
海上风机无人机巡检螺旋桨振力异常监测研究
2024-01-27 02:59刘艳贵傅望安王海明曾崇济
自动化与仪表 2024年1期
刘艳贵,傅望安,王海明,曾崇济
(1.华能(浙江)能源开发有限公司清洁能源分公司,杭州 310014;2.中国华能集团清洁能源技术研究院有限公司,北京 102209)
由于风能具有可再生特性,为履行低碳方针,其成为热点能源被广泛应用在各个领域。由于受海上环境影响,风机结构需要承受海风、潮汐、海生物附着、材料老化等多种影响因素,这些因素都会导致海上风机基础结构的失效,因此需要对其定期巡检[1]。利用无人机巡检螺旋桨[2]实现对海上风机的巡检能够进一步确保风机的安全运行,螺旋桨是无人机的重要组成部分,其发生故障将严重影响海上风机的巡检效果,因此在对海上风机巡检时,监测无人机螺旋桨振力异常具有十分重要的意义。
在国内相关专家给出的一些研究方法的基础上[3-5],本文提出一种海上风机无人机巡检螺旋桨振力异常监测方法。通过实验分析证明,所提方法可以有效提升监测结果的准确性,减少监测耗时。
1 螺旋桨振力异常监测
1.1 异常特征提取
为了实现对异常信号的自动识别和判断,在实现无人机螺旋桨振力异常监测前,需要提取异常特征,以此建立无人机巡检数据的基础,为异常信号的识别和判断提供依据。EEMD 分解[6-7]被广泛应用于不同的研究领域内,并且取得了比较显著的研究成果,因此本研究通过EEMD 分解对巡检海上风机的无人机螺旋桨振力展开分解处理[8-9]:
(1)为使无人机螺旋桨振力信号符合实际情况,在原始信号x(t)中添加高斯白噪声si(t),进而组成全新的信号xi(t),其表达式为
(2)将加入噪声后的信号组[x1(t),x2(t),…,xn(t)]中的各个信号xi(t)展开EEMD 分解处理,从而提取IMF 分量,并经过多次重复操作,获取多组IMF 分量。
(3)计算全部IMFi组合的平均值,确定各组IMF分量Mj(t),对应的计算式为
式中:n 代表常数。
将经过EEMD 分解处理后的IMF 分量展开自相关分析,进而获取自相关函数Si(τ),计算式为
式中:T 代表周期;τ 代表延迟时间。
通过EEMD 分解提取到多个IMF 分量,但是每个分量的频谱特征不明显,难以准确提取异常特征。而稀疏快速傅里叶变换可以将每个IMF 分量的频谱特征更加明显地展现出来,从而更容易提取异常特征。因此,将提取具有周期特征的IMF 分量展开稀疏快速傅里叶变换,详细的操作步骤如下所示:
(1)将IMF 分量初始化处理,设定无人机螺旋桨振力信号的长度l、稀疏度p 和窗口函数f 的参数,经过定位计算获取计算总次数Z:
(2)经过Z 次傅里叶系数定位计算,以此获取相应运算结果Zr。
(3)获得Zr并以此计算其通过Z 次计算后的次数。
(4)将总次数大于Z/2 的频率成分保留下来,构建全新的集合
(6)基于以上计算,获取频率与幅值,并将其设置为傅里叶系数hop[10],获取异常特征提取结果为
式中:β 代表时域信号序列;y 代表执行子采样。
1.2 监测方法
为实现无人机巡检螺旋桨振力异常监测,通常需要利用传感器,而单一传感器采集的数据可能存在一定的误差和不足,多传感器信息决策融合可以有效提高异常检测的准确性和可靠性,可以综合利用各种信息识别和判定各种异常情况。因此,基于以上获取的无人机巡检螺旋桨振力异常特征,引入多传感器信息决策融合网络结构,对应的结构示意图如图1 所示。

图1 多传感器信息决策融合网络结构图Fig.1 Structure of multi-sensor information decision fusion network
分析图1 可知,整个网络的组成可划分为3 个部分:
(1)数据输入层:对采集到的无人机巡检螺旋桨振力全部信号展开预处理,并且提取不同传感器对应的多维特征,将其作为网络的输入。
(2)子决策层:以传感器类型为依据,将提取到的无人机巡检螺旋桨振力异常特征划分多维特征向量,即为多个独立的样本,并通过多层感知机(MLP)对全部样本特征展开融合处理,进而实现无人机巡检螺旋桨振力异常回归映射。
(3)综合决策层:对各个传感器特征监测获取螺旋桨振力异常,再次通过MLP 展开融合处理,最终实现螺旋桨振力异常监测。
经过子决策层划分处理后,为了避免样本特征不统一等问题的出现,因此需要统一化处理向量,并将其作为多传感器信息决策融合网络的数据输入,经过标准化处理的无人机巡检螺旋桨振力异常特征H 表达式为
式中:ψ 为无人机巡检螺旋桨振力异常特征的平均值;∂1为特征数据方差值。
由于神经网络具有强大的学习和适应能力,可以自动提取特征和分类判别。因此,在引入多传感器信息决策融合网络结构的基础上,利用三层神经网络对其展开融合和综合决策。输入层可以接收多传感器信息,隐含层可以自动提取特征,输出层可以异常检测和判定,并输出异常情况的识别结果。计算多层神经网络各个层间的映射关系,即隐含层和输出层的输出向量ak与ej:
式中:uik为输入层和隐含层之间的权重系数;bik为输入层和输出层之间的偏置;cik为输入层和隐含层之间的偏置。
为了确保无人机巡检螺旋桨振力异常监测结果的准确性,需要对网络不同层的参数展开优化调整。引入折交叉验证法判断不同组合参数额度性能,选取最优参数。折交叉验证示意图如图2 所示。

