高速铁路动静态轨检数据里程对齐与误差修正
2024-02-04 12:56马玉松李晨钟俞伟东吴维军
铁道学报 2024年1期
何 庆,马玉松,李晨钟,俞伟东,吴维军,王 平
(1.西南交通大学 高速铁路线路工程教育部重点实验室,四川 成都 610031;2.西南交通大学 土木工程学院,四川 成都 610031;3.中国铁路呼和浩特局集团有限公司 集宁工务段,内蒙古 乌兰察布 012000;4.南昌大学 机电工程学院,江西 南昌 330031)
轨道不平顺是轮轨系统的重要激扰源,直接影响列车运行的安全性、平稳性和舒适性[1]。因此,轨道不平顺的精确检测是保障铁路运输安全的重要基础。轨道不平顺检测方式根据轨道是否承受轮载分为有轮载的动态检测和无轮载的静态检测[2]。动态检测中高低、轨向的检测原理为惯性基准法;而静态检测中高低、轨向的检测原理则为弦测法[3]。动态检测设备以轨道检查车或综合检测列车(轨检车)为主,具有速度快、效率高、项目全等优点,但时常发生轮轨间相对滑动、车轮空转、检测信号缺失等系统性故障,使检测所得的数据存在沿线路整体不均匀分布的里程误差。静态检测设备以轨道检查仪(轨检仪)为主,轨检仪虽然检测速度慢,但可以弥补轨检车的上述缺点,且检测精度高。两种检测方式优势互补,工务部门综合使用这两种检测设备定期从轨道上收集大量数据以监测其几何状况。这些数据可用于几何不平顺超限的预测并实现更精确的养护维修策略,进而从对轨道设备进行定期检查的“计划修”转变为依据轨道状态及维修历史的“状态修”[4-5]。但前提条件是不同检测数据间具有可比性,即消除不同检测频次间的里程误差。
动态检测数据因轨检车的定位精度受车体运行状态、车载定位设备精度等多种因素的共同影响,里程误差沿整条线路广泛分布并随着里程增大存在误差累积[6-7]。当前研究[8-9]中将里程误差分为绝对位置误差(absolute position errors, APEs)和相对位置误差(relative position errors, RPEs)。绝对位置误差是根据线路设计资料中的绝对里程位置信息作为参考基准,以此来对现场检测数据进行里程修正;相对位置误差则是指定某次的检测数据作为参考基准,以此来对其他时间的检测数据进行里程修正。
在铁路轨道检测数据里程误差绝对修正的研究中,隋国栋等[10]提出利用优化理论方法实现曲线全区段的有效匹配,进而实现里程误差的统计与修正;李文宝[11]和汪鑫等[12]提出利用线路设计资料中的曲线信息(直缓点、缓圆点、圆缓点、缓直点)作为里程修正的基准点,以此实现对里程误差的进一步控制;Xu等[9]提出根据线路中的关键设备信息来获取轨检车的运行位置,进而校准检测数据的里程位置;汪振辉等[13]提出通过获取线路铺设过程中的焊缝位置信息与现场检测数据中提取的焊缝位置信息进行匹配,从而实现对现场检测数据的里程误差修正。在相对里程误差的研究中,大多是任选某次的检测数据作为参考基准,利用最小二乘法[14]、灰色关联度[15]、动态时间规划[16]、插值法[17]等算法处理不同时间检测数据间相同检测指标的关系,进而确定两次检测数据间的相对偏移量,即里程误差。
但上述研究存在如下不足:线路设计资料中的里程位置信息在线路实际运行中可能受施工精度、列车动荷载、轨下基础条件变化等因素影响而发生改变[10-12];现场实际检测数据与线路设计数据的匹配效果劣于两者均为实测数据的匹配效果,且可能会出现匹配结果发生错位的情况[13]。上述问题属于算法中存在的系统误差,均会造成绝对里程误差修正不准的情况。而在相对里程修正中,随机选取的作为参考基准的动检数据本身就存在一定程度的里程误差,如此可能会造成后续待修正数据被错误修正,出现数据波形失真等情况。
