工厂化水产养殖微滤机故障诊断系统
2024-02-05 07:25肖瑞超
安徽农学通报 2024年2期
肖瑞超
(河南工业贸易职业学院,河南郑州 451191)
工厂化水产养殖是利用现代化的生产技术和设备,集电子技术、自动化和智能化等现代手段,将传统养殖方式转变为现代化的、集约化的方式,在半封闭或全封闭的条件下,对养殖生产全过程进行自动化管控的一种生产模式[1]。工厂化水产养殖过程中的水体污染和维护成本是行业当前面临的主要挑战之一[2]。在工厂化水产养殖中,养殖水体的废物主要由残饵、排泄物和次级代谢物等组成[3],排泄物、残饵和生物团等悬浮物和固体物,增加了养殖水体的浑浊度,容易造成生物滤器堵塞,影响系统的性能和水产健康养殖。微滤机是工厂化水产养殖过程中不可缺少的设备之一,能够有效地改善水质和养殖环境,保障养殖水产的安全。微滤机结构复杂,其在运行中常会出现诸如噪声大、温度过高、滤网堵塞等各种故障,对其正常运行以及提高生产效率和经济效益都有较大影响[4]。如何准确、快速地对这些故障进行诊断和解决,是工厂化水产养殖微滤机研究的重要方向之一。为保障水产养殖的正常运行,提高工厂化水产养殖微滤机的运行效率和安全性,本研究设计了工厂化水产养殖微滤机故障诊断系统,并构建了基于经验熵决策树的模型,实现了微滤机故障的快速诊断,为工厂化水产健康养殖提供参考。
1 微滤机类型及工作原理
微滤机又称固体颗粒分离器[5],是一种利用微孔滤材对水体进行过滤和净化的设备,主要由滤材、进水口、出水口、反冲洗装置和管道等部分组成。
1.1 微滤机的类型和作用
养殖废水处理技术,特别是固体悬浮物的处理,主要有物理、生物和化学等类型的处理方法[6]。其中,应用微滤机处理固体悬浮物属于物理类型的处理方法。微滤机的主要类型有转鼓式、转盘式、格栅式和履带式等[7-8]。
目前,转鼓式微滤机应用较广泛,适用于分离液体中的微小悬浮物质,分离固、液两相。转鼓式微滤机主体工作部件是转鼓,由传动装置、高压反冲洗装置、支撑框架、覆盖于框架上的滤网和中心轴构成,结构如图1所示[9]。其滤网是由不锈钢材料的外滤网和尼龙材料的内滤网组成的双层网。转鼓式微滤机按照不同的分类方式可以分为不同的类型[9](表1)。

表1 转鼓式微滤机类型

图1 微滤机结构示意
转鼓式微滤机与其他固液分离方法的不同之处在于过滤介质空隙小,在筛网回转的离心力作用下,借助较低的水力阻力,能高流速截留住悬浮固体,耗能低、使用和维护方便、占地少和适用性强。转鼓式微滤机具有通用性好、自动化程度高、需要劳动力少、水头损失低、维护容易和占地空间小等优势。其缺点为需要高压水射流冲洗,耗能大;处理效率低、成本高;使用过程中易造成大颗粒的二次破碎产生的大量微小颗粒,会降低精过滤和生物处理的效率等[10]。
微滤机的主要作用有去除残饵、粪便、悬浮物、泥沙、藻类、生物黏泥、色度和异味等,从而提高养殖水体的质量和纯度。
1.2 微滤机的工作原理
