低快拍下混合信号DOA快速估计算法
2024-01-30 14:51纪晓东
系统工程与电子技术 2024年2期
姚 震, 杨 闯, 纪晓东
(北京邮电大学网络与交换技术国家重点实验室, 北京 100876)
0 引 言
信号波达角(direction of arrival, DOA)的精准估计是阵列信号处理的核心关键技术之一[1],在雷达、探测、移动定位等领域不可或缺[2-5]。快速的信号DOA估计有助于在电子战中对对方目标进行定位及追踪,同时在民用领域中的无线电监测、移动通信等分支领域中有着重要应用价值。
在实际环境中,信号通常以非相干信号和相干信号混合形式存在。信号的相干性致使传统空间谱估计算法产生秩亏损[6],使得相干信号DOA难以估计[7]。在近代空间谱估计研究中,针对相干信号DOA估计的主要方法是恢复协方差矩阵的秩损失,其中较为经典的方式是结合空间平滑算法补偿损失的秩[8],将阵列分为多个互相重叠的子阵列,然后对这些子阵列输出的协方差矩阵进行均值计算预处理,以形成恢复满秩的协方差矩阵。在此方法基础上,很多改进算法面向具体阵列及场景条件演变而来[9]。
文献[10]针对时-空欠采样下入射信号的频率和DOA估计问题,提出基于谱校正和中国余数定理的联合估计算法,无需对源信号进行多次欠采样,耗时更短,更适用于快速时变目标的估计,且该算法在低信噪比(signal to noise ratio, SNR)情况下亦可实现很高的成功检测率。文献[11]基于最大似然估计,设计了一种新型检测架构,基于似然比的决策规则对空间相干信号进行估计,在相同条件下具有更好的估计精度。文献[12]将时间反转(time reversal, TR)技术和信号子空间方法结合,采用TR算法分析多径效应,提高SNR,使用信号子空间算法将信号压缩到预定义的子空间中,实现了对空间相干信号的估计,相比于传统算法具有更高的精度及更好的鲁棒性。文献[13]针对多媒体应用中的宽带信号,提出了一种基于最大似然估计的多重信号分类(multiple signal classification, MUSIC)子空间估计方法,针对高SNR情况,与传统估计算法相比具有更好的性能。文献[14]基于前向部分和后向部分托普利兹矩阵重构,改进了旋转不变子空间算法,利用样本协方差矩阵的半行重构数据矩阵来克服相干信号间的相位差。与类旋转不变子空间方法相比,在估计精度和估计分辨率方面具有更好的性能。然而,上述算法均基于空间谱理论对信号DOA进行估计,需要大量快拍支持,时间复杂度要求较高,在移动目标定位等实际场景中并不适用[15-18]。
21世纪提出的压缩感知理论可以解决低快拍下的DOA估计难题。基于压缩感知理论,结合稀疏重构算法,可以实现在低快拍条件下信号DOA的有效估计[19]。稀疏重构算法利用信号在空域的稀疏特性,对其信号进行重构,适用于低SNR、低快拍条件下的信号DOA估计。近年来,许多学者基于此类算法进行了进一步的研究。文献[20]使用两个阵元间距不同的均匀线阵,提出一种基于正交匹配追踪(orthogonal matching pursuit, OMP)算法的DOA估计方案,与传统OMP估计算法相比,针对相邻信号源具有更高的识别度并解决了相位模糊问题。文献[21]提出了一种基于聚焦的宽带离网源DOA估计方法。该方法的计算复杂度显著降低,接近于求解单个基于频率的测向问题。文献[22]提出了一种新的确定性和贝叶斯方法来识别相干多径信号的到达方向,利用相干信号传播的稀疏性和底层结构将相干多径信号的DOA估计问题表述为一个双凸优化问题,然后用交替凸搜索方法求解,提高了算法的鲁棒性。文献[23]假定目标源相对于接收机阵列位于离网位置。利用OMP算法[24]对稀疏样本重建,可以准确地估计信源的离网DOA。然而,传统稀疏重构算法对信号DOA估计的精度受限于初始观测矩阵误差,当初始观测矩阵误差较大时,对信号DOA估计的效果较差[25]。同时,传统的基于时域信号稀疏重构的算法受限于接收信号维度,需要多次迭代重构,耗费大量时间[26]。
为了解决以上问题,本文提出一种新型估计算法,耦合空间差分矩阵技术[27]与稀疏重构算法,利用空间差分矩阵将接收混合信号中的非相干信号和部分噪声信息滤除,得到仅含有效相干信号信息的空间差分矩阵,之后对空间差分矩阵特征分解,将特征值与特征向量加权获得新的观测矩阵。再对完备字典进行前后空间平滑处理,使其适应重构观测矩阵的维度,利用OMP算法对所得结果重构,得到相干信号的估计角度。而对于非相干信号,则直接利用空间谱估计算法对其DOA并行估计,结合最终得到整体信号DOA的估计结果。通过仿真验证,该算法在估计精度上高于基于空间差分矩阵的空间谱估计和传统稀疏重构算法,并在算法计算复杂度上低于基于空间差分矩阵的空间谱估计和传统稀疏重构算法。
1 阵列与信号模型
参考文献[28],本文以线性均匀阵列为例进行分析,假设接收阵列为M个阵元构成的一维直线阵列,第一个阵元的位置为0,阵列中每两个相邻阵元的间距为d,则阵列阵元位置信息可表示为
[0,d,2d,…,(M-1)d]
若空间有方向为θ的信号被该阵列接收,则该信号在阵列的方向矢量可表示为
(1)
式中:λ表示信号的载波波长。


