基于自动驾驶车辆调度的停车系统收费策略优化
2024-02-12 07:43:10冯驰梅振宇
浙江大学学报(工学版) 2024年1期
冯驰,梅振宇
(1.衢州学院 机械工程学院,浙江 衢州 324000;2.浙江省空气动力装备技术重点实验室,浙江 衢州 324000;3.浙江大学 智能交通研究所,浙江 杭州 310058;4.浙江大学 平衡建筑研究中心,浙江 杭州 310058)
停车是车辆行程的重要组成部分,根据统计[1]可知,车辆的真实使用时间仅占总时间的5%,剩余95%的时间都在停车.随着我国经济水平的提升以及小汽车数量的高速增长,停车问题日益成为城市发展不可忽视的主要交通问题之一.Barone 等[2]的研究显示,停车及停车巡游行为会增加25%~40% 的交通量,而在停车需求较大的区域,出行者往往需要花费10 min 以上的时间以搜寻可用停车位[3],而最终的停车位可能远离出行者的目的地.这一过程不仅会降低出行者的出行体验,而且增加了社会运行成本.停车问题的根本原因是车辆对停车位的需求大于停车位的供给,这不仅表现在城市停车位总量不足,还表现在停车供需时空不平衡.由于城市土地稀缺,通过增大供给解决停车供需矛盾困难重重,在此背景下,停车系统通过一定的策略合理配置停车资源是缓解停车矛盾的可行途径.
现有的停车资源配置策略一般以有人驾驶车辆为研究对象,随着通信技术、感知技术及高性能计算设备等的进步,自动驾驶技术高速发展,自动驾驶车辆将步入现实,未来的停车系统将面对有人驾驶车辆(human-driven vehicle,HDV)和自动驾驶车辆(autonomous vehicle,AV)共存的交通场景,这对缓解停车矛盾既是挑战,也是机遇.
本文以HDV 与AV 共存停车系统为研究对象,系统在对所有车辆收取停车费用外,可以另向HDV 收取一定的调度费用.借助AV 可自动驾驶的能力,在多个停车场组成的停车系统内部调度AV 为HDV 创造可用停车位,达到提高停车系统收益、降低社会成本的综合目标.
1 相关工作
高水平的自动驾驶技术有望改变车辆的停车模式.出行者不需要先完成停车再前往其目的地,相反,出行者可以在目的地下车,然后令AV 自行前往指定停车场完成停车.如图1 所示,与HDV 出行者相比,AV 出行者可在其目的地下车,无须步行.
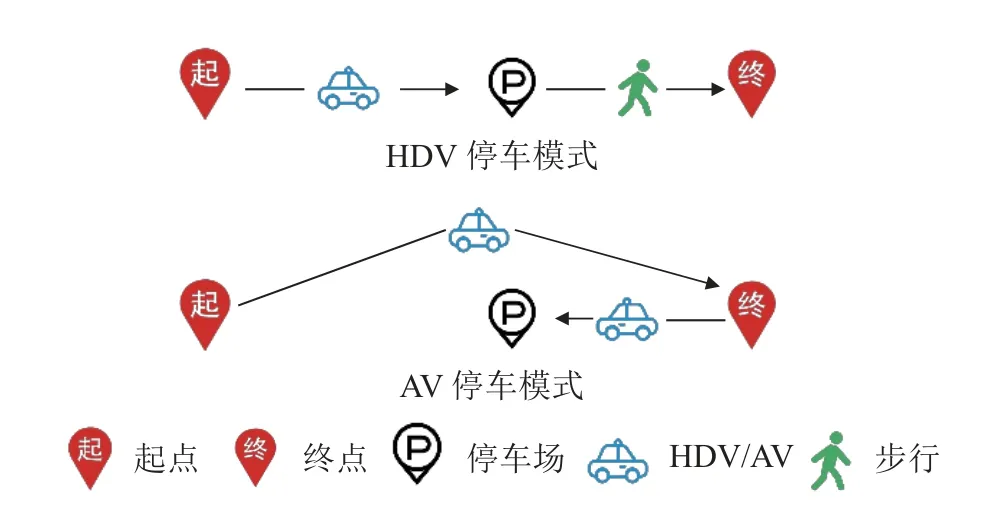
图1 有人驾驶车辆与自动驾驶车辆出行者的停车模式示意图Fig.1 Parking patterns of human-driven and autonomous vehicle users
针对AV 带来的新型停车模式,许多学者对交通系统、土地利用、城市规划等方面的影响开展了相关研究.Zakharenko[4]建模、标定和分析了AV 对城市形态的影响,研究表明,AV 停车需求将转移到城市的外围地区,AV 较低的交通成本将使城市规模扩大.Harper 等[5]基于agent 建立HDV 和AV 混行的交通仿真模型,基于西雅图数据的模拟结果表明,随着AV 渗透率的增加,部分停车场的运营在经济上将不可持续,这会导致市中心土地使用转向其他用途.Zhang 等[6]首次在完全自动化交通环境下研究AV 出行和停车的交通网络均衡问题,与HDV 出行相比,AV 会降低乘客的出行成本,但会加剧交通网络拥堵.
对于AV 的停车管理而言,许多面向HDV 的停车策略可以应用到AV.Liu[7]以AV 通勤者为研究对象进行交通网络均衡建模,以系统最优为目标,开发了时变的最优拥堵收费方案.Wang 等[8]在区域内存在多个停车场的情况下,建立AV 连续时间随机动态模型,该模型通过动态调整各停车场的停车价格优化AV 的停车管理.Radvand等[9]构建常微分方程组来模拟AV 的停车选择,研究AV 通过巡游以替代停车这一行为对交通拥堵的影响,利用所提出的模型,Radvand 等[9]基于时间进行动态收费和停车供应,以优化系统性能.Bahrami 等[10]基于agent 建立AV 停车仿真模型,在该模型中,AV 可以不停车,而以巡游的方式等待出行者,这一行为将增加车辆能源消耗以及加剧交通网络拥堵,因此,研究建议向没有搭载出行者的空载车辆收取通行费用.Millard-Ball[11]基于agent 模拟AV 交通系统,该研究提出AV 拥堵收费方案,费用包含2 个部分:一是基于时间计量的AV 占用公共路权的费用,二是基于行驶距离计量的费用.与文献[10]不同的是,文献[11]研究的收费对象包含非空载的AV.为了减少AV 可能增加的行驶里程,Yan 等[12]提出在必要的时间内转移一些车道,为AV 提供路边停车位,北京市望京区的数值实验表明,适当的随时间变化的路边停车规划可以将AV 总行驶里程降低10%~27%.Sayarshad[13]考虑土地使用和AV 出行成本,为AV 日常停车确定了停车位的最佳租金投标,基于曼哈顿核心区的算例表明,在该策略下,停车价格下降了34%,平均空载行程减少了22%.Xie 等[14]将共享停车思想引入AV 停车管理,构建用于AV 的共享停车分配和引导优化框架,该框架周期性地优化多个候选相邻停车场的匹配,通过考虑时变链路行程时间的全局停车路径算法进行车辆的路线选择.