本文以静态检测数据作为参考基准,利用其精度高、可靠性强、更能反映线路真实里程位置信息等特点,可有效避免其他方法中存在的系统误差且匹配效果更佳。本文提出的组合修正方法有效结合互相关函数(cross-correlation function, CCF)和动态时间规整(dynamic time warping, DTW)各自的优点,实现动、静态检测数据波形的严格对齐和有效匹配,进而完成动态检测数据的里程误差修正并尽可能地解决了里程误差随机分布并随着检测里程的增加而累计的问题。
基于精度高、误差小的静态检测数据,可快速定位不平顺指标临限位置以及轨道几何条件的有效评估,为探究轨道不平顺演变规律、深入研究动静态不平顺关系和制定准确可靠的养护维修策略提供了研究基础。
1 轨道静态几何检测数据库
静态检测数据单次检测范围较短,一般在1.5~2.5 km,同一条线路一年内会在不同位置进行多次静态检测。因此,轨道动、静态几何检测数据实现有效匹配的第一步是建立轨道静态几何检测数据库,即将历次使用轨检仪所测得的轨道静态检测数据进行合并、处理并存储,从而得到连续的静态检测数据。
轨道不平顺各指标的检测数据反映线路的几何状态,因线路相同位置的几何状态的一致性可以得到不同检测时间的轨道不平顺指标在空间上的检测数据波形相似性。本文对我国某高速铁路在2020年间的静态检测数据进行整理并作为基准数据集,利用轨检车所测得的动态检测数据作为待匹配数据集。
2 可行性分析
由于动、静态两种检测方式的检测设备、检测原理、数据处理系统等均存在差异,若要选用静态检测数据作为动态检测数据里程误差修正的参考基准,则必须对两种数据的相关性进行验证,证明该方法的可行性与合理性。
为了更清晰地反映修正效果,本文首先通过观察选取动、静态检测数据原始波形相似性最高的不平顺指标初步拟定为里程修正算法的验证数据,各指标波形相似性对比见图1。由图1可知,高低数据和轨距数据的动、静态波形相似性明显优于其他指标,故选取这两项指标进行里程修正,并做进一步的验证。

图1 各指标波形相似性对比
图1数据来自我国某新开通运营的有砟高速铁路,其展示的部分动静数据波形对比结果与现有不平顺动静关系的经验结论存在一些差异,出现这种情况的原因可能与不同线路轨下基础条件、开通运营时间等因素有关,是不同线路间所表现出的波形差异,该差异并不会影响本章节的可行性分析和本文里程误差修正结果。关于不同线路间动静态检测数据关系的差异以及动静关系随时间的演变规律可在后续工作中进行详细介绍和深入探究。
虽然图1中所反映的原始波形可以看出两指标的动静波形具有高度相似的变化规律,但仍存在部分干扰数据使波形局部位置出现突变。因此利用滑动平均函数进行原始数据预处理,使得检测数据波形更加平滑,在此基础上,再利用Pearson相关系数ρxy对动、静检测数据进行相关性计算,即
(1)
式中:x、y分别为动、静态检测数据;Sx、Sy分别为动、静态检测数据的标准差;Cov(x,y)为动、静态检测数据的协方差。ρxy的计算结果见表1。

表1 不同窗长条件下的相关系数
在统计学中,相关系数用来表征两个随机变量序列之间的相关程度,其具体关系为
(2)