(2)

而每个信号的单独导向矢量a(θ)可由式(1)得到。则此时,可得接收信号的协方差矩阵为
(3)

2 混合信号DOA估计
本节将对所提混合信号DOA估计算法的具体实施过程进行分析。
2.1 非相干信号DOA估计
首先对相干信号进行估计。式(2)表明,一组相干信号可以等效为一个非相干信号,整体信号的特征分解可表示为
(4)

由空间谱估计理论可知,信号的张成子空间可由导向矢量表示,且信号的张成子空间与噪声张成子空间正交。即信号的导向矢量与噪声子空间正交,所以可得
f(θ)=|aH(θ)Un|2=0,θ=θi,i=1,2,…,Q
(5)
每组相干信号的影响不能等同于一个等效虚拟信号,所以相干信号不能与非相干信号混淆。由此,对空间所有角度进行峰值搜索,符合式(5)的角度即为非相干信号的入射角度。
2.2 相干信号DOA估计
对于相干信号的估计,本文首先采用空间差分矩阵对接收信号预处理,处理过程借用前后空间平滑思想。因为信号协方差矩阵和噪声协方差矩阵都是Toepliz矩阵,则可利用反对称矩阵将其信息消除,得到仅含相干信号信息的协方差矩阵,滤除了非相干信号和噪声信息的干扰[29]。具体处理过程如下:选择子阵列数量为q,第m个子阵列的协方差矩阵为
(6)
式中:Km∈L(M-q+1)×M为选择矩阵,具体定义为
Km=[0(M-q+1)×(m-1)I(M-q+1)0(M-q+1)×(q-m)]
(7)
此时,可以定义该接收矩阵的q阶差分矩阵为
(8)

传统的稀疏重构算法利用信号在空域的稀疏性对信号DOA进行估计,以阵元接收向量Xθ作为观测矩阵,将空间以相同间隔划分为Nθ个网格,则过完备字典可表示为Aθ=[a(θ1),a(θ2),…,a(θNθ)],其中a(θ)由式(1)可得。此时,可以通过完备字典对观测矩阵进行迭代重构处理,恢复出所需的信号。但此种算法仅适用于时域信号,为了能够从协方差矩阵中重构所需信号信息,还需对接收协方差矩阵预处理以获得新的观测矩阵。由文献[30]可知,子空间张成向量对应的观测向量可由协方差矩阵通过特征分解得到的特征值与其对应特征向量组合获得,对式(8)中的空间差分矩阵Dq进行特征分解,可得
(9)