在这些传统的基于收费的停车管理策略外,车辆调度受到了研究者的关注.车辆调度不完全依赖于自动驾驶技术,如Ramezani 等[15]基于宏观基本图(macroscopic fundamental diagram,MFD)优化城市出租车调度系统,解决了城市拥堵问题.与出租车相比,AV 的自动行驶能力使得调度效率更高.Khalid 等[16]设计在全自动驾驶环境下的停车调度系统,该系统将为出行者选择下车点,综合停车价格、行驶能耗及到停车场的距离,为AV 提供最优停车场并进行调度.Zhao 等[17-18]考虑到AV 在交通网络上的不均匀分布将加剧交通拥堵以及HDV 和AV 的停车竞争,因此设计集中调度停车系统.该系统基于模型预测控制(model predictive control,MPC)在区域间直接调度AV 以缓解停车竞争,数值实验表明,利用该调度系统可以有效地减少HDV 停车巡游,但AV 的行驶时间总高于HDV,且未得到相应的补偿.
综上所述,基于收费的传统停车管理策略依然被研究者应用于AV 停车管理[11].基于AV 可自动驾驶特性的车辆调度是未来停车管理的研究方向.当前对AV 的停车管理研究大多围绕完全自动化的交通系统展开,而实际上,在AV 普及前,交通系统将经历AV 和HDV 共存的漫长过渡期[19],因此,AV 和HDV 共存环境下的停车管理问题更亟待探讨.本文将以HDV 与AV 共存停车系统为研究对象,设计并优化基于AV 调度的停车收费策略.
2 基于智能体的停车模型
基于agent 的建模是模拟复杂系统(如交通系统)的有力工具.在停车系统中,agent 可以用于代表车辆、行人、停车场、路段等不同实体.基于agent 的模型用于停车系统的优点是能够捕捉真实世界系统的异质性和复杂性.通过模拟单个agent 的行为,研究者可以更好地了解系统中微观个体的运行方式,研究分析不同的停车管理策略会如何影响系统性能.为了更好地刻画HDV 和AV 以及评估基于AV 调度的收费策略,建立基于agent 的停车模型.
如图2 所示为HDV 出行者停车流程的示意图.HDV 出行者在路网的每一个交叉口,根据停车成本最小化原则进行停车选择,并驶向目标停车场.广义停车成本的计算式[20]为
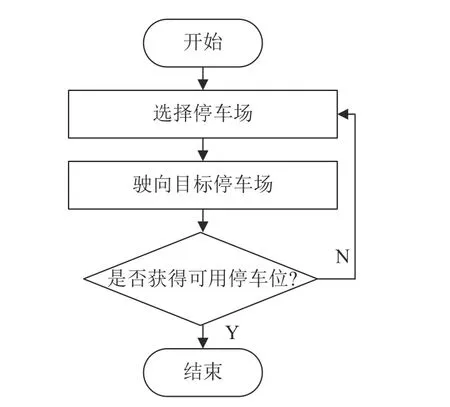
图2 有人驾驶车辆的停车流程示意图Fig.2 Parking flow diagram of human-driven vehicle
式中:Ck为选择停车场k的广义停车成本,为车辆从当前位置到停车场k的行驶时间,fk为在停车场k所需要支付的停车费用,为停车场k到目的地的步行时间,V为时间价值系数,αt、αf和 αw分别为行驶时间、费用和步行时间的权重系数.
与HDV 不同,AV 出行者可以先在目的地下车,然后预订车位,令AV 自行完成停车,决策流程如图3 所示.AV 广义停车成本的计算式[10]为
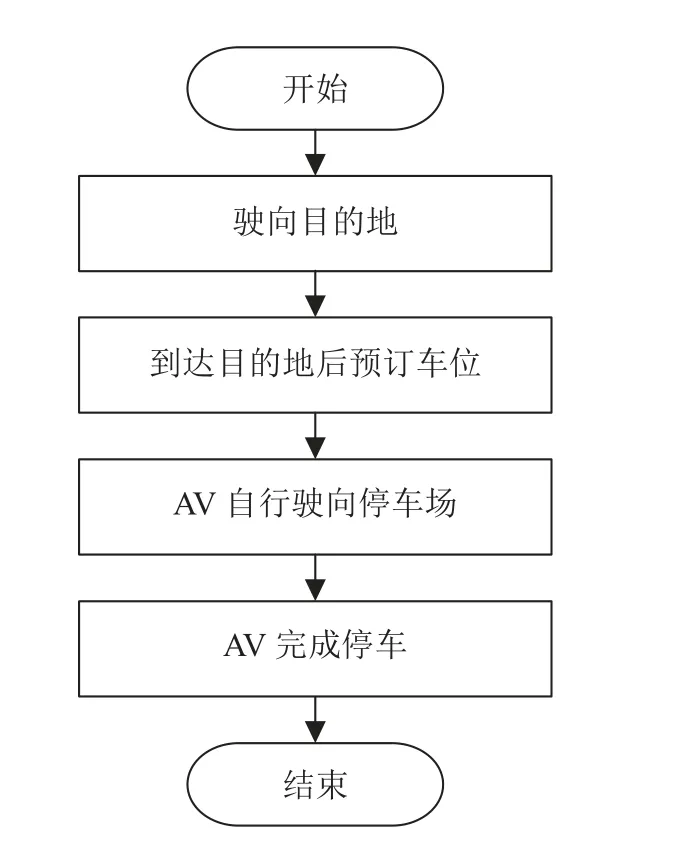
图3 自动驾驶车辆的停车流程示意图Fig.3 Parking flow diagram of autonomous vehicle
式中:dk为目的地到停车场k的行驶距离,F为单位距离行驶能耗,αe为行驶能耗的权重系数.
