
改进型北斗定位的海上安全与通信系统设计与研究
2024-01-27 02:59赵凤龙
自动化与仪表 2024年1期
赵凤龙
(交通运输部北海航海保障中心天津通信中心,天津 300451)
随着我国海上业务的不断发展,大型船只作业也越来越频繁,但由于船只变方向的周期较长,导致船只碰撞率的增加,所以构建一个北斗定位的海上安全与通信系统迫在眉睫[1]。
针对上述问题,文献[2]提出利用RS、GPS 定位和无人机组成一个三维体结构来实现对电网系统电缆局部放电检测,这种方法能够全面得到系统完善的放电数据,也能达到实时监测的目的,但是利用的技术造价较高,设备较昂贵;文献[3]提出利用物联网来解决定位数据源传输的问题,此方案虽然能够全面快速的达到数据传输的效果,但在使用过程中,其安全性不稳定,容易造成数据丢失等情况,不利于系统的稳定和安全;文献[4]提出SAR 图像船舶目标定位方法,该方法通过采集船舶SAR 图像,利用图像处理方式得到船舶目标位置,但该方法采集的船舶SAR 图像清晰度低,导致其定位船舶目标位置存在较大的偏差。
针对上述不足,本研究设计了一个北斗定位技术的海上安全与通信系统,旨在进一步提高航线的正确度和距离的安全度。
1 北斗定位系统的实施
北斗定位系统功能框图如图1 所示。

图1 系统融合示意图Fig.1 Schematic diagram of system fusion
图1 中,各传感器将检测的信号分解成两路信号,一路是脉冲信息,一路是行波信息。所有信息都经过芯片采样处理,采样中心将电缆局部放电区出现时间记录[5],检测信息通过北斗短信通信发送到电力系统主机,然后通过双端法计算距离,以便于定位实施。
信息采集模块:信号首先由FPGA 分析,采集模块收到的二次信号转化成多路模数转换集成电路端口可容纳的信号,对北斗的电文进行解调;然后和内部通信协议进行对接,进一步转换成数字信号传递到ARM 中;最后传递到电力监控部门[6]。
北斗相关传输数据如表1 所示。具体定位实施步骤如图2 所示。由图2 可知,北斗系统依照码跟踪和载波跟踪计算出原始震荡波和反射震荡的时间差,结合信号传输速度,能够实现对局部海上区域的准确定位。但是该系统接收的定位信息较单一,实时度较差,所以,本研究通过移动互联技术对其进行改进。

表1 北斗传输数据Tab.1 Beidou transmission data

图2 北斗实施流程Fig.2 Flow chart of Beidou implementation
2 改进型北斗定位海上安全与通信模型设计
本研究利用移动互联技术对北斗系统进行改进,系统框图如图3 所示。

