基于VS-IRL 的继电保护装置测试研究
2024-01-29 02:23李宇节王雅男
电子器件 2023年6期
张 强,李宇节,祝 爽,王雅男,郑 磊
(国网四川雅安电力(集团)公司,四川 雅安 625000)
收稿日期:2022-11-01 修改日期:2022-12-28
现如今,由于复杂的智能电网网络的形成以及日益增长的需求,电力系统运行接近其额定容量。如果没有迅速发现且隔离故障,就可能导致这种高度互连的网络级联跳闸[1]。使用距离继电保护装置是传输线全站保护的常用做法,当阻抗轨迹触碰到其第三区工作边界时,它就会触发[2]。然而,严重的突发事件,如线路中断、网络隔离等都可能导致第三区中继误操作的应力场景。在这里,术语“应力场景”指的是无故障的情况。近期有关停电的研究表明,在这些动态应力的情况下,距离继电保护装置第三区误动作是导致电力系统级联故障的主要原因。在这种突发情况下,功率摆动和负荷侵占是设计备用保护方案时需要考虑的主要问题[3-4]。
上述方案利用局部中继信息在应力条件下识别故障。目前在广域测试、控制和保护方面的进展是在广域测量系统(Wide Area Measurement System,WAMS)中使用时间同步相量测量单元(Phasor Measurement Units,PMUs)。提出了可以实现一对分类器的自适应技术来区分故障和应力场景[5-7]。
在本文提出的方法中,利用实时脆弱性研究(Vulnerability Studies,VS) 和智能中继逻辑(Intelligent Relay Logic,IRL)来识别应力情况下的故障,设计了一种增强的广域距离继电保护算法,用于测试常规的第三区备份中继。在远距离继电保护装置发生不希望发生的跳闸之前,应计算一个适当的继电保护装置脆弱性指数,并利用其对任何运行状态下的关键继电保护装置进行排序,来估计脆弱性的强度。WAMS 数据从放置在关键位置的PMU中检索,以提取输入特征并计算继电保护装置的运行裕度以及对负载功率的敏感性。VS 检测传统的第三区中继阻塞的脆弱继电保护装置,IRL 激活,以区分故障和应力情况。
本文通过实时仿真研究,搭建了基于DDRTS 的虚拟化、数字化仿真模型系统,实现了对继电保护装置的精确仿真。通过仿真结果可以看出,该系统的建立能够满足全站继电保护自动测试的需求,能够简化现场调试工作、提升工作效率、减少停电时间、降低“三误”事故概率,为推动继电保护技术变革及管理创新提供技术支撑。
1 第三区测试算法
在继电保护系统中,对容易受到攻击的继电保护设备进行识别是非常重要的。这是因为如果这些设备受到攻击,可能会导致继电保护系统失效,从而导致电网发生故障或事故。因此,对于容易受到攻击的继电保护设备进行识别,可以采取相应的安全措施来保护这些设备,例如设置物理障碍、使用电磁屏蔽材料、加密网络通信等,从而保证继电保护系统的可靠性和安全性。