3 基于自动驾驶车辆调度的收费策略
3.1 自动驾驶车辆调度策略的设计与调度方案规划
从HDV 和AV 停车选择成本来看,AV 对目的地与停车场间距离的敏感性较低.当某停车场无空余泊位时,停车调度系统可以借助AV 可自动驾驶能力,将AV 调至系统内的其余停车场,为HDV 创造可用停车位,使得HDV 可以更方便地完成停车,从而提升停车系统的运行效率.为了简化起见,给出如下假设.
1)研究涉及的停车场均归属于同一停车系统.
2)停车系统中的AV 在获得补偿的前提下均接受系统调度,且仅考虑停车场间的调度,不考虑目的地到停车场途中的调度.
3)不考虑车辆损坏、道路拥堵此类导致车辆无法调度的情况.
4)不考虑调度过程中AV 停车结束的情况.
5)停车系统中各停车场的停车收费标准一致.
停车调度系统的运营流程如图4 所示.当停车场无空余泊位但存在可调度AV 时,停车系统向外界释放可停车信息及相应需要收取的调度费用.在HDV 到达该停车场后,若有空余泊位,则HDV 直接完成停车;若无空余泊位,但存在可调度AV,则停车系统规划形成调度方案.在HDV 出行者接受并支付相应费用后,AV 被调离,HDV 完成停车;否则,HDV 重新进入路网,选择其他停车场进行停车.
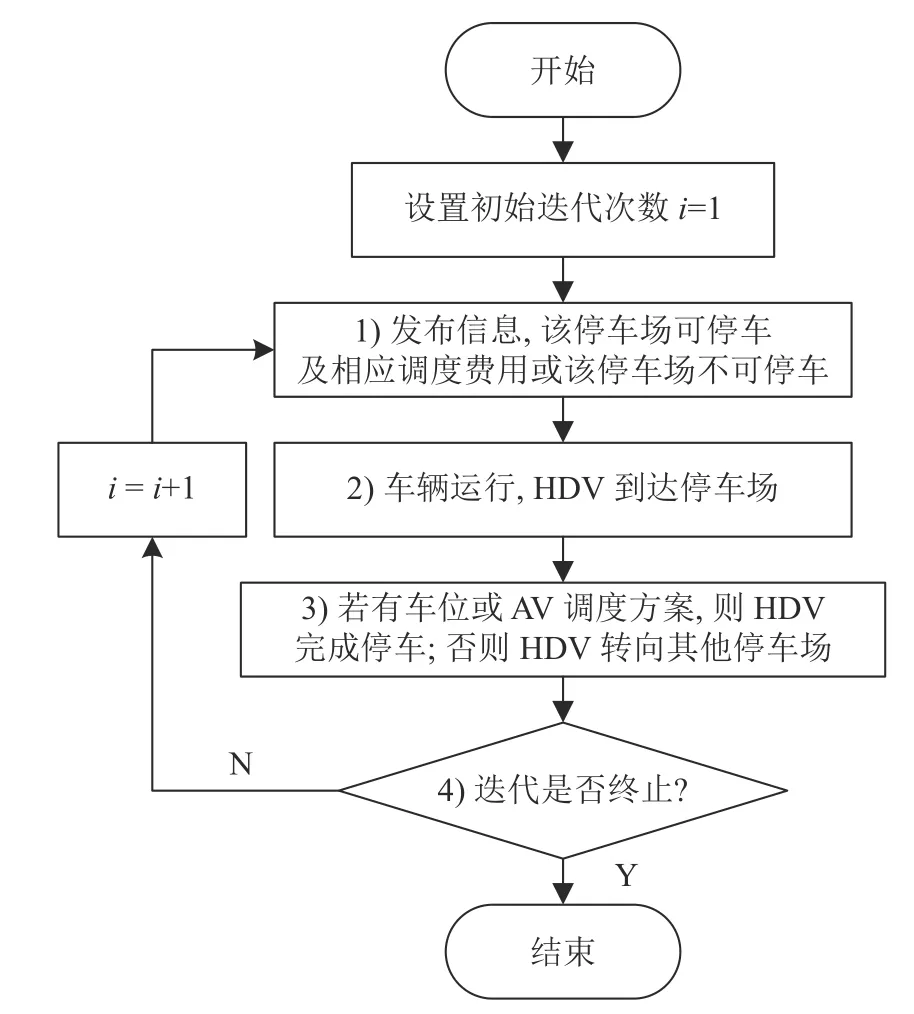
图4 停车调度系统的运营流程Fig.4 Operation process of AV dispatch system
停车调度系统向HDV 收取的调度费用包含以下2 个部分.1)调度AV 的硬性成本,该部分支付给被调度AV,以覆盖调度增加的停车成本,假设系统内各停车场收费一致,则该部分仅与AV 额外行驶里程相关.2)提供调度服务收取的服务费,服务费可以因停车场的不同而有所差异,如热门停车场可以将服务费设置高于冷门停车场,但在本研究的系统运营过程中各停车场的服务费不会随时间动态变化.差异化的服务费不仅有助于增加停车系统的营收,而且能够将停车位提供给更需要的客户,有望提升系统效率.
调度成本取决于被调度AV 的额外行驶里程,计算式如下:
式中:l为AV 额外行驶里程,lpp′为AV 原停车场与新停车场间的距离,lp′d为AV 新停车场与目的地间的距离,lpd为AV 原停车场与目的地间的距离.最简单的调度方案是单辆AV 调度,即将停车场中的1 辆AV 调至系统内有空余泊位的停车场,为HDV 创造可用泊位.单辆AV 调度方案简单、直接,但成本不一定最小,以图5 为例.
