基于D2D技术的V2V中断模式的信息传输机制
2024-02-20 01:24孙鉴肖增辉孙潇张中山
科学技术与工程 2024年2期
孙鉴, 肖增辉, 孙潇, 张中山
( 1.山东理工大学计算机科学与技术学院, 淄博 255000; 2.北京理工大学信息与电子学院, 北京 100081)
目前,在移动互联网与物联网结合的5G网络中,“万物互联”时代正在成为现实,尤其是随着无线通信和汽车技术的进步,人们对于智能交通系统(intelligent transportation system,ITS)的研究也迈上了一个新的台阶,引起了研究人员的极大兴趣和关注。
车联网技术(vehicular ad hoc networks,VANET)作为ITS中很重要的组成部分,也迅速发展起来[1]。VANETs是一种新型无线网络——车载无线通信,主要是在专用短距离通信(dedicated short-range communication,DSRC)频段上,满足道路安全消息和控制的极短延迟要求[2]。VANETs就是通过信息采集与处理、无线通信与组网、数据路由与分发等技术,实现车到车(vehicle-to-vehicle,V2V)、车到人(vehicle-to-pedestrian,V2P)、车到基础设施(vehicle-to-infrastructure,V2I)、车到网络(vehicle-to-network,V2N)以及车到云端(vehicle-to-cloud,V2C)之间的信息感知与交互,为车辆及驾驶者提供更为安全高效的服务[3]。
目前的车联网架构面临的主要问题包括有限的移动性支持、健壮性、有限的带宽、可靠性和延迟等。与传统的无线移动终端相比,车联网的网络终端移动性高,路况信息复杂且对安全性与实时性提出了较高的要求。假设车辆以120 km/h的速度行驶,制动延时10 ms,汽车将多开行0.3 m,而如果延时缩减到1 ms,距离将缩减到3 cm,这样将大大降低事故的发生概率。
在车联网领域,研究的关注点主要集中在降低信息的传播延迟[4]、构建网络的体系架构[5]、物理层中的信道估计[6]以及媒体访问控制(medium access control,MAC)层中的信道预测[7]等。文献[8]中假设一个子蜂窝用户的频谱资源只复用给一个端到端(device-to-device,D2D)车队,且考虑小尺度衰落的影响,得到了准确的信道状态信息(channel state information,CSI),对车联网无线资源的优化分配以及蜂窝系统的性能影响进行了研究。文献[5]中,利用DSRC和长期演进(long term evolution,LTE)各自的优点,提出了一种异构车载网络的接入方式,并提出了一种提高异构车载网络效率的新方法——载波监听多路访问(carrier sense multiple acces carrier sense multiple accesss,CSMA)与时分多址(time division multiple access,TDMA)相互避让的原则。