由上述计算结果可知,通过改变滑动窗口的大小,高低指标的动、静态检测数据之间计算所得的相关系数为0.57~0.60,属于显著相关;而轨距指标的两种检测数据的相关系数均大于0.92且可达到0.96以上,根据式( 2 )的规定,相关系数大于0.8即可判定两个变量间为高度相关。高低指标相关性偏低,应是动、静态检测过程中轨道结构不同的受力情况及检测方法不同等多种因素共同导致的[18],受行车轮载的影响可能会造成两种检测方式的刚度不平顺存在差异;而检测原理及检测系统的不同,同样会造成检测数据在数值上的差异;另外,本文所选线路为有砟线路,有砟轨道在行车荷载作用下表现出不同的轨枕状态和纵横向阻力同样会导致轨检数据不同指标间的差异[19]。轨距指标则受上述影响并不显著,尤其是刚度不平顺的差异对轨距指标的影响较小。甚至在轨道平顺性状态极好的条件下,轨距的动、静态检测结果可以互相代替[20]。
综上所述,据本文计算结果和现有研究可以判定利用静态检测数据作为参考基准,对动态检测数据进行里程误差修正的方法是可行的。
3 里程误差修正模型
为保证里程误差修正工作的有效性,对里程误差的测量与修正需要用到绝对正确的里程参考点,参考线路设计资料中的台账数据,其中,道岔表、坡度表、曲线表、桥梁简表、隧道简表所包含的里程数据均可作为里程修正的参考点,文献[10-12,15]中桥梁、道岔等结构的辨识度较差,故本文在进行里程修正时引入线路中的坡度和曲线起、终点里程作为绝对可靠的修正主点。本文修正模型包括数据预处理、第一阶段里程修正、第二阶段里程修正3部分,见图2。第一阶段里程修正利用CCF算法解决动态检测数据在主点位置附近的里程差值及修正;第二阶段里程修正使用DTW算法实现对动态检测数据更加合理的拉伸或压缩,进而实现里程误差的精确修正。

图2 两阶段修正算法流程
3.1 数据预处理
在修正前的准备工作中,需分别读取第1节所建立的轨道静态几何检测数据库中存储的静、动态检测数据以及台账数据中坡度表和曲线表所包含的里程数据。其中静态检测数据的采样间隔为0.125 m,而动态检测数据的采样间隔为0.25 m,为保证动、静数据波形的有效匹配,对静态数据里程列采用线性插值得到间隔为0.25 m的里程数据,并根据此数据采用二维插值得到与新里程相对应的静态检测数据。对于台账数据则需分别读取坡度表和曲线表中的起、止里程数据,并对两者的里程数据进行合并、排序处理,作为主点信息参与接下来的修正过程。
上节中提到,轨道不平顺各项指标检测数据中轨距指标的动、静态数据波形相关性最高,故本文选用轨距指标进行修正结果的验证。
首先,根据实际需求自定义动态待修正的问题区段里程范围Mile(d)为
Mile(d)={xd1,xd2,…,xdn}
(3)
其次,通过xd1和xdn截取与之对应的静态里程区段且满足式( 5 )的条件为
Mile(j)={xj1,xj2,…,xjn}
(4)
xj1=min[|Mile(Ji)-xd1|]
xjn=min[|Mile(Ji)-xdn|]
(5)
式中:Mile(Ji)为静态检测数据点Ji所在位置的里程值;xd1、xdn分别为动态待修正区段的起、止里程;xj1、xjn分别为静态基准区段的起、止里程。
最后,根据上述自定义的动态待修正区段在主点信息序列中提取出该范围内所有主点(基准点)的里程信息为
ZD={zd1,zd2,…,zdm}
(6)
若动态待修正区段里程范围内包含m各主点位置,则将待修正区段分为m+1段进行分段修正。通过计算得出静态基准区段中与主点里程距离最近的静态里程位置xikj,x=1,2,…,m,拟定xikj为基准序列的中心。
