
Micro LED 车灯投影光学系统设计与优化
2024-02-05 09:06李香兰吕金光郑凯丰陈宇鹏赵百轩赵莹泽秦余欣王惟彪梁静秋
中国光学 2024年1期
李香兰,金 霞,吕金光,郑凯丰 ,陈宇鹏,赵百轩,赵莹泽,秦余欣,王惟彪,梁静秋
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049;3.中国电子科技集团公司第四十六研究所,天津 300220)
1 引言
随着自动驾驶、智能网联等技术的兴起,汽车产品不断向“信息化、智能化、安全化”发展。车灯在智能汽车的车-车、车-人交互中发挥重要的作用,因此,具备智能照明和投影显示功能的智能车灯成为下一代车灯的发展方向[1-2]。
2015 年,梅赛德斯-奔驰发布了F 015 概念车,可通过车灯向地面投射各种图像和数字信息,与道路使用者进行交流,通过投影显示功能实现车-车、车-人交互[3]。随着智能车灯的发展,海拉、德州仪器、奥迪等公司先后开展了基于液晶显示技术(Liquid Crystal Display,LCD)和数字光处理技术(Digital Light Processing,DLP)的车灯投影技术的研究。2017 年,欧司朗以有源驱动的发光二极管(Light Emitting Diode,LED)作为显示光源,对每个像素点进行单独开/关调控,在防眩目的同时实现了1 024 像素点的车灯投影显示[4]。2021 年,智己L7 搭载了具有百万级像素的DLP数字投影大灯,可根据不同场景在照明的同时进行投影显示,实现信息交互[5]。
从车灯设计的国内外发展现状可以看出,目前的车灯投影显示主要采用LCD 和DLP 技术。其中LCD 投影显示技术以液晶显示芯片作为空间光调制器,通过调控电信号对液晶透过率进行控制以实现图像显示,由于需要背光光源及相应的光学元件,因此体积较大、光利用率较低。DLP 投影显示技术通过驱动电路控制DMD 对照明光进行灰度调制,形成图像[6-8],其系统复杂度和使用成本较高。此外,传统的LED 技术也被应用到车灯投影系统中,但由于LED 像素单元相对较大,系统分辨率受到一定限制。
微型发光二极管(Micro Light Emitting Diode,Micro LED)作为一种自发光显示器件,具有LED 的亮度高、寿命长、功耗低、响应快等优势,同时其像素尺寸小、密度高,更易于实现高分辨率、高对比度和高集成度的投影显示[9-12],在汽车投影显示领域具有广阔的应用前景。