目前,车联网架构主要基于802.11p标准的点对点(ad hoc)通信以及基于LTE蜂窝标准的后端通信[9-10]。802.11p系统主要是针对移动性为零或非常低时,对WLAN类型的环境进行优化,由于网络拓扑的快速变化而引起连接中断和信号拥塞,可能会导致VANET崩溃,尤其在高峰时段[11]。此外,在完全自组网中频谱资源的利用率很低[12],且随着接入车辆的增加,广播风暴的发生频率更高。文献[13]针对高速公路的车联网场景,分析了特定路段上任意两车之间的连通性模型参数指标与车辆密度及传输距离之间关系,且提出了一种车联网专用的报文格式,能够有效地控制广播报文的泛滥情形。但是对于传统的蜂窝系统,包必须由演进节点(eNB)转发,因此传统的LTE不支持V2V通信。D2D技术是距离较近的两个终端直接进行通信,而不通过基站转发,因此可以大大地降低延迟,提高可靠性以及频谱效率。
文献[14]针对多信道车联网的数据传输需求,提出了一种 V2R/V2V 协作通信的数据传输调度算法。根据车辆的请求构建初始调度冲突图,在此基础上,结合 V2R/V2V 协作传输的方式分时完成调度,有效地改善了网络服务容量。文献[15]针对车联网中车辆节点服务质量(quality of service,QoS)的不同需求,提出了一种基于应用优先级与吞吐量评估的按需驱动的多路径传输控制协议(multipath transport control protocol,MPTCP)拥塞控制算法,保证了车联网通信的安全性,并通过吞吐量评估的方式提高了网络传输效率,提高了高优先级应用的网络传输实时性。
由于车辆具有高移动性和有限的移动范围,为了支持车联网中不断增长的业务量,提高交通效率,文献[16]提出了一种基于非正交多址接入技术的簇重叠区域性能改进方案,能有效地降低相邻两个簇间冲突的概率和传输延迟。文献[17]中,针对D2D通信的集群内传输资源,设计了一种车辆聚类算法,提高簇内资源效率,消除簇内干扰;通过分析VANET中的无线业务,提出一种资源利用率优化的协同通信方案,以最大限度地提高簇内频谱效率,显著提高了吞吐量。文献[18]考虑了基于D2D的车载用户自主可靠地复用蜂窝车载用户资源的新场景,并对用户进行合理的选择,以确定车对车链路和车对基础设施链路的资源分配,提出一种启发式算法来处理接入模式选择和资源管理问题,通过考虑链路的可靠性,在保证D2D车载通信服务质量的同时,最大化整个系统的和传输速率;针对移动性引起的信道状态信息难以获取的问题,提出基于大尺度慢衰落和小尺度快速衰落统计特性信道模型实现功率控制和频谱共享的频谱资源管理模型。