在本文中,主要根据应力条件,使用脆弱性研究方法来对继电保护装置进行检测。严重的应力条件显著影响为传输系统提供全站保护的距离继电保护装置的第二区和第三区操作。由于大部分的继电保护装置误操作都与距离继电保护装置的第三区有关,因此本文的研究工作是为第三区监管服务的。但是,为了使其更具有一般性,还应制订第二区测试计划,这可能需要改变框架和分析方法,并将作为今后工作的一部分加以考虑。
本文提出了利用常规的第三区协同运行,结合脆弱性研究和智能中继逻辑,在有应力的条件下,距离中继会发出第三区运行的跳闸/阻塞信号指令。图1给出了第三区中继测试算法的结构。
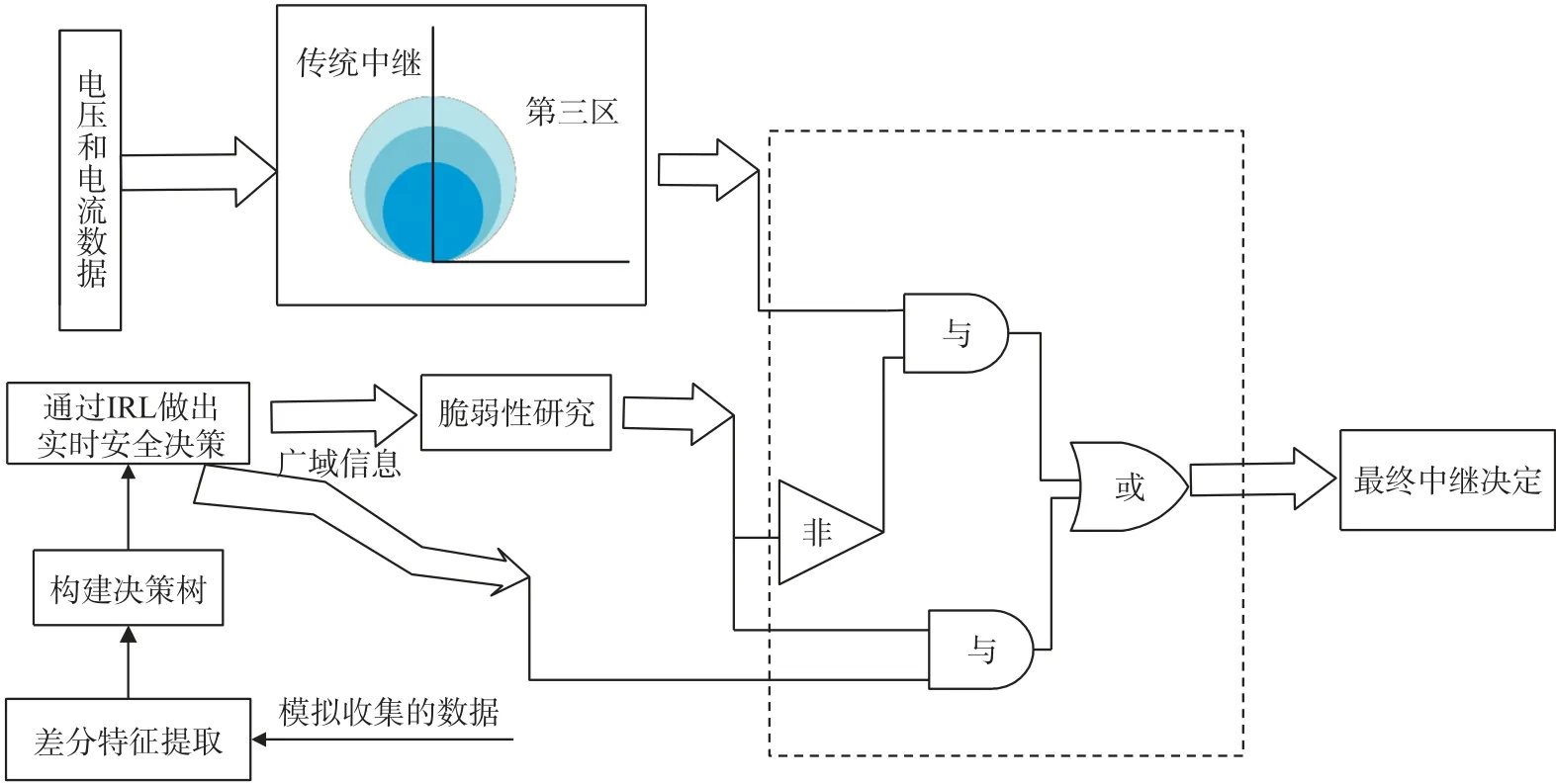
图1 WABP 方案示意图
IRL 对从广域信息中提取的特征进行处理,给出实时安全决策,并将数据集分类为“无故障/应力状态”或“故障状态”。IRL 为任何故障情况和距离继电保护装置跳闸产生的输出“1”。当IRL 显示输出为“0”时,这是一个“无故障”的情况,距离继电保护装置不操作。因此,VS、传统的第三区和IRL 的共同作用决定了最终的继电运行。
该方案利用扩展卡尔曼滤波(Extended Kalman Filter,EKF)技术开发的PMU 来估计相量和随后的特征检索,因为这些PMU 估计基本相量的效率比现有PMU 更好。其中系统中的每条线路都应连接到带有PMU(busp)的总线,或保持在至少两个busp的第三区覆盖范围内。在称为busN的其他总线上无法访问度量值。在任意busN的情况下,使用传输线的长线模型估计电压。线路参数的计算使用本文所提出的技术完成。系统中busN的电压相量按下列方法估计:
式中:Vp和Ip分别为busp处的正序电压和电流相量,l和γ分别为线的长度和传播常数,ZC为特征阻抗。
2 脆弱性研究
2.1 继电保护装置工作裕量(ROM)的概念
对于任何电力系统事件,ROM 决定了哪些VR已经跳闸或即将跳闸。任何扰动的后效,如级联故障、发电/负载切换和网络分离,都可以利用ROM值可视化[8]。
对于第三区距离继电保护装置,对于任意线路i-j,继电保护装置ij的继电保护装置工作裕量(ROMij)计算为:
式中:Zijc是关于第三区中心的视阻抗,ρij是第三区半径。如Zij为从原点测量到的继电保护装置所见阻抗,Rijc和Xijc为3 区边界中心的x-y坐标,则ROMij可由:
如果阻抗侵入工作边界,ROMij为负,距离继电保护装置命令跳闸决策。设Vi、Vj为幅值,θij为线两端电压相位差,则i-j中的复潮流Sij为:
2.2 相关操作裕度对母线电压的敏感性