基于Micro LED 独特的光电特性,本文提出了一种Micro LED 阵列车灯投影光学系统。首先,根据车灯投影的应用需求,进行了倾斜像面的投影光学系统设计以及热效应和公差分析。然后,针对倾斜投影导致的梯形畸变和照度不均匀问题,提出了图像校正方法,并进行了实验验证。本设计简化了车灯投影系统结构,实现了畸变小、照度均匀的地面投影图像显示。
2 投影系统结构及其工作原理
本文设计的Micro LED 车灯投影系统结构如图1 所示,系统主要由Micro LED 显示光源和投影物镜构成。通过在蓝光Micro LED 阵列上涂覆黄色量子点进行色转换实现白光显示,再采用图像处理算法对Micro LED 阵列芯片的显示图像进行校正以减小畸变并改善照度均匀性,最后,通过投影物镜在地面相应区域实现投影图像显示。
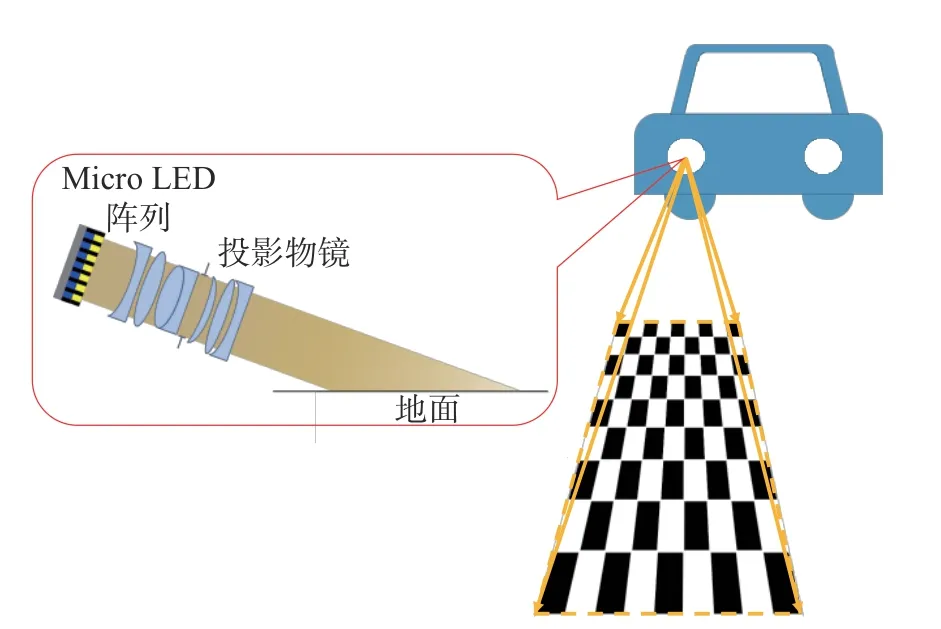
图1 Micro LED 车灯投影系统结构示意图Fig.1 Schematic diagram of Micro LED headlight projection system
3 车灯投影系统参数设计
3.1 Micro LED 阵列光源参数设置
Micro LED 阵列的参数主要包括亮度、像素尺寸及像素数量等。Micro LED 的发光性能受到尺寸效应的影响[13-14]。在相同像素数量下,总光通量随着像素尺寸的增加而增大,但同时光学系统的体积也随之增大 。为此,综合考虑车灯投影系统的体积、投影面积、投影距离、像面照度以及图像分辨率等因素,最终确定以像素尺寸为80 μm×80 μm,像素数为200×150,发光面积为16 mm×12 mm 的白光Micro LED 阵列作为投影车灯的显示光源。按照白光Micro LED 阵列亮度为5×106cd/m2[15-16]计算,则光源总光通量超过2 000 lm,满足国家相关标准对照明车灯的亮度要求。车灯投影系统的Micro LED 阵列参数如表1 所示。

表1 车灯投影系统Micro LED 阵列参数Tab.1 Parameters of Micro LED arrays for vehicle headlight projection system
3.2 投影物镜参数设计
根据车灯投影系统的应用需求,确定投影物镜的设计参数。首先,根据图2 中的车灯安装位置和投影范围的几何关系,确定投影物镜在YOZ面的视场角 ωv为16°,在XOY面的视场角ωH为34°。
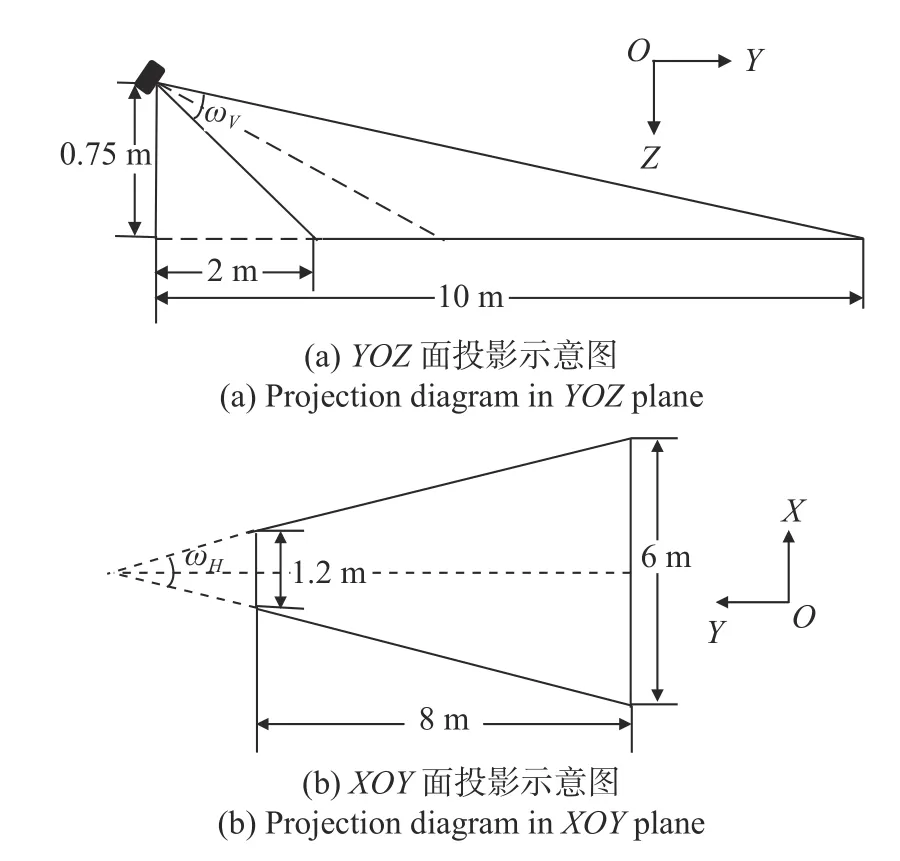
图2 车灯投影示意图Fig.2 Schematic diagram of headlight projection