在车联网中车辆的高速移动性,提高数据传输的实时性与可靠性尤为重要。在车联网中,只有距离较近的车辆之间才会产生影响,而D2D通信也是距离较近的两个终端之间建立连接,D2D通信在提高频谱利用率以及减低时延方面具有得天独厚的优势,两者之间具有相似性[19]。现针对车联网的连接性分析,将D2D技术的通信模式引入车联网中进行消息传输,降低空口传输时延以及网络转发时延,且采用有效的传输机制避免网络堵塞。在车辆的覆盖范围内联合完全自组网与混合车联网两种通信模式,提出一种中断模式的信息传输机制,只有当车辆的行驶状态发生改变时才向其他车辆发送信息,同时为了避免车辆之间通信链路断开或者已经处于保护圈外部,需要每隔一定时间向其他车辆发送一个信息来确认保护圈内车辆之间的链路是否通畅。该机制利用车辆的相对移动来触发信息发送,降低发送信息的频率,并因此减少链路之间的干扰。同时,信令开销也得到了降低,系统的信道容量得以提高,从而增加车辆的连接数目。
1 车联网系统模型分析
D2D通信的信息传输分为分布式(完全自组网)与集中式(基站辅助)两种方式,如图1所示。分布式通信方式是D2D终端之间自主完成D2D链路的建立和维持,如图1中的D3与D4所示,该方式可以容易获取D2D终端之间的链路信息,但相应地增加了设备的复杂度;而集中式通信方式则由基站根据获取的所有链路信息,决定是否建立D2D链路,如图1中D1与D2之间的D2D链路在基站控制下进行数据传输,该方式便于资源分配和干扰管理,可以充分发挥出D2D通信的技术优势,但增加了信令开销。
基于D2D通信的车联网也可以分为自组车联网与混合车联网两种方式。在无基础设施支持的场景下可以自组车联网,每个节点(车辆)之间自主地协调并选择节点建立直接连接,也可以作为中继节点为其他车辆转发数据,如图2所示。随着相邻节点距离、信号强度等参数改变,可以实时调整节点之间的路由关系,该架构正好可以满足车辆移动场景中节点移动性快,组网速度快、修复能力强的需求,还能避免中心节点出故障全网瘫痪的问题。在路边基础设施——路侧单元(roadside unit,RSU)比较完备时,基于D2D通信的车联网架构也可以通过基础设施扩展车车之间的通信,使其接入互联网,从而为每个车辆提供无处不在的网络接入、实时安全消息、多媒体业务、辅助控制等,如图2所示。
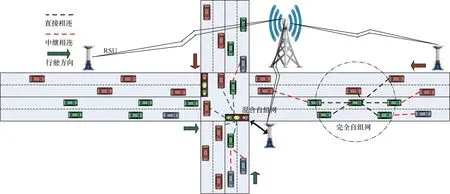
图2 车联网模型示意图Fig.2 Schematic diagram of internet of vehicles model
