基于模糊-PID的高空台液压加载系统智能控制
2024-01-31 13:15李桂财郭迎清郭鹏飞赵万里李睿超
测控技术 2024年1期
李桂财,郭迎清,郭鹏飞,赵万里,彭 晋,李睿超
(1.西北工业大学 动力与能源学院,陕西 西安 710129; 2.中国航发四川燃气涡轮研究院,四川 绵阳 621700)
航空发动机高空模拟试车台(简称高空台)是能够模拟发动机空中飞行工作状态的地面试验设备,已成为航空发动机研发的关键试验设备[1-2]。液压加载系统作为高空台的子系统之一,用于模拟飞机机载液压泵的工作,在提取发动机的功率后可对发动机的各项参数进行测量,从而评估机载液压泵对发动机的影响。在试验过程中,液压加载系统给发动机机载液压泵提供所需压力、流量的液压油,操作人员主要通过调节机载液压泵出口阀门开度在泵后造成一定节流阻力,使机载液压泵在一定的负载状态下运行,达到模拟发动机飞行状态所需的机载液压泵载荷的目的。随着我国航空发动机技术的不断发展,对发动机试验条件的要求越来越高,试验流程的高效化、智能化、自动化发展已成为重要的研究方向,对高空台液压加载系统进行智能化控制具有重要的意义[3-4]。
高空台液压加载系统在工作过程中,机载液压泵后流量会因控制系统的作用而跟踪加载谱的目标流量,由于泵前后有较大的定压差(通常在20~30 MPa之间),使航空发动机在对应流量谱的功率负载下运行,因此高空台液压加载系统的控制过程是一个流量控制过程。在液压系统中,流量通常通过泵控系统或阀控系统进行控制。其中,泵控系统通过控制泵排量或泵转速来控制流量;阀控系统使用固定排量和转速的泵,并使用阀门调节流量,这种系统的使用成本较低。高空台液压加载系统在航空发动机试验过程中通过阀门电信号来控制系统的流量,需要对该阀控系统进行控制器设计,以实现试验过程中流量跟踪自动化运行。典型的阀控系统框图如图1所示,其中流量(Q)通过控制阀门开度(AV)来控制[5-7]。
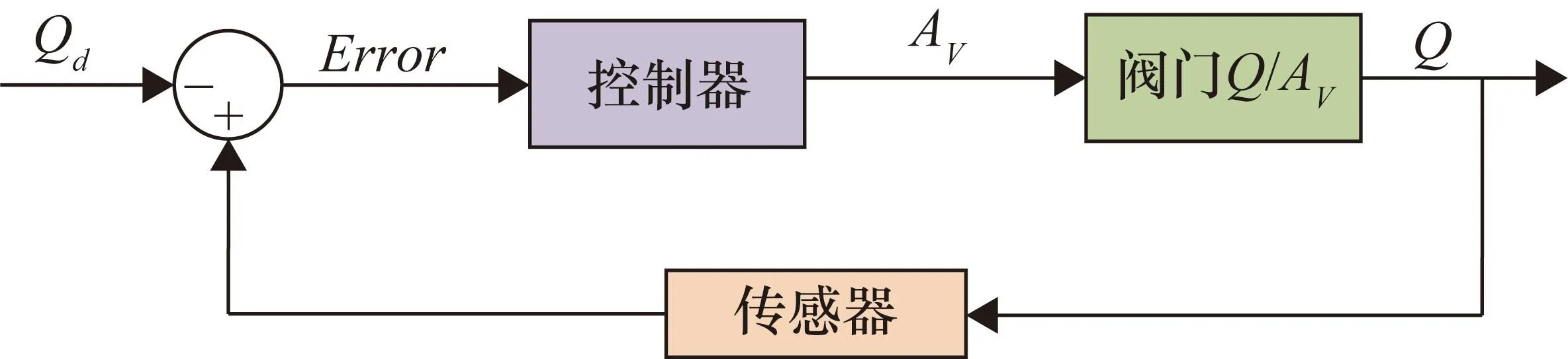
图1 典型的阀控系统框图
