两栖应急救援运载平台水动力学仿真技术研究
2024-01-21 13:07:00李占龙孙海瑞诸小武郝鹏祥罗骞张正高山铁
科学技术与工程 2023年36期
李占龙, 孙海瑞*, 诸小武, 郝鹏祥, 罗骞, 张正, 高山铁
(1.太原科技大学车辆与交通工程学院, 太原 030024; 2.贵州詹阳动力重工有限公司, 贵阳 550006)
中国自然灾害多种类、宽地域、高频率的特征愈发突出[1],灾害的突发性和异常性愈发明显,使风险防控和应急处置面临巨大挑战。加大先进适用装备配备力度,构建中国公共安全应急救援装备体系,是应对极端地域环境、开展高效救援-运输、全面实现“全灾种、大应急”背景下科学应急和智慧应急的重要保障[2]。在面对极端灾害环境、复杂地形条件及多灾种并发的大应急救援时,专常兼备、反应迅速、上下联动的应急救援能力仍显不足,尤其对于具备涉水越野能力、多功能救援能力、水陆两栖救援能力的需求越来越急迫[3]。
水陆两栖车辆是一种具有陆地通行与水上航行能力、同时具备车辆与船舶两者性能,能够实现入水与登录功能的特种车辆。因其能在各种复杂的地形环境下作业,故多应用于应急救援领域。由于水陆两栖车辆主要作业场景为陆地,故其外形多为陆地车辆样式的非流线造型,且结构复杂,在水下航行时有着复杂的水下动力学特性。设计时在保证其陆地上的通过性和作业功能的前提下,还要考虑其水下的航行性能,因此在设计阶段对于水陆两栖车辆的水下动力学分析十分重要。针对水陆两栖车辆复杂的水下特性,中外学者开展了一系列研究,现将从水陆两栖车辆的阻力特性、稳态研究、操纵性研究、动力装置4个方面进行总结与阐述,为后续学者研究提供参考。
1 阻力特性
水陆两栖车辆结构复杂,流线型差,水下航行受到的阻力较大,其外形结构如图1所示。

图1 水陆两栖救援车辆Fig.1 Amphibious rescue vehicle
同船舶相似,其阻力类型主要分为形状阻力、兴波阻力和摩擦阻力,每种阻力在不同车型、不同速度下占比各不同。通过实车试验或仿真模拟计算对航行过程中的水陆两栖车辆进行阻力分析,提出减阻方案,实现水陆两栖车辆的减阻增速,提高其快速性。
1.1 阻力分析方法
传统水陆两栖车辆水动力学分析主要采用实车水池试验,试验周期较长,成本较高。随着计算机技术的发展,计算流体动力学(computational fluid dynamics, CFD)被广泛应用于船舶领域,用于研究船体周围流场和其快速性。水陆两栖车辆下水后为一种特殊船体,其水上性能的研究与船舶有一定的相似性,CFD因此也被应用于水陆两栖车辆水下性能研究。相比于实车试验,计算机仿真模拟使水陆两栖车辆阻力预测周期更短,成本更低,能较为准确地分析阻力的大小及成分。
李莉等[4]使用非结构化网格、两方程k-ε湍流模型(k为湍动能、ε为耗散率)和有限容积法求解水陆两栖车辆模型的速度场和压力场,预测了其航行阻力,并实现流场可视化分析。徐国英等[5]采用相同方法与模型,通过混合网格布置方法,对不计自由面的水陆两栖车辆的黏性绕流场进行数值模拟,分析表明该方法低速情况下对水陆两栖车辆阻力预报准确度较高。徐国英等[6]采用slidingmesh方法,使用k-ε模型,混合网格布置方法,较准确地模拟了水陆两栖车辆水上行驶过程中阻力和浮态随速度变化规律,为水陆两栖车辆的水上性分析提供了参考依据。李玉良等[7]以实验数据为基础,选择VOF(volume of fluid)多相流计算模型,混合网格划分方法,给出了计算结果收敛评价指标,并选用稳态、瞬态静网格和瞬态动网格对水陆两栖车辆流体体积函数多相流模型模拟计算,实现模拟阻力误差在10%以内。王涛等[8]基于计算流体力学,使用Fluent软件对不计自由面的水陆两栖车辆黏性绕流场进行模拟仿真,得到了较好视觉效果与详细的流场信息,如图2[8]所示,展示了模拟与试验的流场状态比较,对比两者压力分布特点基本相同,表明仿真的可行性。