车联网与传统D2D网络最大的区别就是车辆的分布局限性与移动性,对应着车流量分布与车速分布模型。在车流量建模过程中,最初的车流量可以用静态的分布模型来表示,然后配合速度模型来表示。
在单车道中采用泊松分布来简化分析,当车流量密度为ρ辆/m时,长度为x的路段上有k辆车的概率为
(1)
在车辆在行驶过程中往往不是匀速运动,但也并不是每时每刻都会发生变化,因此做如下的假设:在车辆的初始位置固定后,除非车辆接收到RSU的指挥信号或者遇到突发情况,在一个周期T内的行驶状态是固定的。
车辆i的速度函数可以表示为
vi=vi0+δΔvi
(2)
式(2)中:vi为t时刻的瞬时速度;vi0为给定的初始速度;Δvi为速度的随机变化量;δ为速度变化系数,表达式为
(3)
式(3)中:Ti为车辆行驶状态发生变化的周期,无特殊情况时车辆的行驶速度在一个周期内是恒定的,速度变化仅仅发生在周期初始点(末点);n为变化周期的倍数。如果遇到突发情况,则速度会发生突变,往往都是急速减速。
该速度模型如图3所示,车辆i在0时刻进入覆盖范围,以速度v5行驶,第一个与第二个行驶周期速度没有变化,第三个周期内速度提高到v6,以此类推。特别注意的是T4周期内遇到突发情况车辆急刹车,然后缓慢加速到v4。
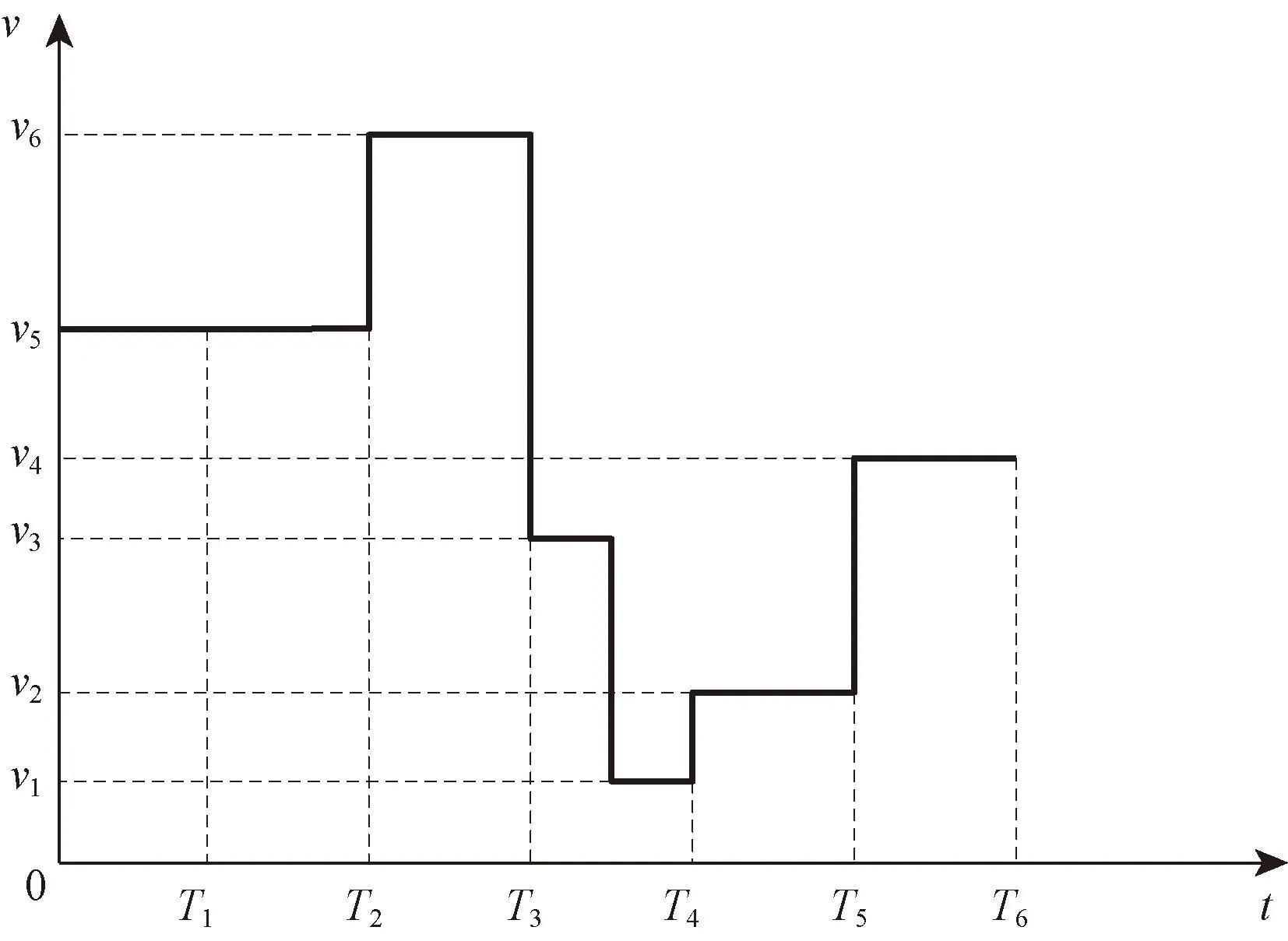
图3 速度模型图Fig.3 Speed model diagram
2 通信模式
在该系统模型下,根据有无RSU辅助的两种车联网情况分别讨论。
2.1 无RSU的自组车联网
在无路边基础设施的自组车联网中,车辆之间的干扰主要是来自周围车辆,车辆j接收到信干噪比(signal-to-interference-plus-noise ratio,SINR)可以写为
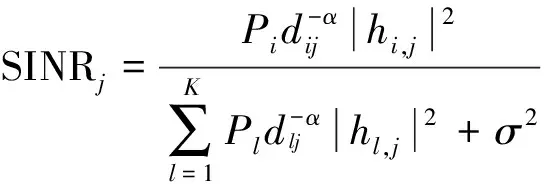
(4)

从式(4)可以看出:车辆j接收到的信干噪比存在一个极小值(预先规定的阈值βj),即满足SINRj≥βj才可以建立链路,即
(5)
可以发现:发射车辆i的覆盖区域存在一个最大的发射范围,超出该区域则发射信号无法传递到车辆j,则车辆i与j之间无法建立通信链路。
为了保证车联网的连接性需求,最好是所有车辆之间均建立连接进行数据传输,但是从上文分析可知:①对于车辆节点来讲,由于受到发射功率的限制,都存在一个发送信息的最大范围;②在车辆在其覆盖范围内,与其他车辆建立的链路之间相互存在干扰;③随着周围车辆增加,覆盖范围内链路之间的干扰越大,则该覆盖范围相应地随之减小。
由于车辆的行驶速度较大,往往还需要考虑中继模式,即在覆盖范围外,车辆之间的信息传输可以采用解码转发中继模式。本文研究仅考虑二跳中继场景,其两个阶段的SINR表达式分别为
(6)