常规的阀控系统中,固定排量泵与溢流阀一起使用。阀门位于泵的下游,用于将过量的流量回流。由于泵后和油箱间存在较大的压降,这种系统中的回流作用可能会产生较大的能量损失。Tomlinson等[8]提出了使用固定排量泵和泵后的溢流阀实现可变流量源的方法。这种液压系统与泵控流量系统相比,成本和复杂性更低,寿命更长,因为该系统中的泵在零流量条件下卸载,从而减少了在零流量或低流量条件下对泵施加的力。王润林等[9]通过试验插值计算获得在不同位移和压差情况下流量的三维数据表,然后通过查表获得计算流量并用于PID控制系统以跟踪目标流量,解决了流量传感器测量信号的不足。Zhang[10]设计了一种采用前馈加PID(Feed-Forward PID,FPID)控制器的线性执行器速度控制系统,在这种设计中流量是通过定向节流阀控制的。系统非线性由前馈回路补偿,速度跟踪误差由PID控制器补偿。结果表明,FPID控制器的R2指标比前馈回路低15%,比PID控制器低45%,并且使用FPID控制器可以提高系统的稳定性和动态性能。Aranovskiy等[11]提出了位置控制系统的非线性模型,并对模型进行了试验验证,模型中的溢流阀用于调节进入作动器的流量,使用速度前馈改进了系统的动态响应。Ji等[12]提出了一种采用自适应滑模控制电液执行器的方法,使用李雅普诺夫理论测试控制算法的稳定性,使用MATLAB/Simulink和AMESim进行了联合仿真,在存在参数不确定性的情况下,得到了较好的控制效果。Ali等[13-14]进行了阀门的动力学分析,通过试验确定了气门动力学参数,研究了具有PID、H∞和双变量控制器的开环和闭环系统的稳定性和性能。该团队还研究了包含入口计量泵的系统的鲁棒性[15],设计了PID控制器和H∞控制器,并对2种控制器的系统稳定性进行了研究,结果表明,只有H∞控制器满足鲁棒性要求。Jin等[16]设计了液压检验系统的PID控制方法,并将模糊控制理论与PID控制理论相结合,设计了一种能够在线调节PID参数的模糊PID控制器,通过仿真对比得出,模糊PID控制器提高了系统的稳定性和动态性能。
