
一种位置信号机械控制机构的设计研究
2024-01-20 17:14胡延丽郑楠李慧祁静郭志勇
电子产品世界 2023年11期
关键词:触点
胡延丽 郑楠 李慧 祁静 郭志勇

关键词:机械控制机构;极限行程;触点
中图分类号:TH122 文献标识码:A
0引言
随着现代汽车工业的发展和人们对汽车越来越高的要求,自动变速器在国产汽车上得到越来越多的应用,而变矩器是自动变速器的重要组成部分,变矩器在汽车上具有传递转矩、变矩、变速和离合的作用。自动变速器的传动效率主要取决于变矩器的结构和性能,虽然变矩器性能优越,但缺陷是油耗大、效率低,为了降低装有变矩器的汽车的油耗,可采用带有机械控制机构的变矩器。机械控制机构是一种利用外力作用实现信号传输的制动控制机构,主要应用在车辆油门踏板下方的机械控制机构,其功能是为变矩器的电控单元提供油门极限位置信号,从而调整变矩器的解闭锁状态;为变矩器提供一个变距保护的信号,进而平衡车辆动力输出和油耗。
机械控制机构可实现位置的限定,是变矩器上一个不可或缺的部件,给变矩器提供信号并对其进行控制。机械控制机构是根据踩踏油门的力量,为变矩器提供触点及极限位置信号,控制、保护变矩器。如果没有机械控制机构的保护,变矩器将进行无限制的加速加矩从而导致车辆故障,因此机械控制机构对汽车变矩器具有重要作用,每台变矩器都必须配备机械控制机构。
机械控制机构可在无电源的情况下实现其功能。市场上大部分压力控制机构需要有外接电源以驱动控制机构来传输开闭锁信号,此控制机构安装在车辆脚踏板下方,在设计结构空间狭小且无电源驱动的情况下,利用纯机械的功能结构,通过外界力(脚踏力)的作用,驱动并实现控制机构的解闭锁功能,并为相关动力装置提供行程和极限位置信号。因此在特定的无电源并且有机械力的作用情况下,可采用机械控制机构。
1机械控制机构的工作原理
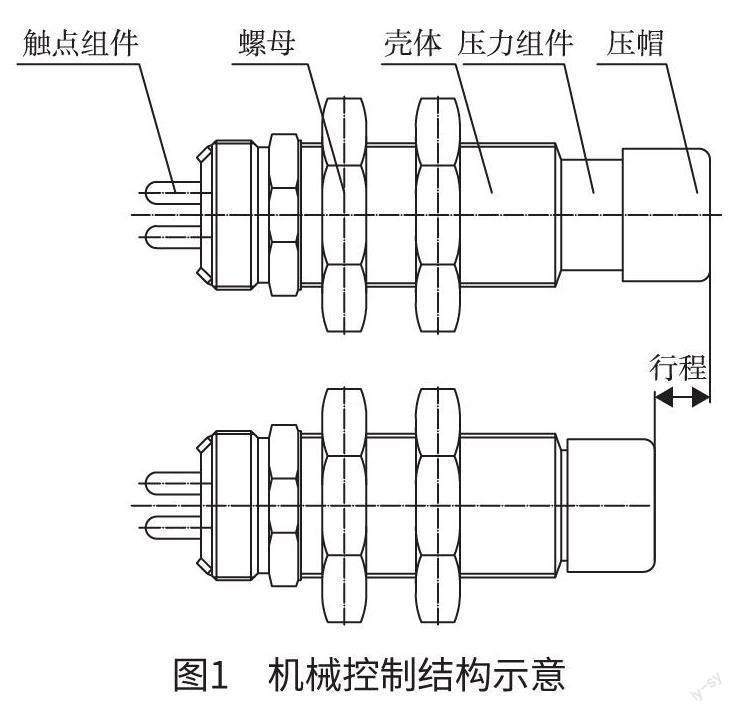
机械控制机构的主體结构由触点组件、壳体、螺母、压力组件和压帽组成。其原理主要是在一定的机械力作用下,触点组件开始启动,到达触点位置时,机械控制机构导通,继续增加作用力,压力组件开始运动,到达指定的极限位置,通过机械结构卡住,停止运动。其实质是利用多种刚度弹簧的联合作用,使机械控制机构的触点组件连接和断开,输出机械控制机构信号,并提供行程和极限位置的信号,实现机械控制机构的解闭锁功能,从而调整车辆上变矩器的解闭锁状态。机械控制结构示意如图1所示。
2机械控制机构的机械性能参数
机械控制机构在离合器下进行应用,需要反复操作,在使用过程中也是易损件,因此在设计中需要优化结构和工艺以提高其寿命至万次以上。目前本研究的机械控制机构寿命设计为1万次,机械控制机构的极限行程可根据变矩器的高度进行设定,不同应用场合对应的行程不同,一般不大于20 mm;机械控制机构在整个行程过程中的某一点处导通,为保证机械控制机构信号输出的可靠性,需要较大的操控力,因此在实际工况下,机械控制机构设计要求较高,可按照最大的参数进行设计,再逐步优化。由于机械控制机构在位置信号传递过程中会产生电信号,因此在设计中还需满足绝缘要求。
3机械控制机构的功能结构设计
3.1机械控制机构的功能结构
根据机械控制机构的工作原理对机械控制机构的功能结构进行设计,依据性能要求、产品的力与位移关系来确定弹簧的组合形式,其功能设计采用双弹簧并联+单弹簧串联的形式。本设计运用两个完全相同的较大刚度的小弹簧并联后,再与一个刚度较小的大弹簧进行串联使用,并联小弹簧实现较大触点力、较小位移的触点导通,串联大弹簧实现行程和极限位置的输出,如图2所示。