然后,根据Micro LED 阵列尺寸、投影物镜的视场角及图3 所示的投影关系,通过公式(1)计算光学系统焦距:

图3 投影关系示意图Fig.3 Schematic diagram of the projection relationship
式中y为阵列对角线长度,f′为焦距,y′为投影图像对角线长度,l′为投影距离。可得光学系统焦距为40 mm。
投影物镜的Nyquist 频率和F数可由Micro LED 的像素尺寸、亮度参数和像面照度等计算得到。设Nyquist 频率为p,投影像面的像素周期长度为a,则有:
而F数需要根据像面照度确定。根据照度学理论,光学系统的像面中心照度E′可表示为:
其中φ′是像方光通量,s′是像方像元面积,τ为光学系统透过率,L为Micro LED 阵列的亮度,L′为像方亮度,u′为像方孔径角。由拉赫不变量nyu=n′y′u′可知:
其中u为物方孔径角,n和n′分别为物方、像方折射率,β为放大倍率。故sinu′与系统F数的关系可表示为:
其中D为入瞳直径。因此,像面照度E′与F数的关系可表示为:
设光学系统透过率τ=0.5,一般机动车的路面光照度值为 8~25 lx[17],取车灯投影物镜倾斜后光轴处的照度为10 lx,此时,投影物镜的放大倍率β=200,由式(6)可得F≤2.19,设计时取F=2,以保证系统的光通量和分辨率。最终得到的投影物镜关键参数及设计指标如表2 所示。

表2 投影物镜的关键参数及设计指标Tab.2 Key parameters and design specifications for projection objective
4 光学系统设计及分析
4.1 车灯投影光学系统设计
根据Micro LED 阵列和投影物镜的设计参数,对车灯投影光学系统进行优化设计。将Micro LED 阵列显示芯片作为像面,结合远心光路进行设计,系统光路如图4(彩图见期刊电子版)所示,系统成像质量分析如图5(彩图见期刊电子版)所示。从设计结果可以看出,系统Nyquist 频率处的MTF 高于0.9,最大畸变量为2%,相对照度大于90%,具有良好的成像质量。
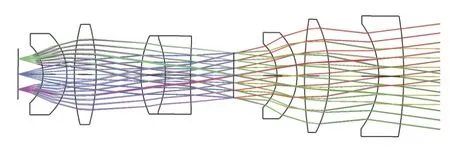
图4 车灯投影系统光路图Fig.4 Optical path diagram of the vehicle headlight projection system

图5 光学系统成像质量评价分析图Fig.5 Evaluation of the imaging quality of the optical system