以上阀控系统虽然在稳定性和快速性上取得了较好的控制效果,但控制过程没有体现液压系统操作人员的专家经验,没有将先验知识体现在控制器结构中。目前,高空台液压加载系统广泛使用的流量控制方法仍为人工调节阀门开度的开环控制方法,该方法控制精度低、流量残差较大,往往不能满足试验准确加载的要求。但试验人员在大量手动调节过程中积累了一定的专家经验,同时,通过分析并挖掘历史试验数据也可以得出一些结论。智能控制的一个要素即使用专家经验进行控制器设计以使控制系统性能得到优化,同时提高控制过程的可解释性。模糊控制在专家经验控制系统中得到广泛使用,但并没有在液压系统智能控制中得到很好的应用。高空台液压加载系统作为大型复杂的液压系统,试验人员的开环控制历史试验经验对于控制系统设计来说是十分宝贵的,本文将体现专家经验的模糊开环控制与PID闭环控制相结合,设计复合控制器,以改善高空台液压加载系统的控制器性能。
本文首先基于高空台液压加载系统试验数据进行系统辨识,以搭建系统分段线性模型,并基于模型的线性传递函数进行PID控制器设计;提出高空台液压加载系统复合控制框架,搭建开环模糊控制器,并将开环模糊控制器与闭环PID控制器相结合形成智能复合控制器。通过仿真验证,该智能复合控制器的控制效果优于PID控制器。
1 液压加载系统模型分析与PID控制器设计
高空台液压加载系统的油路如图2所示,其主要设备包括油箱(液压油源)、地面液压泵、机载液压泵、电液比例阀、溢流阀等,除油箱外,各部件均有左右2套,分别用来试验飞机上的2台航空发动机。虚线框内的部分为机载设备,包括机载液压泵和开关阀门,高空台液压加载试验便是模拟机载液压泵提取航空发动机功率的过程并观测其对航空发动机造成的影响。在工作时,地面液压泵为飞机机载液压泵提供充足的油源,机载液压泵为恒压泵,当比例阀开度小于预设值时泵后压力恒定。比例阀作为耗能部件须与电子放大器配合使用,电子放大器根据输入信号向比例阀电磁铁提供一个适当的电流。比例电磁铁将电流转换成作用在阀芯上的机械力并克服复位弹簧,随着电流增大,电磁铁输出的力增大,复位弹簧被压缩,于是阀芯开始移动,进而改变主阀芯的开口面积大小,在压差一定的前提下,比例阀开口面积的变化直接引起阀进出口前后流量的变化,进而改变阀门消耗的功率,实现了对机载液压泵进行加载的目的。

