
机车辅助驾驶系统的仿真平台研究
2024-01-30 13:56梁春燕
铁路通信信号工程技术 2024年1期
梁春燕
(国能新朔准池铁路(山西)有限责任公司,山西朔州 036003)
1 概述
重载铁路运输作为大宗物资的主要运输方式,具备高效的运输能力、成本效益以及全天候的运营特点。过去这种运输方式主要依赖于人工驾驶,但这种方法面临着一些挑战。首先,由于重载货物列车的编组和载重量较大,这增加了驾驶员操作的复杂性。长时间的驾驶工作容易使驾驶员感到疲劳,可能导致驾驶失误。这些失误可能引发列车的纵向冲击、非正常停车、超速或者断钩等严重问题,从而对铁路运输的安全性构成威胁。为了提高运输效率、降低成本并减轻驾驶员的工作负担,需要采取相应的措施来改善这种情况,机车辅助驾驶系统在提高机车行驶安全性和驾驶效率方面具有巨大潜力。然而直接在实际机车上测试系统存在风险且成本高昂,因此建立适用于机车辅助驾驶系统的仿真平台成为关注焦点。中国铁道科学研究院集团有限公司于2019 开发了基于LKJ 的机车辅助驾驶系统,能够依靠LKJ 中的线路信息GPRS 接收到的调度信息和运行计划进行线路规划。北京交通大学针对自研的辅助驾驶系统,开发了一套半实物综合实验平台。德国联邦铁路公司开发了一套现代化的机车辅助驾驶系统仿真平台,用于测试和验证新的辅助驾驶系统的功能和安全性能。该平台能够模拟不同的运行情景,并支持对系统参数的调整和优化。日本国铁在机车辅助驾驶系统的研究上也取得了一定的成果,他们借助仿真平台,进行列车行驶的动态仿真和性能评估,以实现列车的安全运行和提高运行效率。由于在机车辅助驾驶系统方面的研究还在不断发展中,并且涉及到多个方面的技术和应用,针对仿真平台的研究也是一个较为复杂的领域。因此,根据具体的研究目标和需求,选取合适的国内外研究成果和仿真平台,进行进一步的研究和应用是必要的。
本论文旨在介绍一种适用于机车的辅助驾驶系统仿真平台,以实现对机车辅助驾驶系统的准确评估和测试。本论文首先对仿真平台的功能需求进行分析,基于具体的功能需求,提出仿真平台设计方案。同时,该平台还集成了机车辅助驾驶系统的算法和控制逻辑,可以进行性能评估和功能测试。
2 仿真平台的功能需求