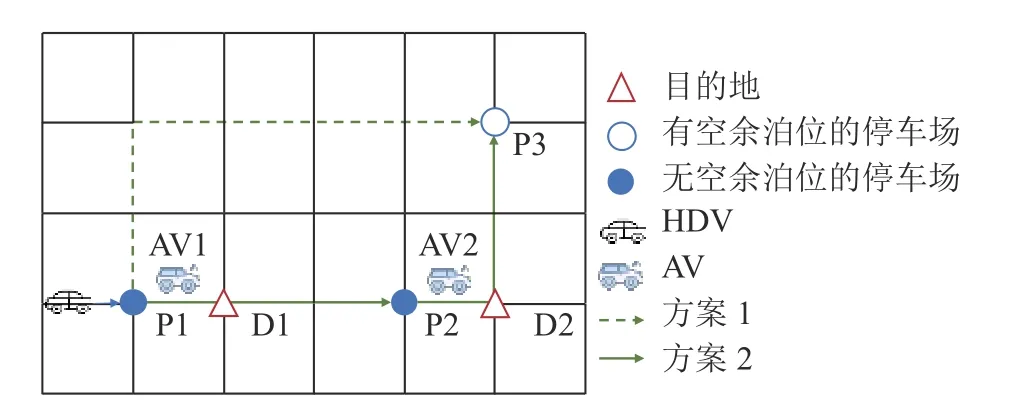
图5 自动驾驶车辆调度方案的对比图Fig.5 Comparison of autonomous vehicles dispatch schemes
图5 中,方案1 为单辆AV 调度,方案2 为多辆AV 协同调度,两者的调度成本如表1 所示.可见,多辆AV 协同调度的成本更小.

表1 自动驾驶车辆调度方案的成本对比表Tab.1 Cost comparison of autonomous vehicles dispatch schemes
通过建立0-1 型整数线性规划模型规划多辆AV 协同调度方案,模型的目标函数为
式中:sd为调度成本,要求覆盖被调度AV 的额外行驶成本;I为随机从各个停车场中选取来自各个目的地的AV 1 辆而形成的参与调度AV 集合;P为停车场集合;lij为AVi∈I到停车场j∈P所需要的额外行驶里程;xij为决策变量,若指派AVi∈I去停车场j∈P则为1,否则为0;F为单位距离行驶能耗.模型约束如下.
式(5)表示调度到某停车场的AV 数量不超过该停车场可用泊位的数量,其中cj为去除参与调度的AV 后停车场j∈P的可用泊位数量,v为HDV目标停车场,v∈P.式(6)表示调度后HDV 目标停车场应有可用泊位供其停车,其中cv为目标停车场v去除参与调度AV 后的可用泊位数量.式(7)表示参与调度的AV 应获得可用泊位.式(8)为lij的计算方式,其中D为结点间的行驶距离,di为AVi∈I的目的地di∈D,pi为AVi∈I当前所在停车场pi∈P,当停车调度系统需要AV 调度方案时,系统调用该模型,给出调度方案和调度成本.
3.2 自动驾驶车辆的调度收费优化
停车调度系统除了收取与调度成本相当的费用外,还收取服务费,调度费用可以表示为
式中:s为调度费用;sd为调度成本,通过式(4)优化获得;ss为停车场设置的固定调度服务费.相应地,HDV 出行者在停车选择时将s纳入停车费用计算广义停车成本.服务费将影响HDV 出行者的停车选择,停车系统可以通过优化区域内不同停车场的调度服务费用,以优化停车泊位在出行者群体中的分配,进而提升停车系统的运行效果,提高停车系统的运营利润.各个停车场的服务费价格对系统的影响不相互独立.若采用网格搜索,则计算量将十分庞大.采用遗传算法优化各停车场服务费的定价方案,算法通过自然选择和突变寻得优化解,具体流程如图6 所示.
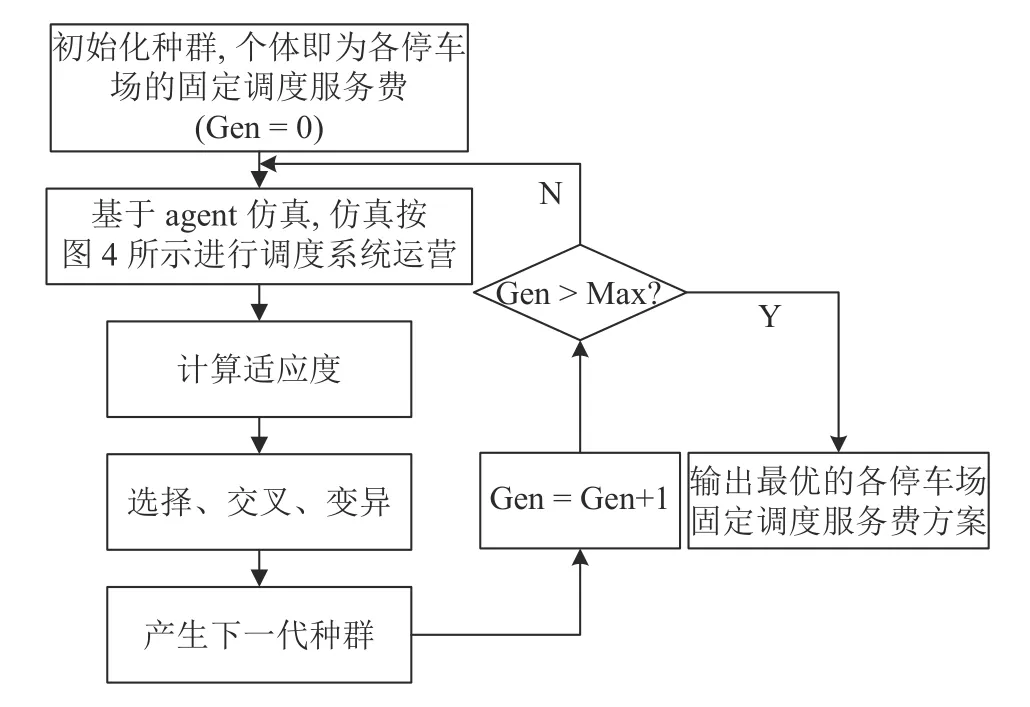
图6 调度服务费制定的流程图Fig.6 Flow chart of dispatch service fee formulation
图6 中,种群的每个个体为各停车场调度固定服务费,确定各停车场调度固定服务费后,基于agent 的仿真进行个体评价.在仿真过程中,按照图4 所示的流程进行停车调度系统运营,运营过程中的调度方案通过式(4)~(8)给出,在仿真完成后根据仿真结果计算个体的适应度.以综合指标作为适应度进行个体评价,综合指标的计算公式如下:
式中:Dp为AV 停车里程,为AV 从目的地到初始停车场的里程,为AV 从最终停车场返回目的地的里程,为AV 在不同停车场间调度的里程,1/2 是将停车里程平均到往返两端路程上.