(10)
式中:λi和ei即为空间差分矩阵特征分解所得信号向量对应的特征值与对应的特征向量。
此时,已获得稀疏重构估计所需的观测矩阵,但因之前的空间差分矩阵预处理导致矩阵维度由M降低至M-q+1,因此原始的完备字典Aθ已不再适用于当前的观测矩阵。针对此问题,引入空间平滑思想,对完备字典同样进行空间平滑处理。与空间差分预处理时对子阵的划分保持一致,同样将其划分为q个子阵列,则第m个子阵列的完备字典可表示为
(11)
式中:Km可由式(7)计算所得。则前向空间平滑后所得完备字典可由各子阵的完备字典取平均求得
(12)
同时,后向空间平滑子阵的完备字典可由前向子阵完备字典与反单位阵计算求得
(13)
式中:J为维度(M-q+1)×(M-q+1)的反单位阵。则可得整体的完备字典为
(14)
此时,初始条件都已具备,即可选用稀疏重构算法对信号进行估计。本文采用传统贪婪算法中的OMP算法进行估计。整体思想为对每次迭代中选出的最佳原子重新组合成一个新的矩阵Ω,再由此矩阵生成重构信号s,从观测信号中减去其在矩阵Ω上的正交投的获得残差项,此时残差与已选择的原子总是正交的,从而可通过多次迭代获得重构信号。相干信号整体估计流程如算法1所示。此时,已获得相干信号的DOA估计值。该算法首先通过空间差分矩阵预处理,降低初始观测矩阵误差,又将其转为协方差矩阵下的估计,降低了计算复杂度。

算法 1 空间差分矩阵结合OMP估计相干信号输入 阵列接收信号向量X,子阵列数为q,相干信号个数L,观测完备字典Aθ输出 重构信号s步骤 1 对接收信号时域向量做空间差分处理,代入式(8),得到预处理后的空间差分矩阵Dq,滤除无关信息,此时获得仅包含相干信号信息的空间差分矩阵。步骤 2 对获得的空间差分矩阵特征值分解,得到对应的特征值与特征向量,代入式(10),并对其加权获得新观测矩阵e。步骤 3 对已有观测完备字典Aθ做前后空间平滑处理,代入式(14),获得预处理后的完备字典Ar。步骤 4 初始化残差项r0=e,所需原子支撑集Ω0=Ø,索引集Λ0=Ø,迭代次数i=1,对字典原子归一化。步骤 5 计算当前残差项ri-1与观测矩阵Ar中所有原子的内积,并找到对应内积最大值时原子的索引λi=argmax

步骤 8 计算新的残差值并记录ri=e-Ωis。步骤 9 将迭代次数加1,即i=i+1,同时判断迭代次数是否达到信号数量L,如果达到则算法结束,否则跳转至步骤5。步骤 10 输出重构信号s。
3 仿真结果及分析
为了验证所提算法的估计能力,本节将对其进行仿真验证,并与文献[29]中结合差分(spatial difference, SD)思想的SD-MUSIC算法、OMP算法[21]进行比较。首先对不同快拍数条件下的均方根误差(root mean square error, RMSE)和运行时间进行对比,证明所提算法在保持高精度的同时能够满足低运算复杂度。其次,分析不同SNR及不同阵元数情况下算法是否满足预期。最后,以表格数据直观分析验证所提算法的精确性。
3.1 所提算法可行性验证
本节采用均匀阵列进行仿真,假设阵元间距为信号波长的50%,在空间谱峰值搜索估计时将角度空间划分为等长的361个角度,使测向精度为0.5°。同时,将稀疏重构算法中网格划分角度精度设置为0.1°,即将空间网格划分为1 800个网格。此时,设置初始阵元数为30,并将此30个子阵元划分为3个子阵列,环境SNR为10 dB,快拍数为500。为了不失一般性,对空间信号入射初始角度进行随机设置。现假设空间中存在4个非相干信号,入射角度分别为-52°、-25°、4°、36°,同时还存在3组相干信源,每组相干信源的入射角度分别为[-40°、28°]、[-11°、48°]、[12°、56°],同时设置每组相干信号的相干系数分别为[0.500+0.866i、0.223+0.975i]、[0.707+0.707i、0.309+0.951i]、[0.809+0.587i、0.766+0.643i]。此时对这些信号分别通过SD-MUSIC算法、OMP算法及本文所提算法进行仿真,均可得到准确估计值。
3.2 不同算法性能分析对比
为了验证所提算法在低快拍条件下的性能优势,设置入射角度随机的4个非相干信号和3组相干信号组,其中每组相干信号组中含有2个相干信号,且设置其相干系数随机。将初始阵元数降低至24以更适用于工程实践,计算不同算法在低快拍条件下的RMSE,定义如下:
(15)

