
射频隐身仿真分析和评估研究*
2024-01-24 07:37杜增
电讯技术 2024年1期
杜 增
(中国西南电子技术研究所,成都 610036)
0 引 言
现代信息化战争中,实现先敌发现、先敌识别、先敌打击是战争中取得优势的关键要素。随着军事装备的不断发展,无源探测系统对飞行器的战场生存能力构成了严重威胁[1-5],射频隐身已成为飞行器能力发展中需重点关注与持续提升的关键能力。
雷达是战机非常重要的电子装备。雷达射频低被截获能力是指在保证雷达探测战术能力的前提下对射频辐射信号特征进行缩减和控制,以降低敌方无源探测设备对其截获、分选、识别和定位的能力[6]。雷达射频低被截获能力由辐射源隐身能力和敌方电子信号探测侦察能力共同决定[7]。
雷达射频低被截获性能分析与仿真评估是研究雷达射频低被截获能力关键技术、评估雷达射频低被截获性能的重要依据和参考,专家学者们针对雷达射频隐身分析评估方面开展了多种方法研究,如文献[8-10]基于自身辐射源特征,提出了多域联合射频隐身性能分析方法和用信号截获率来表征飞机射频隐身特性方法,对飞机射频隐身设计具有参考价值;文献[11]开展了雷达采取间歇辐射的射频管控措施来有效降低测向交叉定位性能的仿真分析;文献[12]提出了机载雷达射频隐身半实物仿真系统的构建方法,对单机雷达的射频隐身性能进行了仿真分析。
上述文献主要基于雷达自身射频特征和特定使用场景开展的理论分析,部分文献针对单机的雷达辐射特征进行了仿真分析。为了使射频隐身仿真分析评估更加贴合实际情况,本文提出了一种多机协同传感器信号级联合仿真评估方法,针对飞行器雷达射频特征和雷达射频低被截获性能表征指标的计算方法,通过构建作战场景、飞行平台、射频辐射源、截获接收机模型以及低被截获性能分析评估算法模型软件,对多机协同等作战样式下的射频隐身效能进行仿真评估,同时针对运算复杂且耗时的表征参量研究其近似快速算法,以提高仿真系统的运行速度。理论分析与实测数据统计对比证明,该性能分析算法模型与仿真评估方法对于飞行器雷达射频低被截获性能分析具有很好的评估与验证作用,能为飞行器雷达射频隐身设计提供支撑依据与评估验证环境。
1 雷达射频低被截获原理
射频隐身仿真分析主要进行雷达射频目标特征参量和雷达射频低被截获参量两个方面的计算分析,如图1所示。其中,雷达射频目标特征参量用以描述飞机自身的射频信号特征,与无源探测系统无关;雷达射频低被截获参量用以描述飞机整体的低被截获性能,与无源探测系统有关[13]。
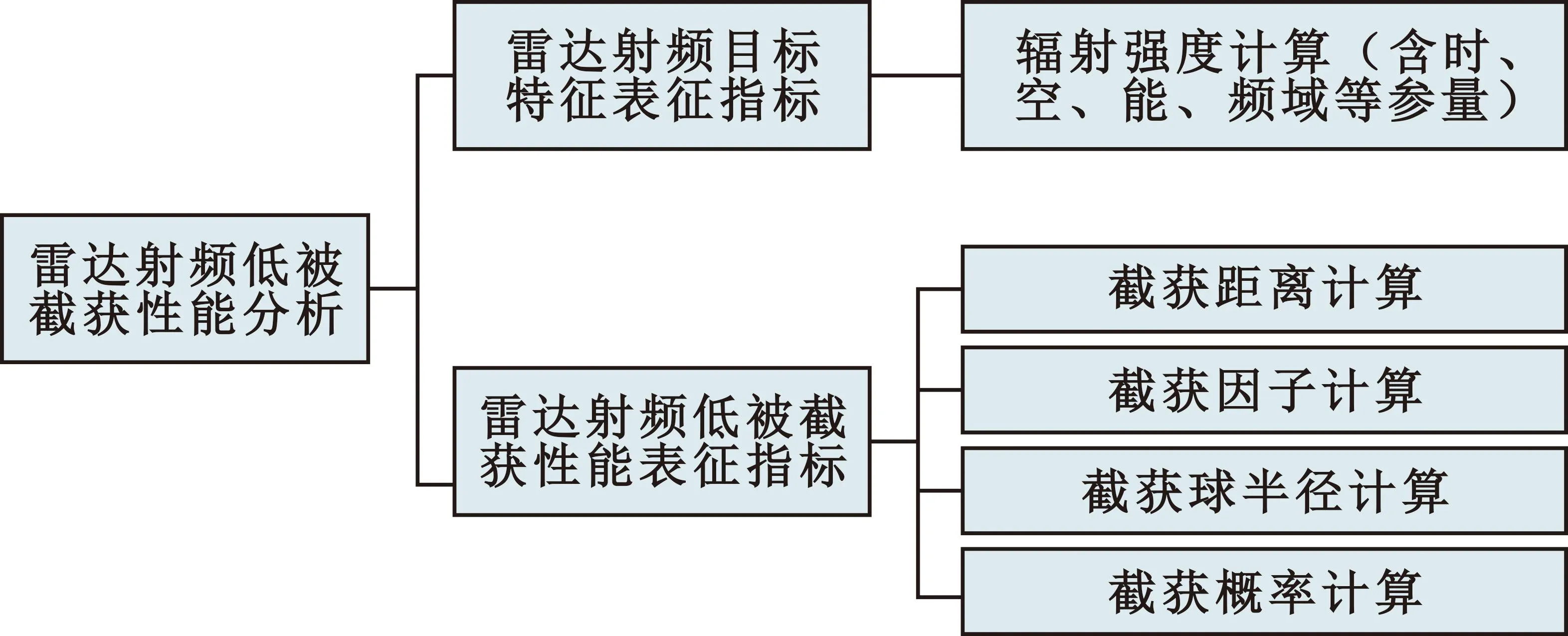
图1 雷达射频低被截获性能分析计算组成Fig.1 Composition diagram of radar RF LPI performance analysis