2.2 RSU辅助的混合车联网
混合车联网在市区车流量较大时,尤其是在十字路口时可以通过RSU预先给一定范围内的车辆发信息,可以减少自组网中车辆之间的信息交流引起网络阻塞;同时在高速或者部分乡道车流量较少时,利用RSU可以解决通信距离有限以及信道质量不稳定而导致链路频繁断开的问题。如果RSU与车辆复用同一频谱资源,会造成额外干扰,则接受车辆j接收到的SINR表达式可以写成
(7)

在行驶过程中,车辆的行驶状态、速度以及路径是时刻变化的,因此处于辐射范围内的车辆并不是一成不变的,当车辆驶出该区域时,则由直接链路变成中继链路,直至距离较远而没有必要建立连接。由于RSU引入的额外干扰,发射车辆的覆盖范围会进一步减小。范围以外的车辆通过中继模式与RSU建立连接,类似地,SINR表达式可以写为
(8)
由于车辆在行驶过程中,行驶参数变化较快,导致数据发送信息频繁。由于发送数据时信息量越大或者越频繁,其占用的时隙资源越多,则越容易造成网络堵塞,可能导致一些关键信息无法上传,而发生意外。
3 信息传输机制
3.1 传输机制
在车联网中,每隔一定的时间间隔发送全部数据信息会造成信息冗余,导致传输时间较长,占用频谱资源几率大,链路之间干扰变大。在该机制中,提出一种中断模式,即在信息传输的步骤中,若车辆的行驶状态不发生变化,只需在固定时刻上报一个确认信息0000验证链路正常即可;在其他时间,只有当状态发生改变时才进行信息传输,能够在确保车辆行驶安全的前提下大大地节省网络资源。当车辆行驶发生变化或者遇到意外情况,需要及时地传递给其他车辆,如:当车辆发现有障碍物时,需要及时提醒其他车辆;将车辆的行驶状态(包括速度、变道等)提前预告给其他车辆,从而能够提前预判;靠近交叉路口时,提醒其他车辆指挥信号和行人信息;路况以及事故汇报等。因此在信息传输时只需传递变化的参数即可,如此可以大大地降低车辆之间传递的信息量,从而有效地降低干扰,且保证关键参数能够及时传递给其他车辆。
车辆与覆盖范围内的其他车辆建立D2D链路,并建立路由表,如表1所示。假定车辆V的发送信息为S,发送的信息主要包括车辆的行驶参数,如速度、路径、路况与预警等。
3.2 信息格式
信息格式包含帧头、标志位、数据、帧尾。数据部分包含的车辆的行驶参数。由于车辆行驶状态发生改变时,并不是所有的参数同时改变,可能只有一个参数发生变化,而其他的数值仍然是0,如果每次都同时发送所有的参数数据,首先信息传输时延比较长,且占有频谱资源的时间较长,导致链路之间的干扰会加大,容易造成车辆链路断开;其次,传输数据量大,容易造成网络堵塞。
为了避免每次都发送所有信息,在该机制中数据包含参数位(前两位)与数值位(后两位)两部分,其中参数位为00时表示无变化,01、02、03、…依次表示位置、速度、方向等。