本次实验以4个快拍为一个间隔,从4快拍增加至32快拍,针对相同初始条件下的接收信号进行估计并记录不同快拍条件下不同算法执行时间的平均值。蒙特卡罗实验次数设置为10 000,所得RMSE对比及运行时间对比如图1和图2所示。从图2所示结果可以看出,对于SD-MUSIC,难以满足在低快拍下的准确估计。而传统OMP算法精度略低于所提算法。为满足实际场景需要,在16快拍以下时,误差较大,所测结果不稳定,因此对16快拍以上的情况进行分析对比,此时OMP算法估计时间远大于所提算法,因此所提算法相比于空间差分矩阵直接估计和传统OMP算法估计具有更好的估计性能。
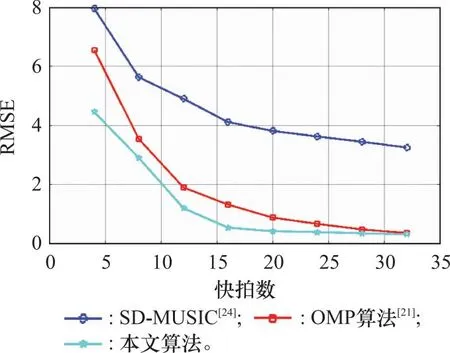
图1 24阵元、SNR为10 dB、不同快拍条件下不同算法的 DOA估计RMSE对比结果Fig.1 Comparison results of RMSE of DOA estimation of different algorithms under different snapshot conditions of 24 array elements and SNR of 10 dB

图2 24阵元、SNR为10 dB、不同快拍条件下不同算法的 DOA估计平均运行时间对比结果Fig.2 Comparison results of the average running time of DOA estimation of different algorithms under different snapshot conditions of 24 array elements and SNR of 10 dB
为了说明本文所提算法的鲁棒性,本文在不同SNR情况下同样对不同算法的RMSE进行分析对比。仿真条件同样选用在24阵元情况下以4个快拍为一个间隔,快拍数从4增加至32,设置4个非相干信号及3组相干信号,每组相干信号中有2个接收信号,设置非相干信号和相干信号的入射角度随机且每组相干信号中不同信号间的相关系数随机,并设置所有信号平均功率相同。考虑适配实际工程场景,针对SD-MUSIC与OMP算法及本文所提算法,在SNR为20 dB和0 dB时分别进行10 000次蒙特卡罗仿真实验,所得RMSE对比结果如图3和图4所示。通过图3和图4的RMSE直观对比可以看出,所提算法在信号估计稳定性上优于传统OMP估计算法,更适用于实际环境(如电子战场景下的)移动目标定位。

图3 24阵元、SNR为20 dB、不同快拍条件下不同算法的 DOA估计RMSE对比结果Fig.3 Comparison results of the RMSE of DOA estimation of different algorithms under different snapshot conditions of 24 array elements and SNR of 20 dB