1.1 辐射强度计算
雷达射频目标特征表征指标是指独立于无源探测系统、飞行器本身固有的特征参量,主要采用射频辐射强度来表征。射频辐射强度的含义为单位立体角度内的辐射功率,表征了射频目标的自身特性。雷达射频辐射强度定义如下:
(1)
式中:PT为辐射峰值功率;GT为发射天线增益。式(1)与频率、空间角度、发射频度等相关,文献[7]中有详细计算过程,本文不再赘述。
1.2 截获距离计算
截获距离是指飞行器雷达被无源截获接收方截获的距离。考虑系统损耗因子,假设回波功率与门限功率相同,并且目标位于雷达发射与接收天线的主瓣方向,雷达对目标探测距离RD的计算公式如下:
(2)
式中:Pt为雷达发射功率;Gt为雷达发射天线增益(扣除雷达发射机与雷达天线间的损耗);Gr为雷达接收天线增益;σ为雷达散射截面(Radar Cross section,RCS);λ为工作波长;Pr为雷达接收机接收灵敏度(扣除雷达天线与接收机间的损耗);L2为大气双向衰减因子。
截获方接收机接收到的机载雷达的信号功率为
(3)

由式(3)可得截获距离RI为
(4)
1.3 截获因子计算
截获距离与探测距离之间的关系用截获因子来表示:
(5)
当α<1时,当前截获方截获距离小于雷达自身探测距离,说明针对该截获方,雷达信号不易被截获;当α>1时,当前截方截获距离大于雷达自身探测距离,说明针对该截获方,雷达信号易被截获;当α=1时,处于临界状态,具有一定的截获概率。
1.4 截获球半径计算
截获球半径是用来评价低截获概率发射系统的性能指标之一,定义为球体积等于截获方接收机在给定发现概率下的实际探测体积的球半径。由定义可知,
(6)
式中:Vdet为在指定发现概率下截获接收机的实际探测体积,
(7)
式中:θ表示目标方位角;φ表示目标仰角;rdet表示最大截获距离。
在处理截获距离的时候,考虑到其影响因素,如接收机类型、性能,预定的虚警概率与发现概率等,假设这些因素时探测距离达到最大来得到rdet。
自由空间损耗与探测半径关系可用下式来推导:
(8)
式中:Pr为截获方接收机要求的功率;Pt表示在既定工作频段、方位角、俯仰角下的辐射功率;Gt为截获方接收机处理增益;Lpath为自由空间路径损耗;Latmos为大气衰减。
自由空间路径损耗与截获半径关系如下:
(9)
从而可得
(10)
考虑到截获方接收机性能的G/T和Pr/N0,可得
(11)
式中:k为波尔兹曼常数;Gr/Tr表示G/T最大值;(Pr/N0)req为截获方接收机探测模型的Pr/N0的门限值(与截获方接收机的类型以及发现概率Pd有关)。
式(11)所得为在保证截获方接收机工作灵敏度以及工作在某一波长时,在某一方位角与仰角的探测距离,在计算截获球半径时应选取其最大值,即