图2 高空台液压加载系统油路
高空台液压加载系统的试验过程中,流量的变化主要分3个阶段,分别为加载段、脉冲模拟段和卸载段。加载段将通过阀门的流量大幅下降至试验设定流量,并将阀前压力升高到额定压力;脉冲模拟段压力恒定,流量在短时间内阶跃突变后返回至试验设定流量,该阶段主要通过模拟脉冲输入来测试功率突变对航空发动机的影响;卸载段流量和压力返回至加载前的状态。以某次试验过程为例,在加载段,将通过阀门的流量从258 L/min下降到46.2 L/min,压力从4.9 MPa上升到28.5 MPa;在脉冲模拟段,流量从46.2 L/min突变到150~250 L/min,再迅速地回调到46.2 L/min;在卸载段,流量与压力返回至加载段之前。某次真实试验过程的阀门电信号(控制量)与流量(被控量)变化过程分别如图3(a)和图3(b)所示。

图3 某次真实试验过程的阀门电信号和流量信号图
通过对高空台液压加载系统原理和真实试验数据进行分析,得到以下结论:
① 系统关键控制环节中控制量为阀门电信号,被控量为流量。
② 核心执行机构——比例节流插装阀(ATOS的LIQZO-TEB-SN-NP-402L4)在大范围阀位变化时存在非线性。
③ 加载段控制电流的百分比范围为28%~32%,模拟脉冲段为32%~45%,卸载段为85%~100%,同一试验阶段内阀门可视为线性机构。
④ 3个试验过程中,加载谱流量与阀门电信号均为阶跃变化,所以控制器搭建的重点为系统阶跃跟踪的性能。
由于高空台液压加载系统部件存在非线性,同一试验阶段内模型可视为线性,同时历史试验数据完整,因此建模过程可以使用真实试验数据最小二乘线性系统辨识出3个线性模型,以对应3个试验阶段。在仿真时,通过目标流量的大小进行模型选择,形成分段线性化模型,建模框图如图4所示。
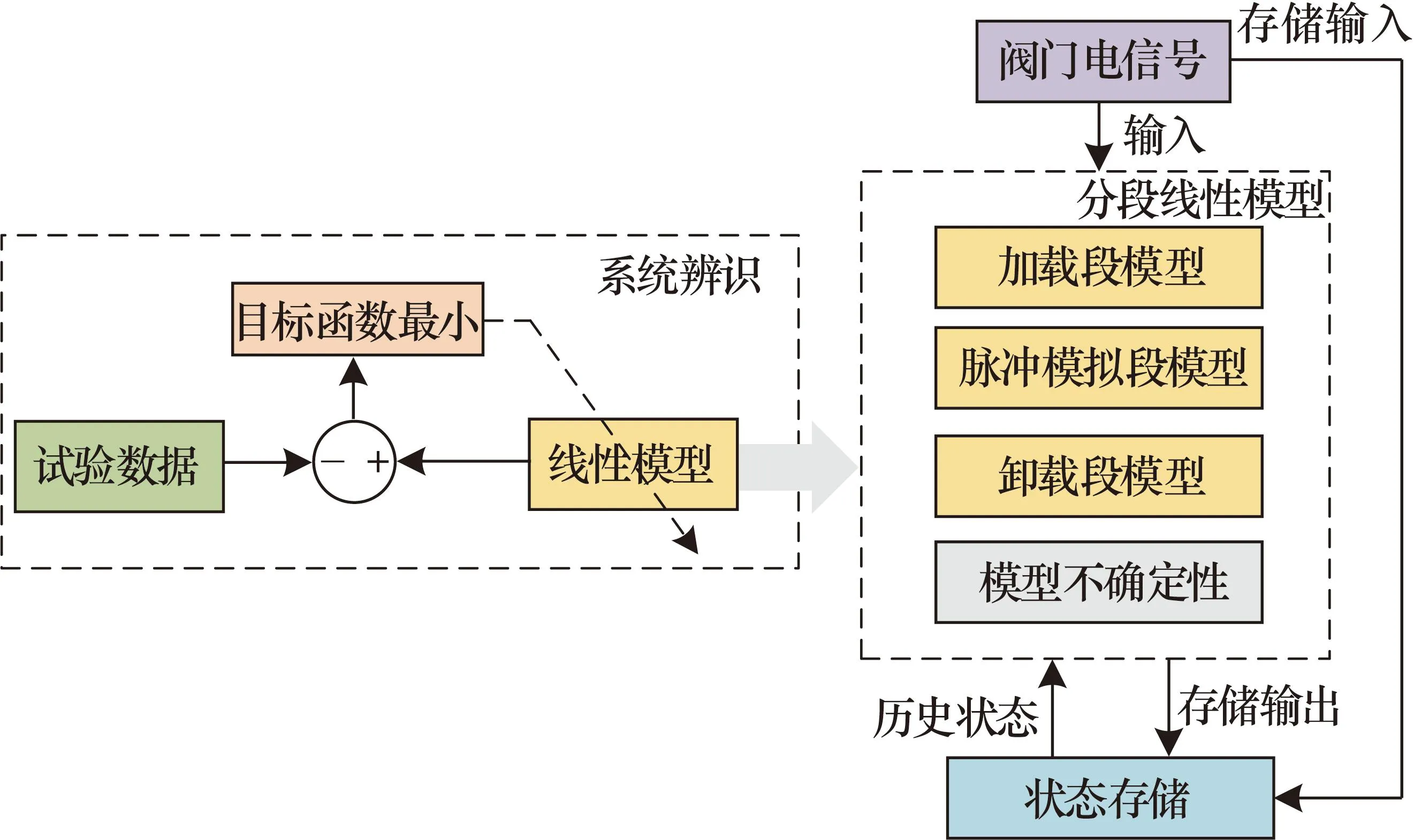
图4 高空台液压加载系统建模框图
系统辨识使用的目标函数为MSE(Mean-Square Error,均方误差),计算公式为
(1)

表1 计算结果
将模型集成后,在3个工作阶段分段线性模型仿真与真实数据的对比分别如图5~图7所示。