4 应用示例及分析
4.1 应用算例
基于杭州武林商圈构建路网,分析评价基于AV 调度的停车系统收费策略.武林商圈区位图如图7 所示.
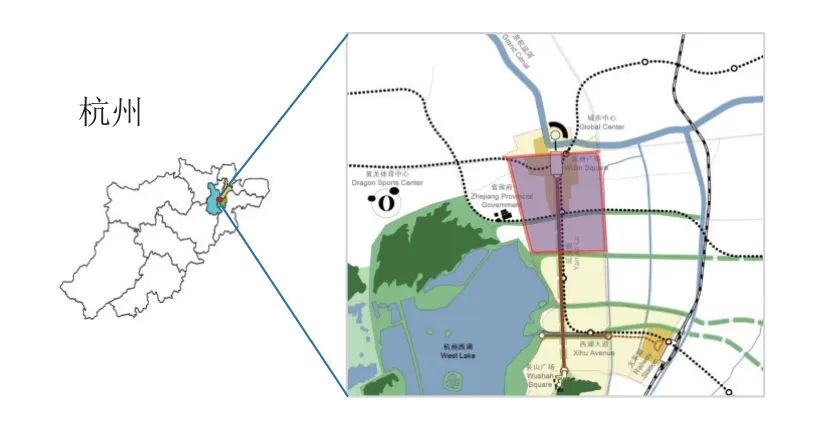
图7 武林商圈区位示意图Fig.7 Location of Wulin Business District,Hangzhou
如图8 所示为武林商圈路网的拓扑图,研究区域包含4 个入口、4 个目的地、94 个交叉口、324 条路段、9 个路外停车场,停车场皆属同一停车系统运营管理.停车位数量分别为323、371、198、384、235、260、285、297 及347 个,数量总共为2 700 个.研究范围内的停车收费一致,均为4 元/h.道路通行速度参考Chiu 等[21]的研究,计算式如下:
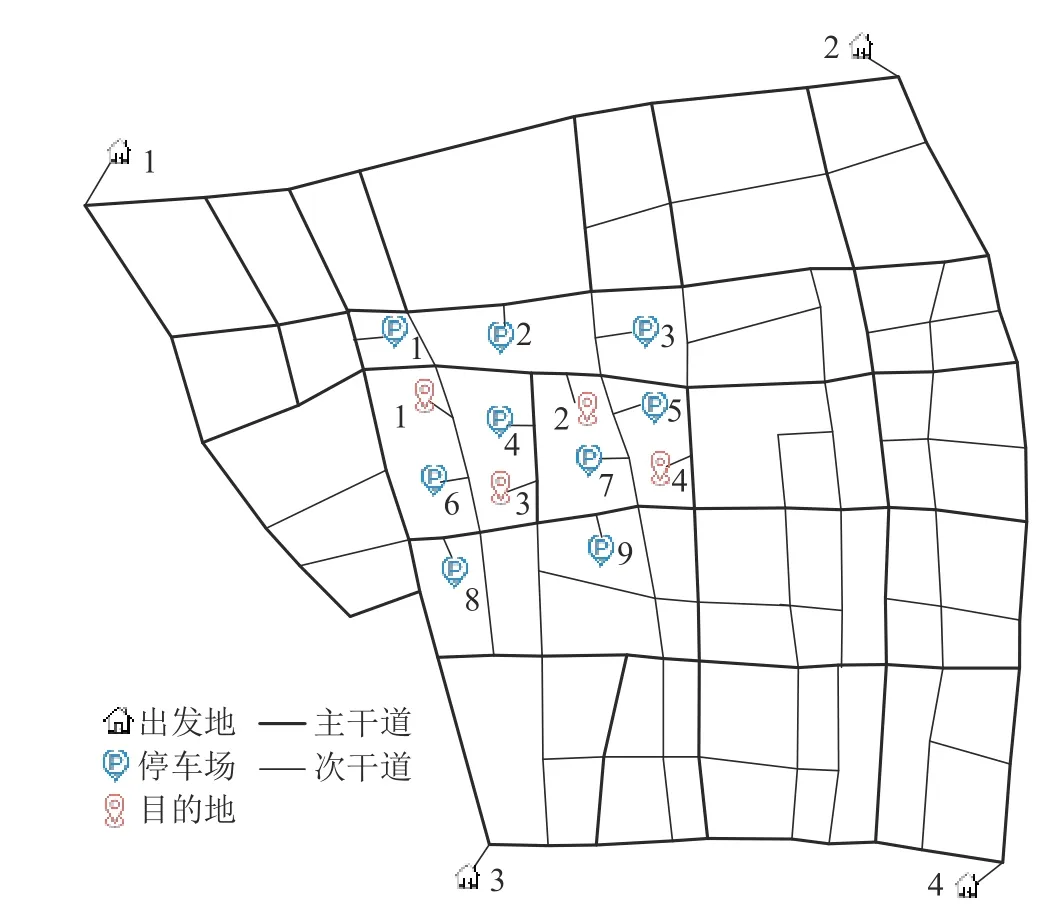
图8 武林商圈的路网拓扑图Fig.8 Road network of Wulin Business District
式中:v为通行速度,vf为自由流速度,v0为最小速度,g为路段密度,ga为临界密度,gb为阻塞密度,β为交通流速度的相关系数.
出行者的出行分布如表2 所示,出行者数量总共为2 600.仿真起始时刻为0 s,各OD 出行者在时段[0,5 400] s 中均匀分布.