铁路机车辅助驾驶系统仿真平台的设计功能需求包括模拟铁路环境、生成列车运行情况、模拟机车行为、模拟信号系统、模拟传感器输出、集成机车辅助驾驶系统算法、交互式界面、性能评估和功能测试、数据记录和分析、场景编辑和模型定制能力。
1)模拟铁路环境
能够模拟铁路线路和车站环境,包括不同类型的铁路线路(高速铁路、普速铁路等)和车站设施。
2)生成列车运行情况
能够生成列车的运行情况,包括列车的行驶速度、加速度、制动性能和列车间的距离等。
3)模拟机车行为
能够准确模拟机车的行驶行为,包括车辆的起步、加速、减速、制动等操作。
4)模拟信号系统
能够模拟铁路信号系统,包括信号机、信号灯、标志和信号逻辑,以及模拟信号系统对机车行驶的影响。
5)集成机车辅助驾驶系统算法
能够将机车辅助驾驶系统的算法集成到仿真平台中,使其能够与仿真环境进行交互和测试。
6)交互式界面
提供友好的交互式界面,使用户能够与仿真平台进行交互,如设置参数、调整算法、观察仿真结果等。
7)性能评估和功能测试
能够对机车辅助驾驶系统进行性能评估和功能测试,包括评估平台能够支持与辅助驾驶系统之间每200 ms 进行一次通信,辅助驾驶系统具备实时处理能力、响应时间和稳定性等指标,以及验证系统功能的有效性和可靠性。
8)数据记录和分析
具备数据记录和分析功能,能够记录仿真过程中的关键数据,如机车行驶数据、传感器数据等,并支持对这些数据进行分析和可视化展示。
9)场景编辑和模型定制
提供场景编辑和模型定制的功能,使用户能够根据需要创建特定的仿真场景和定制机车模型。
3 仿真平台设计方法
1)系统架构设计
确定仿真平台的整体架构,包括软件和硬件组成部分。采用分布式架构,将仿真模型和用户界面分离,以提高系统的可扩展性和灵活性。
2)用户界面设计
设计易于使用的用户界面,使驾驶员能够直观地理解列车运行情况,并进行操作和控制。界面应具备实时显示和交互功能,以提供与真实运行情况相似的使用体验。
3)辅助驾驶功能设计
根据实际需求,确定需要实现的辅助驾驶功能,如自动制动、自动驾驶及辅助驾驶等。设计相应的算法和控制逻辑,实现这些功能并与仿真模型进行集成。
4)数据记录和分析
设计数据记录和分析功能,可以记录仿真过程中的关键数据,如列车速度、位置、控制输入等。这些数据可以用于系统性能评估、故障分析和算法改进。
5)接口和集成