车辆j向车辆i只发送行驶参数发生变化的信息,车辆i接收到后更新路由表信息;若车辆j的行驶参数不发生改变则无需上报其信息,则车辆i的路由表保持不变,但是在固定间隔内也必须发送一个无变化标识,以确保与该车辆的连接正常,车辆i收到无变化标识时路由表也维持不变。车辆行驶状态发生改变时只发送相应变化的参数及数据,如果同时几个参数发生改变时,则依次发送。利用本文提出的信息格式能够大大地降低数据长度,降低时延与链路干扰。
车辆在行驶过程中位置是实时变化的,但在车联网中更关心是两个车辆的相对位置,因此这里的位置指的是在行驶过程中的车辆之间相对位置;预警信息是车辆下一步将要采取的加速超车、变道改径、刹车减速或停车等行为,可以将其提前通知其他车辆,让其他车辆预知其运动状态或轨迹,并根据自己的状态提前避让或者反馈无法避让信息。

表1 车辆的行驶信息路由表及数据格式信息Table 1 Vehicle driving information routing table and data format information
4 信息传输流程
基于上面的分析,以车辆i为发射源节点为例说明,该机制的具体步骤如下。
(1)初始化:车辆i根据其发射功率、周围车辆的数目以及相对位置等参数确定其覆盖范围,建立初始路由表。
(2)车辆i与列表中的车辆建立D2D链路。
(3)判断车辆的行驶状态,及时发送信息:① 如果车辆i的行驶参数发生改变,则及时发送给其他车辆;若不发生改变则不需要重新发送信息,只需在一定时间间隔上报无变化信息0;除非有新的车辆进入覆盖范围,只需单独发送信息给新加入的车辆n;② 若列表中其他车辆j的行驶参数发生改变或者其他突发情况,要及时发送信息给车辆i;若没有变化,则不发送信息,在一定时间间隔上报无变化信息0;③ 如果有新车辆n进入该覆盖范围,将其行驶参数发送给车辆i;④ 车辆的预警信息如果与当前的行驶参数不一致,提前发送给其他车辆,并等待其他车辆的反馈信息;车辆的预警信息与当前信息一致时,则向其他车辆发送信息0。
(4)根据车辆行驶参数,及时反馈信息:① 车辆j接收到车辆i的行驶状态发生改变时,根据信息判断行驶参数发生变化的车辆是否超出覆盖范围,若超出范围则由直接链路变成中继链路,若中继链路也不满足则不传递信息;及时更新路由表;② 车辆i接收到车辆j上报信息后,将发生变化的车辆信息在路由表信息中及时更新,无变化的车辆信息保持不变;③ 接收到新接入车辆n发送的信息,车辆i要及时地更新路由表,并将其反馈给车辆n;④ 车辆接收到其他车辆的预警信息变化时,若同意该车辆预警信息发生改变,则回复信息1;如果不同意其行为,即无法躲避其参数改变,则回复信息0。
重复步骤(3),与上报信息的车辆实时传递信息。