3.2 第一阶段里程修正
互相关函数(cross-correlation function, CCF)作为一种度量两个随机变量间关系的数字特征,在本文中用来计算不平顺静态和动态检测数据之间的相似性,并根据两者相关系数最大的位置,进一步粗略估计出动态检测数据相对于静态检测数据的里程误差值。假设静、动检测数据分别为
J={j1,j2,…,jn}
(7)
D={d1,d2,…,dm}
(8)
式中:J为静态检测数据集;D为动态检测数据集。
使用互相关进行有效计算的前提是两个数据集具有相等的数据量。为满足修正要求和提高修正精度,引入长度为λ的矩形窗,通过移动窗口得到互相关函数的最大值位置,即最佳匹配位置,以及与其对应的里程偏差S,见图3。

图3 利用fCCF所得的里程偏差
(9)

在fCCF取最大值时动态检测数据集相对于静态的偏移量与图3中S对应。在完成数据预处理的工作后,确定静态检测数据基准序列的中心位置,将该点作为滑动窗口中点并设置滑动窗的窗长及误差限,并以一个采样间隔作为动态检测数据的待匹配窗口在误差限范围内的移动步长,见图4。图4中,箭头所指方向代表滑动窗移动方向。

图4 主点位置匹配示意
通过计算每次移动后两个窗口内检测数据的相关系数,从而得到整个移动过程中的互相关函数矩阵,再利用寻峰函数得到动、静检测数据的最佳匹配位置及对应的里程差值。
3.3 第二阶段里程修正
轨道不平顺检测数据中的里程误差沿线路处处存在,但绝非是均匀分布的,常见的插值处理会对修正区段内的里程误差进行平均处理。因此,为解决检测数据里程误差随机分布的问题,本文引入动态时间规整算法(dynamic time warping, DTW),以此实现对待修正数据波形更加合理的拉伸或压缩。
将静态检测数据集J设为参考模板,动态检测数据集D设为测试模板。为了对齐这两个序列,DTW算法通常会使用欧几里得距离dis(J,D)作为两个序列中的每个数据点之间相似性的评判标准见式(10),并根据该标准构造出动、静检测数据距离矩阵。
(10)
在动、静检测数据累计距离矩阵中规划出一条最短路径,即代表动、静检测数据之间最佳的匹配效果。该最短路径并不是任意规划的,必须满足以下3个约束条件:
1)边界条件:两个序列首尾必须匹配。
2)连续性:不允许跨过某点进行匹配,只能与自身相邻的点进行匹配。
3)单调性:规划路径一定随时间单调递增。
根据上述约束条件,动、静检测数据间累计距离M的计算式为
(11)
则由其计算结果得到的累计距离矩阵M为
(12)
同时,以修正范围内的累计距离误差作为衡量修正效果优劣的评价指标。
DTW算法虽然使用线性规划可以快速求解,但是轨道几何检测数据动辄上百公里且具有采样间隔小的特点,面对大型矩阵的高阶运算,综合考虑时间消耗、内存占用以及所得路径准确性等多方面因素,对DTW算法作进一步的改进工作[21]。
首先,根据已有研究结果,累计距离矩阵中最短路径分布区域的边界斜率通常为1/2~2[22],因此可通过限制累计距离矩阵的搜索空间来实现运算加速;然后,对动、静态检测数据进行粗粒度化处理,先对两个序列进行数据抽象,得到最短路径的粗略分布带,以此确定最短路径的大致分布范围;最后,对序列进行细粒度化处理,通过不断的迭代最终确定最短路径的准确位置。这种改进方法在保证计算结果正确的前提下,最大限度的提高了DTW算法的计算速度以及最短路径的合理性。