灵敏度研究可以确定操作裕度轨迹的变化率,即ROM 相对于母线电压或负载功率注入的变化。因此,它可以作为判断距离继电保护装置在任何突发事件下的脆弱性的指标。
在某一工作点,继电保护装置操作裕度对负载功率的灵敏度由以下公式进行表示:
式中:ΔP和ΔQ分别为有功功率和无功功率的变化量。SRP、SRQ分别为继电保护装置操作裕度对有功功率和无功功率的灵敏度。
这些可以用雅可比矩阵M表示为母线电压的变化(角度和幅度):
2.3 中继的脆弱性指数
如前所述,在任何动态应力条件下,如功率摆动和负荷侵占,继电保护装置操作裕度减小,且继电保护装置操作裕度对母线电压的敏感性增加。结合这两个参数,计算出一个因子继电保护装置脆弱性指数(Relay Vulnerability Index,RVI),根据脆弱区第三区的严重程度对继电保护装置进行排序,确定高度脆弱继电保护装置集合。可计算为继电保护装置操作裕度(如式(4)所示),其表达式为:
3 智能中继逻辑(IRL)的制定
为了提高远程中继的运行效率,设计了一种基于决策树(Decision-making Tree,DT)的决策逻辑,以区分故障和应力情况。
3.1 理论背景
DT 基本上由一些简单而准确的规则组成,这些规则应用if-then 语句对数据集进行分类。DT 模型必须使用足够数量的相关数据集,并为每个数据集预定义类[9]。
3.2 输入属性的选择
仅仅使用正序电压相量信息不足以将应力情况与对称故障区分开,因为它们的特征往往相似。因此,一些额外的特性,即有功功率和无功功率及其导数作为输入,以提高精度水平。
从图2 所示的变量重要度图和DT 结构可以看出,x7(即dQ/dt)和x3(即ΔI)是最重要的输入特征。因此,线路中的ΔI是区分故障与无故障的主要特征,而dP/dt和dQ/dt特征进一步提高了从功率波动、电压不稳定和负荷侵占这些场景中分类故障的分辨率。
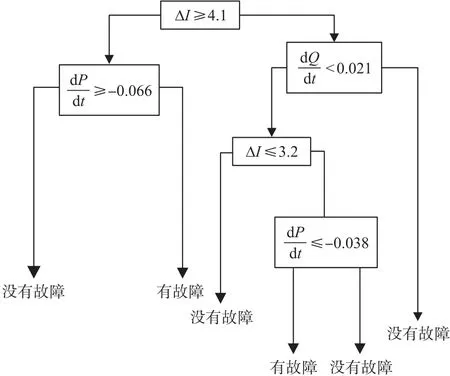
图2 IEEE 39 总线系统(R29-28)故障识别的DT 模型
3.3 智能中继逻辑示意图
算法流程图如图3 所示。

图3 算法流程图
4 系统测试与结果分析
采用MATLAB/Simulink 平台,在图4 所示的IEEE 39 总线系统上对所提出的WABP 方案进行了测试。

图4 IEEE 39 总线系统单图
4.1 脆弱性测试
考虑一个在线路29-26 上产生的三相故障持续了一定的时间,然后通过打开断路器清除。HVR集的RVI 值为负值或非常小的正值。可能遇到功率波动的继电器根据RVI 值进行排名,见表1。
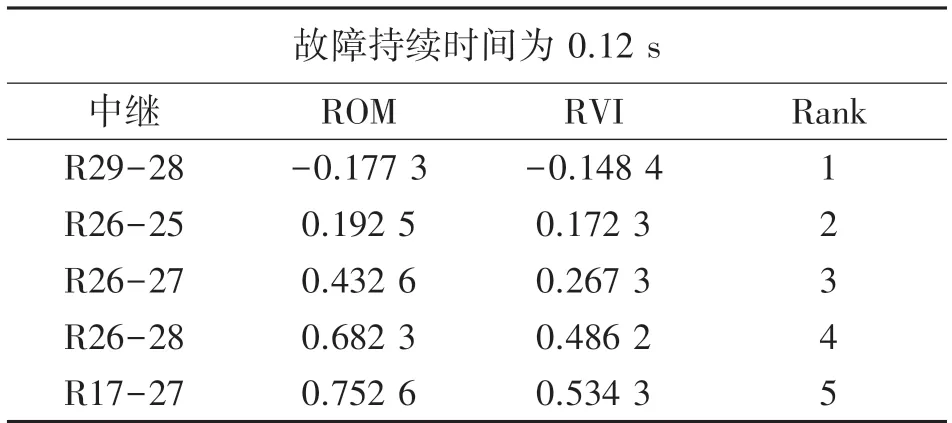
表1 RVI 指数:功率摆动场景