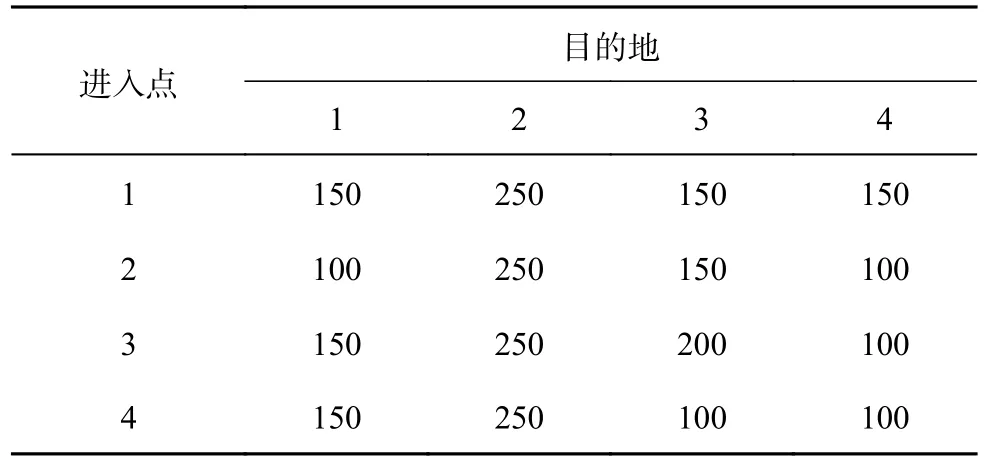
表2 出行分布表Tab.2 Travel distribution
其他的模型参数参考现有研究的设置[22-23],具体如表3 所示.模型假设相关策略及AV 渗透率的变化不改变出行者的出行时空分布及其出行方式.
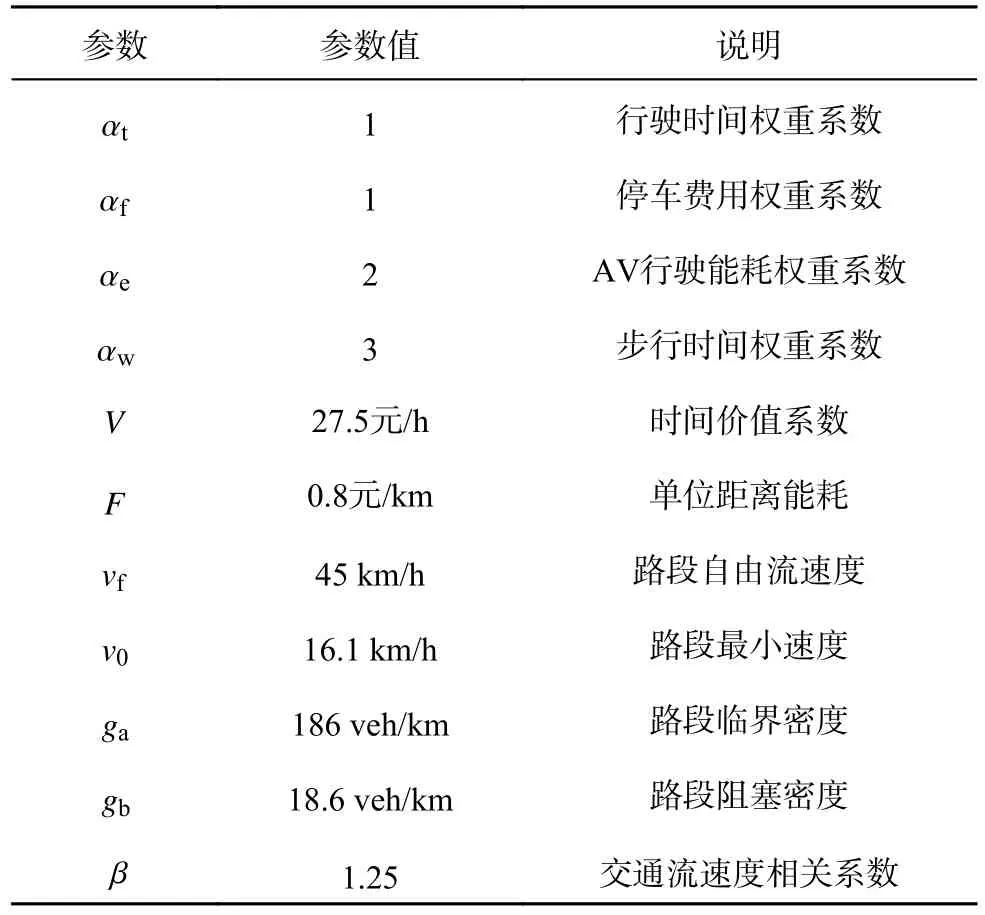
表3 基于agent 模型的参数取值表Tab.3 Value of parameters of agent-based model
4.2 基于自动驾驶车辆调度的收费策略评价
对基于自动驾驶车辆调度的差异化收费策略进行评价,并与常规策略、基于自动驾驶车辆调度的统一收费策略进行比较分析.
1)常规策略,即不实行AV 调度.
2)基于自动驾驶车辆调度的统一收费策略,实行AV 调度,区域内各停车场的调度服务费一致.
3)基于自动驾驶车辆调度的差异化收费策略,实行AV 调度,对区域内各停车场的调度服务实行差异化收费.
通过综合指标对策略效果进行评价,计算公式如式(10)~(12)所示.c1和c2分别取-0.5 和0.01,因此,社会成本越低,额外收入越高,则综合指标CB越大,wt、ww和wd分别取1、3、1.
以0.1 为步长,当AV 渗透率r为0.1~0.9 时,对3 类策略进行比较分析.在每一个AV 渗透率下,策略2)基于自动驾驶车辆调度的统一收费策略,以1 元为步长,在0~8 元内寻找使综合指标最大的服务费收费值.策略3)基于自动驾驶车辆调度的差异化收费策略,以式(10) 为适应度函数,通过遗传算法优化各停车场的调度服务费.具体设置如下:种群下限为0 元,上限为8 元,种群初始值在上下限范围内随机生成,变异率为0.15,交叉率为0.85,种群迭代代数为50,种群数量为25.
由于AV 停车活动发生在出行者到达目的地后,重点关注HDV 时间指标,包括平均行驶时间、平均步行时间及平均总时间.
如图9 所示为不同策略下HDV 出行者时间指标在不同r下的对比图.可见,在3 项时间指标上,基于AV 调度的差异化收费策略与统一收费策略相当,或略低于统一收费.这是因为差异化的调度服务费会通过影响HDV 停车选择来优化停车资源配置,两者皆优于常规策略.