图2 速度v=1.61 m/s时模拟和实验的流场状态比较[8]Fig.2 Comparison of flow field state between simulation and experiment when velocity v=1.61 m/s[8]
宋桂霞等[9]采用k-ε湍流模型并使用混合网格对水陆两栖车辆模型的流场进行离散,模拟车体水中绕流及阻力情况,对比试验证明数值模拟在水陆两栖车辆阻力分析中的可行性。王涛等[10]采用雷诺时均N-S方程(Reynolds equation,RANS)、剪切应力运输型k-ε模型及有限体积法,通过非结构网格划分处理,对水陆两栖车辆模型的绕流场进行了数值模拟,结果误差约为5%,并得到各阻力成分的系统参数及所占比例,如图3[10]、图4[10]所示,当速度较低时,水陆两栖车辆阻力主要为黏压阻力,占比在75%以上,但随着速度增加,兴波阻力的比重在逐渐增大。李莉等[11]建立了某型号水陆两栖车辆兴波阻力数学模型,计算了兴波阻力,并采用CFD方法进行了车体外部的流场分析,计算和仿真结果同试验结果吻合较好,为两栖车辆阻力预测与降阻提供参考。Sebnem等[12]研究了两栖运兵车的水下通过性,通过自推试验,记录分析车辆航行过程中不同速度下的阻力和侧向力,并研究车艏、车尾的水流轨迹,对推进器的选型提出一定意见,为水陆两栖车辆整体设计提供了一定参考。高富东等[13]以某型两栖车为研究对象,考虑动升力和自由液面的影响,运用Fluent软件对其进行高速迎浪航行运动状态的三维绕流场进行了数值模拟研究,解决了由于忽略兴波特性导致数值计算结果随航速提高误差不断增大的问题,为两栖车外形设计提供理论依据。

图3 各阻力成分随速度的变化[10]Fig.3 Variation of resistance components with speed[10]

图4 各阻力成分所占比重随速度的变化[10]Fig.4 Change of proportion of each resistance component with speed[10]
郭张霞等[14]通过N-S(Navier-Stokes,N-S)方程,结合k-ε模型,对不同航速的水陆两栖车辆进行黏性流场数值模拟,获得水陆两栖车辆不同阻力类型的阻力系数及总阻力,模拟精度较高,方法可靠。Wang等[15]采用雷诺平均N-S方程、混合网格划分的方法对水陆两栖车辆进行水动力学模拟仿真,与试验结果对比结误差保持在12%以内,仿真与试验结果的一致性较高。杜子学等[16]采用数值仿真的方法对水陆两栖车辆水上绕流场进行数值模拟,准确得到了其航行阻力和兴波特性,为水陆两栖车辆的设计优化提供一定参考。赵秀国等[17]采用CFD对双厢履带式卫生急救车的水上行驶阻力特性进行了仿真,发现前后车之间区域以及后车后部形成涡旋运动,大幅度增加黏压阻力;前后车前部方形结构使这些区域形成高压区,形成车体绕流阻力;但因其航行速度较低,形成的兴波阻力较小,为双厢两栖车的阻力分析提供一定参考。徐一新等[18]采用k-ε两方程湍流模型并采用内密外疏的网格对流场进行离散,模拟发现车尾形状和车轮变化对绕流场及阻力变化有较大影响,行驶环境的改变同样会对阻力产生较大影响,为水陆两栖车辆局部优化提供一定指导。万晓伟等[19]基于CFD外流场数值计算方法,构建水陆两栖车辆水上运动模型,将运动模型引入车辆水上绕流场计算,实现车辆水上航态与车辆绕流场的同步计算,对较精确预测了水陆两栖车辆航行阻力。More等[20]采用CFD理论对两栖装甲车进行模拟分析,得出其稳定性结果与阻力值,通过对两栖装甲车等比缩放,进行拖曳试验,将测量数据与模拟数据对比证明了数值模拟方法的可行性。Jiang等[21]对轮式两栖装甲车模拟仿真,分析了其结构与阻力的关系,探究了水陆两栖车辆影响阻力与航态的原因并提出解决手段,并开发了一种高效的水陆两栖车辆水动力性能分析方法,应用前景广阔。Suresh等[22]采用数值模拟的方法模拟了两栖艇的水下运动,分析其水动力性能,为小型两栖车辆水下性能分析作提供了参考。王少新等[23]基于CFD方法和重叠网格技术建立双厢水陆两栖车辆多体运动的数值仿真模型,采用VOF、DFBI(dynamic fluid body interaction)方法对其进行多自由度直航状态模拟,较好地实现双厢水陆两栖车辆水动力性能预报,为双厢水陆两栖车辆设计分析提供参考。图5[23]为仿真设置,其中L为双厢水陆两栖车的车长,试验池长为2.5倍车长,宽为1.5倍车长。

