
基于GIS和VR技术的输电线路巡线可视化研究及应用
2024-01-19 08:16:56杨剑锋杨建国马玉慧闫欢
电测与仪表 2024年1期
杨剑锋,杨建国,马玉慧,闫欢
(1.国网宁夏电力有限公司, 银川 750001; 2.神华国能宁夏煤电有限公司鸳鸯湖电厂, 银川 750410; 3.国网宁夏电力有限公司检修公司, 银川 750001)
0 引 言
输电线路传输距离长、覆盖范围广,易受到自然环境和人为因素的影响,可能导致倒塔倒塔、断股、磨损等。为保证输电线路运行的稳定和安全。需要定期进行输电线路巡检[1]。当前,地理信息系统GIS(Geographic Information System)逐渐应用于电力线检查系统,但是大多数电力系统都建立在二维GIS平台上。 在输电线路的实际运行、维护和安全评估中,二维GIS电力信息系统将无法满足更深入的应用需求[2]。因此,需要建立更直观、更真实的电力巡检可视化平台。如果将虚拟现实技术VR(Virtual Reality)与GIS结合使用,则可以相互学习并弥补各自的不足。一方面,VR技术可以大大改善GIS技术的建模工作,提高GIS技术的可视化能力。另一方面,GIS可以为虚拟现实技术提供双向查询、空间分析、决策辅助等功能。因此,研究基于GIS和VR技术的输电线路巡逻可视化系统具有重要的现实意义。
目前,国内外越来越多学者开始将地理信息技术应用到电力设备管理和施工中。然而,大多数停留在单一数据源的辅助业务功能的分析以及构建业务运营平台,对基于GIS技术和VR技的输电线路巡检可视化缺乏深入研究。在文献[3]中,提出了一种基于3D GIS的辅助施工测量系统,用于输电线路工程。该系统使用高分辨率的遥感和DEM数据构建三维虚拟环境,支持输电线路沿线施工环境探索,并进行施工道路和索道的规划管理。实践证明,该系统是可行的。在文献[4]中,提出了基于3D GIS的电力线巡检管理的施工方法和应用流程。该技术的应用可以为输电线路巡检提供科学直观的数字支持,为电网提供安全运行和高效管理服务。在文献[5]中,考虑将3D GIS技术应用于输电线路可视化平台,结合数字高程模型、输电设备三维模型等,实现输电线路可视化平台的维护和查询。在文献[6]中,通过GIS和VR技术应用,结合了某地区电力管道管理的特点和要求,提出了一种GIS技术与VR技术相结合的电力管道可视化管理系统,通过实际应用证明了该系统是可行的。这些研究为基于GIS和VR技术的输电线路巡检可视化研究提供了理论基础。