在特定条件下,距离继电保护装置所看到的表观阻抗可以侵犯其第三区域边界,可能导致继电保护装置R29-28 和R25-26 的过失跳闸。具有负RVI 值或非常小的正RVI 值的继电保护装置可称为高度脆弱。表2 显示了根据RVI 值或本例的漏洞严重程度排序的中继排名。
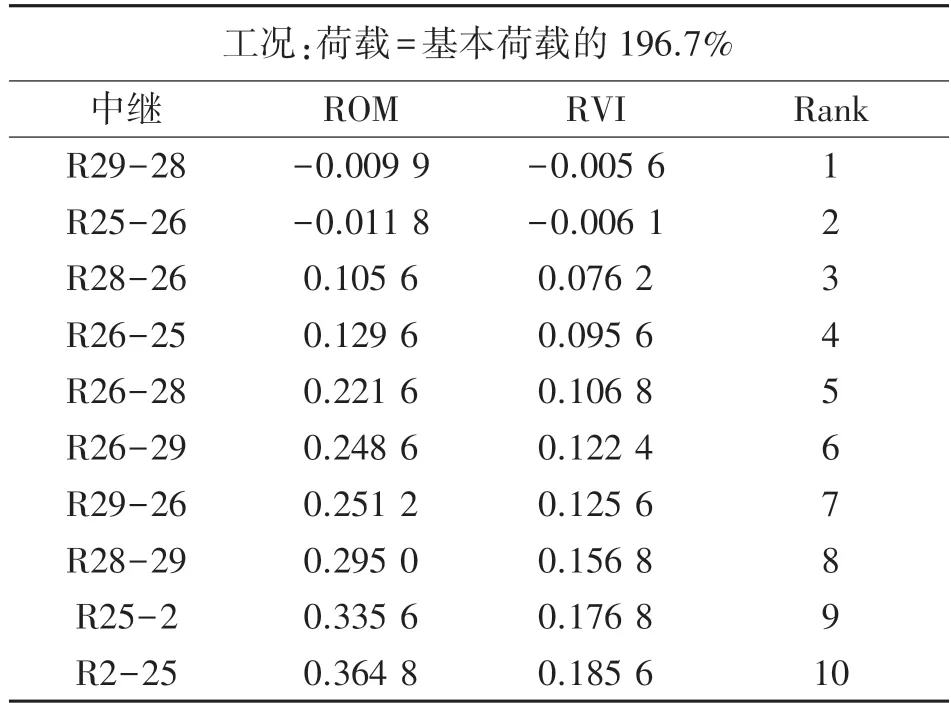
表2 RVI 索引:负载侵占场景
4.2 IRL 逻辑的性能测试
为了检验该算法对测量噪声(PMU 测量中的误差)的鲁棒性,噪声会添加到幅度和相位角测量中。将信噪比为20 dB 的高斯白噪声添加到测试数据中,通过输入该噪声对训练好的DT 模型进行测试。IRL 逻辑在测试系统不同继电保护装置测量噪声下的故障检测精度如表3 所示。测试精度表明本文的模型不受噪声影响。对于不同的故障位置、不同的故障电阻、不同的故障类型、不同的故障线路以及不同的功率摆动的故障清除时间,可以合理地预测故障和无故障情况。

表3 预测不同继电保护装置的IRL 逻辑精度
4.3 不同运行场景下的性能
在稳定功率摆动的情况下,经过一定的时间后,线路中的功率流趋于稳定。然而,在严重的角度不稳定期间,继电保护装置可能面临电流和电压的大振荡。如果故障清除时间过长,可能会出现不稳定振荡,发电机可能会出现失步。
5 实时数字模拟器平台的硬件实现
实时数字模拟器(Real-time Digital Simulators,DDRTS)这种基于微机的实时数字仿真系统 具有建模方便、成本低、升级容易、良好的可扩展性和兼容性等优点,是进行电力系统实时数字仿真的一个重要工具[10]。
5.1 DDRTS 系统的组成
DDRTS 系统主要由两部分组成,分别为硬件部分和软件部分。
DDRTS 系统的硬件部分主要包括:①微机:对所模拟的系统进行动态实时仿真;②高速信号通信系统:主要用于微机和信号转换及输入输出系统之间的数据通信;③信号转换及输入输出系统:主要进行信号模拟量转换为数字量、数字量转换为模拟量以及开关量的输入和输出,包括A/D、D/A、I/O、O/I 四个单元;④功率放大器:进行电压或电流的幅值、相位、频率的调节。
DDRTS 系统的软件部分包括:①电网电磁暂态仿真程序:是电网数字动态实时仿真系统的重要组成程序。②图形化电力系统仿真建模系统:全中文图形界面,可以方便快速地搭建数字仿真系统模型,进行系统的仿真计算,分析系统的稳态、暂态和动态行为。③实时仿真进程控制系统:进行实时通信、同步控制、信号转换和输入输出量的处理等。④DDRTS 系统辅助功能模块:继电器测试程序、数字动态谐波测试程序、数字动态实时回放测试程序等。
5.2 DDRTS 系统仿真及分析