图5 边界条件设置[23]Fig.5 Setup of boundary conditions[23]
周利兰等[24]采用雷诺平均方程的有限体积方法对静水中有无开口状态的水陆两栖车辆阻力及航态进行数值模拟,结合叠模计算结果对其各阻力成分分析,得出阻力与速度的关系,通常采用与船舶质量相关的体积弗劳德数Fr▽表示船的相对速度,图6[24]、图7[24]分别为Fr▽=1.297时的自由液面波形图和纵截面压力分布,开口模型车首波峰和摩擦阻力较大,开口内有负压,压差阻力较大,为水陆两栖车辆局部优化提供了一定的参考,其中弗劳德数Fr▽定义为

图6 有无开口的水陆两栖车辆模型的自由液面波形图对比(Fr▽=1.297)[24] Fig.6 Free surface wave pattern comparison of models with and without openings(Fr▽=1.297)[24]

图7 有无开口的水陆两栖车辆模型纵截面压力分布对比[24]Fig.7 Comparison of longitudinal pressure distribution of amphibious vehicle models with and without openings[24]

(1)
式(1)中:v为两栖车辆水下航行速度;V为车体运动的排水体积;g为重力加速度,取值为9.81 m/s2。
张大朋等[25]利用Maxsurf Motions程序中的切片理论和面元法探讨其在船舶耐波性分析中的可行性,并分析Motions模块计算误差原因,结果表明:其可以对船舶实现较为准确的运动响应以及波浪增阻的计算,并对于附加质量系数和阻尼系数的中高频波段的计算精度较高,纵摇响应的计算精度较高。相对于两栖车辆的耐波性计算,此方法也有一定的借鉴指导作用。
1.2 局部优化减阻
为了降低水陆两栖车辆水下航行阻力、提高其水下航行机动性及快速性,通过对水陆两栖车辆进行模拟仿真,分析影响其航行阻力的因素,提出局部优化措施,实现水陆两栖车辆的减阻增。
加装滑板可以有效降低水陆两栖车辆的航行阻力,防止车辆水下出现埋首现象,按位置划分,滑板分为防浪板、尾翼板和侧翼板,不同位置的板在水陆两栖车辆航行时有着不同的作用。
宋桂霞等[26-27]仿真分析发现,尖型防浪板相较于平型防浪板对水流有着更好好的导流作用,能够降低水的冲击力,减少兴波现象和航行阻力,且将车轮收起可减小33%的形状阻力,为水陆两栖车辆减阻方法提供一定思路。Robert等[28]通过实车试验,发现在水陆两栖车辆前加装竖直放浪板,能够平缓车体产生的弓形波,减小阻力,并测得最佳安装位置。周景涛等[29]采用滑移网格方法实现车辆航行姿态的变化,在Fluent中模拟有无防浪板情况的阻力、吃水深和纵倾角随速度的变化规律,发现较高速度下,间歇式防浪板能有效减少总阻力、吃水深和纵倾角,提高了水陆两栖车辆水上行驶的稳定性。图8[29]为模拟车首兴波现象,显示加装防浪板可以有效减少车首兴波现象。

图8 车首的兴波现象[29]Fig.8 Wave making phenomenon of the car head[29]
余祖耀等[30]阐述了水陆两栖车辆滑板滑行机理,分析水陆两栖车辆在不同滑板角度组合和不同速度下的阻力和升力特性,求出最佳滑板角度组合范围,图9[30]为前后滑板角度组合α/β/θ,其中,α为首端上夹角,β为首端下夹角,θ为尾端夹角;图10[30]为不同角度组合的阻力随速度变化曲线,当组合角度α/β/θ=8°/15°/25°时减阻效果最好,为水陆两栖车辆提供了优化思路。

图9 前后滑板组合[30]Fig.9 Front and rear sliding plate combination[30]