在上述研究的基础上,结合GIS技术和VR技术的优势,提出一种基于GIS技术和VR技术的输电线路巡检可视化系统,主要研究了输电线路部件的故障检测方法。利用无人机采集输电线路图像为主,建立故障组件的故障识别与检测网络模型,对部件进行智能检测。通过实验对模型的准确性进行验证。最后,使用GIS和VR开发工具实现该系统。
1 系统原理
将GIS技术和VR技术应用于输电线路巡检可视化中,可以有效地克服传统输电线路管理的不足。GIS是综合各种统计信息和地理空间特征的信息系统[7]。具有强大的信息管理功能和空间分析功能。GIS技术不仅提供输电线路数据的图形化管理,并能完成输电线路网络分析,对输电线路巡检起到辅助作用。VR技术是在计算机网络、人机交互、立体显示等技术基础上发展起来的新型技术。借助虚拟现实技术,可以将输电线路的周边环境、交叉关系和空间布局真实、准确地向客户呈现,给客户带来真实的体验。为了减少日常开销,将GIS和VR系统的功能独立起来。对于需要交互的功能,开发一套交互接口,通过网络方式传输数据和控制指令。图1所示基于GIS技术和VR技术的输电线路巡检可视化系统结构。
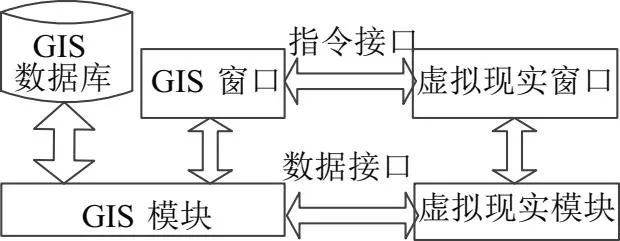
图1 系统结构
2 故障检测网络模型
2.1 识别和检测网络架构
2016年,Shaoqing Ren等人在Fast R-CNN网络中加入区域建议网络,候选框的特征提取采用深度学习网络,从而得到一种快速的RCNN目标检测方法[8]。该方法利用卷积神经网络代替选择性搜索算法生成候选集。
在卷积神经网络的浅层输出端定义RPN,对损失函数进行约束,并提取有效的目标检测候选区域。图2所示基于深度学习的无人机图像采集输电线路部件识别和诊断网络。它由数据集、特征提取、区域建议网络和分类微调网络组成。
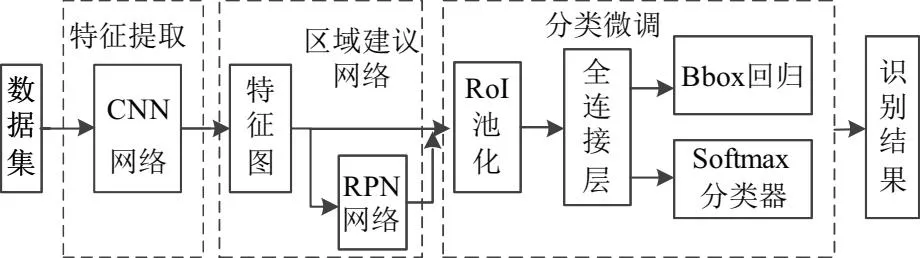
图2 识别网络结构
ZF或VGG16进行卷积提取特征,同时将特征图传输到区域建议网络和RPN层[9]。区域建议网络处理特征图得到区域建议窗口,将结果传递到ROI池化层。ROI池化层主要是找到建议窗口对应位置进行归一化,准备进行全连接,之后采用bbox回归确定目标的位置,采用Softmax分类器对目标分类。最大概率值作为识别结果。
2.2 特征提取
文中选择两个网络(ZFNet和VGGNet)进行了特征提取试验。
ZFNet网络:ZFNet网络是在Alex网络结构基础上做了微调,并获得与Alex网络相同的感知野[10]。
VGGNet网络:VGGNet网络具有深度为11层~19层的卷积神经网络[11]。VGG16网络由13个卷积层、5个池化层和3个全连接层组成。文中只利用VGG16网络的前13个卷积层和5个池化层对输电线路的图像进行特征提取。文中的激活函数均选择ReLU函数,池化类型均为最大池化。文中选择16层VGG网络对特征进行提取。
