
输电线路螺栓检测的激光点云数据自动化配准研究
2024-01-27 02:59黄绪勇林中爱滕启韬
自动化与仪表 2024年1期
黄绪勇,林中爱,唐 标,滕启韬
(云南电网有限责任公司电力科学研究院,昆明 650012)
输电线路螺栓的巡检多采用无人机或激光扫描的方式,通过激光雷达采集现场数据并传输至云数据平台中进行对比分析。为了提高激光扫描的精准性,并改善视场角的限制,需要对激光点云数据进行自动化配准,将采集到的前后帧不同点云数据转换到同一坐标下,并将重合部分连接在一起。将其应用在输电线路螺栓的检测中,可通过点云数据自动化配准来获取精准的姿态信息,帮助实现故障点的高效定位,提高自动化检测效率和精准度。
文献[1]建立数据采集模型,并提取了电力线路中具有稳定结构的目标特征点,采用双向最邻近距离比函数对其中点云数据进行初始配准,设定距离最精准阈值以该值作为配准参照。该方法鲁棒性较强,但在配准前未对数据进行去噪处理,导致配准误差较大;文献[2]则采用一种基于关键特征加密的点云数据配准方法。采集被测位置点周围相邻站点的点云数据信息,计算点云数据集中符合正态分布的数据点属性参数,根据特征信息距离来完成自动化配准。该方法对每个数据均进行特征所需运算量较大,实际应用性能较差。
因此,本文研究一种输电线路螺栓检测的激光点云数据自动化配准研究。通过自动化的激光点云数据配准,能够精确地对输电线路螺栓进行匹配和定位,实现对整个输电线路螺栓的快速全覆盖扫描。从而提高了检测的精度和一致性。
1 激光点云数据分类
1.1 均匀化抽稀
由于输电线路螺栓各区域的特征不同,不同激光强度、角度位置扫描以及扫描速度得到的特征信息也存在一定差异,造成点云密度分布不均匀。为提高激光点云数据采集的细节完整性和真实性,在采集时自动选择密度较大的数据,尽可能降低数据之间的密度混淆,因此,通过建立三维空间[3-4],对原始输电线路激光点云数据进行抽稀化处理。具体操作步骤为
(2)设定空间大小为(dx,dy,dz),其中dx、dy、dz表示3 个空间方向距离[5],将点云数据分为多个相同大小的矩形框。为了保证抽稀化处理精准度,将空间格网大小设定为dz<5 cm,在第i 位置的格网约束范围如下:
式中:Xi、Yi、Zi分别表示在第i 个位置的点云采集数据三方向的稀疏信息[6]。根据上述公式将所有激光点云数据按照所对应的空间位置分配到各个格网中;
(3)在每个格网中选择一个中心点作为保留点,对该保留点外的数据进行抽稀处理;
(4)将每个网格中保留点进行保存,清空其余数据,这样即可完成激光点云数据的均匀化抽稀处理。
经过抽稀处理后的数据密度分布较为平衡,点云数据均匀散落在空间中,提高后续的自动化配准的精准度和效率。
1.2 激光点云数据去噪
对激光点云数据进行抽稀处理后,由于输电线路环境中存在天气、自然以及长期损耗等多种因素影响,导致抽稀处理后激光点云数据噪声含量过高,在螺栓检测时会影响干扰检测结果,同时还会导致点云数据自动化配准出现误差。因此,采用双边滤波算法对经过抽稀处理后的点云数据进行去噪处理,修正激光点云数据的双边噪点,在保留原始特征的同时对激光点云数据进行去噪处理,为提高后续数据自动化配准效率做好准备。
在δ 中选取任意目标点pi、pj,设相邻点集合为N(pi,pj),目标点pi、pj的标准参数为g¯ij,在保证整体数据方向一致的前提下,定义双边滤波权重因子β[7],表达式为