图2 折交叉验证示意图Fig.2 Schematic diagram of folding cross verification
在完成上述操作后,为了优化神经网络的性能,还需要对网络展开进一步的学习训练。通过更新网络权重系数u 和偏置b,可以使网络更好地适应训练数据,提高其泛化能力,从而提高螺旋桨振力异常监测的准确性和可靠性。其计算式如下:
基于以上计算,将获取的无人机巡检螺旋桨振力特征,根据相同比例设置将其分为学习样本与对照样本,以此获取损失函数P(mse),其数值越小,说明网络训练的鲁棒性越好,其表达式如下:
式中:m 为样本总数;xs和为无人机巡检螺旋桨振力的实际值和预测值。
通过多次迭代训练,需要不断对偏置和权重系数展开更新处理,将损失函数的数值降至最低,实现网络训练。基于此,对无人机巡检螺旋桨振力展开回归预测,将得到的预测结果展开加权综合决策处理,进而实现无人机巡检螺旋桨振力异常监测,其异常监测结果∂(x,y,z)表示为
2 实验分析
为了验证所提海上风机无人机巡检螺旋桨振力异常监测方法的有效性,实验选取长度为53 cm、螺距为7 mm、叶片扭曲角度为5°的无人机巡检螺旋桨展开实验,如图3 所示。将获取到的振力异常信号通过Rigol DS1054Z 型号的示波器显示,示波器信号输出现场图如图4 所示。

图3 无人机巡检螺旋桨Fig.3 UAV inspects propeller

图4 示波器现场图Fig.4 Field diagram of oscilloscope
实际的无人机巡检螺旋桨振力异常波形如图5所示。

图5 无人机巡检螺旋桨振力异常波形图Fig.5 Abnormal vibration force waveform of UAV inspection propeller
实验通过所提方法提取无人机巡检螺旋桨振力异常信号,测试结果如图6 所示。
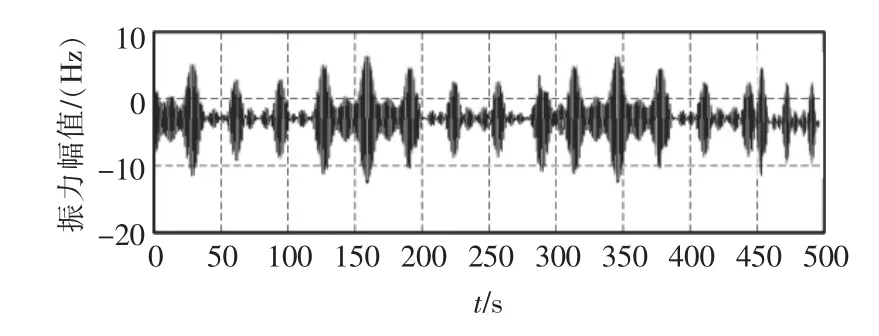
图6 研究方法的异常提取结果Fig.6 Anomaly extraction results of research method
分析图6 可知,通过与实际无人机巡检螺旋桨振力异常波形图对比,所提方法的异常提取结果与实际异常结果具有一致性,说明所提方法可以精准提取无人机巡检螺旋桨振力异常特征。
为了证明所提方法具有高效性,选取500 个测试样本,设置10 组实验,以时间为评价指标,测试结果如表1 所示。

表1 异常监测用时结果Tab.1 Abnormal monitoring time results
分析表1 可知,本文方法在测试500 个样本数量平均耗时仅为5.60 s,监测效率高,进一步验证了方法的优越性。
为验证所提方法的监测性能,选取异常状态下的漏报率FAR 和正常状态下的误报率MDR 作为测试指标,对应的计算式为
式中:N(N,F)为测试样本集中正常数据被判定为异常数据点的个数;N(N)和N(F)分别为正常和异常样本总数;N(M)为测试集中异常数据被判定为正常数据的个数。
实验选取500 个测试样本,基于以上计算式,测试研究方法的实验结果如图7 所示。

图7 研究方法的异常监测性能Fig.7 Anomaly monitoring performance of research method
分析图7 可知,所提算法的漏报率与误报率较低,当测试样本为500 个时,其漏报率仅为1.1%,误报率仅为0.8%,说明所提方法可以获取精准的无人机巡检螺旋桨振力异常监测结果。
3 结语
为了有效改善传统方法存在的不足,提出一种海上风机无人机巡检螺旋桨振力异常监测方法。通过大量实验分析证明,采用所提方法可以准确提取无人机巡检螺旋桨振力异常特征,获得异常检测效果更为准确,且效率更高。在未来研究过程中,可以尝试引入其他优化方法,使其各方面的性能得到进一步优化。
猜你喜欢
中学生数理化·高一版(2021年2期)2021-03-19
航空发动机(2020年3期)2020-07-24
知识经济·中国直销(2018年8期)2018-08-23
能源(2018年5期)2018-06-15
能源(2017年9期)2017-10-18
兰台世界(2017年10期)2017-06-01
数学学习与研究(2017年3期)2017-03-09
现代工业经济和信息化(2016年12期)2016-05-17
中国老区建设(2016年1期)2016-02-28
安徽冶金科技职业学院学报(2015年3期)2015-12-02