(5)车辆行驶状态的改变:其他车辆发生改变时,如果影响不到自身的行驶,则继续保持原状态;若无法躲避,则调整自己的行驶参数,并及时上报其信息,更新路由表,重复步骤(2)。
(6)判断是否进入RSU覆盖范围:如果进入RSU的覆盖范围,所有车辆在RSU调度管理下实时更新信息,并传递给其他车辆,防止紧急制动,以避免事故发生。
(7)驶出RSU覆盖范围后,重复步骤(1)。
基于D2D技术的中断模式的信息传输机制的流程图如图4所示。
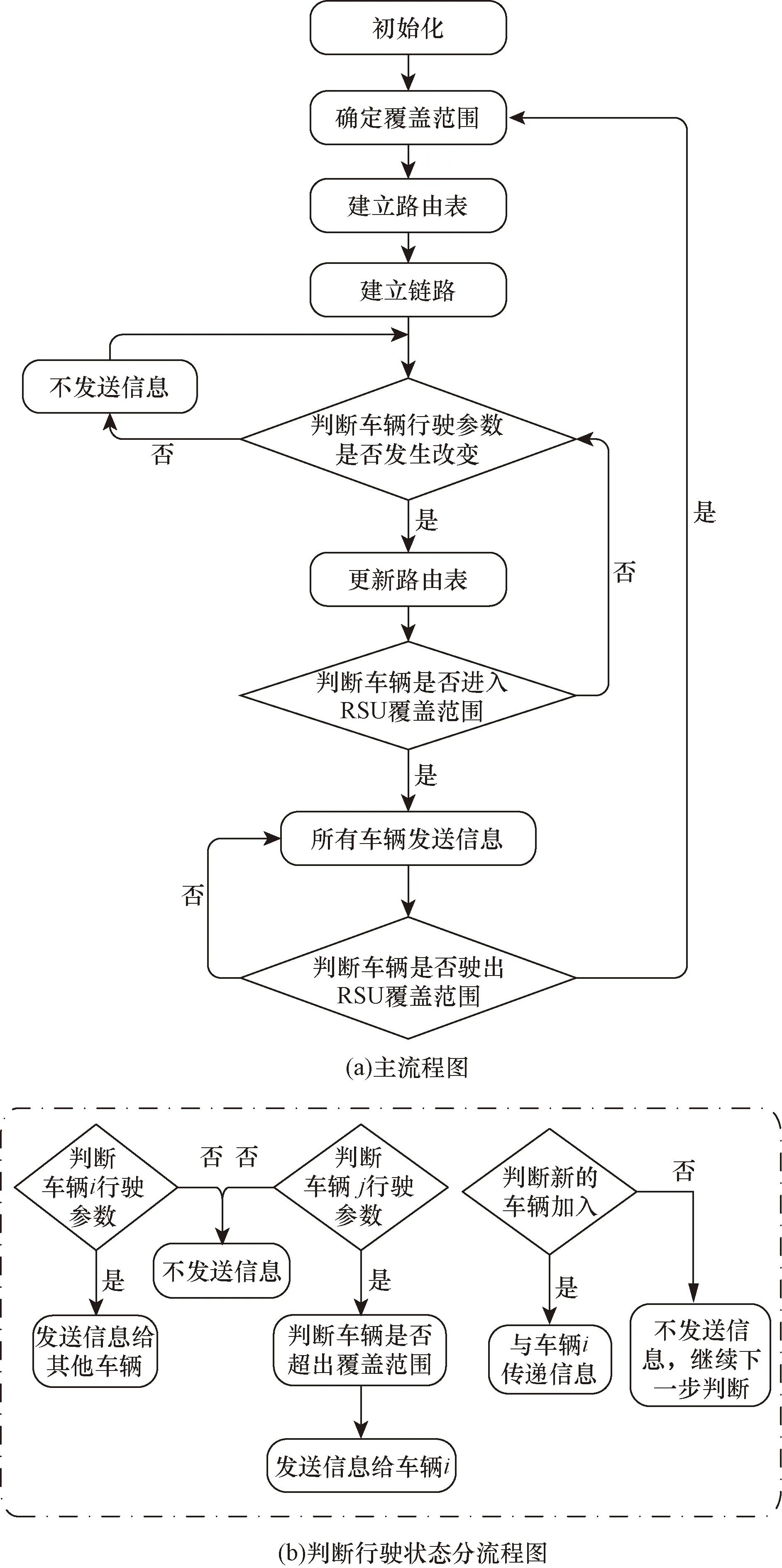
图4 传输机制流程图Fig.4 Flow chart of the transmission mechanisms
5 仿真结果
假定所有车辆配备了多个无线电接口,都能够同时进行V2V和V2I连接。采用 MATLAB仿真平台对提出的传输机制算法进行仿真验证。主要研究基于D2D技术的自组车联网以及RSU辅助的混合车联网中的数据传输机制。仿真场景采用双 RSU 的十字交叉路段,道路采用双向4车道,车辆在道路上的初始位置按照泊松分布随机分布,车速均固定在v0=45 km/h,按照±15 km/h随机变化,在路口时,受RSU指挥灯指挥。仿真的其他参数设置如表2所示。
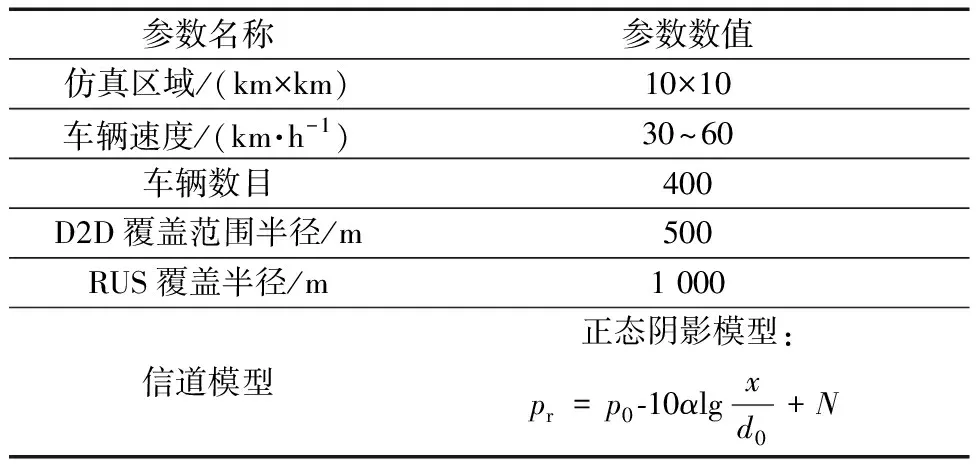
表2 仿真参数表Table 2 Simulation parameters table
图5分别描述了车辆总数量与信令开销、节点容量以及车辆链路连接数目的关系曲线。在提出的中断传输机制模式下,每隔一定时间周期性地向其他车辆直接发送信息,或者车辆的行驶状态发生改变时不需要发送请求指令而直接向对方发送信息,从而大大地降低了指令开销,相比较传统模式,该模式能够大大地降低信令开销,尤其在车辆数量较大时,效果更显著,如图5(a)所示。此外,由于车辆之间发送信息复用同一频谱资源,链路之间彼此存在干扰,而采用该中断模式,在车辆行驶过程中,如果行驶状态不发生改变,则无需向同一覆盖圈的其他车辆发送信息,不仅降低了发送信息的数量,同时也减小了发送信息的时隙,减少了信息发送次数,从而有效地避免了相互链路之间的干扰,一方面增加了保护圈的节点容量,如图5(b)所示;另一方面也增加了覆盖圈内车辆建立链路的最大数目,如图5(c)所示。此外,从图5(b)还可以发现,保护圈中复用同一资源的连接数目存在一个最优值。
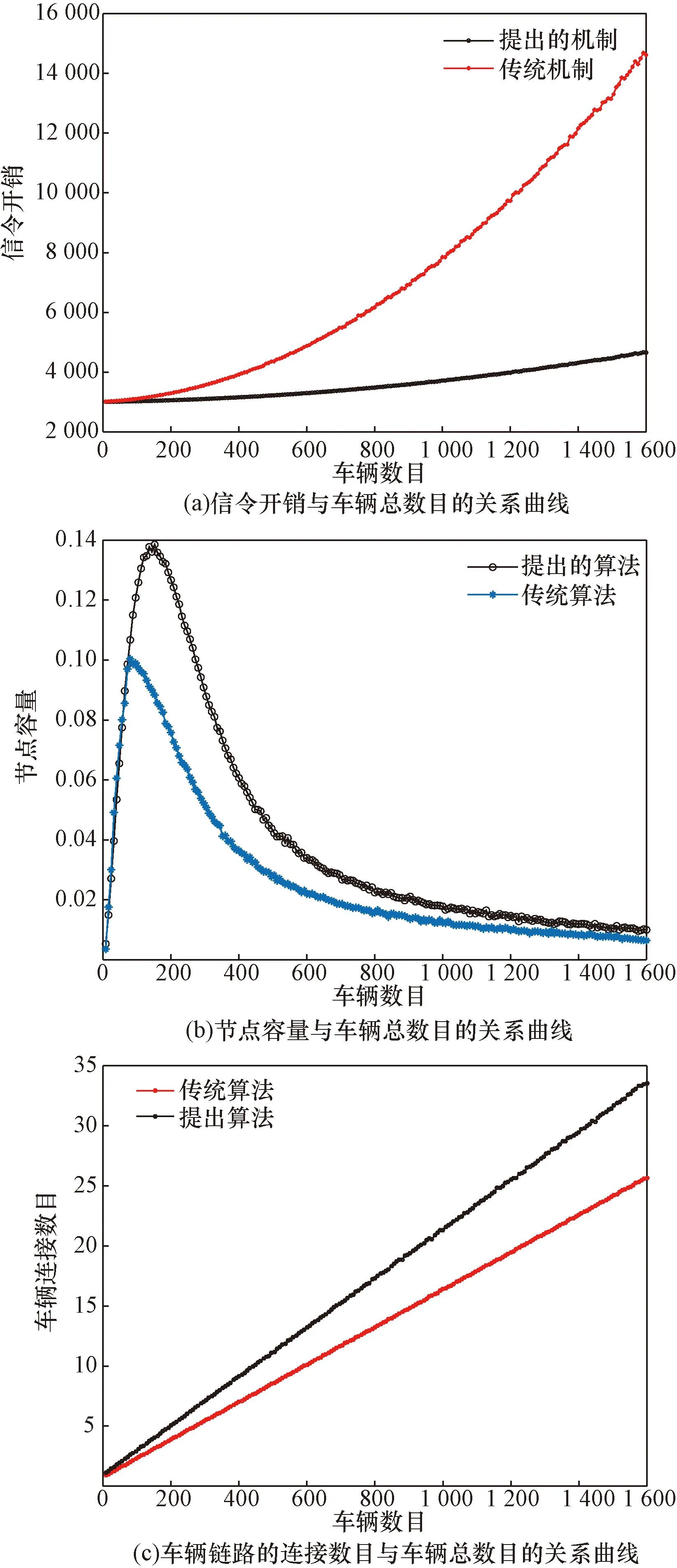
图5 中断模式与传统模式的传输性能对比图Fig.5 Transmission performance comparison between interrupt mode and traditional mode