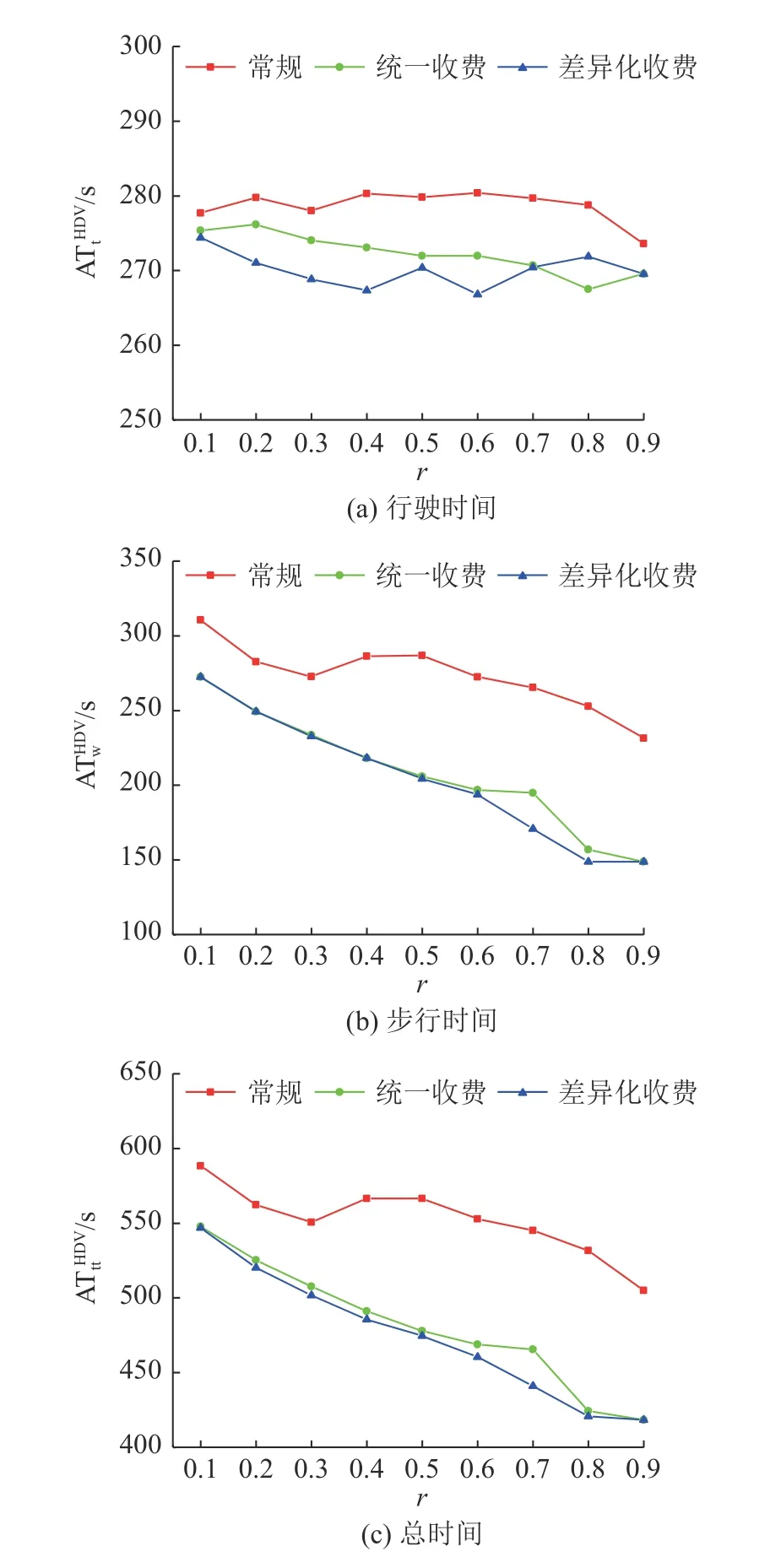
图9 不同策略下有人驾驶车辆的平均时间指标Fig.9 Average time of human-driven vehicles under different strategies
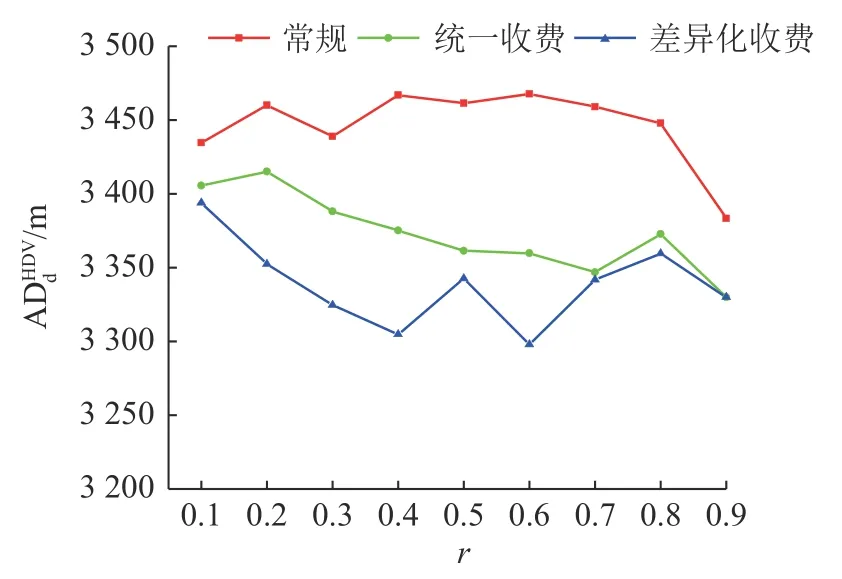
图10 不同策略下有人驾驶车辆的平均行驶里程Fig.10 Average travel mileage of human-driven vehicles under different strategies
对于AV 而言,从进入点到目的地的行驶里程相对固定,重点关注AV 从目的地到停车场的行驶距离,即平均停车里程,可以按式(12)得到.如图11 所示为不同策略下的AV 平均停车里程对比.可见,2 项基于AV 调度的收费策略在不同比例下互有高低,常规策略下的AV 平均停车里程总是最低的,且远低于2 项基于AV 调度的收费策略.
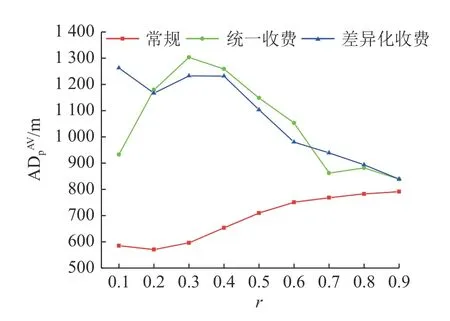
图11 不同策略下自动驾驶车辆的平均停车里程Fig.11 Average parking mileage of autonomous vehicles under different strategies
如图12 所示为2 项基于AV 调度收费策略的总调度服务费收入Ss的对比图.可见,差异化收费可以给系统带来更高的利润.