设计与外部系统的接口,如列车信号系统、列车控制系统等。确保仿真平台与现实世界的数据和控制信息的交互能够正常进行。
6)软件开发和调试
根据设计方案,进行仿真平台的软件开发和调试工作。实施软件开发过程中的质量控制措施,如单元测试、集成测试和系统测试,确保软件的正确性和稳定性。
4 工作原理
整个工作原理依靠数据采集、模型构建和仿真模拟的流程来模拟机车辅助驾驶系统的运行。通过仿真平台的工作,可以评估系统在各种情况下的性能、安全性和可靠性,为算法的开发和系统的优化提供有价值的参考和支持。
1)列车动力学模型的工作原理
列车动力学模型基于物理原理和数学模型来描述和模拟列车在运行过程中的动力学行为。该模型考虑列车的质量、惯性、摩擦力、制动力和牵引力等因素,并通过计算模拟列车的加速度、速度和位置等参数。其工作通常包括以下步骤:
输入参数:输入列车质量、牵引力、阻力、曲线半径、坡度、摩擦系数和空气阻力等参数。
设定初始化状态:设定初始条件,如初始速度、位置等。
计算牵引力和阻力:根据输入参数和列车状态,计算牵引力和阻力,其中牵引力受牵引系统和列车功率的影响,阻力受空气阻力、摩擦阻力和坡度影响。
计算加速度:根据牵引力和阻力的平衡,计算列车的加速度。
更新速度和位置:根据计算得到的加速度,更新列车的速度和位置。
循环迭代:重复进行加速度计算和状态更新,以模拟列车在时间上的运行过程。
2)轨道系统模型的工作原理
轨道系统模型用于模拟列车在轨道上的运行状况,包括轨道几何、曲线半径、坡度、道岔等参数。该模型考虑列车与轨道之间的交互作用,包括车轮与轨道之间的接触力、轮轨摩擦等因素。其工作一般包括以下步骤:
将轨道参数写入脚本:包括轨道几何、曲线半径、坡度、道岔等参数。
列车与轨道交互:根据列车位置和轨道参数,计算列车与轨道之间的交互作用,包括车轮与轨道之间的接触力、摩擦力等。
轮轨接触模型:使用适当的轮轨接触模型,考虑动力学和力学因素,计算列车受到的轮轨接触力和摩擦力。
速度、加速度和位置更新:根据计算得到的轮轨接触力和摩擦力,更新列车的速度、加速度和位置。
循环迭代:重复进行轮轨交互计算和状态更新,以模拟列车在时间上的轨道运行过程。
3)信号系统模型的工作原理
信号系统模型用于模拟列车在运行过程中的信号控制和指示。该模型考虑不同类型的信号灯、信号机、信号电路和信号命令等元素。其工作一般包括以下步骤:
输入信号参数:包括信号灯状态、信号机位置、信号命令等参数。
信号状态监测:根据输入参数,监测信号状态,并确定列车应该采取的行动。
信号控制和指示:根据信号状态和运行需求,生成相应的信号控制和指示,如允许前进、减速、停车等。
列车响应:列车根据接收到的信号控制和指示,采取相应的行动,如加速、减速、停车等。
循环迭代:重复进行信号状态监测、信号控制和列车响应,以模拟列车在运行过程中的信号控制和指示过程。
5 试验验证
根据列车辅助驾驶设备的系统需求规范的条目,从用户使用及业务场景的角度出发设计测试案例。例如验证机车辅助驾驶系统的功能、性能和安全性能,评估其对驾驶员的辅助效果,检验系统是否满足设计要求等。列车辅助驾驶设备目标机测试环境如图1 所示。
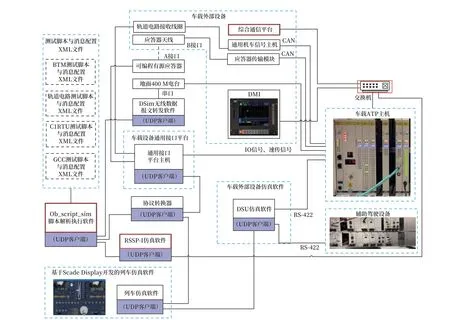
图1 列车辅助驾驶设备目标机测试环境示意Fig.1 Test environment diagram of target device for locomotive-assisted driving equipment
测试根据测试仿真软件进行黑盒测试,共设计29 个测试案例,执行 1 轮测试,本次测试的结论为:测试通过。
列车辅助驾驶仿真模型司机操控界面如图2 所示。此界面可设置列车起始位置,并操控方向手柄、牵引制动手柄、大闸及小闸位置等。

图2 司机操控界面Fig.2 Driver control interface
司机根据当前列车基本信息填入司机号、车种标识、车次号码、列车类型、列车总重、列车辆数、计长等信息,此信息将发送至辅助驾驶系统,辅助驾驶设备根据列车信息对系统参数调整和优化。列车基本信息输入界面如图3 所示。
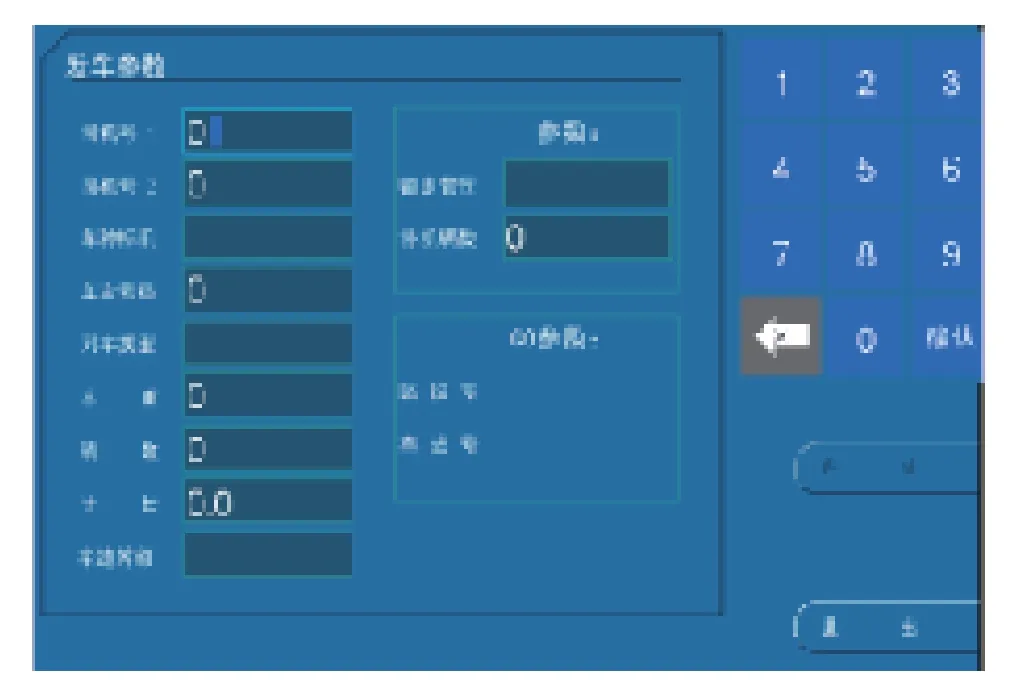
图3 列车基本信息输入界面Fig.3 Basic train information input interface
当列车进入辅助驾驶模式后,系统将读入轨道参数:包括轨道几何、曲线半径、坡度、道岔等参数,用于生成限速曲线及传入列车辅助驾驶设备控制列车牵引制动大小。限速曲线显示界面如图4 所示。