目前转鼓式微滤机应用较为广泛,其工作原理为养殖水体从进水口进入转鼓内,通过安装在转鼓表面的滤网进行过滤,固体颗粒物被滤网截留,均匀地分布在反向旋转的滤筒的滤网上,经过滤后的干净水从出水口流出[10]。当滤网上的污物聚集到一定数量时,会引起滤网透水量下降,导致水位上升。水位上升到设定的高水位时,为防止筛网堵塞,滤筒外设置的高压反冲洗装置、液位自动控制感应系统、反清洗水泵和电机同时开启,进行自动反清洗,在高压水射流扇形喷射下疏通滤网。堵塞在滤网上的悬浮物在高压水的冲洗下,流入污物收集槽再经排污管排出。滤网清洗干净后,透水量上升,水位下降,当水位降至设定的低水位时,液位自动控制系统再次感应,反清洗水泵和电机停止工作。目前国内工厂化水产养殖系统中,转鼓式微滤机普遍使用120 目滤网[7]。在大多数微滤机装置中,一旦固体物堵塞过滤网,滚筒即开始转动,高压喷射水(从滚筒的外侧)将这些固体物冲入收集槽中。
转鼓式微滤机的过滤性能与转鼓上的滤网孔径大小有着直接的关系,其处理效率由滤网数量、滤网孔径、反冲强度、颗粒含量和水力负荷率等参数决定。但是滤网孔径并非越小越好,孔径越小就越容易发生堵塞,反冲洗频率也就越高,电耗和水耗就会随之增加,使得微滤机的经济性变差[9]。
1.3 微滤机常见故障原因
微滤机的故障原因有很多方面,较为常见的有以下几个方面。(1)微滤机清洗不当。微滤机使用过程中,需要经常进行清洗,如果清洗不当,易导致滤材受损或堵塞,进而影响过滤效果。(2)滤网孔堵塞。微滤机的滤网孔径较小,易被杂质和微生物堵塞,导致滤网压力过大,系统运行出现异常。(3)排污管堵塞。微滤机中的排污管也易被杂质和微生物堵塞,导致无法正常地排污。(4)电源异常。微滤机电源异常或电压波动时,可能会导致微滤机出现故障。(5)管路连接不当。微滤机进水和出水口、管道连接不当,也易导致微滤机工作时出现异常或漏水等情况。(6)传感器损坏。微滤机中的传感器故障,如水位、压力和温度等传感器故障,会导致微滤机无法正常工作。微滤机故障会导致水中的固体颗粒物增加,从而降低溶解氧的浓度,影响水产的正常生长,可能造成较大经济损失,因此,有必要对微滤机的故障进行快速诊断、快速决策,以降低经济损失。
2 微滤机故障诊断系统构建
微滤机的故障原因有很多,为建立一套全面可靠、能够诊断多种故障的诊断系统,本研究设计了工厂化水产养殖微滤机故障诊断系统。该系统主要包括工作微滤机、备用微滤机、监测模块、调度模块和总控模块,微滤机故障诊断系统结构如图2所示。
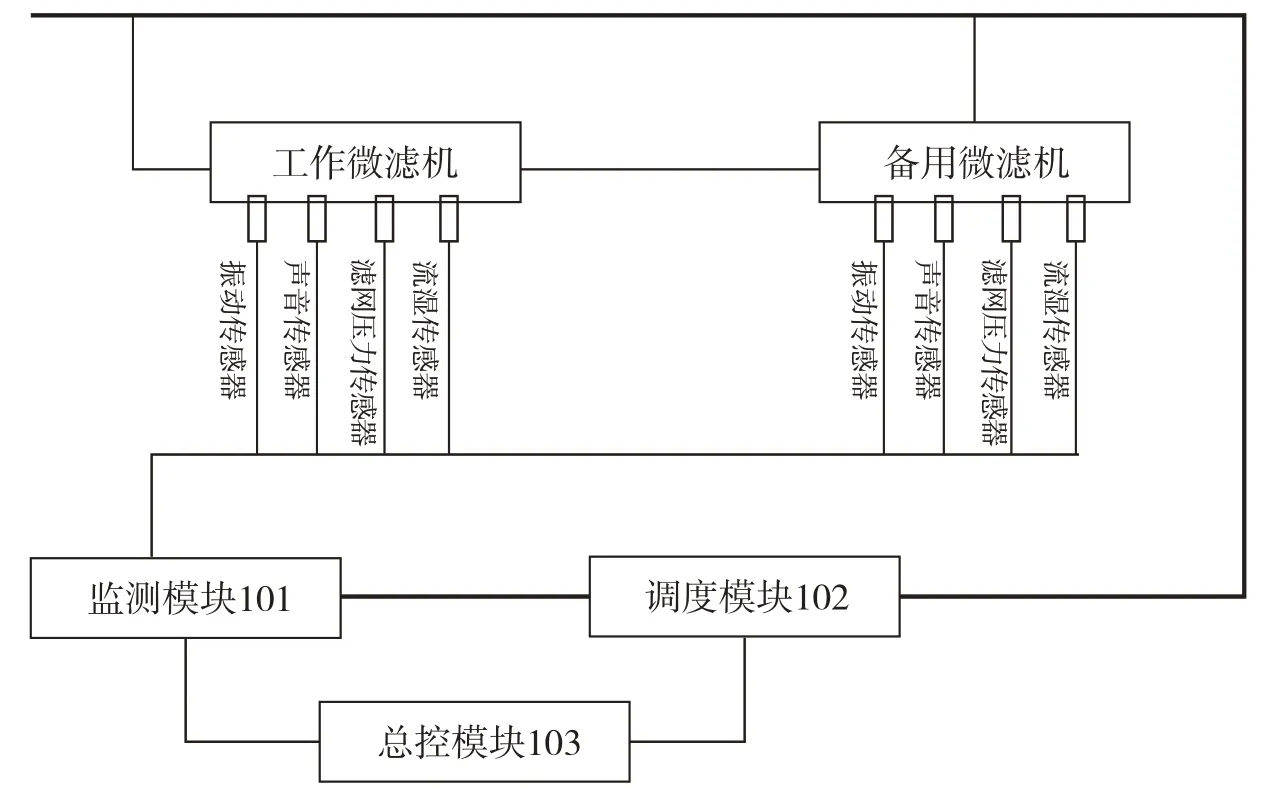
图2 微滤机故障诊断系统结构
2.1 监测模块
监测模块包括第一计算机,多个参数传感器,转换接口及第一数据信号通路。参数传感器安装在工作微滤机的不同位置,用于采集工作微滤机不同部位的滤网压力、振动、声音和电压等监测数据,监测数据通过数据信号通路传送至转换接口,转换接口将监测数据格式转换后发送至第一计算机,使用经验熵决策树算法对监测数据进行处理,得到分析结果进行保存或生成微滤机切换命令,将处理后获得的异常结果传送至调度模块,并将全程状态发送至总控模块。
