
基于PID 控制技术的电力系统运行自动化控制系统
2024-01-27 02:58王馨悦马星河
自动化与仪表 2024年1期
王馨悦,马星河
(河南理工大学 电气工程与自动化学院,焦作 454003)
电力系统的不断发展及用电需求持续增加,对于电力系统运行的稳定性需求也逐渐增加,因此,实现电力系统的智能化、自动化[1]尤为重要。电力系统运行自动化控制指的是将自动控制技术应用于整个电力系统中[2-3],以此提升电力系统的自动化水平[4-5],保证电力系统的稳定运行。但是由于当先电力系统结构复杂,导致控制效果仍旧存在一定局限性[6],整体控制效果不理想。因此,文献[7]采用两层控制结构,进行电网的分层控制,但是该方法无法满足整体电力系统的控制需求;文献[8]构建基于信息熵的耦合控制模型,完成电力系统在多种扰动下的稳定控制,如果电力系统在故障运行状态下,则该方法的控制可靠性不足。
PID 控制技术也称为比例积分微分控制,其是依据给定结果和实际输出结果组成控制偏差[9],并按照比例、积分、微分的线性组合形成控制量,以此完成目标控制[10-11]。因此,本文为实现电力系统运行自动化控制,利用PID 控制技术的自动化优势,设计基于PID 控制技术的电力系统运行自动化控制系统。
1 电力系统运行自动化控制系统
1.1 系统架构
为实现电力系统运行自动化控制,本文结合PID控制技术,设计基于PID 控制技术的电力系统运行自动化控制系统,本系统的整体结构如图1 所示。

图1 基于PID 控制技术的电力系统运行自动化控制系统Fig.1 Power system operation automation control system based on PID control technology
本系统整体分为3 层,分别是基础层、数据层以及控制层。基础层主要是通过电力系统运行状态数据,通过通信管理机完成该数据传输,将其传送至数据层中;数据层完成数据的接收和存储,在该过程中采用数字签名机制完成数据处理,以此保证数据的有效调用;控制层则依据电力系统的控制需求,调用数据层中存储的相关数据,并通过PID 控制技术实现电力系统自动化控制。
1.2 现场控制器硬件结构
现场控制器是依据控制层的控制指令和控制方案,进行电力系统现场控制指令的执行,并且该控制器在控制层没有下达控制整体控制指令前[12],可自主依据采集的电力系统运行数据进行区域的电力系统运行控制。现场控制器整体结构如图2 所示。现场控制器整体结构包含采集电路、串口、并口、串口仪器、并口仪器、控制接口、虚拟仪器软件、计算机、计算机接口以及应用程序等部分。控制层下达电力系统整体协调控制指令和控制方案[13-14]。

图2 现场控制器整体结构Fig.2 Overall structure of onsite controller
1.3 数据层结构设计
1.3.1 数据分层传输结构
数据层是系统实现电力系统自动化控制的核心支撑,其可为自动化控制的实现提供可靠的电力系统运行数据,数据层能接收基础层传送的数据,同时支持控制层的数据调度,其在数据传输过程中,为保证数据的可靠性和安全性,采用分层传输管理模式完成数据传输,其结构如图3 所示。

图3 数据传输结构Fig.3 Data transmission structure
1.3.2 数据管理方法
数据层在进行数据管理过程中,数据管理服务器为保证数据调度过程中的稳定性,引入数字签名机制。该机制可为电力系统自动化控制提供数据传输所需的信息保障协议,同时能够依据应用需求,将信息存储于数据库中。如果G1和G2表示不同类别的电力系统运行数据,则电力系统数据调度的数字签名机制公式为
式中:W 表示数据编码转换条件;f 表示数据调度传输特征值参量;l 表示数据调用系数;χ 表示电力系统数据一体化作用系数。
1.4 基于PID 的自动化控制方法
1.4.1 控制器结构
本文对PID 控制方法进行优化,采用模糊理论对电力系统的非线性运行变化特点进行建模,精准描述电力系统运行的不确定性以及模糊性,并结合PD 控制器形成模糊级联PID 控制器,控制层则依据该控制器完成电力系统运行自动化控制。模糊级联PID 控制器结构如图4 所示。