图10 各滑板角度组合在不同航速下的阻力曲线[30]Fig.10 Resistance curve of each slide angle combination at different speeds[30]
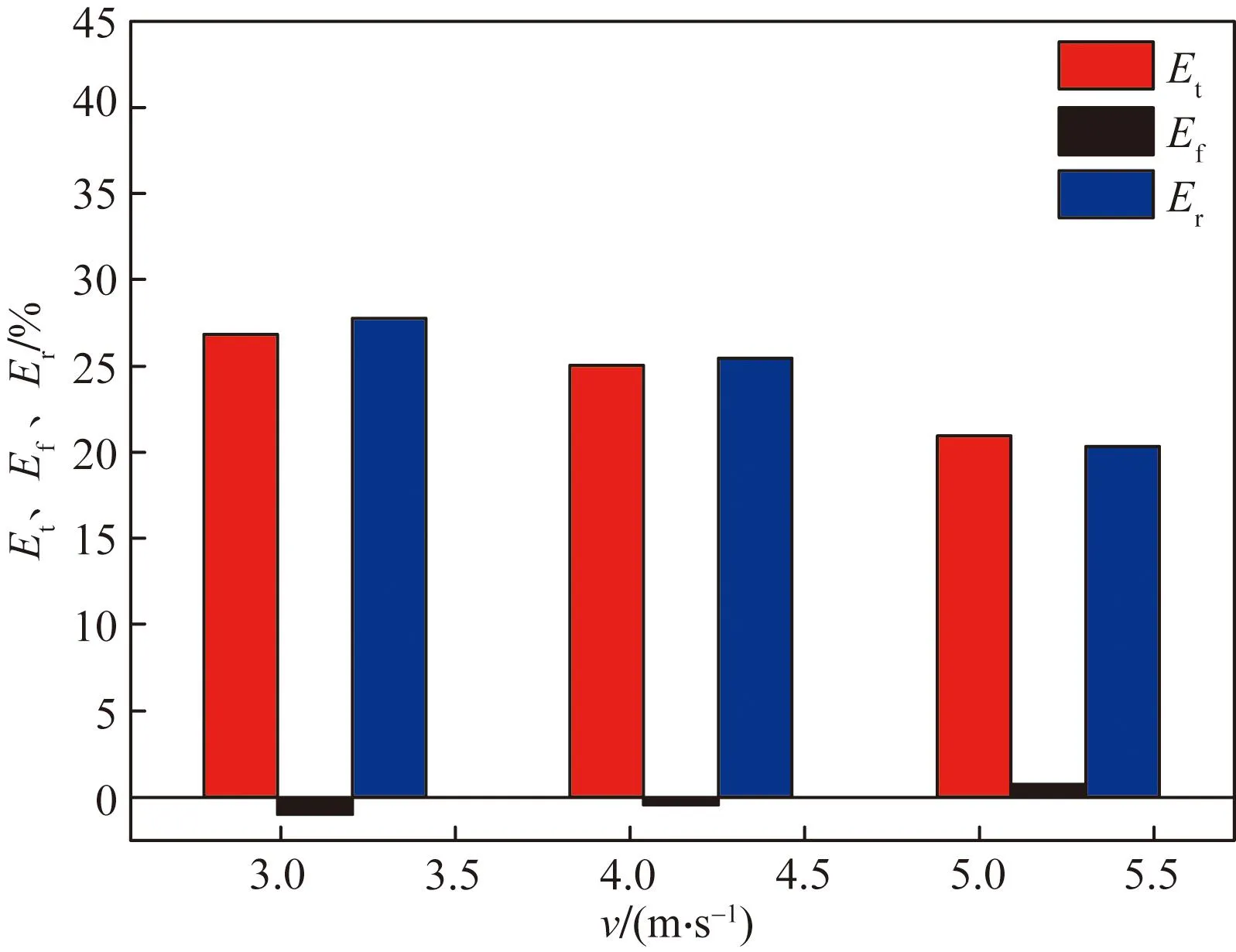
Et为总阻力的减阻率;Ef、Er分别为摩擦阻力和剩余阻力的减阻率;v为两栖车航行速度图11 阻力成分减阻率分析(θ = 10°,L = 156 mm) [35]Fig.11 Analysis of drag reduction rate of drag component(θ=10°,L=156 mm)[35]
毛明等[31]通过模拟仿真,分析了防浪板对整车航行阻力、升力、纵向俯仰力矩的作用,分析发现分段式防浪板较于弧型和平型防浪板有着最佳的工程结构;防浪板宽度最佳为车体宽度的0.75倍;与车体距离增加,升力减小,航行阻力增加;与车底角度越大,纵向恢复力矩增加显著。Lee等[32]通过拖曳与自航试验探究了防浪板与尾翼板对水陆两栖车辆阻力与纵倾角的影响,并发现推进器喷射水流能够增强尾翼板的升力。Sergei等[33]提出了水陆两栖车辆翼板对于提高水陆两栖车辆航行速度的解决方案,探究其对双体车作用机理。
Sun等[34]通过CFD仿真模拟与模型拖曳试验的方法探究了尾翼板角度和长度对阻力性能的影响,为水陆两栖车辆设计提供参考。孙承亮等[35]对分段式水陆两栖车辆分别进行了水池试验和仿真研究,两者研究结果一致性良好,仿真发现车体纵向重心为540~560 mm时车体阻力最小,当速度为3 m/s时,长度L为156 mm与水平面夹角θ为10°的减阻效果最好,减阻率达到34.3%,图11[35]为减阻率分析,可以看出,剩余阻力的减阻率对减阻的贡献在90%以上。
杜尊峰等[36]采用剪切应力传输SSTk-ω湍流模型以及重叠网格技术,对高速状态下两栖平台的静水直航进行CFD数值仿真计算,比较不同压浪板作用下平台姿态及稳定性的变化特性,发现压浪板可减小航行纵倾角并提高平台稳定状态下能够达到的最大航速,并且压浪板的下旋角度越大,其姿态稳定性的影响越显著,为两栖车实现减阻增速提供一定的指导作用。