2.3 区域建议网络
使用特征提取网络提取特征图后,在RPN层和ROI池化层同时共享特征图[12]。其中,RPN网络主要是从特征图中提取目标候选区域并生成建议窗口。与选择性搜索相比,RPN网络可以更快地提取候选区域。这是因为RPN网络能够在与整个检测网络共享特征,所以提取候选区域的时间大大减少。图3所示RPN网络的基本结构。
RPN的核心思想是利用神经网络生成检测区域,RPN中的每个滑动将生成9个候选区域[13]。在RPN网络训练中,把anchor划分正样本和负样本。一般采用设定和标定区域重叠率的阈值来确定正样本和负样本,设正、负样本阈值分别为0.7和0.3。

图3 RPN网络结构
RPN网络训练损失函数包括位置回归和分类误差,如式(1)所示[14]:
(1)

分类损失函数Lcls为[15]:
(2)
回归损失函数Lreg为:
Lreg(t,t*)=R(t-t*)
(3)
式中R为鲁棒的损失函数smoothL1,即:
(4)
smoothL1损失函数使网络在训练中更为稳定。候选区域的位置信息如式(5)和式(6)所示[16]:
(5)
tw=log(w/wa),th=log(h/ha)
(6)
式中x、y、w、h分别为真实目标中心坐标和宽高值;xa、ya、wa、ha分别为前景anchor中心坐标和宽高值。
2.4 分类位置精修
主要由ROI池化层、全连接层、类别判断层(softmax分类)和位置精修层(Bbox回归)组成分类位置精修网络[17]。该层的输入包含两部分:RPN网络输出建议窗口和提取网络提取特征图。最后,通过精修网络输出目标类别判断和位置信息。如图4所示。
ROI池化层主要是找到建议窗口对应位置进行归一化,准备进行全连接,之后采用bbox回归确定目标的位置,Softmax分类器用于对目标进行分类。
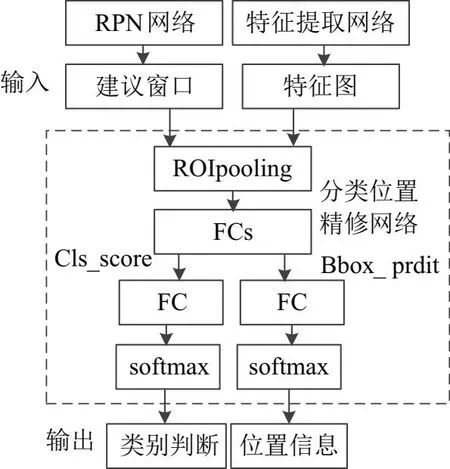
图4 分类位置精修网络
文中有四种类型的故障,输出为4+1维(背景为1)。通过类别决策层可以找到与识别目标相对应的5个类别的概率。假设ROI概率预测为:p=(p0,p1,…,p5),对于特定的决策类别u,损失函数为[18]:
Lcls(p,u)=-logPu
(7)

360度全景技术近年来发展迅速,本文对制作全景场景的全景图片的拍摄方法进行详细介绍,并对拍摄后的图片的处理方法进行深入研究。经过处理的图片没有拍摄时候辅助工具的痕迹,可以直接应用在高校制作全景漫游系统时的全景场景制作中,节约了图片处理的时间,加快了全景场景的制作过程,具有一定的研究意义。■