图4 模糊级联PID 控制器结构Fig.4 Fuzzy cascade PID controller structure
模糊级联PID 控制器在控制过程中主要包含两个部分,一是外环控制,二是内环控制,两部分详情如下所述:
(1)外环控制:外环控制也称为电网主回路控制,该控制主要是依据PD 控制器完成,该控制器在进行外环控制时,输入参数为局部电网的控制误差,其用ε(t)表示。
(2)内环控制:该控制也称为辅助回路控制,其主要采用模糊PID 控制器完成,该控制器以外环控制的输出结果为输入,输出反馈信号。
1.4.2 电力系统运行自动化控制方法
如果电力系统的实际输出结果用y(t)表示,设定结果用r(t)表示,两者之间的误差计算公式为
依据比例、积分和微分线形关系,完成ε(t)的组合处理,以此形成PID 控制器的控制量,用u(t)表示,则PID 控制器输入和输出之间的关联为
式中:Kp表示比例系数;Ki表示积分时间常数;Kd表示微分时间常数。
传递函数用f(s)表示,其计算公式为
式中:s 表示电力系统的变化量。
本文为保证更佳的电力系统自动化控制效果,引入自适应伸缩因子ηi,以此保证电力系统在非线性情况下的自动化控制效果,ηi的计算公式为
式中:ξ 表示极小正数;sc(t)和s(t)均表示输入变量;两者的初始模糊论域边界用E1和E2表示。
由于Kp、Ki和Kd对于PID 控制器的控制效果存在直接影响,因此,为保证电力系统自动化控制效果,依据误差ε(t)的计算结果,通过模糊理论完成Kp、Ki和Kd的优化控制,优化后三者的计算公式分别为
式中:φu和γu分别表示临界增益和周期;ψm表示调整系数;Am表示调整幅度。
依据上述公式获取的优化后参数,实现电力系统运行自动化控制,并向基础层下达协调控制指令以及结构现场控制结果。
2 测试结果与分析
为验证本文系统对于电力系统运行自动化控制的应用效果,文中以某地区接入2 个光伏电站和风机的360 V 电力系统为实验对象,接入的光伏电站功率均为200 kW,风机功率均为100 kW。
采用RPS 系数作为评价指标,其值越大表示本文系统的数据调度能力越佳。获取本文系统在不同的调度数据类别下,随着数据量的逐渐增加,RPS 系数的测试结果,如表1 所示。对表1 测试结果进行分析后得出:在不同的调度数据类别下,随着数据量的逐渐增加,RPS 系数结果均在0.942 以上,极大程度接近1。是由于本文系统在应用过程中,数据层分层传输管理模式完成数据传输,并利用数字签名机制完成数据调度。

表1 数据的调度能力测试结果Tab.1 Results of scheduling capability test of data
为验证本文系统对于电力系统运行自动化控制的可靠性,文中采用失效率λ(t)和修复率μ(t)作为评价指标,两个指标的计算公式为
式中:λ(t)表示系统在控制过程时,在t 时刻的失效概率;T 表示电力系统正常运行时间;P()表示条件概率函数;Δt 表示采样时间;μ(t)表示电力系统在运行过程中,故障的修复概率;TY表示故障持续时间。两个指标的结果均在0~100%之间,其值越大,表示本文系统控制的可靠性越佳。
依据上述公式获取电力系统在故障运行时,随着故障比例的不断增加,通过本文系统对其进行控制,获取控制后λ(t)和μ(t)指标的结果,如表2 所示。对表2 测试结果进行分析后得出:在不同的故障比例下,采用本文系统对其进行自动化控制后,λ(t)和μ(t)的结果均在92.7%以上;是由于本文系统在应用过程中,结合现场控制器和模糊级联PID 控制器完成控制,因此,控制效果较好,可更好地保证电力系统的稳定运行。