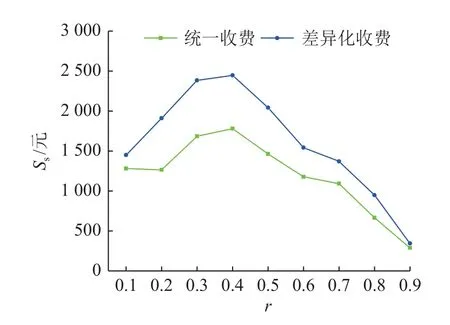
图12 不同策略下的调度服务费收入Fig.12 Dispatch service income under different strategies
如图13 所示为不同策略下的社会成本Cs.可见,利用基于AV 调度的差异化收费策略和统一收费策略,均可以有效地减少社会成本,其中差异化收费策略略优于统一收费策略.
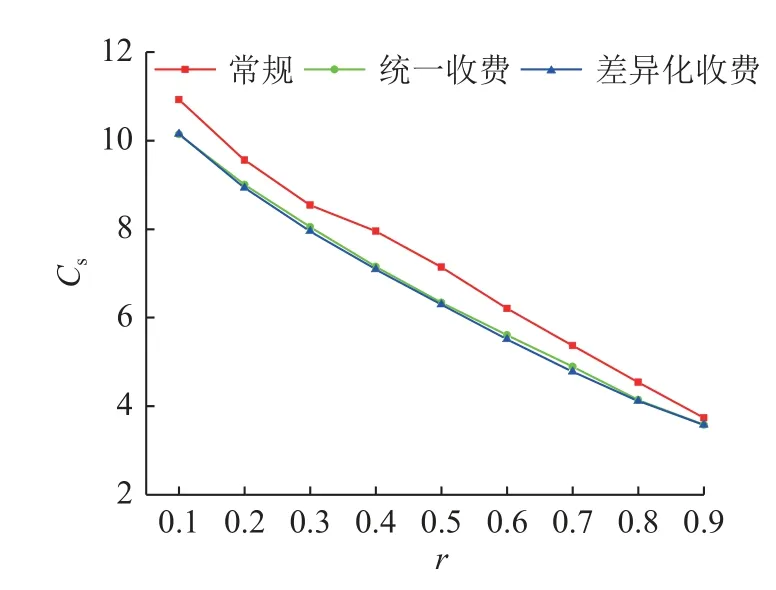
图13 不同策略下的社会成本Fig.13 Social cost under different strategies
如图14 所示为不同策略下的综合指标对比图.可见,基于AV 调度的差异化收费策略优于统一收费策略,且两者均显著优于常规策略.
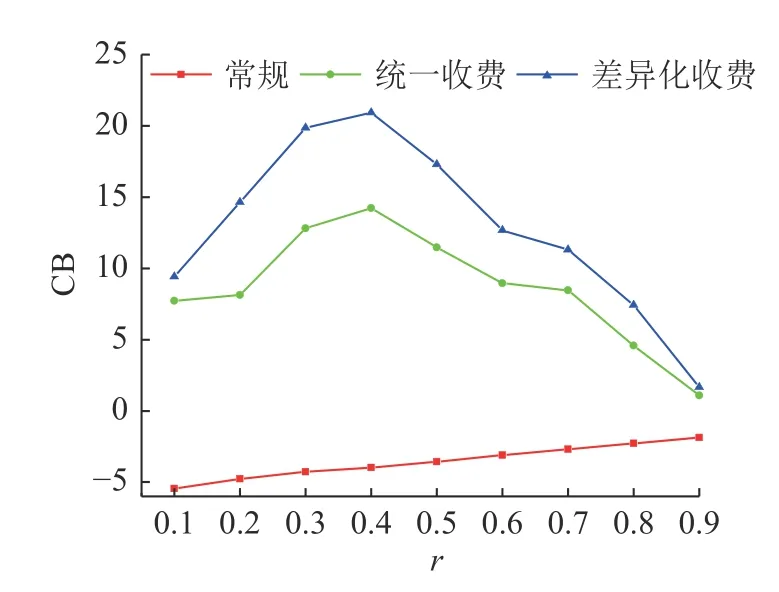
图14 不同策略下的综合指标Fig.14 Comprehensive index under different strategies
5 结语
本文针对HDV 和AV 共存停车系统,设计基于AV 调度的停车系统收费策略.该策略在向HDV 出行者收取相应费用后,通过在停车场间调度AV 为HDV 创造可用停车位,基于AV 调度收费策略具体可以分为统一收费策略和经遗传算法优化的差异化收费策略.基于agent 模型的应用示例表明,利用2 项基于AV 调度的收费策略,均可以有效地降低HDV 步行时间、行驶时间、行驶距离、社会成本,提升停车系统的服务费收入,从而提升系统的综合指标.差异化收费策略通过影响HDV 停车选择,可以更有效地优化停车资源配置,与统一收费策略相比,在取得更高调度服务费的同时,社会成本与统一收费相当或更低,取得了比统一收费更好的综合指标.
未来的研究将在出行者时空分布不完全确定的情况下,结合停车预测进行停车调度.本研究中,AV 仅获得与额外停车成本相当的补偿,实际上AV 出行者也会追求自身利益最大化,因此AV 出行者与停车系统的博弈值得探讨.
猜你喜欢
文萃报·周五版(2024年9期)2024-04-20 04:49:40
少先队活动(2022年5期)2022-06-06 03:44:20
音乐天地(音乐创作版)(2022年1期)2022-04-26 13:51:14
中国(俄文)(2020年4期)2020-11-24 00:16:05
草原歌声(2020年1期)2020-07-25 01:45:16
今日农业(2019年12期)2019-08-15 00:56:32
电子制作(2018年9期)2018-08-04 03:31:18
电子制作(2016年15期)2017-01-15 13:39:21
少年博览·初中版(2016年11期)2016-11-30 05:02:05
中国石油石化(2015年17期)2015-06-01 12:21:42