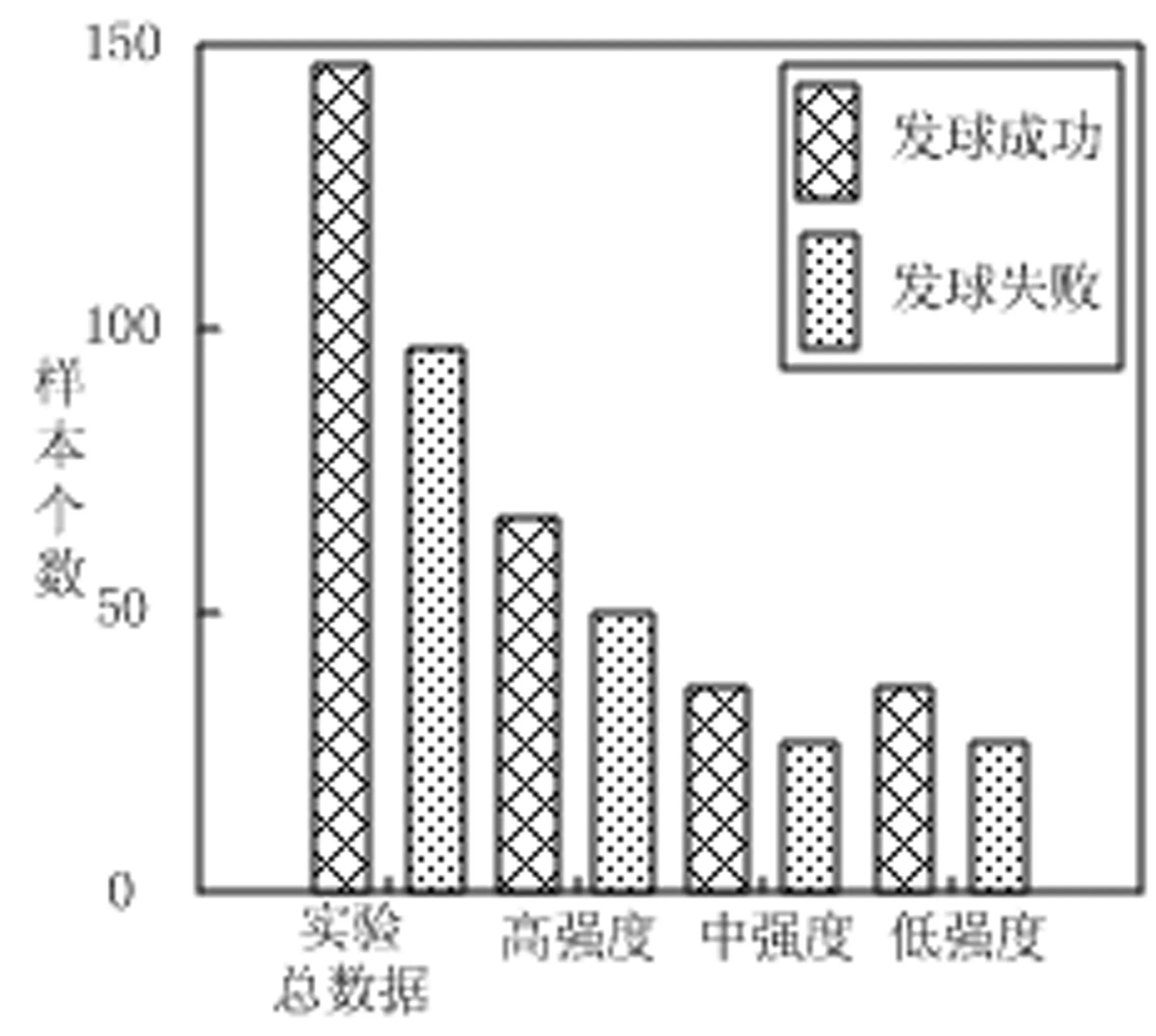
图5 实验数据统计图
如图5所示,该实验共采集了240组发球动作数据样本,其中发球成功样本为145组,发球失败样本为95组。
将上述实验数据输入到构建模型中,计算发球动作识别准确率系数,具体如表5所示。
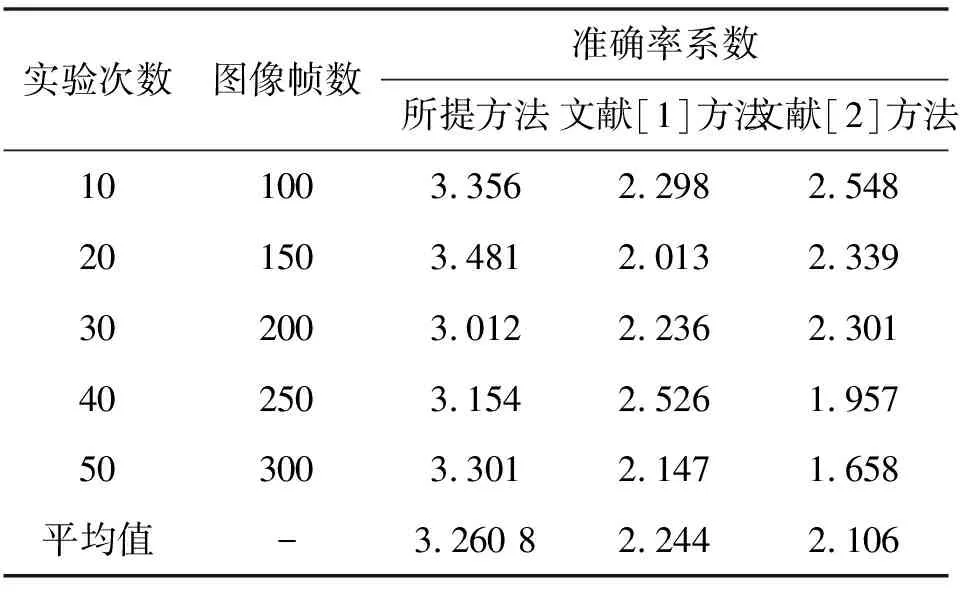
表5 发球动作识别准确率系数数据表
如表5数据显示,文献[1]方法的识别准确率系数平均值为2.244,文献[2]方法的识别准确率系数平均值为2.106,而构建模型发球动作识别准确率系数平均值为3.260 8,远远高于现有模型水平。
比较三种方法对145组发球成功样本的发球动作识别耗时,得到对比结果如图6所示:
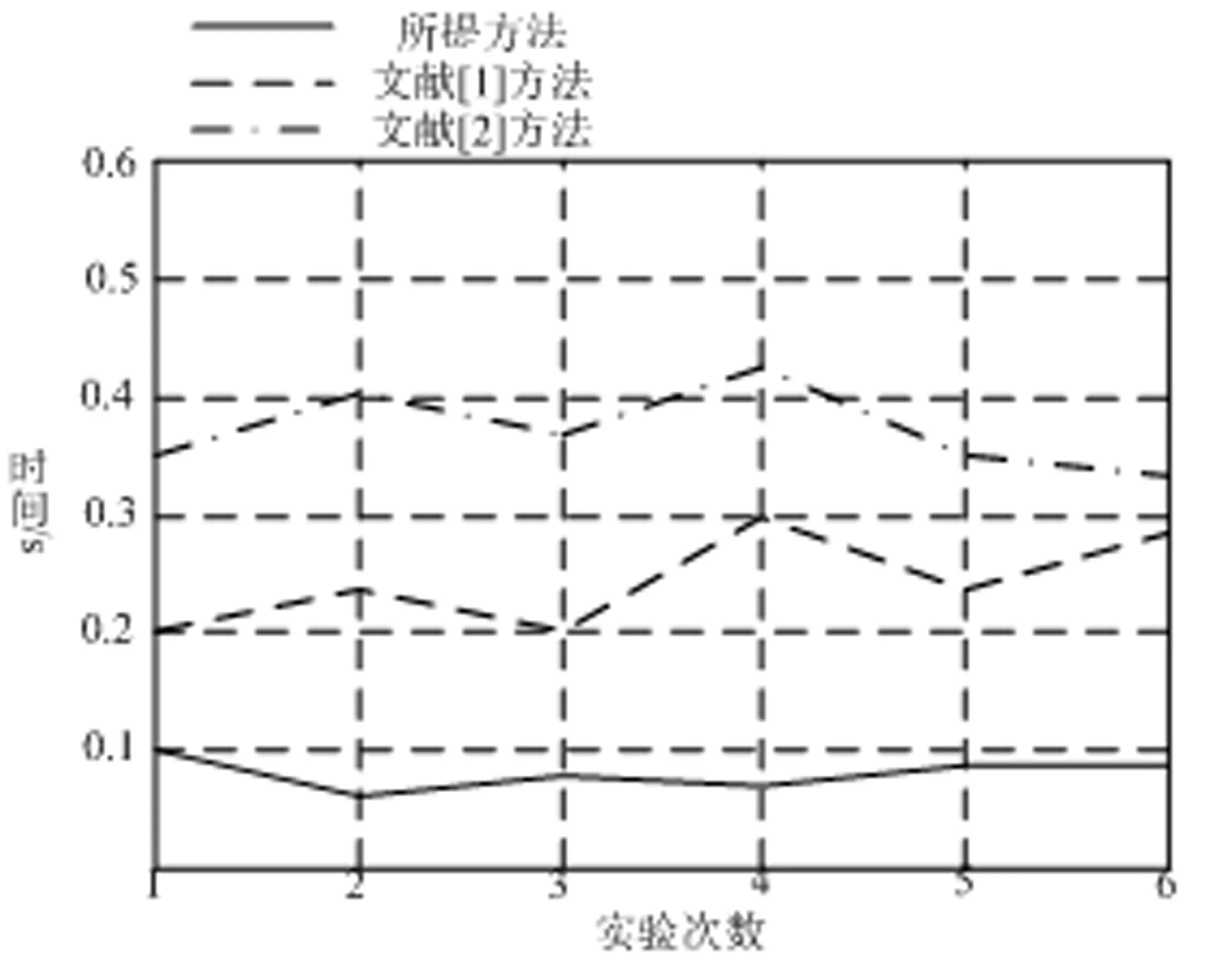
图6 发球动作识别耗时
如图6所示,文献[1]方法对每次发球的识别耗时平均为0.25s,文献[2]方法对每次发球的识别耗时平均为0.39s,而所提方法对每次发球的识别耗时平均为0.08s。由此可见,所提方法对网球运动员发球动作识别速度快,识别准确率系高,充分表明构建模型具备较好的识别性能。
三、结语
由于网球运动的不断发展,其对发球训练的科学性与实效性提出了更高的要求,为提升网球运动员发球动作正确率,本文提出基于贝叶斯算法的网球运动员发球动作识别模型研究。将贝叶斯算法引入到网球运动员发球动作识别中,依据贝叶斯算法设计了分类器,极大地提升了模型的识别准确率与效率,为网球运动员训练以及发球技能提升提供了有效的手段,并为网球运动的发展贡献自己的一份力量。
猜你喜欢
运动精品(2021年6期)2021-10-25
文体用品与科技(2021年2期)2021-02-04
疯狂英语·初中天地(2020年9期)2020-10-28
基层中医药(2020年12期)2020-07-22
数理化解题研究(2017年4期)2017-05-04
运动(2016年7期)2016-12-01
铁道通信信号(2016年6期)2016-06-01
电子器件(2015年5期)2015-12-29
郑州大学学报(理学版)(2014年2期)2014-03-01
文体用品与科技(2013年8期)2013-08-15