表2 电力系统运行自动化控制的可靠性测试结果Tab.2 Reliability test results of automatic control of power system operation
为进一步验证本文系统对于电力系统运行自动化的控制效果,文中采用绝对误差积分作为评价指标,该指标能够衡量控制误差的大小,该指标取值在0~1 之间,其值越小,表示控制误差越小,则本文系统的控制效果越佳,该指标的计算公式为
式中:xol表示电网实际调度数值;xoq表示电力系统的实际控制结果。
依据公式(11)计算本文系统在不同的负荷比例下,随着电力系统的运行线路数量的逐渐增加的结果如图5 所示。对图5 测试结果进行分析后得出:电力系统中发生不同比例负荷后,随着运行线路数量的逐渐增加,采用本文系统对其进行控制后的结果均在0.025 以下,其中的最高值为0.020。因此,本文系统控制效果较好,可在极小误差下完成电力系统运行自动化控制。

图5 电力系统运行自动化的控制误差Fig.5 Control error of power system operation automation
为验证本文系统对于电力系统运行自动化控制的应用性,采用本文系统对电力系统运行负荷进行调度控制,并将控制结果和理想结果进行对比,测试结果如图6 所示。对图6 测试结果进行分析后得出:采用本文系统进行电力系统运行自动化控制后,对电力系统中负荷的调度控制结果与理想结果几乎完全吻合。因此,本文系统具有较好的应用性,能够按照理想控制方案完成电力系统的自动化控制。

图6 电力系统负荷控制结果Fig.6 Load control results of power system
为深入验证本文系统的应用性,获取本文系统应用后,电力系统的运行电压自动化控制输出响应结果,如图7 所示。对图7 测试结果进行分析后得出:本文系统应用后,下达电力系统运行电压控制指令后,现场控制器能够依据控制指令完成电压控制;并且呈现控制响应结果,电压的控制响应结果均在360 V 左右,波动幅度较小,控制响应能力较好。
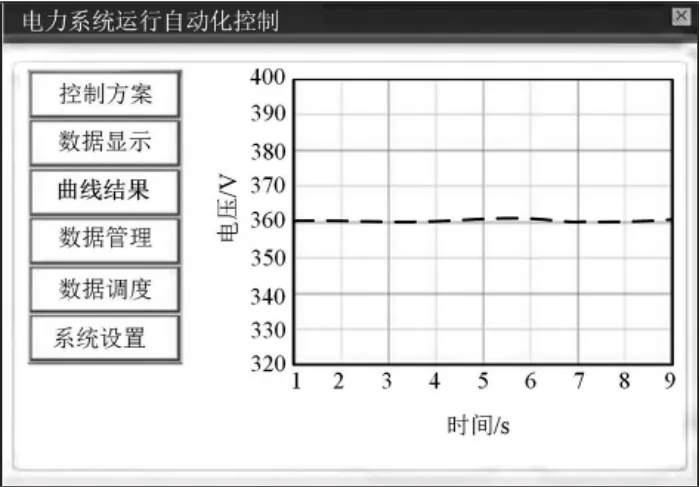
图7 电力系统自动化控制输出响应结果Fig.7 Output response results of power system automation control
3 结语
为满足电力系统智能化运行需求和用电需求,实现电力系统运行自动化控制,本文设计基于PID控制技术的电力系统运行自动化控制系统,通过该系统实现电力系统运行自动化控制,全面掌握电力系统的运行状态,并呈现电力系统的运行结果以及故障处理,保证电力系统的稳定、安全运行。
猜你喜欢
防爆电机(2022年4期)2022-08-17
装备维修技术(2021年37期)2021-11-03
中国眼镜科技杂志(2019年9期)2019-11-11
建材发展导向(2019年13期)2019-08-24
现代电子技术(2019年15期)2019-08-12
电子制作(2019年7期)2019-04-25
科技视界(2016年13期)2016-06-13
照明工程学报(2016年3期)2016-06-01
电测与仪表(2014年1期)2014-04-04
城市道桥与防洪(2014年5期)2014-02-27