图6 脉冲模拟段的线性模型仿真与真实数据对比图
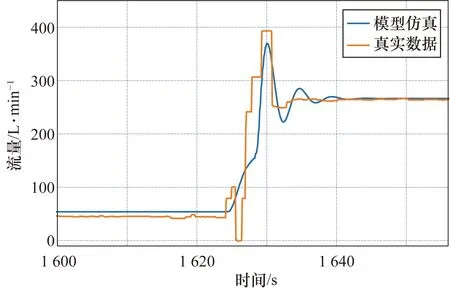
图7 卸载段的线性模型仿真与真实数据对比图
在分段线性模型的基础上,设计PID控制器。PID控制器属于频域中的滞后校正环节,其主要作用是在高频段造成衰减,从而使系统获得足够的相位裕度,其常规结构表示为
(2)
式中:Kp为比例系数;Ki为积分系数;Kd为微分系数。利用频域法进行PID控制器设计,其关键是获取校正后系统的开环频域指标,即穿越频率和相位裕度。这2项频域指标将用于进行PID参数的整定。开环系统在穿越频率处满足的幅值和相位关系为
(3)
式中:ωc为穿越频率,也称幅值截止频率;γ为相位裕度;G(ωc)为校正后的开环频率特性。利用MATLAB下pidtune函数进行分段智能PID控制器参数整定,pidtune函数可以自动根据传递函数和开环频域指标计算出3个阶段的PID控制器参数,具体计算结果如表1所示。
2 智能复合控制器设计
目前,高空台液压加载系统功率谱加载试验中对阀门的控制为开环控制,根据试验需求手动设定程序调节阀门开度,控制不够灵活且精度较低。每次试验都要进行预试验以寻找试验需要的阀门电信号,流程复杂,智能化程度低。所以,在设计高空台液压加载系统控制器时,使用“开环+闭环”的方法改善控制效果。其中,模糊开环控制用于引入经验知识,实现阀位的快速调节;闭环PID控制位于模糊开环控制后,用于消除残差,确保流量控制的准确性。高空台液压加载系统智能控制框图如图8所示。首先进行开环模糊控制设计,之后将开环模糊控制与闭环PID控制相结合,形成智能复合控制器,并对控制器进行了仿真验证。
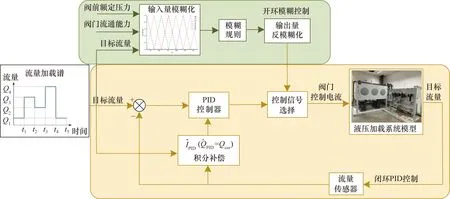
图8 高空台液压加载系统智能控制框图
高空台液压加载系统开环模糊控制充分利用试验人员的经验与历史试验数据分析得到的结论,建立了模糊推理过程并集成模糊控制理论中的模糊化接口与解模糊接口,模糊开环控制框架如图9所示。

图9 模糊开环控制框架
图9中关于模糊控制理论的相关概念解释如下。