动、静态里程误差修正的核心思想为利用动、静态检测数据在相同里程位置上因相同的轨下基础条件、线形条件等因素而表现出相似且规律性的波形变化趋势,对动、静态检测数据波形进行匹配对齐,从而达到修正的效果,动、静态轨距指标原始波形对比见图5。由图5可知,动、静态检测数据的原始波形因其检测系统的高频率性具有大量的数据突变点,为了得到更好的匹配效果,对两者进行滑动平均滤波处理,得到两者随里程位置改变的波形变化趋势。

图5 动、静态轨距指标原始波形对比
动、静态轨距指标滤波波形对比见图6。由图6得知,在对动、静态轨距数据进行滤波处理后,二者间反映出趋于一致的波形变化规律,满足了利用DTW算法实现里程修正的前提条件。但通过对上图的观察很清楚的看到两者的波形之间存在一个近似常数的纵向漂移因子,该漂移因子的存在可能会造成DTW算法利用欧氏距离进行相似度计算时出现匹配失真的问题。因此,本文对动、静态轨距数据的纵向漂移因子做出了剔除处理,以此达到更加真实合理的修正效果。

图6 动、静态轨距指标滤波波形对比
4 实例分析
为探究修正方法的修正效果,利用某高铁线路的轨道几何测量值进行案例研究。首先提供线路相关信息;然后根据评估标准对动、静态轨道几何检测数据里程修正的结果进行展示和分析;最后对修正精度的影响因素进行分析。
4.1 线路信息
本文研究基于某高铁线路采集的轨检数据,该路段设计速度为300 km/h。选取该路段2020年的动、静态检测数据进行匹配修正。检测报告详细记录了测量数据位置和轨检车运行速度的信息,以及轨道几何参数的测量数据。例如,高低、轨向、轨距、水平(超高)、三角坑等;其中,轨检车运行速度为231~262 km/h。
4.2 结果分析
在动、静态检测数据的初步修正中,将用于主点位置信息匹配的滑动窗窗长设置为50 m,误差限为±100 m,滑动步长为0.25 m;在完成初步修正实现动、静态检测数据主点信息的配准后,对二者的波形进行整体修正,修正前的滑动平均滤波过程,通过综合分析滤波效果及后续的修正效果,设置其滑动参数N=20;对于动、静态轨距指标的检测数据存在近似常数差值的问题,本文使用动、静态轨距数据的均值差值作为漂移因子。修正前、后轨距指标波形对比见图7。
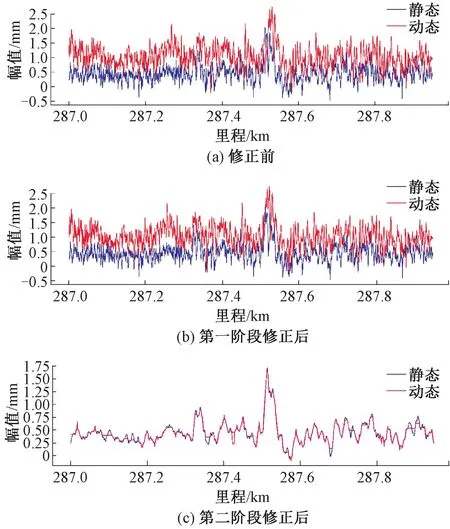
图7 修正前、后轨距指标波形对比
由图7(a)可知,原始波形中虽然存在诸多毛刺和纵向差值,但认可看出二者间存在趋于一致的变化趋势以及明显的横向里程错位;由图7(b)可见,动态波形根据主点位置进行横向初步配准;由图7(c)可见,动、静态检测数据波形实现了精确匹配与高度对齐。修正后的波形存在部分合理缩放,这种情况不会造成数据中超限信息、结构伤损信息等有效信息的缺失,而且因超限或伤损位置具有显著特征可以实现更精准的匹配,进而更有利于确定超限或伤损的实际位置和更准确的分析该信息。
据前文所述,通过计算动静波形的欧氏距离作为累计距离误差,以此完成对修正效果的量化。案例展示的区段采用本文所提出的CCF+DTW组合算法进行里程修正后,轨距指标的动、静态检测数据波形重合性较好,该区段的动、静态轨距检测数据在修正前的累计距离误差为1 388.575 mm,利用本文所提出的组合算法进行修正后累计距离误差下降至69.605 mm,降低幅度可达到95%。
为进一步验证本文组合算法的有效性和可重复性,选取其他区段进行里程误差修正工作,并对修正前后的累计距离误差进行对比分析,所得结果见表2。