针对因车灯投影系统倾斜像面导致的MTF下降问题,对光学结构进行优化。沙姆定律[18]指出,当物面、像面以及透镜所在平面三者的延长面相交于某一条直线时,在像面上可以得到清晰的像。图2 的系统光轴与路面间的倾斜角为12°,在光学设计软件中将系统的物面设置为倾斜面,将物面倾斜角度、镜片曲率半径和厚度等参数设置为变量,进一步优化光学系统得到车灯投影光学系统光路图,如图6 所示,优化后的物面倾斜了3.3°。图7(a)和7(b)分别为优化前后的MTF 曲线,从图中可以看出,优化后的系统在Nyquist 频率处的调制传递函数大于0.6,与优化前相比有了显著提高。
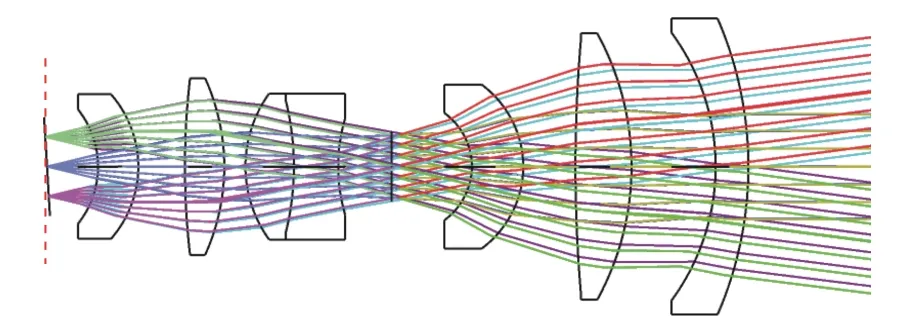
图6 优化后的车灯投影光学系统光路图Fig.6 Optimized optical path diagram of the vehicle headlight projection optical system

图7 物面倾斜优化前后MTF 曲线Fig.7 MTF curves before and after object plane tilt optimization
4.2 光学系统热分析
式(7)和式(8)分别给出了光学元件参数与温度的关系:
式中r、l、d及 αg分别为光学元件的曲率半径、间隔、厚度及热膨胀系数,nα和n0分别为空气折射率和元件折射率。这些参数随温度将发生变化,这直接影响系统的成像质量[19-20]。
通过光学设计软件对车灯投影光学系统在-20 °C~80 °C 温度范围内的成像质量进行分析。图8(a)和8(b)(彩图见期刊电子版)给出了系统在不同温度下的子午视场和弧矢视场的MTF 值。

图8 不同温度下系统各视场的MTF 图Fig.8 MTF diagrams for each field of view of the system at different temperatures
从图8 可以看出,在该温度范围内,相同视场下的子午和弧矢MTF 值浮动均小于0.2,且各视场在Nyquist 频率处的MTF 值均大于0.6,说明系统在-20 °C~80 °C 温度范围内具有较好的成像质量。
4.3 公差分析
公差分析主要考虑加工装配等公差对光学系统性能的影响。根据表3 给出的系统公差,采用后焦距作为补偿量,使用蒙特卡罗方法计算200 个样例在Nyquist 频率处的平均衍射MTF 分布,结果如表4 所示。分析结果表明,系统公差样本的平均 MTF 值可达0.680,系统公差敏感度较低,具有可加工性。