(12)
1.5 截获概率计算
截获概率是指截获方接收机的探测概率,是飞行器射频低被截获性能的一个重要的表征参量。对于飞行器来说,截获概率越小则越满足要求;反之,射频低被截获性能则越差。
雷达单传感器截获概率计算定义为
(13)
式中:TI指截获方接收机搜索时间;TOT指雷达发射对截获方接收机的照射时间;PF为截获方接收机调谐到雷达发射频率的概率;PD为雷达发射和接收调谐适当的情况下,雷达发射被探测到的概率。
假设在雷达执行任务时间Tmission内,扫描次数为n,则截获概率为
(14)
式中:gi指在一次扫描中目标被探测的概率。在探测概率的计算中,一次扫描中目标被发现的概率gi计算与检测门限及虚警率等有关。
截获是在有背景回波、大气噪声、雷达信号接收干扰等环境中进行的,要得到有用信号,则必须减少甚至消除这些干扰对截获结果的影响。由门限检测方式可知,对信号检测会出现虚警、漏警两种错误概率,该错误概率与噪声、干扰的波动有关,而目标的波动与检测门限设定等因素有关。通常情况下可采用恒虚警处理方式(Constant False Alarm Rate,CFAR),实时设定门限,以保证虚警概率不变。
实时门限是背景杂波水平、虚警概率门限因子两个因子的乘积,可用z代表通过恒虚警处理得到的杂波水平,t则为门限因子。因雷达信号发射具有随机特性,所以z也有随机特性。假设z的概率分布为P(z),当目标存在时,被检测单元概率密度函数为P(x|H1);当目标不存在时,被检测单元概率密度函数为P(x|H0)。则可得雷达信号探测概率和虚警概率为
(15)
(16)
在一次扫描中计算截获概率的过程为,首先得到目标存在和不存在时被检测单元的概率密度分布函数,对于恒虚警,根据恒虚警处理技术得到杂波水平z,以及根据系统虚警概率要求得到门限因子t,然后根据式(15)和(16)解出截获概率Pd。
2 射频隐身仿真系统设计
2.1 仿真系统架构设计
为更实际地仿真分析射频低隐身性能,依据雷达射频目标特征参量和雷达射频低被截获参量两个方面的计算分析,笔者提出一种多机协同传感器信号级联合仿真评估方法,采用HLA(High Level Architecture)思想构建射频隐身仿真系统架构,以反射内存(Reflective Memory,RFM)执行时间框架(Run Time Infrastructure,RTI)作为运行支撑环境,将特定仿真计算功能与通用的支撑服务相分离,实现多个功能子系统的分布式仿真;各子系统通过反射内存网互联,应用程序之间通过RTI完成实时的数据交互,以实现红蓝双方单机或编队空空对抗规模下的射频低被截获性能计算和分析。
仿真系统硬件包括计算机、服务器、RFM交换机、以太网交换机、视景设备等,硬件架构如图2所示。