司机可选择自动驾驶或辅助驾驶模式。若司机选择自动驾驶模式,辅助驾驶设备将根据线路信息及列车基本信息计算级位及大小闸施加大小。其中线路信息包括线路坡度、弧度、停车点、限速等,列车基本信息包括司机号、车种标识、车次号码、列车类型、列车总重、列车辆数和计长等。辅助驾驶设备根据信号机允许信号及前方限速信息等控制列车驾驶,列车仿真模型将列车辅助驾驶设备施加级位及大小闸转换为列车加速度,控制列车加速及减速。辅助驾驶设备控制列车自动起车及加速过程如图5 所示。

图5 自动起车及加速过程显示界面Fig.5 Automatic start and acceleration process display interface
当列车速度接近限速曲线,辅助驾驶设备根据列车限速及停车点位置等信息,控制列车匀速运行。辅助驾驶设备控制列车巡航过程如图6 所示。
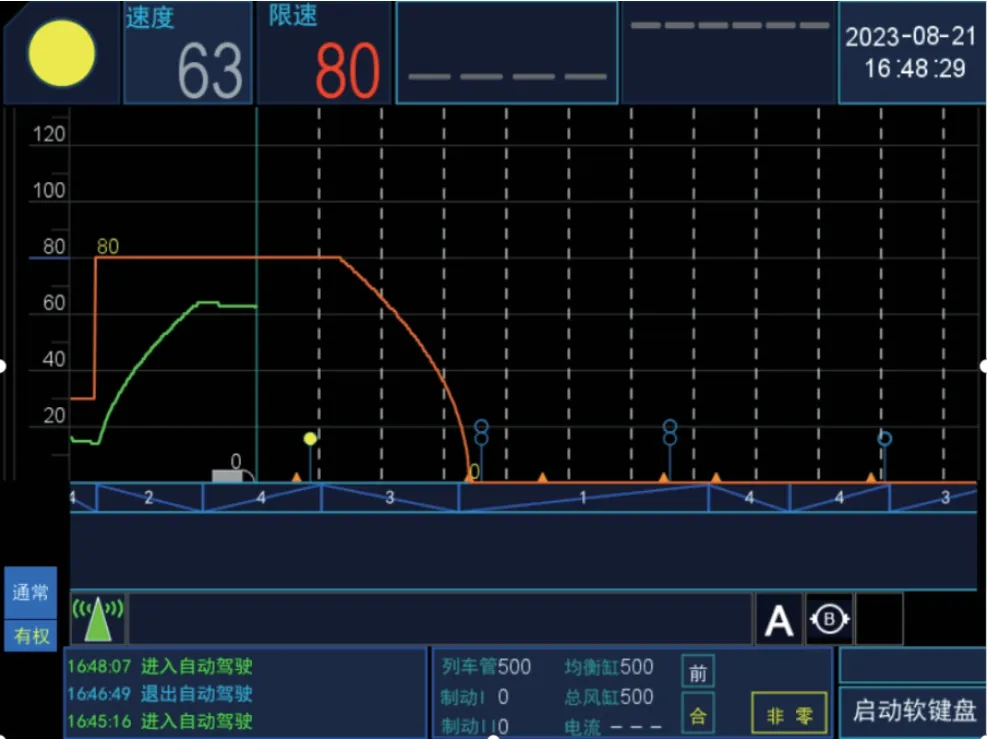
图6 自动巡航过程显示界面Fig.6 Automatic cruise process display interface
辅助驾驶设备根据列车限速及停车点位置等信息,计算列车电制动及空气制动施加时机及施加大小,列车将辅助驾驶设备施加级位及大小闸转换为列车加速度,最终控制列车在停车点前减速停车。辅助驾驶设备控制列车自动减速及停车过程如图7 所示。

图7 自动减速及停车过程显示界面Fig.7 Automatic deceleration and stopping process display interface
当司机选择辅助驾驶模式后,司机将手动控制列车牵引及制动,列车辅助驾驶设备根据列车基本信息、线路条件及列车当前速度位置等计算列车辅助驾驶曲线,同时将给出列车在当前周期推荐级位及大小闸位置,司机可参考辅助驾驶推荐信息控制列车运行。手动控制列车起车后辅助驾驶曲线显示界面如图8 所示,其中绿色曲线为列车实际运行曲线,蓝色曲线为辅助驾驶曲线。
手动控制加速至82 km/h 后,辅助驾驶曲线显示界面如图9 所示。

图9 加速至82 km/h后辅助驾驶曲线显示界面Fig.9 Assisted driving curve display interface after acceleration to 82 km/h