通过监测模块下管理的各参数传感器,实现对故障诊断所需数据的全面采集,便于进一步进行经验熵决策树过程分析,为整体系统的故障诊断过程建立基础。
2.2 调度模块
调度模块包括命令接收发送器和接口控制器;命令接收发送器用于接收第一调度命令或第二调度命令,并将所执行的第一调度命令和第二调度命令进行反馈;接口控制器,与命令接收发送器连接。调度模块主要用于实施第一调度命令或第二调度命令的命令,将工作微滤机切换至备用微滤机。
该系统通过调度模块实现微滤机切换操作,当工作微滤机发生故障时,由调度模块根据命令进行具体切换。该单元可以由单片机加控制器实现。
2.3 总控模块
总控模块包括第二计算机、接口选择控制器及第二数据信号通路。第二计算机中安装系统数据库,系统数据库对工厂化水产养殖微滤机故障诊断系统的运行状态进行记录;接口选择控制器用于实现命令的转换及切换微滤机;第二数据信号通路用于第二计算机和接口选择控制器间的数据传输。总控模块用于对监测模块和调度模块的运行状态进行记录,并向调度模块发送第二调度命令。该系统通过总控模块对系统整体过程进行记录,并进行必要的人工干预。
3 经验熵决策树模型构建
该系统通过监测微滤机各传感器参数的故障数据得到最终的经验熵决策树模型,并使用此模型进行故障的快速定位及原因分析。
3.1 经验熵决策树概述
决策树是一种常用的分类和回归算法,在众多的机器学习算法中占有重要地位。决策树就是将数据分为类别、回归或其他分组的模式,其结构形象生动,有很好的可解释性和易理解性,可以有效地对一组数据进行分类和预测。决策树的主要构造包括根节点、中间节点和叶节点。其中,根节点是决策树的起点,其代表了整个数据集合;中间节点代表分支,其将数据集合分成若干个子集合,并对应不同的属性和属性值;叶节点代表分类结果,每个叶节点对应一种类别或回归值。
经验熵决策树主要功能是利用经验熵决策树算法对微滤机的各项参数进行分析和建模。经验熵决策树是一种基于信息熵的决策树算法,通过计算每个特征值对应的信息增益来确定最优的分裂点,并递归构建决策树。本研究将经验熵决策树算法应用于微滤机故障诊断中,利用微滤机运行过程中的各项参数来构建故障诊断模型。
3.2 经验熵决策树模型构建步骤
传感器监测的各参数实时数据,通过数据通路传输给转换器,监测模块基于经验熵决策树获得故障诊断的结果,通过使用转换后的传感器参数,进行故障的诊断与分析,如果结果正常,则保存;如果结果出现异常,则发送调度命令并保存。
构建经验熵决策树模型,确定计算决策树时各内部结点的经验权值,以及各决策因子项的经验比重。经验权值总和为1,不同情况下的经验因子不同,如微滤机异响较大时,经验因子可以设为声音0.4,振动0.2,滤网压力0.2,温度0.1及电压0.1,其总和为0.4+0.2+0.2+0.1+0.1=1,该因子是根据经验所得,可以根据不同的故障类型选择不同的数值,数值的不同会影响决策树的收敛速度。
基于经验熵的决策树模型,通过搭建算法详细模型,确定分层的深度和最终结构。通过已有的故障数据对经验熵决策树进行测试、训练和验证,使用计算机格式数据进行系统分析。基于经验熵决策树的模型构建过程及步骤如图3所示。