表2 其他区段修正前后误差对比
由表2可知,6个区段经修正后的累计距离误差降幅均大于93%。由此可以证明,本文所提出的CCF+DTW组合算法对于解决轨道几何检测数据里程误差的问题上修正有效且效果明显。
4.3 敏感性分析
本文算法涉及到的两种尺度参数为用于主点信息匹配的滑动窗窗长λ和用于数值滤波的滑动参数N。经验证,滑动窗窗长的设置对第一阶段修正过程的计算效率存在一定影响,但对本文模型的最终计算结果及精度影响较小;滑动参数的变化则会直接影响动、静波形的匹配效果,进而导致修正精度的改变,为实现更佳的匹配效果且保留数据的有效信息,需对滑动参数的合理取值范围进行探究。以图7所对应的区段为例,计算得到滑动参数与修正精度的关系见表3。由表3可知,当滑动参数取值过小时,检测数据波形突变点过多,造成动、静波形匹配效果不佳,从而导致修正精度偏低;当滑动参数取值过大时,会丢失大量的有效匹配信息,同样导致修正精度变差。综合考虑动、静波形的匹配效果、动态波形的合理缩放以及数据有效信息的保留,得出滑动参数的最佳取值范围为20~40。

表3 滑动参数与修正精度的关系
主点信息同样影响本文算法的修正效果,如本文所举案例125 km的范围存在178个主点,基本保证了算法的有效运行,当选取的待修正范围过小(该范围内没有主点信息)时,会造成本文算法的第一阶段失效。为避免这种情况发生,故拟定所取区段的起、终点及互相关函数最大的滑动窗的中点作为伪主点参与本文算法的第一阶段修正过程,以此增强算法的鲁棒性。
研究表明,不同轨道质量状态和轨道结构类型会对动、静态检测数据关系的显性表达式产生一定的改变,但具体关系的变化并不影响动、静态检测数据间的相关性匹配,因此,本文算法适用于线路全区段里程误差修正工作。
5 结论
针对轨道几何动态检测数据中存在里程误差的问题,本文利用静态检测数据作为参考基准对动态检测数据进行数据波形匹配,提出基于CCF+DTW的组合算法,并取得显著修正效果,满足动态检测数据后续使用的要求,为预测轨道几何劣化趋势和制定经济合理的养护维护策略提供了一定的研究基础。主要结论如下:
1)通过轨道几何动、静态检测数据对比分析,高低和轨距指标的动静数据可进行较好的波形匹配,为探究动、静态检测数据间的内在联系提供了理论支撑。
2)本文算法使用到两种尺度参数,其中滑动窗窗长对修正精度影响较小,取经验值即可;滑动参数的改变会对修正精度产生直接影响,建议取值20~40。
3)根据动、静态检测数据高度相关的特点,利用CCF+DTW组合修正算法,解决了动态检测数据存在的里程误差问题,修正效果明显,累计距离误差的降低幅度超过93%,且修正后里程误差可控制在一个采样间隔[-0.25,0.25] m范围内。
4)动、静态检测数据各指标的相关性存在显著差异,且不同的轨道条件下的动静关系同样存在差异,未来可做进一步探究。
猜你喜欢
疯狂英语·新读写(2023年4期)2023-05-10
云南画报(2021年8期)2021-11-13
科技视界(2019年9期)2019-06-12
阅读(低年级)(2019年4期)2019-05-20
机械工程与自动化(2018年5期)2018-11-01
车迷(2017年12期)2018-01-18
中国宝玉石(2017年2期)2017-05-25
中国宝玉石(2017年1期)2017-03-24
读写算(上)(2015年6期)2015-11-07
电子设计工程(2015年17期)2015-02-27