(8)
多任务损失函数通过对类别判断和位置精修损失函数进行加权得到,如式(9)所示[20]:
(9)
式中Lcls(p,u)、Lloc(tu,v)分别为类别判断和位置精修的损失函数;λ为权重,主要控制两个损失函数的比例。
3 故障检测分析
3.1 故障识别
在实验中,选择了两个特征提取网络ZFNet和VGG16,分别进行迭代训练。包括四个故障类别:均压环锈蚀变形、防振锤脱落、绝缘子外表破损和塔架锈蚀弯曲。每个故障类别500张,共2 000张。实验结果见表1。
从表1中可以看出,特征提取网络VGG16的平均识别率高于ZF。同时,对于同一特征提取网络,经过不同的迭代后,网络的最终平均识别率是不同的。迭代次数越多,识别率越高。VGG16特征提取网络在经过40万次迭代后识别率最高,达到94.7%,最终选择了该模型。
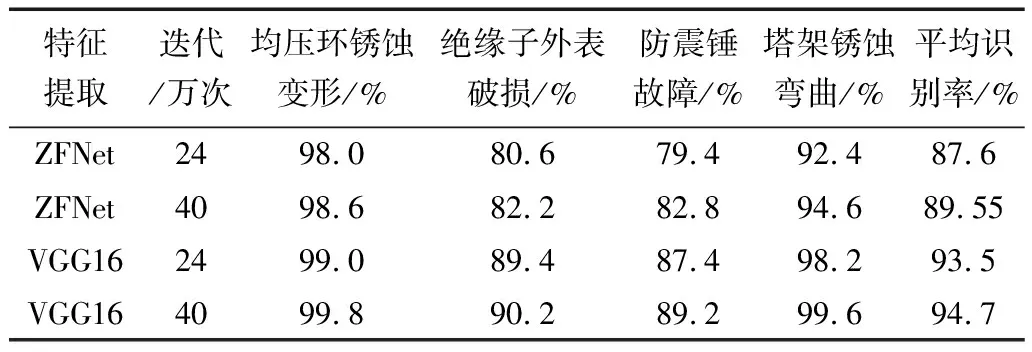
表1 输电线路故障识别结果
3.2 背景影响
无人机采集的图像背景不同,对不同背景进行测试。文中选取拍摄背景为湖泊、雪地、居住区、树林、农田的图片,分别选择均压环锈蚀变形、防振锤脱落、绝缘子外表破损和塔架锈蚀弯曲。每个背景20张输电线路部件数据,总共测试了400张输电线路部件图像。测试结果如表2所示。

表2 不同背景的测试结果
由表2可知,平均识别率最高达到100%,最低的达到95%。最高的农田背景,最低的湖泊和雪地。在5种不同背景下的平均识别率为97.5%,都高于平均识别率94.7%。因此,文中提出的输电线路故障检测模型具有较强的鲁棒性。
3.3 光照影响
由于输电线路检测时间长和天气变化大,不同光强对无人机采集的部件图像的影响不同。各部件分别选取了20张夏季中午拍摄的照片,采用不同亮度和不同对比度对识别率的影响进行分析,4种亮度和4种对比度。总共1280张测试图片,部分如图5所示。
从表3中可以看出,当亮度和对比度分别为20和1.0时,检测到的图像具有最高的识别率,最终的识别率达到97.5%。 当亮度和对比度为 -20和0.6时,识别率最低。结果是72.5%。但是,当对比度系数为[0.8,1.2]而亮度系数为[ -10,20]时,识别率变化不大,平均识别率达到94.03%。
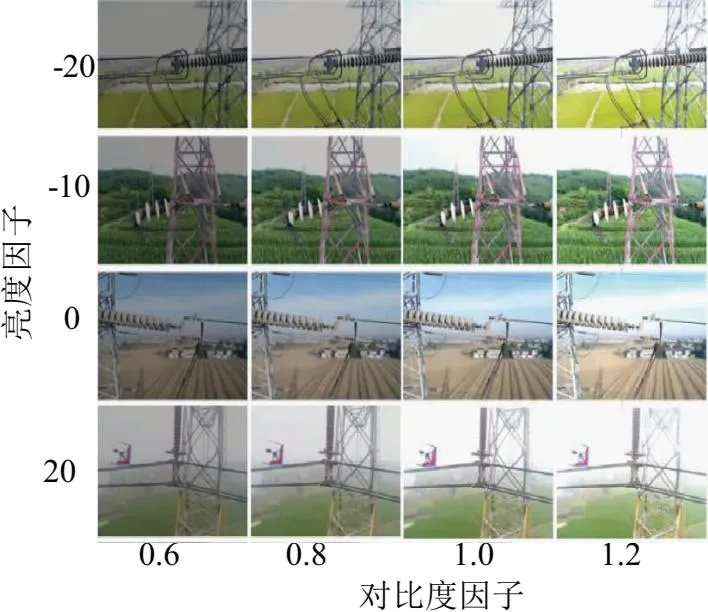
图5 模拟光照数据集
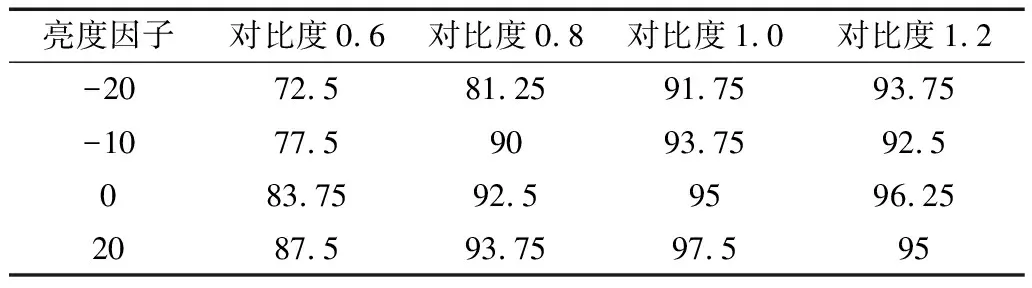
表3 在不同光照下的识别率
所以文中检测网络模型能够正确识别和检测早晨、下午、晴天、阴天等不同亮度下的图像。对各种光强度都具有较强的鲁棒性。