表3 系统公差表Tab.3 Table of system tolerance parameters

表4 光学系统公差分析结果Tab.4 Tolerance analysis results of optical system
5 图像分析校正与实验验证
5.1 畸变分析及校正
倾斜像面成像光学系统由于各视场的放大倍率不同而产生梯形畸变,仿真得到的车灯投影光学系统网格畸变如图9(彩图见期刊电子版)所示。梯形畸变的数学模型如下:
式中r为半径,r2=x2+y2;(x′,y′)为畸变图像坐标;(x,y)为原图像坐标,p1、p2为梯形畸变系数。
本文采用输入图像预校正方法实现梯形畸变的校正。根据车灯投影系统的畸变特性,对Micro LED 显示图案进行预校正后再进行投影显示。
首先分别提取图10 所示的原始输入图像与原始输出图像中对应的4 组顶点坐标 (xi,yi)和(xi′,yi′)(i=1,2,3,4),建立坐标映射关系。将得到的8 个顶点坐标代入公式(10)中,求解出矩阵M=[m1,m2,m3,m4,m5,m6,m7,m8,1]T。

图10 图像对应控制点Fig.10 Corresponding control points in the image
然后,对矩阵M进行逆变换得到矩阵N=[n1,n2,n3,n4,n5,n6,n7,n8,1]。由已知原始输入图像的点坐标(xj,yj),通过公式(11),即可求出校正后输入图像对应的点坐标(uj,vj):
通过矩阵N对原始输入图像进行校正,再将校正后的输入图像通过车灯光学系统进行投影,即可得到校正效果良好的校正输出图像。校正流 程如图11 所示。

图11 直接投影流程及畸变校正投影流程图Fig.11 Flow charts of direct projection and distortion projection
5.2 照度不均匀性分析及校正
倾斜像面车灯投影光学系统在产生梯形畸变的同时也会引起像面照度分布的变化。本文通过单独调制输入图像各像素的灰度,实现投影面的照度不均匀性校正。
将亮度均匀的图像输入系统以分析像面的照度分布,图12(a)(彩图见期刊电子版)为投影面的照度分布三维图,图12(b)为y轴中心坐标处截取的照度分布截面图。
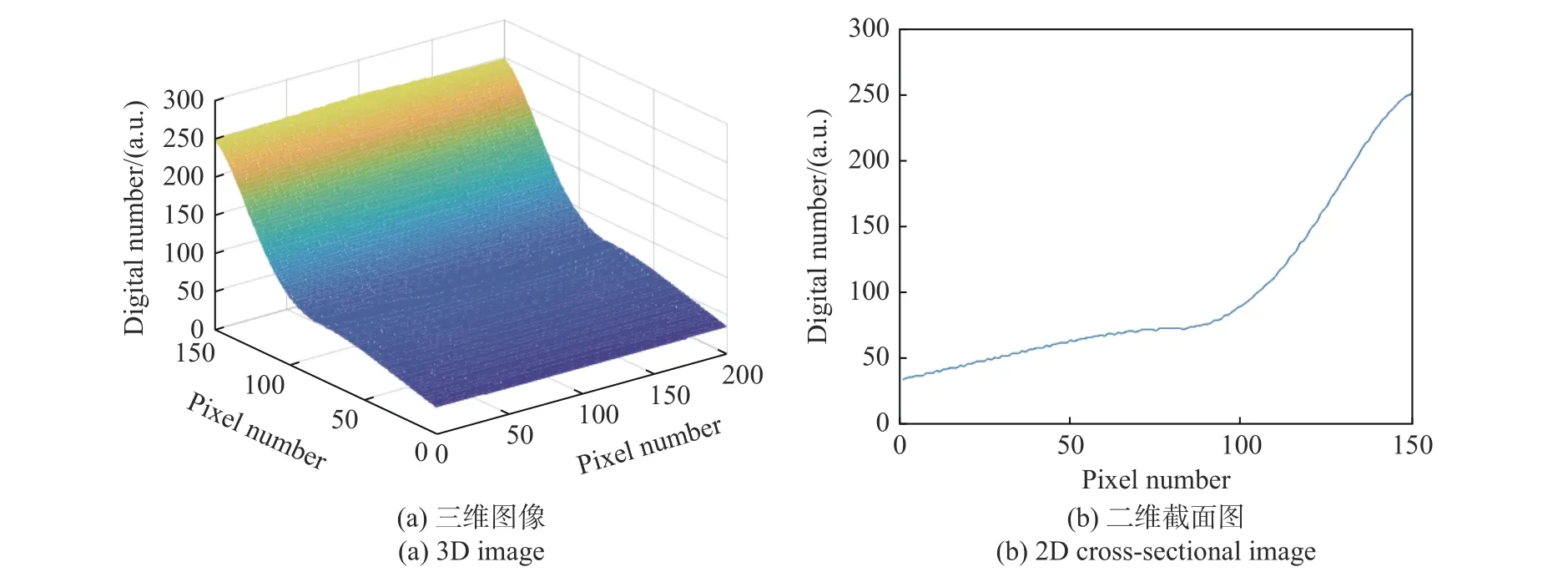
图12 模拟图像的照度分布Fig.12 Illumination distribution of the simulated images
在倾斜投影的情况下,不同投影距离处的像面照度随投影距离增加而降低。