水陆两栖车辆车体多为钝体,因此在水下受到的阻力较大,在保证其陆地作业能力的同时,通过优化车体外形,降低车体产生的形状阻力,使水陆两栖车辆在水下航行时受到的阻力更小。
董阳等[37]对水陆两栖车辆模型进行静水航行的数值模拟,通过对车体黏压阻力系数和摩擦阻力系数的分析,提出减小车首倾角和车首车尾圆角化局部优化方案。高富东等[38-39]对车体绕流场进行三维瞬态数值计算,得到绕流场的速度与压力分布、阻力和兴波特性,并提出了两栖车的外形优化方案,验证减阻效果可达51.2%,结果误差低于9%,为两栖车优化外形提供一定参考。郑翔玉等[40-41]通过数值模拟的方法分析了轮式水陆两栖车辆车轮提升与非提升情况下的行驶阻力,证明车轮提升能有效减小航行阻力。郑翔玉等[42]设计了一种车轮收放装置,并通过模拟分析,证明车轮收起对水陆两栖车辆航行阻力有很好的减小效果。通过调整水陆两栖车辆的纵倾角,改变其水下的航行姿态,实现水陆两栖车辆的减阻提速。李玉良等[43]采用VOF多相流模型进行仿真计算,发现适当增大车辆纵倾、在裙板上安装薄翼板,能有效减小车体阻力。刘勇等[44]通过仿真分析,发现排水型水陆两栖车辆最佳航行角为0°,滑水型水陆两栖车辆最佳航行角为5°。剧冬梅等[45]通过对水陆两栖车辆数值计算与试验数据对比分析,研究了高速水陆两栖车辆不同纵倾角下的阻力特性,如图12[45]所示,在小纵倾角(≤5°)情况下随着弗劳德数Fr增加阻力不断增大,大纵倾角(≥10°)情况下随着Fr增加阻力不断增大,阻力先增加后趋于稳定。在高速行驶时适当的增大纵倾角对于减小航行阻力尤为重要。
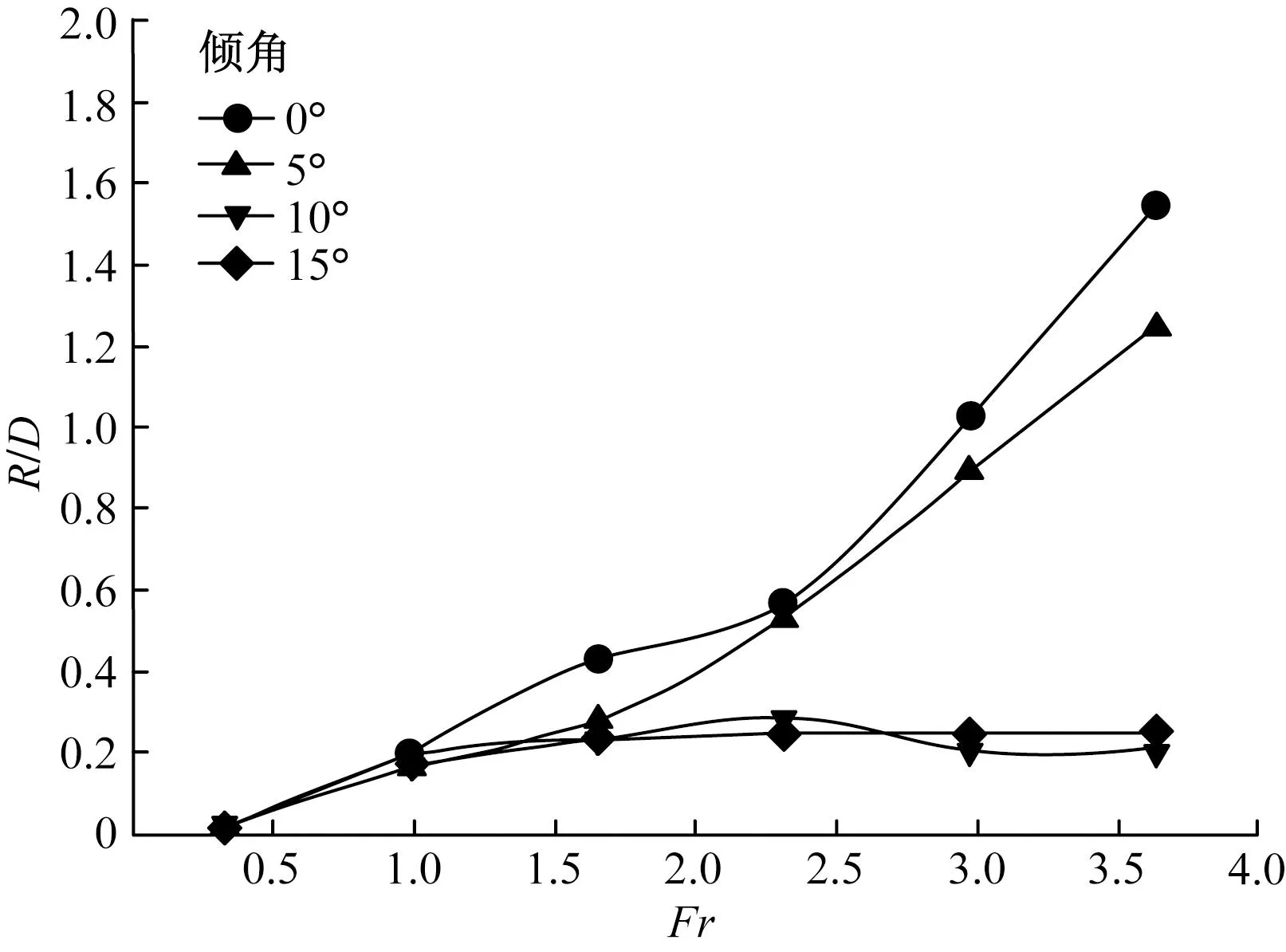
R为实际阻力;D为车重图12 不同纵倾角下的阻力特性曲线[45]Fig.12 Resistance characteristic curves at different trim angles[45]
2 稳态研究