车联网区别于无线网络的主要特点之一就是节点的移动性,从而导致网络拓扑的动态变化较大。车辆之间的相对速度对于性能参数的影响非常大,图6描述了车辆之间相对速度变化对信令开销与节点连接数量的影响程度。从图6(a)中可以看出:车辆的相对速度越大,意味着车辆的速度变化量大,则在提速(或减速)过程中发送信息指令更加频繁,故相应的信令开销就越大,车辆的总数目越大消耗的信令差距越大;另一方面速度变化越大,信息发送的次数增多,则在同一时刻占用链路的几率增大,相应链路之间的干扰就会增加,如图6(b)所示,随着车辆相对速度的增大,覆盖圈内车辆的连接数目也会相应地减少。
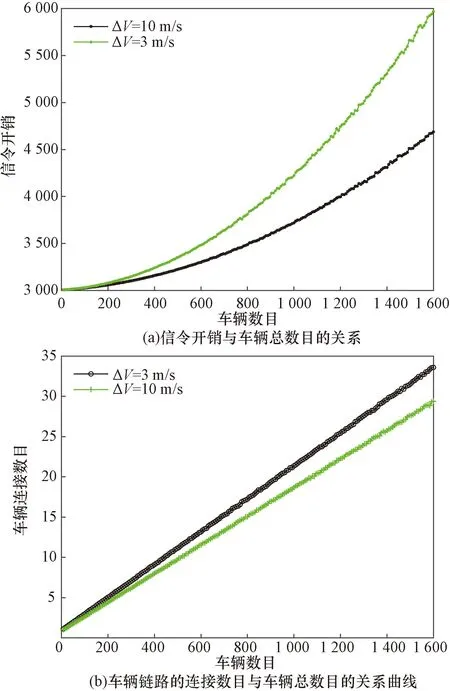
图6 在不同相对速度下中断模式的信令开销与连接数目Fig.6 Signaling overhead and number of connections in interrupt mode at different relative speeds
除此之外,图7描述了在不同相对速度下时车辆连接数目与时间的变化关系,从图7中可以发现:当车辆总数固定时,相比较于车辆行驶状态相对静止来说,车辆在随机运动状态下,不考虑特殊情况时,覆盖圈内建立连接的车辆数目会减小,但是数量变化不大。但是随着相对速度越大,覆盖圈内建立连接的车辆数目变化。
6 结论
在混合架构车联网中,车辆节点数量较少时链路容易中断,即网络鲁棒性较差,即链路容易失去联系,而随着车辆的移动以及数量的增多,导致链路干扰增加从而降低节点容量,以及信令急剧增多消耗大量的网络资源。在此,提出了一种基于D2D技术的中断信息传输模式,只有当车辆的行驶状态发生改变时才向其他车辆发送,同时为了避免车辆之间通信链路断开或者已经处于保护圈外部,需要每隔一定时间向其他车辆发送一个信息0,以此来确认保护圈内车辆之间的链路是否通畅。由于该机制利用车辆的相对移动来触发发送信息,降低了信息发送的频率,从而降低了链路之间的相互干扰,减少了信令开销,提高了系统的信道容量,增加了车辆的连接数目。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23
党的生活(黑龙江)(2022年4期)2022-04-25
移动通信(2021年5期)2021-10-25
通信世界(2018年27期)2018-10-16
电脑与电信(2018年11期)2018-02-16
职工法律天地·下半月(2016年9期)2016-11-30
电子制作(2016年23期)2016-05-17
科技视界(2016年9期)2016-04-26
风能(2015年10期)2015-02-27
中国交通信息化(2014年3期)2014-06-05