① 模糊化接口:是将真实的确定量输入转换为一个模糊向量,用于输入。
② 知识库:知识库包括数据库和规则库。数据库所存放的是所有输入、输出变量的全部模糊子集的隶属度向量值。知识库中继承了对历史试验数据的分析结论和操作人员的专家经验。规则库是用来存放全部模糊控制规则的,在推理时为“推理机”提供控制规则。
③ 推理机:用于在模糊控制器中,根据输入模糊量,由模糊控制规则完成模糊推理来求解模糊关系方程,并获得模糊控制量。
④ 解模糊接口:将模糊推理的结果(模糊向量)转换为清晰的控制量输出。
针对高空台液压加载系统典型试验过程,对系统模糊开环控制器进行设计。模糊开环控制器设计的关键内容包括总结历史试验经验、论域设置、模糊子集设置、模糊关系设置和反模糊化方法设置。
① 依据试验人员的历史试验经验,模糊控制的输入为阀前额定压力、目标流量和阀门流通能力,输出为阀门电信号。由试验操作人员的经验可以得出阀门电信号与阀前额定压力和目标流量的关系为:对于给定的阀前额定压力,目标流量越大,阀门电信号越大;对于一定的目标流量,阀前额定压力越大,阀门电信号越小。
② 论域设置:基于高空台液压加载系统典型工艺过程和试验过程、设备特性和对历史试验数据的分析,阀门流通能力分为300 L/min和160 L/min这2种,阀前额定压力的论域设置为[20,30]MPa,目标流量的论域设置为[25,325]L/min,控制电流的论域为[0.15,0.95]。
③ 模糊子集设置:流量的模糊子集和阀门电信号的模糊子集均为[′NB′,′NM′,′NS′,′NZ′,′PZ′,′PS′,′PM′,′PB′],阀前额定压力的模糊子集为[′S′,′M′,′B′],程度依次增大。隶属度函数采用三角隶属度,以目标流量与阀门电信号为例,其开环模糊控制的隶属度函数如图10所示。

图10 开环模糊控制的隶属度函数图
④ 模糊关系设置:基于专家经验与历史试验数据的分析结果设置输入与输出的模糊关系,在2种阀门流通能力下的模糊关系分别如表2、表3所示。
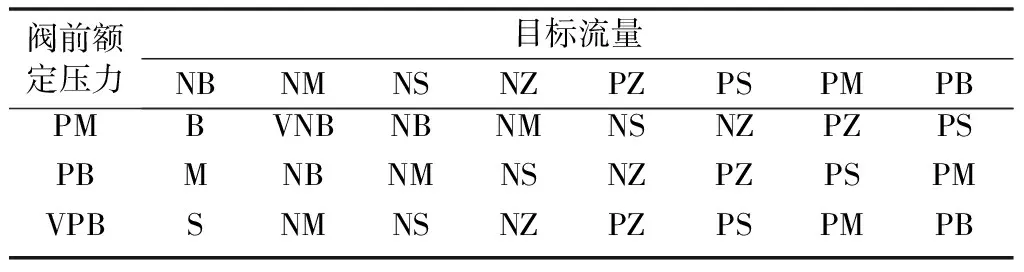
表2 使用大阀(流通能力为300 L/min)的模糊关系