图3 北斗系统框图Fig.3 Block diagram of the Beidou system
由图3 可知,北斗定位系统实现了对无线通信网络的覆盖,尤其是北斗短报文通信的制定,克服了众多因环境原因造成的通信盲区的问题。对本研究海上定位区安全航行距离数据的实时获取达到了精确定位和信息快速传输的目的[7]。
北斗海上安全与通信逻辑模型如图4 所示。由图4 可知,将系统运用船舶或海上设备,通过系统终端的综合船桥系统和综合平台管理系统获取通信节点状态来推论船舶安全信息,由北斗系统RDSS数据通道发送到陆地管理终端[8],达到及时、准确地获取船舶海上安全状态信息的目的,实现船舶和陆地管理用户间的安全信息互联互通,提高安全管理水平。
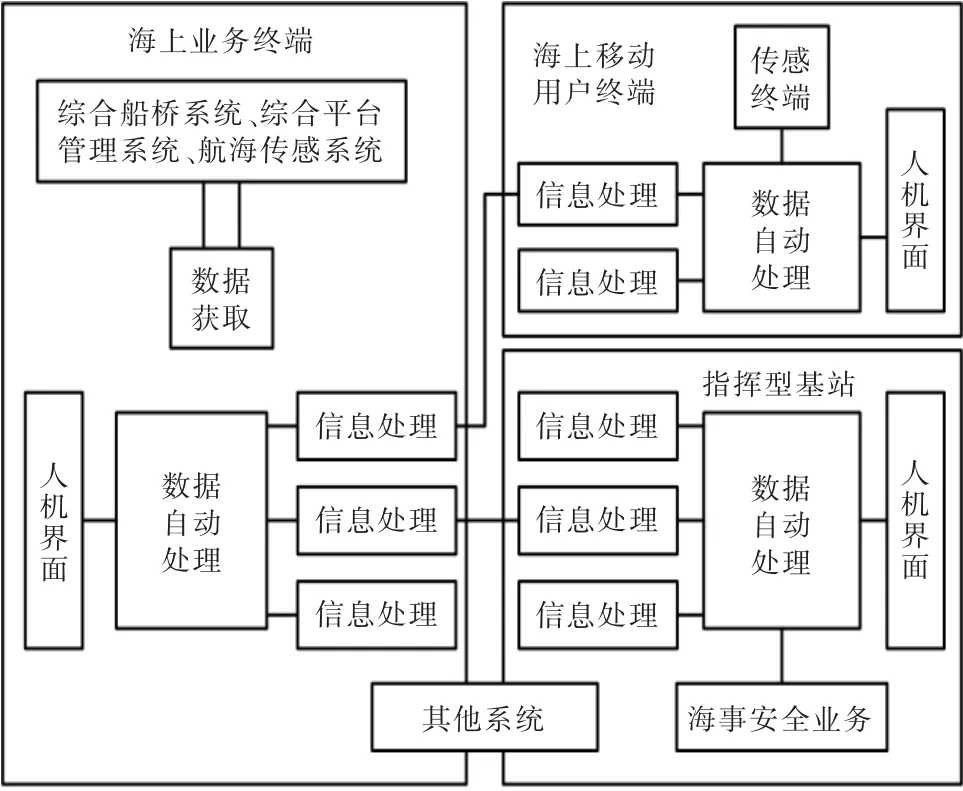
图4 北斗海上安全通信模型Fig.4 Beidou maritime security communication model
通过北斗系统RDSS 数据通道接收海上安全信息的业务,进一步提高船舶的海上航行安全度。
3 移动互联技术的船只通信定位模型设计
在船舶移动互联网络内,本研究使用Q×Q 表示该通信网络内的一个海区,Q 是具体定位区的长度,在海区存在N 个船只通信传感节点,通信海区半径用r 表示,在实施船只定位时,其通信节点发出的信号受到绕射、障碍物阻挡等因素影响,船舶通信节点信号传播具备各向异特征[9],所以本研究使用对数正态传播模型计算船舶通信节点信号功率大小。d0,d 是船只通信的上传节点和获取节点的估计距离和真实距离,船舶移动互联网络接收节点信号功率,计算公式为
式中:n 是通信信号上传通道衰减系数;pr是接收节点信号传输功率;pt是发出信号功率;Ω(d0)是无线模块传输模型;Nσ是高斯随机噪声。
移动互联模块的传输天线增益用Gt表示,获取信息的天线增益用Gr表示,无线电自由空间传输模型计算公式为
式中:λ 是通信信号波长;η 是信号获取模块的衰减系数。
在定位目标海区中,设定2 个任意的网络节点,如果两节点距离是d 时,设定:
所以船只在移动互联区内基点和获取传输信号的大小能够通过正态传输表示,计算公式为
式中:令κ=pr(d0)+Nσ,则式(4)可表达为
将式(5)代入式(4)得出10nlgd=κ-pr(d)。
3.1 海上距离估算实施
由于多船舶通信节点在移动互联网区域内为均匀随机分布状态,且每个多船舶通信节点的通信半径均相同,其作用范围为规则的圆,依据接收信号强度和节点距离之间的近似特征[10],则最小接收信号强度与对应最大节点距离的关系计算公式为
式中:pmin、dmax是最小接收传输速率及节点的最远距离。
信号在传输时的衰减系数的计算公式为
将式(6)、式(7)代入式(5),多舰船通信节点距离的估算公式为
通过上式获取船只在移动网络区内,所有通信节点的距离大小。
3.2 通信节点距离误差补偿
由于移动互联网络内通信信号内存在干扰噪声以及信号传输的衰减性,导致计算相邻船舶通信节点距离存在一定误差,为提升多船舶通信目标定位精度,需对相邻船舶通信节点距离误差进行补偿处理,其详细过程如下:d 表示2 个多船舶通信节点距离,该距离与距离误差之间的计算公式为
