
基于RTDS的直驱风机硬件在环实验方法
2024-01-19 05:38:30何朴想郝正航杨光绕聂春芳
电子科技 2024年2期
何朴想,郝正航,陈 卓,杨光绕,聂春芳
(贵州大学 电气工程学院,贵州 贵阳 550025)
风能和太阳能在电力系统中的高渗透性导致产生了功率波动、次同步振荡、超同步振荡甚至高频振荡等问题,这些稳定性问题与可再生系统的控制策略密切相关。因此,增强风电机组的安全性、稳定性以及并网性具有重要意义。研究人员大多使用MATLAB/Simulink、PSS/E、PSCAD仿真软件对风电机组进行仿真。由于仿真非实时,因此不能与实际控制器和实时仿真器直接相连,较难模拟风力机的实际工程特性,而且对控制系统结果验证不够直观,也不能使硬件与仿真软件系统连接形成闭环。
文献[1~3]利用实时数字仿真器(Real-Time Digital Simulator,RTDS)研究风电系统的建模与控制策略。文献[4]在RTDS中搭建风电机组仿真模型,结合实际控制器搭建硬件在环(Hardware-in-the-Loop,HIL)仿真平台测试风电机组的低电压穿越特性是否满足国家标准要求。文献[5]通过搭建微网HIL仿真平台,研究双馈风电机组的稳态仿真和步进风速的动态特性,证明了半实物仿真平台可以用于研究风力发电的物理特性。文献[6~7]分别提出一种RTDS与励磁调节器构建的HIL实验仿真平台,发挥了数字仿真与工程实际设备的特点,搭建了一种接近实际工程的仿真平台,还搭建了符合实际工程情况的风电场经柔性直流输电系统并网实时仿真平台。但该研究是针对同步发电机励磁调节以及风电场经柔性直流输电系统并网实验搭建实验平台。传统风电机组HIL实验平台具有针对性和特异性,本文平台为通用风电机组HIL仿真平台,相较传统风电机组HIL平台更具通用性。但该平台控制部分具有体积大、不便携等缺点,因此需进一步完善通用风电机组HIL仿真平台。