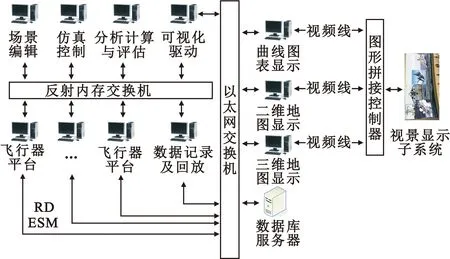
图2 射频隐身仿真系统硬件架构Fig.2 Hardware architecture diagram of RF stealth simulation system
仿真系统主要包括仿真控制与管理子系统、作战场景子系统、飞行器平台子系统(包括红、蓝双方)、记录与回放子系统、分析计算子系统、视景仿真子系统等,功能组成如图3所示。
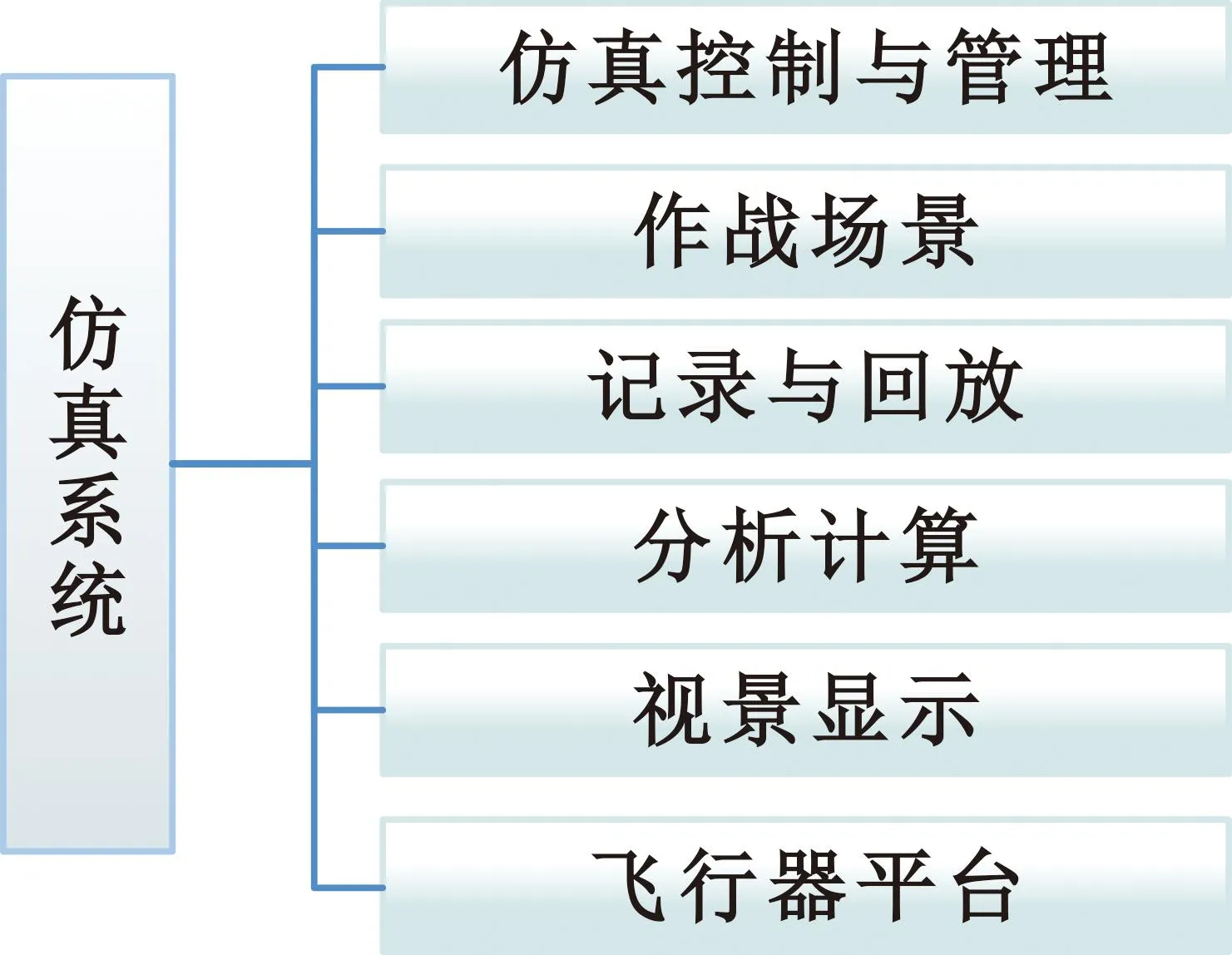
图3 仿真系统功能组成Fig.3 Functional composition diagram of simulation system
飞行器平台子系统负责仿真过程管理模型的实现,包含单个或多个飞行器平台模型,能仿真平台姿态和运动轨迹,并能实现编队间的射频信号遮挡、反射等计算;构建射频辐射、截获接收机等传感器模型,参数均可自定义设置,实现雷达搜索、探测、跟踪等模拟仿真,并能实时嵌入雷达射频隐身策略控制等功能,以及实现截获接收机的测频、测向、测时参数设置,具备信号截获、参数测量、分选识别、定位跟踪等功能。该子系统具备可扩展性,能根据实际需求嵌入更多射频传感器模型。
仿真控制与管理子系统是整个空中对抗的虚拟战场作战过程的总导演,负责整个联邦执行过程的管理与控制,并支持对抗仿真结束后的数据整编和过程回放。
作战场景子系统负责飞行场景的生成、仿真前的想定模型,产生当前想定仿真环境下飞机参数信息,并能实时传输战场想定信息给其余子系统。想定的具体描述决定红蓝双方系统模拟器成员的组成。
分析计算子系统主要在运行过程中调用低被截获性能分析计算模型(辐射强度、截获因子、截获距离、截获球半径、截获概率等分析计算模型),并根据飞行器运动轨迹以及单机辐射策略与编队协同辐射策略,实时分析雷达定位精度、跟踪精度、射频辐射功率和射频辐射能量的变化情况,计算分析结果实时送往视景显示与记录等子系统。
视景显示子系统采用二维、三维和图表显示方式,实时显示各仿真实体及传感器的工作状态、截获性能参数和传感器探测性能等能力指标。
记录和回放子系统能自动实时记录不同平台、时标查询仿真过程中的所有参数,并能实现仿真过程场景的回放。
仿真系统运行原理如图4所示。
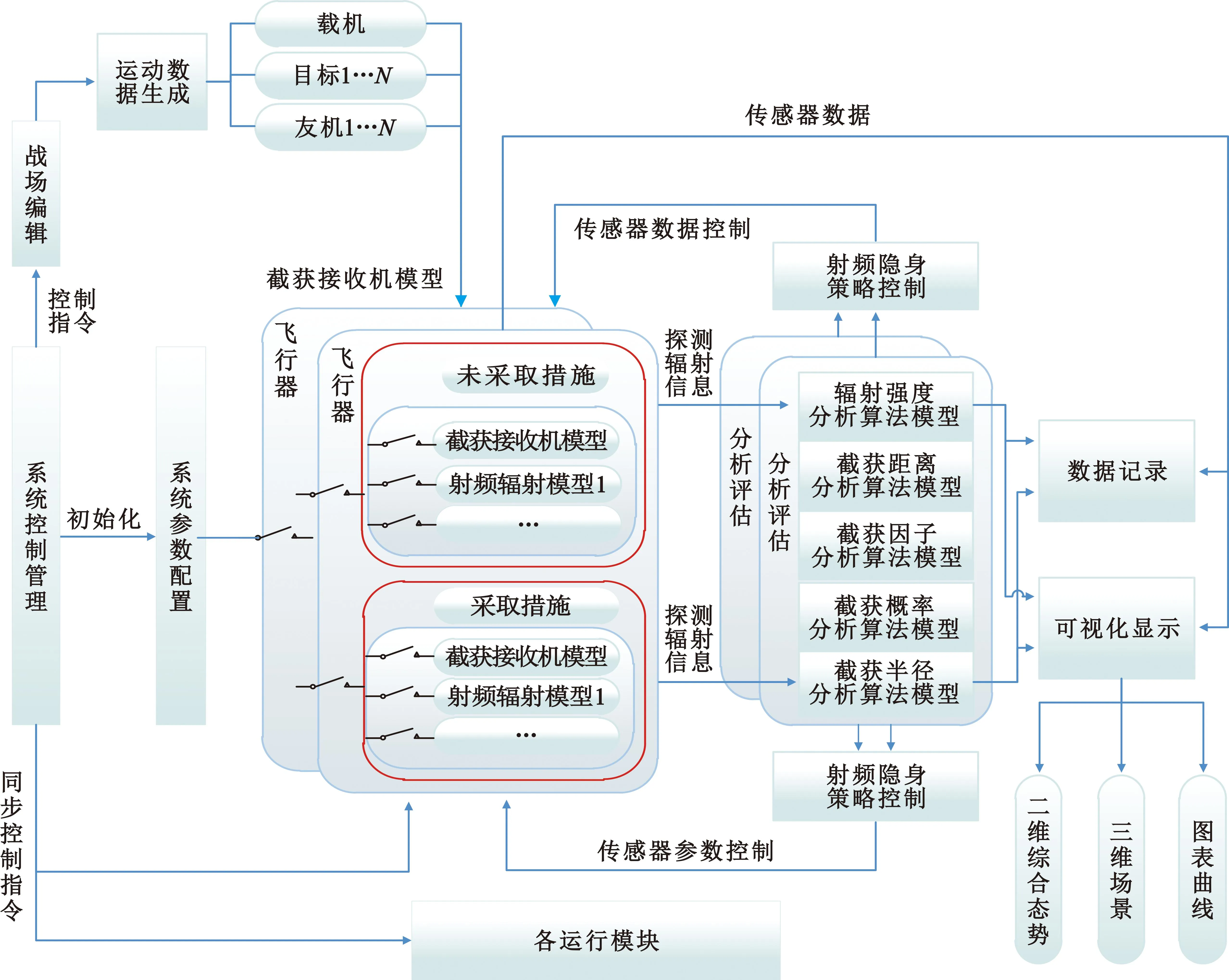
图4 仿真系统运行原理Fig.4 Operating principle diagram of simulation system
仿真系统可以选择单机或多机两种射频隐身评估模式:在单机射频隐身评估模式下,射频隐身策略控制仅实现单个飞行器中传感器工作参数的控制;在多机协同信号级仿真模式下,飞行器中的数据链模块将被激活,用于编队平台间的传感器信息传输,实现多机下的射频隐身策略算法的仿真评估。