稳态主要包括水陆两栖车辆的浮性和稳性。良好的稳态性能能够保证水陆两栖车辆水下正常航行,设计阶段通过试验仿真对水陆两栖车辆稳态进行研究分析,可以探究水陆两栖车辆水下航行过程中的稳态变化,提高水陆两栖车辆水下航行性能。
2.1 浮性分析
水陆两栖车辆在各种装载情况下浮于静水后保持的平衡状态为水陆两栖车辆的浮性,主要分为正浮、横倾、纵倾和任意浮态。
刘锋等[46]利用SolidWorks建立模型与坐标系,采用二分法求解了水陆两栖车辆定姿态浮心位置,通过对车辆的受力、运动分析确定其浮态,并使用API函数对SolidWorks进行二次开发,编写水陆两栖车辆静水稳性分析程序,实现快速精确的浮性计算与稳性分析。
2.2 稳性分析
水陆两栖车辆在水中航行过程中会受到风浪等外力的影响,使车体产生一定的倾斜,外力消失后能恢复平衡位置的能力叫稳性,稳性对水陆两栖车辆载人载货及正常航行至关重要。
姚新民等[47]研究了水陆两栖车辆水上稳性问题,建立了基于水动力学的振动模型,对模型的求解过程进行讨论。潘玉田等[48]提出在水陆两栖车辆加装减摇鳍控制系统以减少其横摇的方案,探讨其工作原理、实现方法,并使用MATLAB对控制系统进行仿真验证该方法的可行性。徐国英等[49]对水陆两栖车辆在波浪中的线性摇荡问题进行了描述,实验得出其行走机构在横摇、垂荡情况下的共振频率和无因次阻尼系数;针对摇荡问题,提出调整车辆设计属性和改变航行速度或航向角的改善方法。宋桂霞等[50]通过降低悬架系统定位点的方法改进了水陆两栖车辆车轮收放功能,并分析了定位点降低引起的抗倾能力下降的原因,提出增大螺旋弹簧刚度和稳定杆直径的改善方法,并仿真验证了其可行性。王涛等[51]采用N-S方程结合造波机理论模拟出数值波浪水池,对水陆两栖车辆波浪中的运动进行数值模拟,实现了水陆两栖车辆耐波性的准确预测,为水陆两栖车辆耐波性研究提供了参考,并有效预报其在波浪航行的阻力、升力、航态变化。徐国英等[52]对5种两栖装甲车辆在波浪中航行的摇荡问题进行了研究分析,提出在航行时通过增大水陆两栖车辆阻尼系数的方法来减小猛烈的摇荡,通过改变车辆航向和航速以避开谐摇区的方法,为后续研究提供一定的参考。图13[52]显示了3种摇荡类型。