为了验证算法的有效性,本文在DDRTS 平台上实现该方案,作为控制器硬件在环(Controller Hardware In Loop,CHIL)测试的一部分。为了实现基于底层接口的CHIL 测试,实现了浮点数字信号处理器(Digital Signal Processor,DSP)。在CHIL 测试中,通过Code Composer Studio 将本文的算法集成到DSP板上,该基于DSP 的控制器作为测试硬件。由于接口是在电压+/-10 V 同时电流范围<50 mA 之间的低电平信号下完成的,因此在CHIL 测试中不需要额外的接口工具。
DDRTS 的千兆收发模拟输出(GTAO)/数字输入(GTDI)卡用于外部控制器、硬件PMU 和RSCAD中的系统模型之间的接口。从DDRTS 的模拟输出通道中采集7、9 和4 总线的三相瞬时电压和电流信号,并送至PMU。
控制器发出的trip 命令发送到测试系统的相关断路器。表4 给出了具有故障检测响应时间的CHIL 测试下该方案的性能。考虑到处理、相量信息复用、PDC 数据提取的总时延为100 ms~110 ms,控制器对命令脱扣信号的响应时间为10 ms~15 ms,最脆弱继电器的平均故障检测时间在115 ms~125 ms 之间,如表7 所示。结果表明,本文的方案能够准确区分应力情况和故障情况,响应时间较短。

表4 DDRTS 平台C-HIL 测试结果
6 结论
由于常规的第三区算法在功率摆动、负荷侵占和电压不稳定等应力条件下容易出现误操作,因此有必要对第三区进行监管和测试,以提高保护运行的安全性。
本文提出的方案定义了一个因子,继电保护装置脆弱性指数,用于在任何干扰期间对高度脆弱的继电保护装置进行排名。这种脆弱性研究逻辑为高脆弱性继电保护装置的第三区发出阻断信号。此外,它将操作从传统的第三区中继切换到智能中继逻辑,使用广域信息进行实时安全决策。进行相关仿真,提取输入差分属性,用于训练区分故障和应力情况的决策树模型。
对IEEE 39 总线系统的结果分析表明,在不同的操作条件下,传统的第三区故障跳闸都具有优异的性能。在DDRTS 平台上的CHIL 测试表明,该算法在实时场景下具有较高的有效性。因此,本文提出的方案可以有效测试继电保护装置的运行状态,避免可能引发级联故障的中继错误操作,并增强第三区保护的安全性。
猜你喜欢
电信科学(2017年6期)2017-07-01
电子制作(2017年10期)2017-04-18
电信科学(2016年10期)2016-11-23
自动化学报(2016年5期)2016-04-16
电测与仪表(2016年2期)2016-04-12
航天器工程(2015年3期)2015-10-28
核科学与工程(2015年2期)2015-09-26
电测与仪表(2015年5期)2015-04-09
电子设计工程(2015年16期)2015-02-27
电测与仪表(2014年12期)2014-04-04