为保证仿真验证结果对比的准确性和真实性,仿真验证在同一时间、空间下同时运行采取措施和未采取措施的传感器模型,然后将数据同时输出给分析评估并进行分析与显示。
2.2 截获球半径的近似快速算法
在分析计算子系统中,截获因子、截获距离和截获概率等指标属于复杂度小的表征参量,其计算相对简单,在仿真系统运行中对系统软件资源的占用不多,可适应分布式仿真系统的运行需求。但是,截获球半径属于复杂度大的表征参量,其计算过程需要双重积分过程,经典机械积分计算过程耗时,因此需研究近似快速算法,以提高仿真系统的运行速度。
本文拟采用二元Newton-Cotes数值积分算法实现截获球半径的快速计算。图5所示为经典机械积分和Newton-Cotes数值积分的原理示意图。
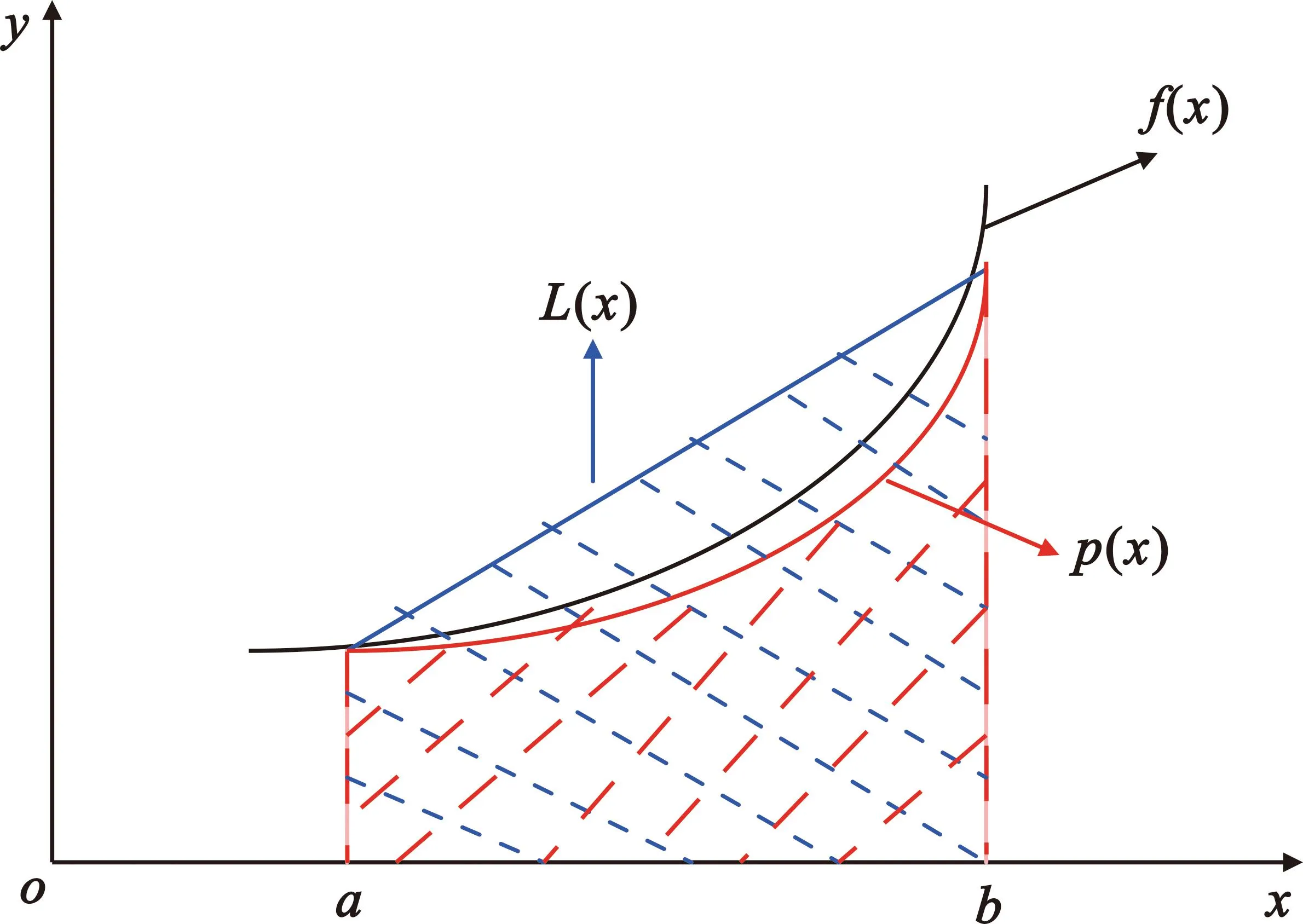
图5 两种积分算法的原理示意图Fig.5 Schematic diagram of two integration algorithms
截获球半径的计算是一个双重积分,需要采用二元机械数值积分法进行计算。为了计算方便,取方位角和俯仰角的固定步长为Δθ和Δφ。截获球半径的近似计算如下式所示:
(17)
式中:M和N为积分区间划分的数量。积分区间划分的数目越多,积分的精度越高,然而计算复杂度却随之提高,所以需要选择合适的划分数目,在满足精度要求的前提下尽量减少计算的复杂度。
采用二元Newton-Cotes数值积分法[14],截获球半径其表达式表述如下:
(18)
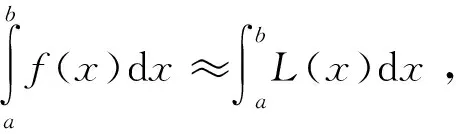
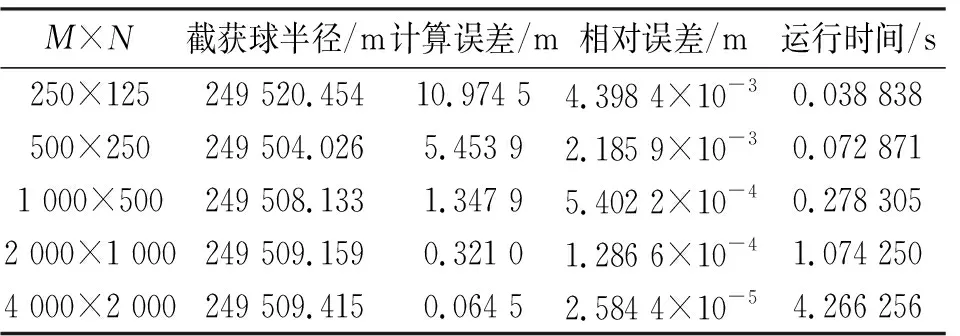
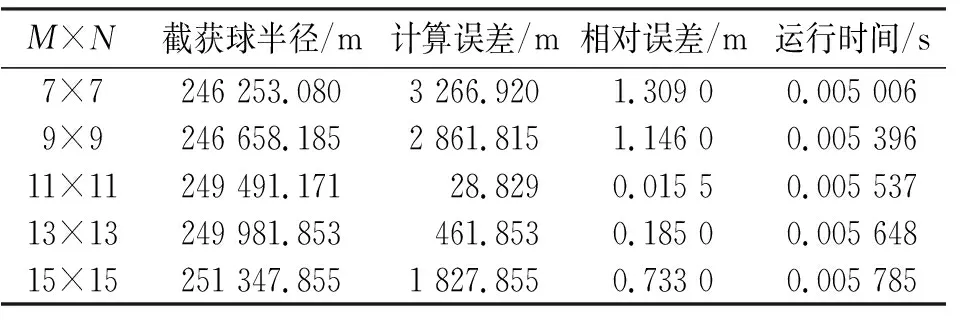
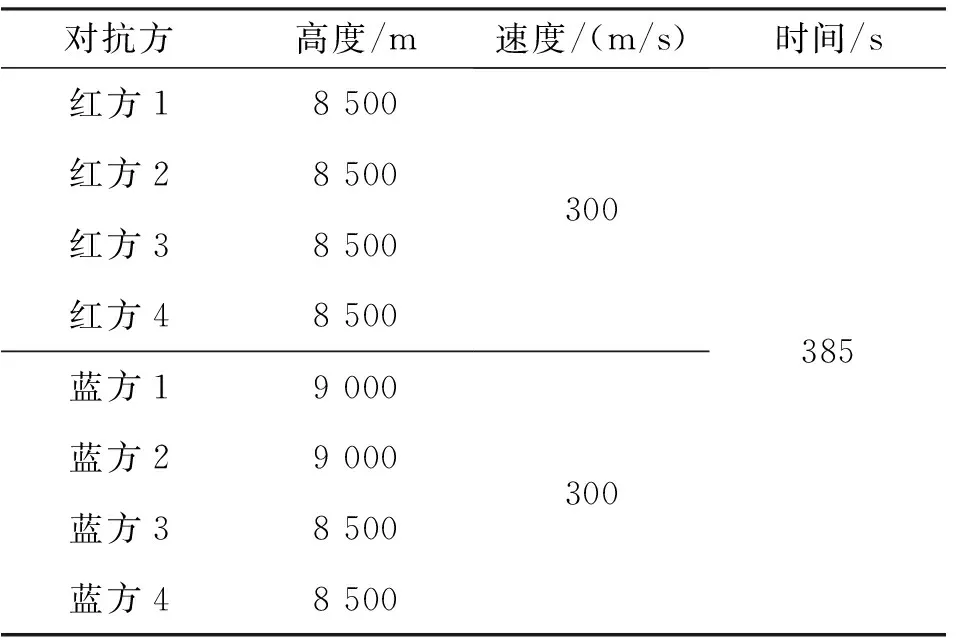
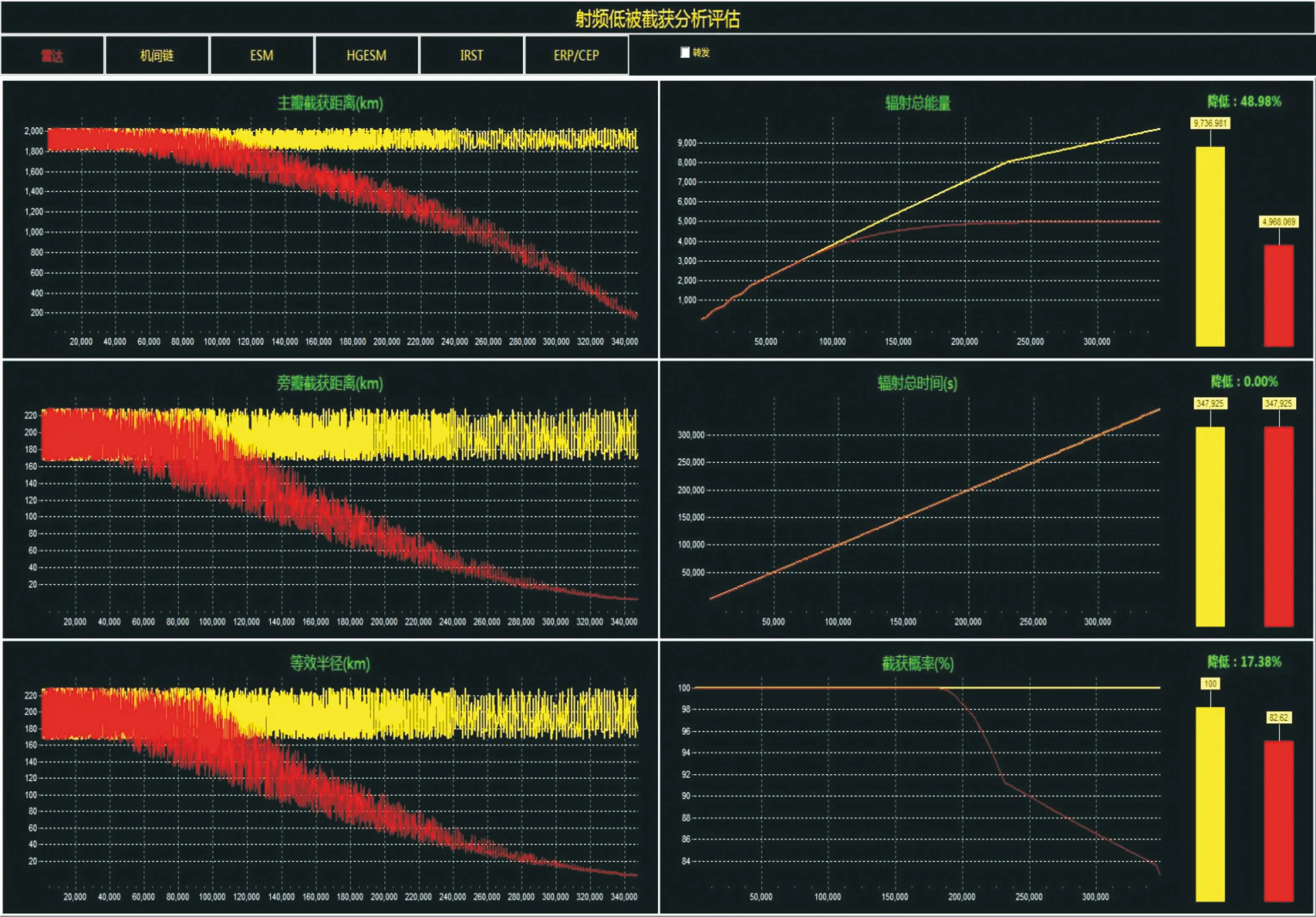
其中对纵坐标[a,b]范围内进行M等分,则积分区域被划分成了M个曲边矩形。然后在对每个曲边矩形的横坐标范围[f1(y),f2(y)]进行N等分。给定区域a≤y≤b,c≤x≤d上的一组节点a≤y0 (19) 针对典型雷达天线图的仿真,将发射功率20 kW、截获接收机灵敏度-60 dB、雷达载频10 GHz、接收机增益1 dB代入计算,可得出截获球半径计算值,同时对两种积分计算结果的截获球半径的计算误差和运行时间进行比较,分别见表1和表2。 