2)任务驱动教学法。任务驱动教学法是一种先进的教学方法,以理论功底扎实为前提,结合学生的学习活动及任务,以探索问题为契机,引导学生的学习兴趣,模拟真实的教学环境,让学生带着真实的任务去学习,掌握学习的主动权。将任务驱动教学法引入机器人学课程教学,与教学内容更加契合。将整个班级分成几个小组,每个小组内部根据具体的任务来分工,教师现场宏观指导,帮助学生明确方向,选择适合自己的研究课题,具体设计研究过程由小组内部独立完成。小组内学生通过观察教师演示并初步分析程序后,进行讨论和尝试,亲自动手进行操作,发现问题、解决问题,既能培养独立思考的能力,也能体现出自己的真正价值[6]。
式中:ωc表示双边滤波[8]空间域的高斯核函数,可用于调节滤波范围;ωs表示双边滤波频率域的高斯核函数,可用于控制点云数据特征的保留程度。
更新ωc和ωs,则有基于双边滤波空间域的高斯核函数ωc计算公式为
基于双边滤波频率域的高斯核函数ωs计算公式为
由此,更新后的滤波权重因子β 的计算公式为
得到的最终双边滤波结果即为激光点云数据的去噪结果,其表达式为
1.3 激光点云数据分类
去噪后的激光点云数据中的类别繁多且复杂,无法精准地从全部输电线路点云数据找到螺栓数据。同时,因螺栓点云数据与其他类别数据因拓扑关系较为相近导致后续自动化配准混淆,降低配准概率。因此,基于螺栓点云数据的特征属性值,采用k-means 聚类算法分类去噪后的全部激光点云数据。
将去噪后的全部激光点云数据p′分为k 个类别,则有k=1,2,…,i,…,k 个初始的聚类中心。每个类别之间的特征都具有极高的相似度,表达式为
式中:mi表示k 中的某一个类别。
对于每个点,在所有的聚类中心中找到距离最近的一个,并将其分配到该聚类中心所代表的类别。
根据当前所有分配给某个聚类中心的点,通过d(p′)的平均值,可以得到新的聚类中心:
重复式(8)和式(9),直到聚类中心不再改变,得到最终的聚类中心和相应的分类结果,将激光点云数据分成不同的类别,从中得到螺栓点云数据中心,实现数据分类。激光点云数据分类流程如图1所示。

图1 激光点云数据分类流程Fig.1 Laser point cloud data classification flow chart
根据图1 所示的激光点云数据分类流程,完成激光点云数据的抽稀化处理、滤波去噪以及分类,使激光点云数据内的各个特征清晰化,便于进行输电线路螺栓激光点云数据的自动化配准。
2 激光点云数据自动化配准算法
由于对点云数据进行了抽稀化处理、滤波去噪以及分类多次处理,使点云数据之间的配准产生微小偏移。因此,为实现输电线路螺栓检测,通过自动化配准使其在同一坐标系下对齐。在激光点云数据自动化配准时,由于螺栓处于三维空间中,激光扫描得到的数据在角度方向上的误差较大,所以,将自动化配准转换为角度配准问题。具体配准过程如下所示:
以螺栓点云数据中心k′为基础,建立空间坐标系,在三维坐标系中对螺栓点云数据的坐标点进行自动化配准。设空间坐标为(Xk′,Yk′,Zk′),直角坐标系为(o-xk′,yk′,zk′),其中,o 为原点,得到空间坐标系(Xk′,Yk′,Zk′)与直角坐标系(o-xk′,yk′,zk′)之间的映射关系为
式中:R(A,B,C)表示空间中3 个最大旋转角,分别对应绕xk′、yk′、zk′轴转动;t 表示周期参数;ξ 表示尺度因子;X0、Y0、Z0为三方向上的平移参数。则自动化配准点与螺栓检测点在余弦角9 个方向上的线性关系为
式中:aij表示旋转矩阵在9 个方向上的线性系数。由此,自动化配准结果为
式中:H 表示高度上的配准误差;L 表示横向距离上的配准误差;V 表示误差约束。
3 实验与分析
3.1 实验设置
为验证文中提出输电线路螺栓检测的激光点云数据自动化配准方法的实际应用性能,以激光雷达无人机作为实验设备进行输电线路螺栓及现场参数扫描设备,在其周围放置多个无线传感器,并将传感器与无人机进行信号连接,可第一时间得到无人机的采集图像和数据。扫描到的螺栓结果如图2所示,实验涉及到的激光扫描数据信息如表1 所示。