图13 3种典型摇荡[52]Fig.13 Three typical toss[52]
马新谋等[53]提出根据水陆两栖车辆自由横摇衰减曲线确定实验的能量损耗函数,并使用最小二乘法确定非线性阻尼系数的方法,通过数值仿真模拟自由横摇衰减曲线,并由此方法估计出平方型阻尼系数,证明了该方法的可行性。赵彬等[54]构建水陆两栖车辆水上航行数学模型,采用混合耦合算法和动网格技术研究其静水直航状态下的姿态变化规律,模拟结果通过与试验值对比,验证了该方法的可行性,表1[54]列出了典型时刻车体仰视图的压力变化云图和纵剖面速度矢量图,表2[54]为模拟与试验绕流形态对比,可以看出,模拟效果较好。

表1 典型时刻车体压力云图及速度矢量图[54]Table 1 Contours of static pressures and velocity vectors at different moments[54]

表2 数值模拟与实验的绕流形态对比[54]Table 2 Comparison of simulation and experimental results for sailing[54]
王少新等[55]采用计算流体力学与重叠网格计技术建立水陆两栖车辆水中航行运动数值模型,计算了静水环境、不同航速下的阻力、垂荡和纵摇性能,图14[55]为不同航速V下的压力,显示了水陆两栖车辆在运动稳定时的运动状态。宋超等[56]构建了基于模型试验与遗传算法系统辨识思想的水陆两栖车辆摇荡运动辨识模型,并验证了其可行性。
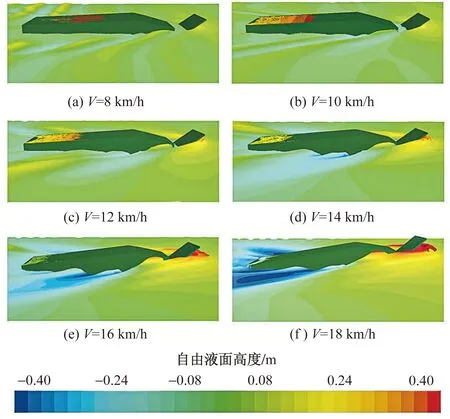
图14 不同航速下水陆两栖车辆运动姿态[55]Fig.14 Motion attitudes of amphibious vehicles at different speeds [55]
3 水陆两栖车辆水下操纵性研究
操纵性是指水陆两栖车辆水下航行时保持或改变航向、航速和位置的能力,是其固有的特性。其主要为方向性,包括航行稳定性与转向灵活性,体现了水陆两栖车辆水下航行的机动性。
袁益民等[57]提出一种以刚体空间运动方程为基本控制方程,结合水动力学方程,建立用于描述水陆两栖车辆操纵运动的数学模型,实现准确预报水陆两栖车辆的操纵运动,并对比验证了其可行性。詹超等[58]提出基于运动力学和阻尼力反馈调节的海上滑行水陆两栖车辆水动力解算模型,根据水陆两栖车辆的受力情况进行阻尼反馈调节,提高了水陆两栖车辆的滑行控制能力,实现水陆两栖车辆的水动力特性数值优化解算。
4 水下动力特性分析
在水下航行时,水陆两栖车辆水下动力由推进装置提供,主要包括轮胎推进装置、履带推进装置、螺旋桨推进装置、导管螺旋桨推进装置和喷水推进装置等。推进器与两栖车间有着复杂的相互作用,研究加装推进器的两栖车水动力特性对于其正常航行十分重要。
徐国英等[59]以RNGk-ε湍流模型、多参考系坐标模型MRF(multiple reference frame,MRF)为基础,对推进器进行非结构网格划分,通过Fluent对其流场进行模拟计算,分析了两种形状车尾对喷水推进器进口流场速的影响。Kim等[60-61]对加装推进器的等比水陆两栖车辆模型进行自航试验,并采用国际拖曳水池会议于1996年提出的ITTC 96方法对推进器进行分析,研究了叶轮顶部间隙的变化对全车功率的影响,后续探究了推进器直径大小对水陆两栖车辆航行速度的影响,发现喷水叶轮直径增加35%可使功率降低38%,车速可提高13%,为水陆两栖车辆推进器选型作一定探究。欧礼坚等[62]采用Fluent软件对黏性流场中导管螺旋桨的水动力性能进行了计算研究,模拟计算了导管螺旋桨在不同进速系数下的推力系数、转矩系数、导管螺旋桨表面压力分布,计算结果与模型试验结构吻合,对两栖车选用水下推进器型号有一定的指导作用。王野等[63]设计了一种具备航向保持和姿态调整功能的单矢量喷水推进器系统,计算出推进器的推力,并仿真得出了装有推进器的水陆两栖车辆的航行特性,通过与试验数据对比验证了推进器对航行姿态的影响。图15[63]为车体结构示意图,图16[63]为实车试验场景。