表1 截获球半径二元机械数值积分近似计算Tab.1 Approximate calculation of SEVR with two-dimensional mechanical numerical value integral 表2 截获球半径二元Newton-Cotes数值积分近似计算Tab.2 Approximate calculation of SEVR with two-dimensional Newton-Cotes numerical value integral 误差是不可避免的,但误差是衡量仿真逼真度的一个重要指标。从表1和表2中可以看出,二元Newton-Cotes数值积分在相同的积分精度下(相同计算误差量级)的积分节点数大大降低,相同截获球半径的情况下,计算量可由二元机械数值积分的250×125降低到二元Newton-Cotes数值积分的11×11。同时,采用二元Newton-Cotes数值积分近似计算截获球半径的运行速度快了近1个数量级,截获球半径越大,运行速度优势更为明显。因此,采用二元Newton-Cotes数值积分近似方法来计算截获球半径,可以满足仿真系统的分布式实时仿真需求。 仿真系统在建立雷达和截获接收机等单传感器能力模型和参数模型的基础上,嵌入飞行器单机或编队的射频低被截获分析计算模型,并完成飞行器雷达射频低被截获性能分析计算软件输出结果的校核。 采用仿真系统开展编队联合仿真,红蓝双方均设置为4架飞机。 验证场景1:设定ESM灵敏度为-90 dBm,分别仿真雷达在STT模式下不同功率控制步进(1 dB,3 dB,6 dB)以及不同目标机RCS(5 m2,1 m2,0.1 m2)的射频低被截获情况。红蓝双方直线匀速对飞,全程雷达开机工作,初始红1距蓝1为100 km,红1距红2为30 km;终点红1距蓝1为14 km,红1距红2为0.2 km。编队布局见图6,参数设置见表3。 图6 4对4仿真场景1的布局Fig.6 Layout diagram of 4 vs. 4 simulation Scenario 1 表3 4对4仿真场景1的参数设置Tab.3 Parameter setting for 4 vs. 4 simulation Scenario 1 图7所示为采用STT模式、功率控制为分级控制、功率控制步进分别为1 dB,3 dB,6 dB条件下,截获的雷达辐射功率、辐射能量仿真结果。 图7 场景1的截获雷达辐射功率/能量仿真结果Fig.7 Simulation results of intercepting radar radiation power/energy in Scenario 1 由仿真结果可知, 1)在功率控制步进为1 dB的情况下,RCS为5 m2/1 m2/0.1 m2时,雷达辐射功率最大下降52 dB,45 dB,35 