对于物方远心的垂直投影光学系统,像面上某一点的照度f(G)如式(12)所示:
式中L(G)为该点在物面上共轭点的亮度,与输入图像的灰度值G相关;ω为主光线与光轴的夹角;u′为中心视场的孔径角。像面倾斜后,照度分布发生改变,通过对像面上各像素点的照度附加修正因子aij,可得到倾斜投影系统的照度分布矩阵E。修正因子通过倾斜前后每点的像面照度变化关系得到。
为校正投影像面照度的不均匀性,根据输入灰度G和像面照度E的函数关系反向推导当投影像面照度均匀时输入图像的灰度矩阵。设校正后像面照度为EG,此时Micro LED 阵列的输入图像的灰度矩阵G0可以用式(14)表示。利用矩阵G0对Micro LED 阵列的输入图像每个像素的灰度进行调制,即可实现像面照度的非均匀校正。
5.3 实验验证
搭建了投影实验平台对系统梯形畸变及照度不均匀性校正方法进行验证。实验平台由Micro LED 投影系统和电脑控制端两部分组成,通过将投影模块倾斜一定角度模拟车灯投影。
用该系统对图13(a)所示的原始输入图像进行投影,得到如图13(b)所示的原始输出图像。从图中可以看出,成像面存在较为明显的梯形畸变和照度不均匀的问题。
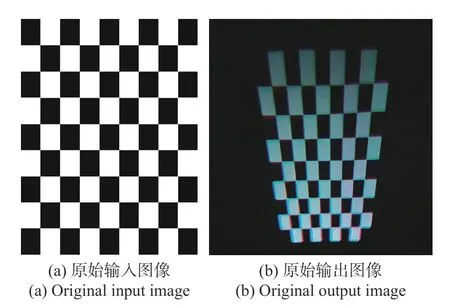
图13 校正前投影图像Fig.13 Projected image before correction
采用上述畸变校正方法对图13(a)中的原始输入图像进行算法处理,得到图14(a)所示的校正输入图像。根据照度校正方法,对Micro LED 阵列的每个像素的灰度进行调制后,再次通过投影镜头进行成像,得到校正输出图像,如图14(b)所示。
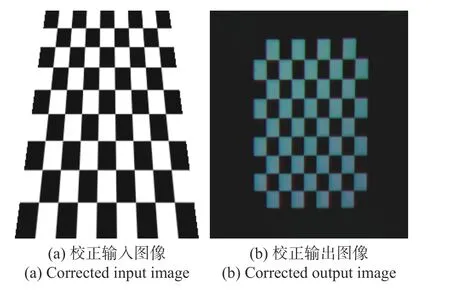
图14 校正后投影图像Fig.14 Projected image after correction
拍摄原始输出图像及校正输出图像,并通过标定[21-23]得到校正前后图像的梯形畸变系数。相机标定结果见图15。可见,校正后图像的梯形畸变系数p1,p2分别从0.093 2、0.368 0 下降至0.083 5、0.037 3。结果表明该校正方法实现了像面倾斜车灯投影系统梯形畸变的有效校正,能够满足车灯投影系统的应用需求。
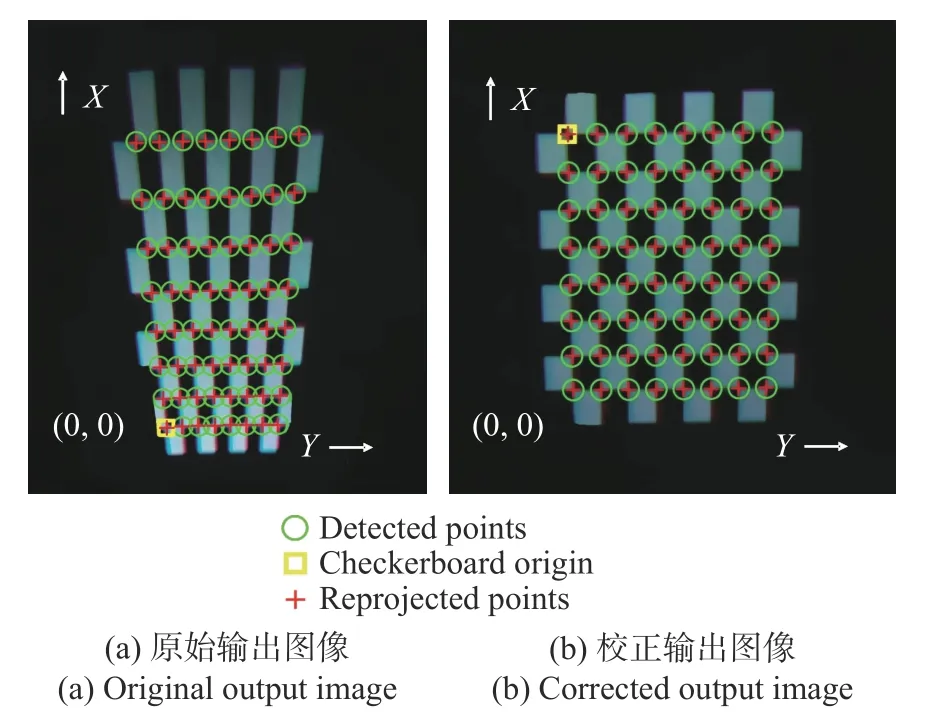
图15 相机标定分析Fig.15 Camera calibration analysis
对原始输出图像及校正后的输出图像的照度均匀度进行分析,结果如图16~图17(彩图见期刊电子版)所示。