式中:φ(d)是两船之间的距离误差;ε、ξ 是一次误差系数和常误差系数。误差系数函数的计算公式为
式中:I(ε,ξ)是误差系数函数;di是真实数据;φ(di)是真实距离和估计距离的差量。
将式(10)误差系数求导,计算公式为
将式(11)求解后,获取一次误差系数和常误差系数数值,计算公式为
式中,邻船舶通信节点距离误差补偿后的修正数的计算公式为
3.3 海上目标定位实施
海上多目标移动时,在本研究移动网络区中,目标在移动互联网络内的移动信标会随着船舶的航行向网络内不断发送位置信息包,此时未知的多船舶通信目标节点可依据概率推算其位于某个信标节点周围,从而实现多船舶通信目标的定位。以补偿后的相邻船舶通信节点距离为基础。xi、yi是误差补偿后的船只通信节点的坐标,多船只的节点位置限制公式为
想要实现多船只通信目标定位更加准确,设置其连通性通信节点位置约束方程,计算公式为
如果某个船的通信节点被获取,则其连通性通信节点位置约束方程计算公式为
式中:xa、ya是通信区的坐标;s 是通信半径。
依据上述过程更新多船舶通信目标通信节点区域后,获取多船舶通信目标未知点的定位信息的计算公式为
式中:O(x,y)是该通信区内通信目标未知点的位置,x,y∈ui;FRSSI(·)是不确定节点和确定节点距离似然概率函数。
3.4 定位数据检测评判标准
海上船只定位检测测试中,通信传输信号识别准确度的判断指标计算公式为
式中:TP、TN 是准确识别的传输信号和无传输信号;FP、FN 是错误判断的传输放电和无传输信号。LQ越大表示判断的正确度越高。
4 试验流程与结果
在试验过程中,通过测量发送接收传感终端电压和电流的测量,可以推算出本系统的稳定性,实时推算的数据如图5 所示。
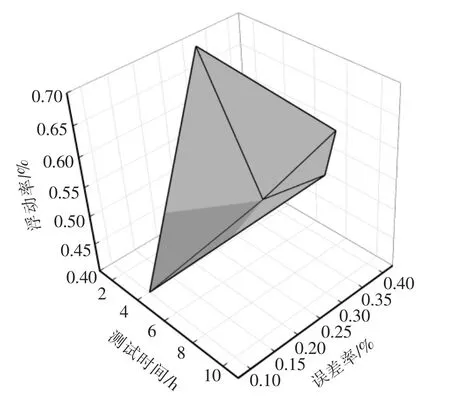
图5 系统稳定度示意图Fig.5 System stability diagram
图5 中,本研究系统在工作中的误差率和浮动率都较低,表明本系统拥有稳定和高效率的特点,在运行中可以有效地面对诸多挑战。
本研究以某港口的出入航线作为实验对象,使用本研究系统对出入港航线内多船舶通信目标进行定位,其中多船舶均加入移动互联网,多船舶的信标信息发送间隔为0.1~1.0 s,其通信半径区间为10~30 m,信标节点移动速度10~50 s。使用本文方法对其距离估算值误差进行补偿处理,补偿后误差值不得高于0.5 m,实验数据如表2 所示。
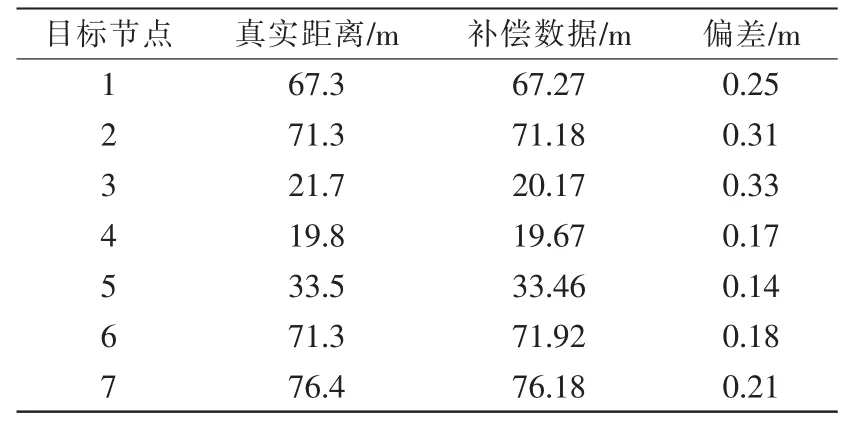
表2 实验数据Tab.2 Experimental data
由表2 可知,本文方法对估算的多船舶通信节点距离进行补偿后,其估算多船舶通信节点距离偏差最小是0.14 m,最大仅为0.33 m,该数值较所设的阈值低,说明本文方法可有效对多船舶通信节点距离进行补偿,补偿后的多船舶通信节点距离与其实际距离误差较小。
将10 艘船加入移动互联通信网络的北斗定位模块,在相同实验环境内进行定位试验,实验类型和相关数据如图6 所示。