表3 使用小阀(流通能力为160 L/min)的模糊关系
⑤ 反模糊化方法设置:采用重心法,公式为
(4)
式中:vo为反模糊化的结果;v为输出模糊量;μv(v)为隶属度函数。
设计完模糊开环控制器后,将其与PID闭环控制集成,并设定基于被控量相对误差的控制器选择模块,控制信号切换逻辑如式(5)所示。在被控对象的设置中,使用加载谱目标流量识别当前目标流量变化过程的工作状态,并将被控对象和PID参数切换为该工况对应的线性模型和PID参数。
(5)
式中:ureal为控制器当前控制逻辑值;uopen和uclose分别为开环控制和闭环控制逻辑值;y为实际流量;yref为目标流量。当目标流量发生变化时,智能控制器首先进行开环控制,到实际流量满足切换条件时,进行PID闭环控制。虽然在开环控制过程中,PID控制器一直在积分,但积分值不足,当切换为闭环控制时,会出现控制量跳变的情况,并且在此之后,由于切换逻辑使用流量的相对误差来判断,因此会出现实际控制量在开环与闭环之间反复切换的问题,进而造成被控流量不稳定现象,如图11所示。需要在智能控制器中添加积分补偿模块,使控制器从开环切换为闭环时,控制量只有很小的变化。控制器积分补偿示意图如图12所示。理论上,PID控制器的积分量应该与只使用PID控制器时达到相同流量状态时的积分值相同,如图12中黄色和绿色面积之和。需要补偿的积分数值为实际流量(红色曲线)与只有PID控制的模拟曲线(绿色曲线)之间的面积。
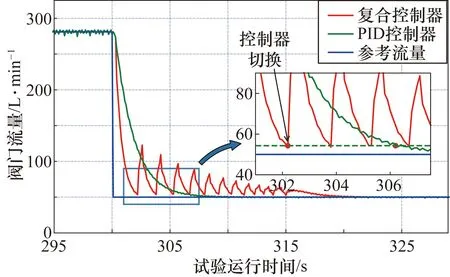
图11 控制切换不稳定的流量控制过程
3 控制系统仿真验证
将智能复合控制器与高空台液压加载系统分段线性化模型以图8所示的方式进行连接,并使用试验模拟加载谱(如图13所示)进行仿真验证,并与PID控制器的控制效果进行对比,如图14~图16所示。
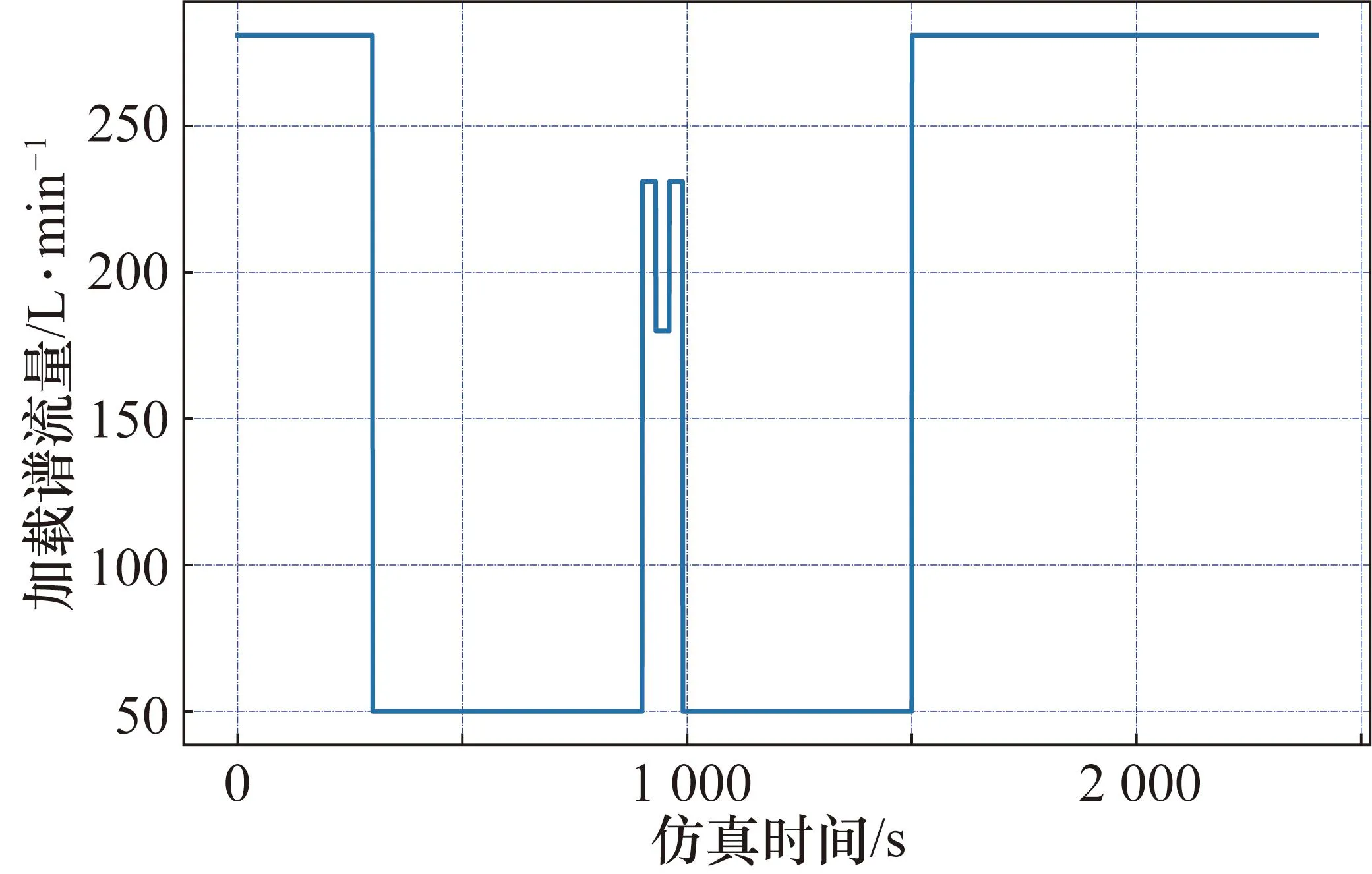
图13 智能控制器仿真验证使用的模拟加载谱
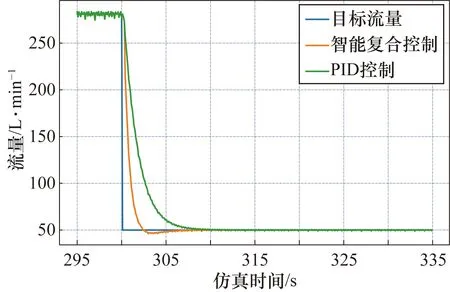
图14 加载段控制器仿真流量图