图16 原始输出图像的照度分布Fig.16 Illumination distribution of the original output image

图17 输出图像的照度分布校正结果Fig.17 Correction results of the illumination distribution of the output image
利用公式(15)的照度均匀度计算公式,可得到校正前后两幅图像的照度均匀度:
其中:N%为像面照度均匀度;n为取样点个数;Emax为最大光照度;Emin最小光照度;Ei为取样点的光照度。
通过上式计算得到校正前后的像面照度均匀度分别为83.2%和93.2%。结果表明,本文提出的方法使投影图像的照度均匀性得到明显改善,满足车灯投影显示的应用需求。
6 结论
本文基于Micro LED 的自发光、高亮度、小尺寸等优点,以阵列像素尺寸为80 μm×80 μm,像素数为200×150,阵列发光面积为16 mm×12 mm的白光Micro LED 阵列作为显示光源,设计了全视场角为16°×34°,焦距为40 mm,F数为2 的车灯投影光学系统。采用物面倾斜与光学结构优化相结合的设计方法,有效避免了因像面倾斜导致成像质量下降的问题,使系统在Nyquist 频率处调制传递函数提高到0.6 以上。同时,根据工作环境的温度范围,分析了车灯投影光学系统在-20 °C~80 °C 范围的成像质量。结果表明,系统在该温度范围内具有良好的光学性能。此外,对车灯倾斜投影产生的像面梯形畸变及照度不均匀问题进行了分析,结合相应的图像校正方法进行实验验证。实验结果表明:校正后图像的梯形畸变系数p1,p2分别从0.093 2、0.368 0 下降至0.083 5、0.037 3,像面照度均匀性从83.2%提高到93.2%。综上所述,像面畸变和照度均匀性得到了明显改善,满足车灯投影系统的应用需求。
猜你喜欢
科普童话·学霸日记(2021年11期)2021-05-30
华人时刊(2019年13期)2019-11-26
摄影之友(影像视觉)(2017年10期)2017-11-07
重庆文理学院学报(社会科学版)(2017年2期)2017-05-03
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
铁道通信信号(2016年5期)2016-06-01
汽车科技(2014年6期)2014-03-11
癌变·畸变·突变(2014年2期)2014-03-01
癌变·畸变·突变(2014年6期)2014-02-27