表1 激光扫描数据信息Tab.1 Laser scanning data information

图2 输电线路螺栓激光点云数据自动化配准结果Fig.2 Automated registration results of laser point cloud data for transmission line bolts
3.2 实验分析
给出所提方法对输电线路螺栓激光点云数据自动化配准结果,以红外点云图像形式进行展现,实验结果如图3 所示。

图3 输电线路螺栓激光点云数据自动化配准结果Fig.3 Automated registration results of laser point cloud data for transmission line bolts
图3(a)中的黑色的红外线段为多个配准点之间的连线,线段两侧的黑色点代表目标配准点。分析图3(b)可知,所提方法针对输电线路螺栓激光点云数据自动化配准结果表现较好,各点配准精准度较高,通过水平方向的配准结果来看,所有点几乎全方位覆盖,基于不同高度和不同距离以及不同方向上的配准准确性都较强。结果表明,所提方法可以实现高效且精准的激光点云数据自动化配准,应用在实际中可提升输电线线路螺栓检测效率,确保点云数据配准精度。
为了进一步检验所提方法对输电线路螺栓点云数据自动化配准结果的有效性,以手动配准数据为参照,对所提方法进行定量性评价,即以RMSE(root mean squared error)均方根误差指标为验证指标,通过指标大小进行分析。并基于双向最近邻距离比的点云数据配准方法、关键特征加密的点云配准方法数据配准方法作对比,RMSE 计算公式为
式中:N 表示数据量;Tg表示源点云数据的真值转换参数值;Tc表示源点云数据的估计转换参数值;RMSE 表示越小,2个点云数值之间的接近程度。通过式(13)可知,RMSE数值越高代表2 个点云之间接近程度越高。得到实验结果如图4 所示。
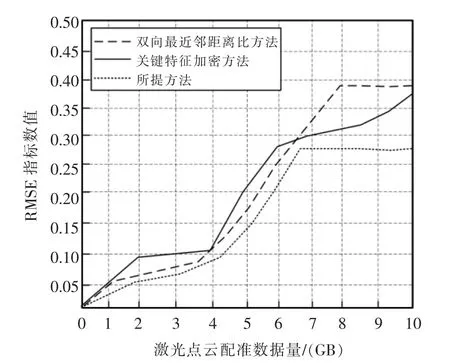
图4 三种方法RMSE 曲线对比Fig.4 Comparison of RMSE curves for three methods
分析图4 可知,3 种方法的RMSE 指标数值随着数据量的增加逐渐下降,所提方法的RMSE 指标数值最大值为0.3;双向最近邻距离比方法和关键特征加密方法的RMSE 指标数值高于所提方法,均大于0.3。结果表明,经过所提方法的自动化配准精准度较高,源点和配准点之间接近程度较高,提高了输电线路螺栓检测性能,验证了所提方法自动化配准的实用性能。
4 结语
本文提出了一种输电线路螺栓检测的激光点云数据自动化配准研究。实验结果表明,所提方法可以有效实现激光点云数据自动化配准,各点配准精准度较高,基于不同高度和不同距离以及不同方向上的配准准确性较强。同时,经过所提方法自动化配准,源点和配准点之间接近程度较高,有效提高了配准精度。
猜你喜欢
初中生学习指导·提升版(2023年12期)2023-12-18
传感器世界(2023年5期)2023-08-03
中国特种设备安全(2022年5期)2022-08-26
四川建筑(2020年1期)2020-07-21
当代陕西(2020年24期)2020-02-01
减速顶与调速技术(2018年1期)2018-11-13
自然资源情报(2017年4期)2017-11-26
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27