图15 脉冲模拟段控制器仿真流量图
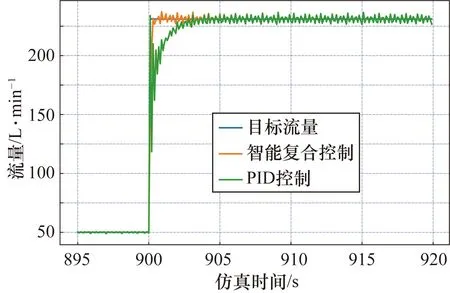
图16 脉冲模拟段控制器仿真流量图(局部放大)
从仿真结果可以看出,在不同试验阶段,智能复合控制器的调节时间在5 s内且没有稳态误差。多次仿真结果对比如表4所示,智能复合控制器在稳态精度方面明显优于手动开环调节,在快速性方面优于PID控制器,在3个试验阶段,其调节时间比PID控制器缩短了39%~87%,满足了高空台液压加载系统试验过程对控制系统的要求,实现了试验过程又快又准的控制效果。
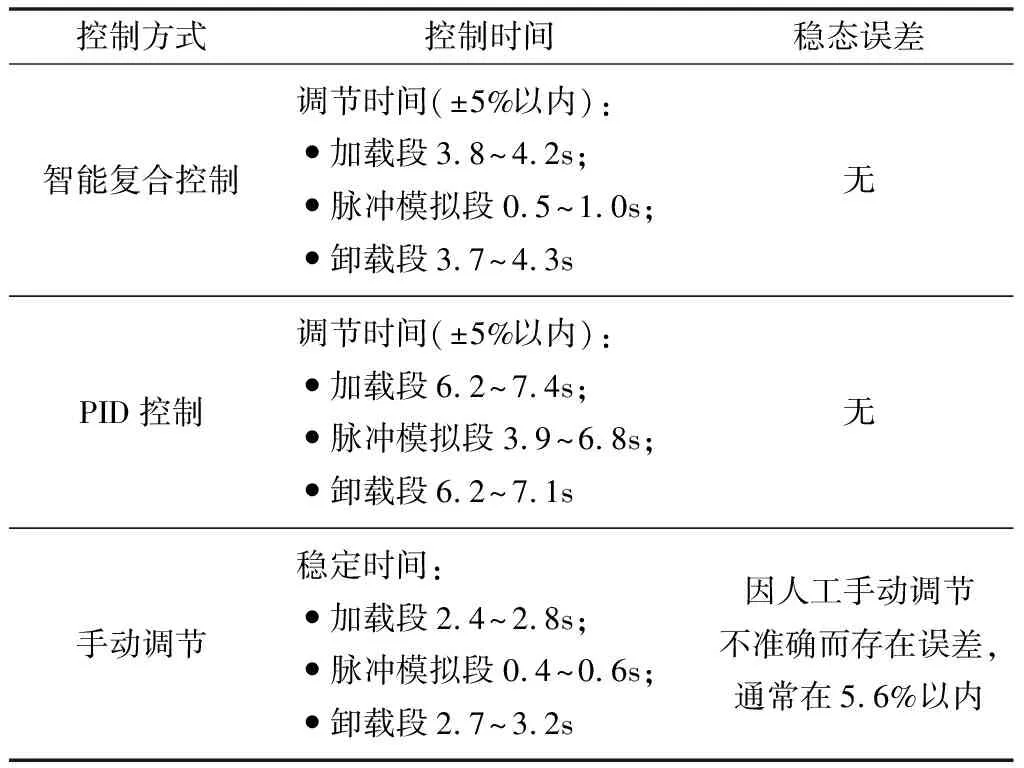
表4 不同控制方式性能对比
4 结论
通过研究,得出以下结论:
① 基于高空台液压加载试验特点和设备特性,结合历史试验数据辨识出电液比例阀的分段线性化模型,利用穿越频率和相位裕度设计了不同工作状态下的PID控制器。
② 提出了一种将开环模糊控制与闭环PID控制相结合的智能复合控制器。利用专家经验设计模糊控制器实现了液压加载试验的快速调节,采用闭环PID控制器提高了控制精度,加入切换模块和积分补偿模块实现了2种控制方式的无扰切换。
③ 模拟了高空台液压加载系统不同阶段的加载谱试验,并对设计的智能复合控制器进行了仿真验证。结果表明,智能复合控制器没有稳态误差,在快速性上也明显优于PID控制器,调节时间在不同试验阶段比PID控制器缩短了39%~87%,可实现又快又准的控制效果。
猜你喜欢
环球时报(2022-02-28)2022-02-28
现代制造技术与装备(2021年9期)2021-04-03
小天使·一年级语数英综合(2019年2期)2019-01-10
小天使·一年级语数英综合(2018年11期)2018-11-23
小学阅读指南·低年级版(2018年5期)2018-11-02
通信电源技术(2018年5期)2018-08-23
电子测试(2018年1期)2018-04-18
合成化学(2015年4期)2016-01-17
海军航空大学学报(2015年1期)2015-11-11
中国修船(2014年5期)2014-12-18