辅助驾驶系统串口时间数据打印如图10 所示。辅助驾驶系统向平台发送数据,平台收到数据后,辅助驾驶经过200 ms 会再次向平台继续进行数据发送。根据记录可以看出辅助驾驶与平台交互时间稳定为200 ms 一次,证明平台能够支持与辅助驾驶系统之间每200 ms 进行一次通信。辅助驾驶系统具备实时处理能力,并能持续稳定进行数据发送。
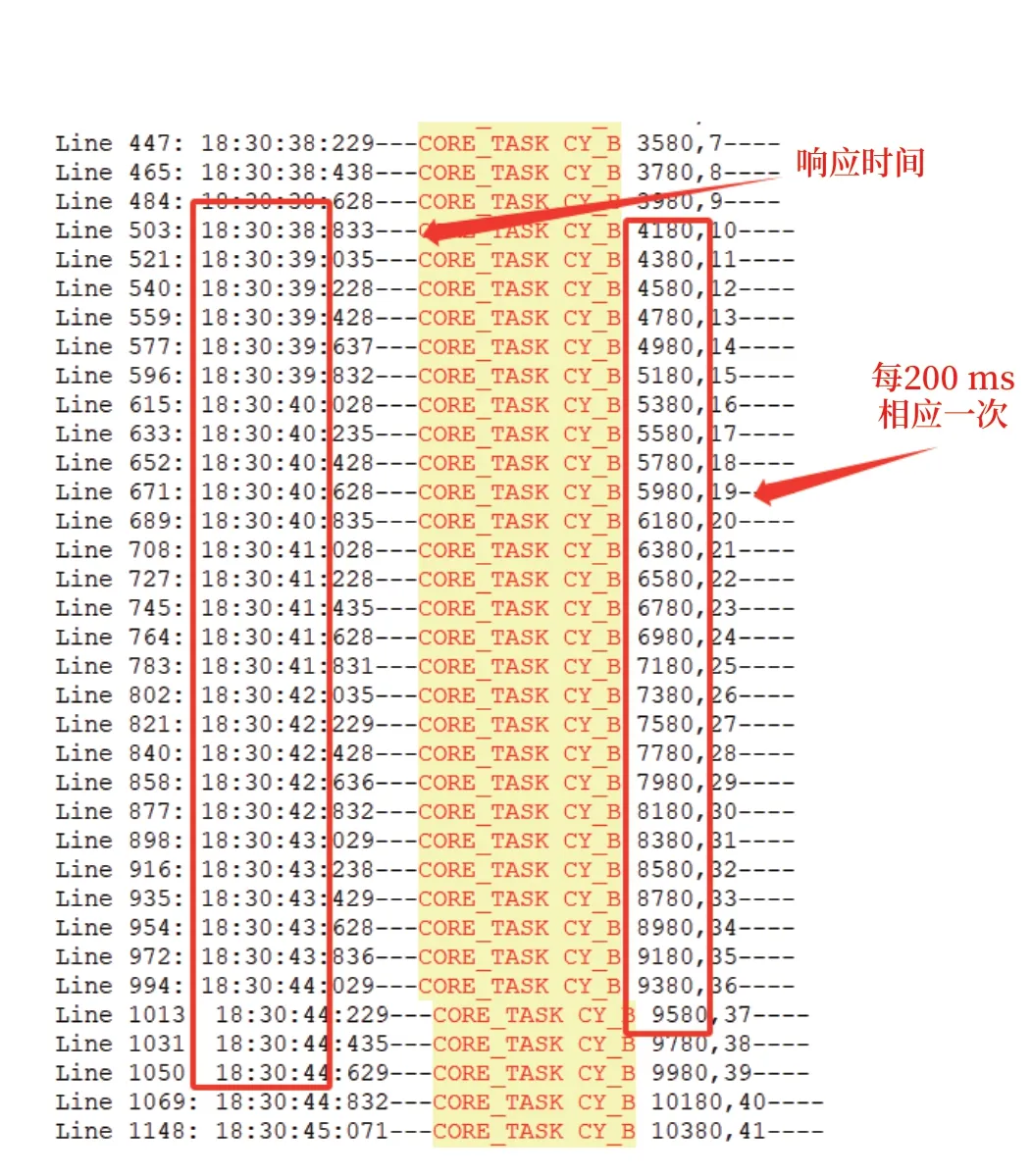
图10 串口数据打印Fig.10 Serial port data printing
辅助驾驶设备在运行过程中会进行数据记录,记录仿真过程中的关键数据,如列车速度、位置、控制输入等。这些数据可以用于系统性能评估、故障分析和算法改进。
通过实验验证,本论文所提出的基于虚拟现实技术的仿真平台在准确性能评估和功能测试方面表现出色。利用该平台,研究人员可以根据实际需求设计和优化机车辅助驾驶系统的功能和算法。同时,该平台还可以帮助培训机车司机,提高其对机车辅助驾驶系统的熟悉程度,从而提高驾驶安全性。
6 结论
本文通过设计基于虚拟现实技术的仿真平台,实现对适用于重载列车的机车辅助驾驶系统的准确评估和测试,为适用于重载列车的机车辅助驾驶系统的研究和开发提供了强有力的支持,该平台能够准确模拟各种驾驶场景和交通情况,并提供了平台设计的详细方法和实验验证的结果。未来的研究可以进一步优化该仿真平台的性能和功能。重载列车辅助驾驶系统仿真平台的设计有助于在安全、经济的环境中开发、验证和优化系统,提高系统的性能、可靠性和应急响应能力。同时,为相关人员提供培训和技能提升的机会,确保他们能够熟练操作和维护系统。
猜你喜欢
中国设备工程(2023年2期)2023-02-13
河北理科教学研究(2021年3期)2022-01-18
发明与创新(2021年39期)2021-11-05
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
装备制造技术(2021年2期)2021-07-21
小学生学习指导(低年级)(2019年6期)2019-07-22
铁道通信信号(2019年2期)2019-03-26
中国铸造装备与技术(2017年3期)2017-06-21
材料科学与工程学报(2016年1期)2017-01-15