dB;在功率控制步进为3 dB的情况下,RCS为5 m2,1 m2,0.1 m2时,雷达辐射功率最大下降51 dB,45 dB,33 dB;在功率控制步进为6 dB的情况下,RCS为5 m2,1 m2,0.1 m2时,雷达辐射功率最大下降48 dB,42 dB,30 dB; 2)相对于不采用功率控制方式,在功率控制步进为1 dB的情况下,RCS为5 m2,1 m2,0.1 m2时,雷达辐射能量最大下降97.84%,94.84%,77.55%;在功率控制步进为3 dB的情况下,RCS为5 m2,1 m2,0.1 m2时,雷达辐射功能量大下降96.26%,94.28%,72.09%;在功率控制步进为6 dB的情况下,RCS为5 m2,1 m2,0.1 m2时,雷达辐射能量最大下降96.11%,93.15%,62.07%。 验证场景2:设定ESM灵敏度为-90 dBm,分别仿真雷达在TAS、MTT模式下不同功率控制步进(1 dB,3 dB,6 dB)以及不同目标机RCS(5 m2,1 m2,0.1 m2)的射频低被截获情况。红蓝双方直线匀速对飞,全程雷达开机工作,初始红1距蓝1为200 km,红1距红2为100 km;终点红1距蓝1为10 km,红1距红2为0.2 km。编队布局见图8,参数设置见表4。 图8 4对4仿真场景2的布局图Fig.8 Layout diagram of 4 vs. 4 simulation Scenario 2 表4 4 vs. 4仿真场景2的参数设置Tab.4 Parameter setting for 4 vs. 4 simulation Scenario 2 图9所示为采用TAS模式、功率控制步进为1 dB条件下,雷达信号截获距离、截获球半径、截获概率仿真结果。由仿真结果可知,红蓝双方平台相距180 km后,红方开始跟踪目标,并进入功率控制模式。相对于不采用功率控制方式,针对红方编队雷达信号,旁瓣信号截获距离最大下降200 km,截获球半径最大下降200 km,截获概率最大下降10.44%。 图9 场景2的TAS模式雷达信号截获仿真结果Fig.9 Simulation results of TAS mode radar interception in Scenario 2 图10所示为采用MTT模式、功率控制步进为1 dB条件下,雷达信号截获距离、截获球半径、截获概率仿真结果。由仿真结果可知,红蓝双方平台相距180 km后,红方开始跟踪目标,并进入功率控制模式。相对于不采用功率控制方式,针对红方编队雷达信号,旁瓣信号截获距离最大下降200 km,截获球半径最大下降200 km,截获概率最大下降17.38%。 