图15 水陆两栖车辆实体分化示意图[63]Fig.15 Schematic diagram of physical differentiation of amphibious vehicles[63]

图16 自由自航航向保持试验[63]Fig.16 Free self-propelled heading maintenance test [63]
5 结论
(1)水动力学仿真技术是水陆两栖车辆设计过程中不可或缺的步骤。传统分析主要依据于经验和实车模型试验,需要投入较大人力物力。随着计算机技术的进步,各种成系统仿真软件在不断出现并完善,为水陆两栖车辆的水下动力学分析提供了更为专业的求解方法,使求解过程更加简化而高效。
(2)航行阻力是水陆两栖车辆水动力研究热点方向,是影响水陆两栖车辆水下航行速度的关键因素。通过对现有理论的应用,探索新的阻力分析方法,将计算机仿真分析结果与试验数据对比不断提高仿真精度,实现仿真的实际应用,为水陆两栖车辆的设计、结构优化提供更准确便捷的分析手段。
(3)水陆两栖车辆的水动力分析包括航行阻力、水下稳态、水下操纵性、水下动力特性几方面,在设计水陆两栖车辆时要全方位考虑这些方面,现有的商业软件多只是涉及部分方面的仿真,往往很难系统分析。将水陆两栖车辆水动力学分析不同方面进行整合是仿真技术发展的趋势,实现从水陆两栖车辆水动力学的局部分析到全局设计优化,使水陆两栖车辆的研发设计更加高效与可靠。
猜你喜欢
国画家(2021年4期)2021-10-13 07:32:06
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
大电机技术(2021年2期)2021-07-21 07:28:24
东华大学学报(自然科学版)(2018年1期)2018-06-29 03:35:00
中学生英语(2017年6期)2017-07-31 21:28:55
海洋信息技术与应用(2017年2期)2017-06-21 19:51:29
青年歌声(2017年6期)2017-03-13 00:57:56
青少年科技博览(中学版)(2017年1期)2017-03-02 06:19:16
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:07
现代企业(2015年6期)2015-02-28 18:51:56