图4 24阵元、SNR为0 dB、不同快拍条件下不同算法的 DOA估计RMSE对比结果Fig.4 Comparison results of the RMSE of DOA estimation of different algorithms under different snapshot conditions of 24 elements and SNR of 0 dB
此外,本文在24阵元、16快拍的初始条件下进行仿真实验分析。同样设置4个非相干信号及3组相干信号,每组相干信号中有两个接收信号,同样设置非相干信号和相干信号的入射角度随机及每组相干信号中不同信号间的相关系数随机,并设置所有信号平均功率相同。考虑实际场景的接收环境,将SNR由-5 dB开始设置,每5 dB为一间隔,增加至30 dB,仿真实验计算不同算法的RMSE如图5所示。通过仿真实验结果可知,所提算法的估计性能在不同SNR下都优于SD-MUSIC算法和OMP算法。此外,为了验证阵元数变化对算法性能的影响,本文在16快拍、SNR为10 dB的条件下对相同初始信号进行10 000次蒙特卡罗实验。待估计信号总数量为10,为了保证不同算法能够准确估计所有信号,将阵元数从12开始,每4个阵元数为一间隔,增加至32阵元,并记录RMSE结果如图6所示。如图6所示,在24阵元后,阵元数对估计结果影响收效甚微。
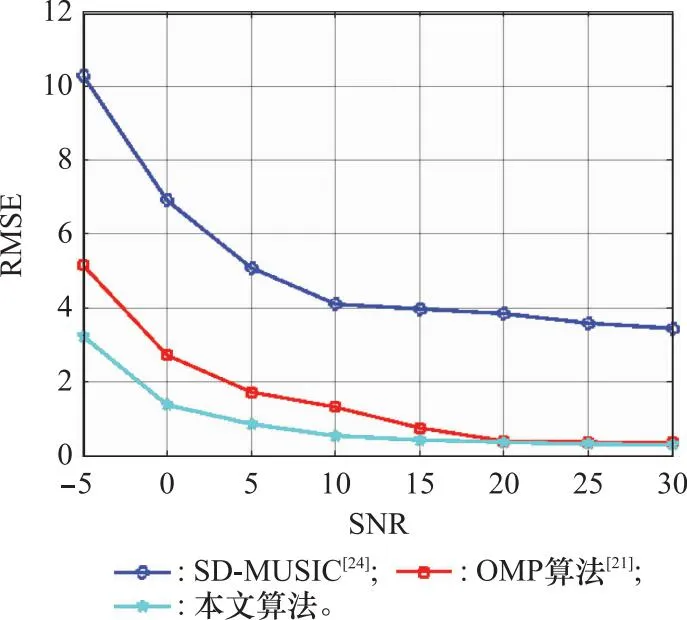
图5 24阵元、快拍数16、在不同SNR条件下不同算法的 DOA估计RMSE对比结果Fig.5 Comparison results of RMSE of DOA estimation with different algorithms under different SNR conditions with 24 array elements and 16 snapshots

图6 SNR为10 dB、快拍数16、不同阵元条件下不同算法的 DOA估计RMSE对比结果Fig.6 RMSE comparison results of DOA estimation of different algorithms under different array element conditions with the SNR of 10 dB and 16 snapshots
最后,为了直观地表达本文所提算法在运行耗时上的优势,对不同算法在快拍数为10、SNR为10 dB、阵元数为24的情况下的RMSE和运行时间精准记录在表中,如表1所示。从数据直观对比可以看出,本文所提算法在相同初始条件下具有更优的性能。

表1 阵元数为24、快拍数为10、SNR为10 dB时不同算法性能对比
4 结 论
本文提出了一种新型复合算法对混合信号进行快速DOA估计。所提算法耦合空间差分矩阵和稀疏重构对非相干和相干信号分别进行估计,通过更新稀疏重构的完备字典集,引入空间平滑预处理以降低DOA估计时间。仿真验证结果表明,所提算法在低快拍条件下仍可保持高精度估计性能,且时间复杂度远小于传统稀疏重构算法和空间差分估计算法,可以有效提升DOA估计的速度,增强目标追踪性能。
猜你喜欢
家教世界(2023年28期)2023-11-14
家教世界(2023年25期)2023-10-09
新世纪智能(数学备考)(2021年5期)2021-07-28
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
创新作文(小学版)(2016年19期)2016-08-22
读者(2016年14期)2016-06-29
自动化学报(2016年8期)2016-04-16
信息安全研究(2015年3期)2015-02-28
太空探索(2014年1期)2014-07-10
四川生理科学杂志(2014年2期)2014-02-28