4 基于GIS和VR技术的输电线路巡线
利用电网GIS图,为输电线路巡视提供图形数据支撑,无人机拍摄的多角度图像可以准确地对杆塔和线路进行建模。输电线路部件故障检测的重点是对无人机拍摄图片进行自动检测,输入到三维模型中,为巡线提供重点巡视区域。模型详细信息根据捕获图像的分辨率按比例放大或缩小。将杆塔、线路三维模型导入VR场景进行三维仿真。系统框图如图6所示。
实现了输电线路的可视化,通过VR感知设备进入三维场景,可以通过按键进行传输、地面和空中巡检切换等,地面巡线见图7。

图7 地面巡线
可以通过切换到地面,在杆塔周围进行巡视,通过杆塔现场实时监控摄像头,可以切换到摄像头的实时影像,并观察杆塔现场的当前状况。空中巡线见图8。通过按键切换到无人机巡检,通过杆塔现场实时监控摄像头,可以全方位地看到线路情况,完成输电线路巡检。

图8 空中巡检
文中提出系统的建立和应用,可以通过构建输电线路基础数据使电力公司的相关管理人员可以充分了解现有输电线路的使用情况、未来的输电线路建设规划以及所有输电线路的具体走向,充分利用现有资源。另一方面该系统的应用为输电线路巡线提供了准确的故障位置信息。但是目前该系统只能通过输电线路杆塔部件外观是否完好来判断故障,后续还将对各部件故障精细化辨识进行研究。
5 结束语
文中在分析GIS技术和VR技术的基础上,提出了一种基于GIS和VR的输电线路可视化巡检系统,主要研究输电线路部件的故障检测方法。通过实验验证了模型的准确性。结果表明,该模型能够有效地检测出输电线路中的常见故障部件。使用GIS和VR开发工具进行了系统实现,并展示了实际效果图。考虑到当前的实验设备和数据规模,文中还处于起步阶段。在此基础上,进一步改进和完善基于GIS和VR技术的输电线路巡检可视化系统。以适应未来不断变化的应用环境。
猜你喜欢
计算机工程(2020年3期)2020-03-19 12:24:50
中国听力语言康复科学杂志(2019年3期)2019-06-24 09:51:20
电子制作(2018年19期)2018-11-14 02:37:08
制造技术与机床(2018年9期)2018-09-19 06:48:16
中国交通信息化(2018年3期)2018-06-13 03:27:58
海外华文教育(2017年6期)2017-08-07 03:11:00
自动化学报(2017年11期)2017-04-04 02:52:58
中国交通信息化(2016年2期)2016-06-06 07:28:02
水电站机电技术(2016年1期)2016-02-28 14:21:50
噪声与振动控制(2015年4期)2015-01-01 07:08:21