图3 经验熵决策树构建步骤
(1)根据已有的故障数据,建立数据集,并将数据集分为测试集、训练集和验证集。
(2)对故障数据集进行集中化预处理,剔除异常数据,供建立经验熵决策树模型使用。
(3)构建基于经验熵的决策树初步模型,并用测试集对模型进行初步测试,以验证模型的合理性。
在构建决策树的某结点时,要在该结点的传统计算熵前乘一个经验因子,以调整该结点的权重,由此进行故障的分类。传统的决策树模型的权重:决策树结点权重=计算熵。基于经验熵决策树的权重:经验熵决策树结点权重=经验因子×计算熵。将二者进行对比可以发现,基于经验熵决策树的模型节点权重构建更加合理,而决策树结构的不同,会影响故障诊断的准确程度,基于经验熵的决策树准确度更高。
经验因子需要不断调整,以取得较优的决策树结点,该因子主要有两个方面的作用:加速决策树的收敛,通常情况下,技术人员在积累了大量经验的前提下,可以通过某一方面的原因迅速确定故障,该原因此时所占的决策比重大于其他原因的比重,而经验因子所扮演的就是这个角色,可以调整权重来迅速让决策树收敛;提高特定情况下的准确率,同一组数据,不同的经验因子,可以形成结构完全不同的决策树,而不同结构的决策树,其准确程度不同,在微滤机的特定情形下,经验熵决策树准确度要高于传统的决策树。
(4)通过已经构建的经验熵决策树模型,利用训练集对模型进行训练,并对模型进一步调整,通过不断的调整经验因子,得到最优的经验熵决策树模型。
(5)得到最终的经验熵决策树模型,并利用验证集对模型进行综合评价,验证通过后将该模型投入运行。
基于经验熵决策树模型的创建,通过各传感器监测的参数实时数据得到所需数据集,再将数据集分为测试集、训练集和验证集,分别对初始模型进行合理性测试、模型训练及最优模型验证;通过模型构建过程和步骤,并对经验因子进行调整分析,根据不同的故障类型可以调整不同经验因子的值,最终得到较优模型。
4 结语
综上,本研究在现有微虑机及故障诊断系统基础上,研究设计了工厂化水产养殖微滤机故障诊断系统,该系统包括监测模块、调度模块及总控模块,实现了系统的完整控制,在对系统精准控制的同时,实现了故障诊断的自动化和智能化,可对故障进行快速定位及可能性原因的分析。该系统实现了微滤机故障诊断的自动化、智能化及故障的快速定位,保障了养殖水产的安全,降低了运行成本,提高了经济效益。
猜你喜欢
设备管理与维修(2023年13期)2023-08-29
云南冶金(2022年1期)2022-03-09
纺织报告(2019年9期)2019-10-30
成都信息工程大学学报(2019年3期)2019-09-25
电子制作(2018年16期)2018-09-26
中国核电(2017年3期)2017-11-20
中央民族大学学报(自然科学版)(2016年4期)2016-06-27
CHIP新电脑(2016年2期)2016-02-26
中国当代医药(2015年33期)2015-03-01
郑州大学学报(医学版)(2015年1期)2015-02-27