图6 实验统计数据Fig.6 Experimental statistical data
由图6 可知,本文方法在定位船舶通信目标时的定位位置与船舶通信目标位置完全吻合,说明本文方法受船舶数量影响较少,具备较强的多船舶通信目标定位方法。检测某一移动通信网络区内某船只的实验显示页面参数如表3 所示。

表3 测试定位实验数据Tab.3 Test and positioning experimental data
由表3 可知,本系统能够将放电区的详细参数以及地理信息全部显示,表明本系统在应用中,能够在减少检测周期,提高检测效率。北斗系统运行实验数据如表4 所示。
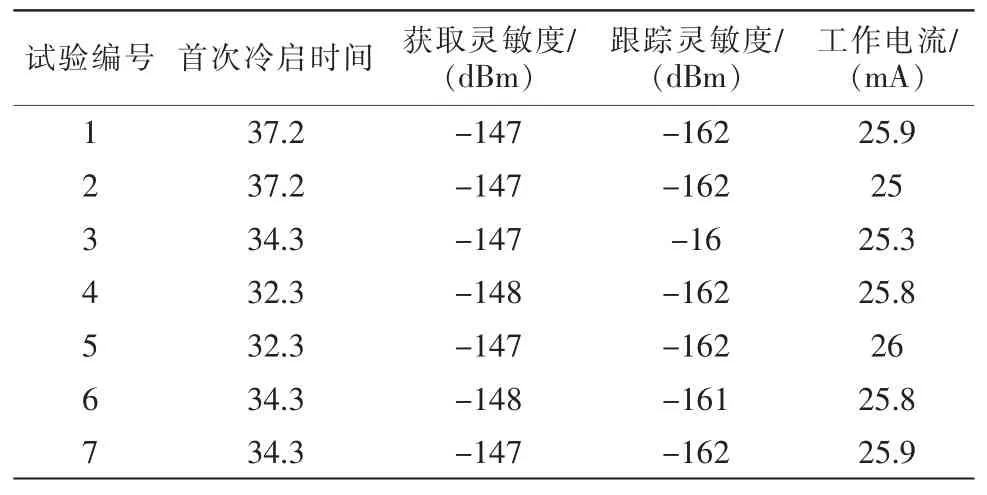
表4 北斗系统测试数据Tab.4 BDS test data
由表4 可以看出,在该北斗系统数据测试中,通过多次试验将系统的稳定数据记录,确保定位业务的正常实施和整个系统的稳定。实验误差数据如图7 所示。

图7 实验数据Fig.7 Experimental data
由图7 可知,本研究方法的误差率不超过1%,且在实验6 h 后基本稳定在0.5%以下。
5 结语
本研究设计了一个北斗定位技术的海上安全与通信系统。利用BDS 技术将海上船只进行定位,确认船只安全位置,保证航线和距离的正确度;并进一步使用了MI 技术,通过计算船只通信节点距离和误差距离的关系特征,对其求导后得到距离误差补偿量,对多船舶通信节点距离误差实施补偿。使用基于单移动信标的多船舶通信目标定位方法实现多船舶通信目标的实时定位。但本研究系统存在各个环节功能不稳定,需要人工监控来防止出现系统不稳定情况,这也是后续本系统需要加强和改进的方向。
猜你喜欢
军事文摘(2023年20期)2023-10-31
防爆电机(2022年4期)2022-08-17
小哥白尼(神奇星球)(2022年3期)2022-06-06
牡丹(2021年11期)2021-07-20
中国眼镜科技杂志(2019年9期)2019-11-11
当代陕西(2019年18期)2019-10-17
太空探索(2016年3期)2016-07-12
舰船科学技术(2015年8期)2015-02-27
城市道桥与防洪(2014年5期)2014-02-27
中国工程咨询(2014年3期)2014-02-16