图10 场景2的MTT模式雷达信号截获仿真结果Fig.10 Simulation results of MTT mode radar interception in Scenario 2 综上所述,可得以下结论: 1)当飞行器雷达采用STT模式,采用功率自适应控制方法能有效降低单机或编队的雷达辐射功率、辐射能量,控制步进越小,低被截获效果越好。通过仿真评估,雷达辐射功率能降低30 dB以上,辐射能量能降低62%以上; 2)当飞行器雷达采用TAS模式时,采用功率自适应控制方法能有效降低单机或编队的信号被截获概率,旁瓣信号截获距离和截获球半径最大下降200 km,被截获概率最大下降10%以上; 3)当飞行器雷达采用MTT模式时,采用功率自适应控制方法能有效降低单机或编队的信号被截获概率,旁瓣信号截获距离和截获球半径最大下降200 km,被截获概率最大下降17%以上。 对飞行器雷达射频低被截获性能的分析与仿真评估一直是开展飞行器射频隐身设计的重点关键环节。为更好地贴合实际分析评估飞行器雷达射频低被截获性能,本文提出了一种用于多机协同传感器信号级联合仿真评估方法,结合雷达射频特征和雷达射频低被截获性能表征指标,构建作战场景、飞行器平台、射频辐射源、截获接收机模型以及低被截获性能分析算法模型,对多机编队协同等作战样式下的雷达射频低被截获性能进行仿真分析评估。同时针对复杂度大的表征参量计算研究其近似快速算法,以提高仿真系统的运行速度。仿真结果能直观表明采用不同模式、不同功率控制策略的雷达射频信号低被截获性能。 结合某型号项目,开展了多机编队协同等样式的外场试验和测试,本仿真系统的仿真评估结果与外场试验结果基本一致,证明本仿真系统能更贴合实际对雷达射频低被截获性能进行仿真分析评估,可为飞行器雷达射频隐身设计提供支撑依据与评估验证环境。 本文主要针对飞行器中雷达的射频隐身进行仿真分析,而飞行器在相互协同工作时数据链通信本身也是一个辐射源,飞行器的射频隐身需要平衡多种传感器共同作用下的效能,因此后续将重点针对数据链通信的射频隐身效果进行仿真评估。
3 射频隐身仿真分析和评估
4 结束语
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
汽车工程师(2021年12期)2022-01-17
军民两用技术与产品(2021年12期)2021-03-09
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
电子制作(2018年2期)2018-04-18
电子制作(2016年1期)2016-11-07
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
腹腔镜外科杂志(2016年9期)2016-06-01