3.2机械控制机构的运动原理
为了在整机受力后能够按照技术性能要求的位移和力值进行运动,设计时要首先考虑各个弹簧的运动情况,再进行弹簧刚度分配和弹簧刚度的设计。如果弹簧整体同时运动,由于串并联弹簧的功能结构设计以及弹簧制造工艺,整体刚度理论值与实际值有偏差,因此本功能结构设计采取小弹簧先运动、大弹簧后运动的模式。小弹簧先运动以满足整机的触点和位移要求,小弹簧触点启动后,利用机械结构限制其运动,之后随着力值逐渐增大,大弹簧进行运动,完成机械控制机构的整体行程位移和极限位置的要求。
4机械控制机构的弹簧设计
机械控制机构是通过两种弹簧相互作用实现其功能的,串联大弹簧是根据机械控制机构整机极限位置的总行程要求而确定的,为保证机械控制机构信号输出的可靠性,大弹簧需要有较大的行程操控力,根据设计要求确定操纵起始力、最大工作载荷、工作行程以及最大行程。并联小弹簧是用来实现触点的开启和断开,小弹簧的行程较小,触点力较大,需要确定其触点载荷。
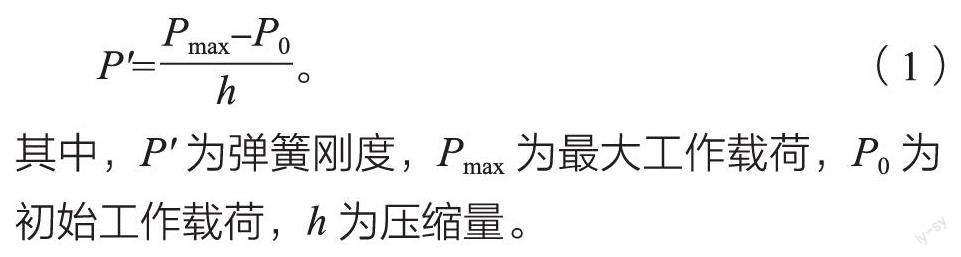
对整机弹簧刚度进行合理分配,确定弹簧刚度。弹簧参数的选取及弹簧刚度计算公式如下:
根据式(1),分别确定串并联弹簧的刚度,通过机械控制机构性能指标中的触点行程和最大行程要求,进而确定触点载荷和最大载荷、大弹簧初始载荷,通过计算,确定串并联弹簧的刚度。
根据机械控制机构整机性能要求及弹簧刚度,按照弹簧材料的要求和属性,再根据材料性能的相关标准,选取材料为碳素弹簧钢丝65Mn,其强度高、性能好,适用于机械弹簧。
弹簧旋绕比一般初定为5~8,其计算公式如下:
C=D/d。 (2)
其中,C为旋绕比,D为弹簧外径,d为弹簧线径。
根据旋绕比,初选弹簧线径、弹簧外径,并根据整机结构尺寸,确定自由长度,弹簧的端部结构形式均为两端并紧并磨平1圈。
弹簧的有效圈数计算公式如下:
弹簧材料为碳素弹簧钢丝,经淬火等多重工艺处理,提高材料的许用应力,并不断改变弹簧的基本参数,最终满足复合弹簧的刚性、稳定性和疲劳要求。
5验证
经加工装配后形成整机设备,用专用设备对整机性能进行验证,根据触点导通和行程进行整机的测试,精确地测量导通位置位移和力的关系。如图3所示,经测试后机械控制机构位移与力的关系满足了机械控制机构的性能要求。
6结论
机械控制机构的机械设计基于产品的性能要求,充分考虑了机械控制机构的使用功能、绝缘性能、设备稳定性和疲劳寿命。结合弹簧的理论计算来合理设计机械控制机构,使其在较小的空间设计范围内达到性能指标。本文为未来机械控制机构的设计提供了理论依据和实践经验,以期推动机械控制机构设计领域的发展。
猜你喜欢
武汉广播影视(2022年6期)2022-12-28
中国新技术新产品(2022年11期)2022-09-14
商业2.0-市场与监管(2021年1期)2021-09-10
计算机测量与控制(2021年4期)2021-05-07
电工材料(2021年1期)2021-03-06
汽车维护与修理(2021年2期)2021-02-03
军民两用技术与产品(2020年8期)2020-09-07
山东工业技术(2019年13期)2019-05-30
机电工程技术(2018年4期)2018-05-05
机电信息(2015年6期)2015-02-27