本文利用通用风电机组HIL仿真平台搭建直驱风机HIL实验仿真,并在该实验平台研究改善风力机输出特性的优化控制。根据某2.5 MW直驱式永磁同步风力发电机组的产品参数,在RTDS中搭建了风力机的仿真模型。在理想状态下,电网电压是三相对称,但在实际运行中电网电压常为不平衡或不对称。为使风电机组稳定输出,本文采用了基于正序和负序电流解耦算法来消除负序电流以保持恒定的输出功率。最后,通过HIL实验平台验证了方法的合理性和有效性[8]。
1 直驱风机数学模型及优化控制
1.1 数学模型
在RTDS中建立直驱式PMSG(Permanent Magnet Synchronous Generator)风力发电机组的仿真模型,主要包括风速模型、风力机模型、传动系统模型、PMSG模型、变流器模型以及典型控制模型。
1.1.1 风力机模型
风力机的工作原理是将风能通过风力机的叶片被捕获转化为机械能被风力机输送[9]。风力机输送功率Pm为
(1)
其中,ρ是空气密度,单位为kg·m-3;R是风机叶轮半径,单位为m;β是风力涡轮机的叶片桨距角,单位为°;λ是叶尖速比;ω是风力机叶片的角速度,单位为rad·s-1;V是风速,单位为m·s-1。
风能利用系数为Cp反应吸收风能的效率。
(2)
式中,e为欧拉数。
由图1可知,当β恒定时,Cp仅在λ等于唯一λm时取最大值Cpmax。
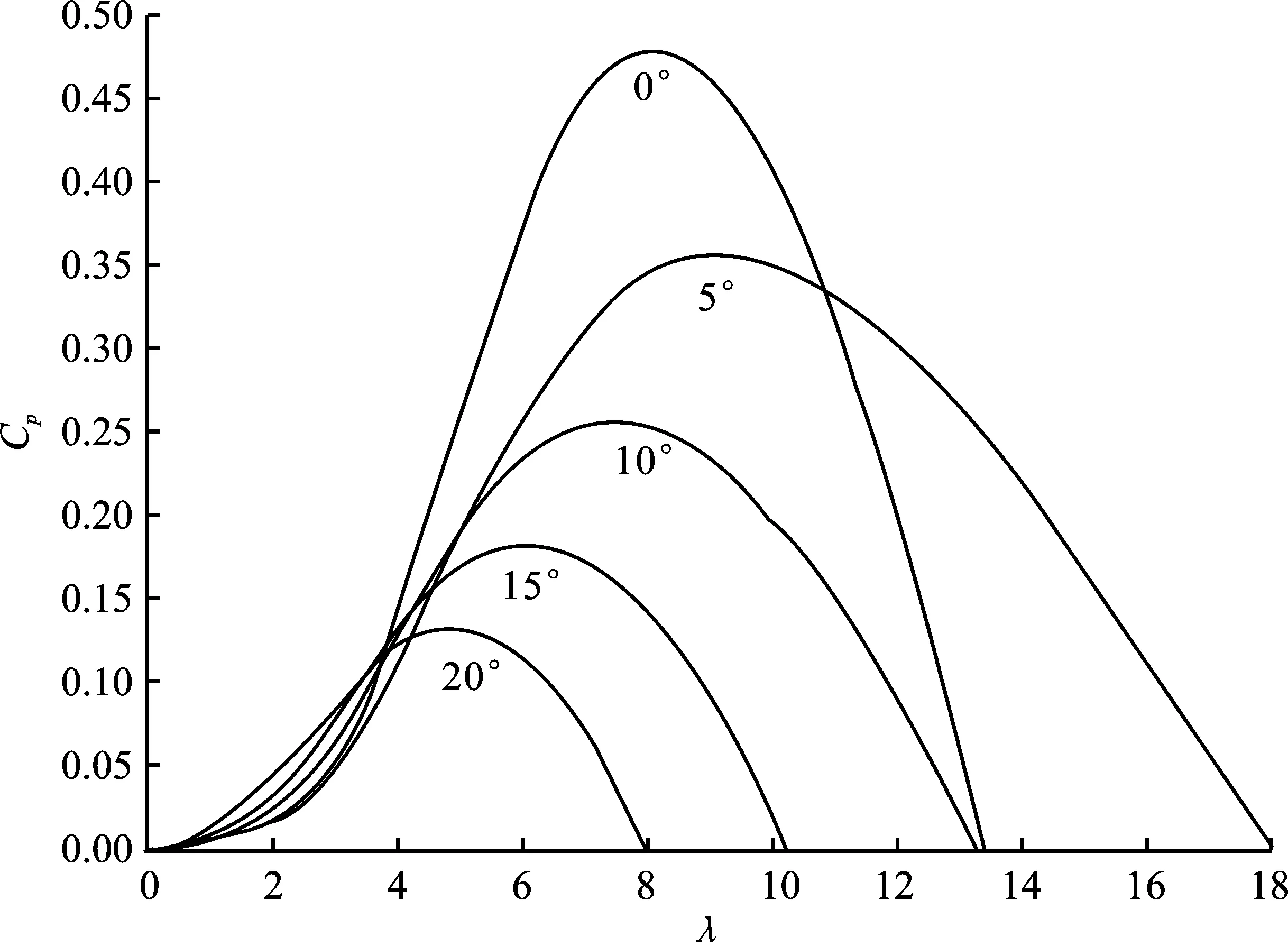
图1 风能利用系数Cp曲线Figure 1. Wind energy utilization coefficient Cp curve
变速恒频风力发电技术可以通过控制输出功率使风力机在恒定的λm下运行,从而提高风力机的风能转换效率。风力机吸收风能后产生的机械扭矩如式(3)所示。
(3)
1.1.2 PMSG模型
在d、q同步坐标系下,PMSG的微分方程模型为
(4)
其中,Φm是同步电机的固定磁链;Ld和Lq分别是同步发电机的d、q轴电感;ωs是永磁同步电机的定子磁链角速度。
1.1.3 变流器模型及控制系统
在RTDS中建立了风电机组的背靠背变流器模型,包括整流器和逆变器。RTDS仿真软件的RSCAD(Real-Time System CAD)模型库中包含了PWM(Pulse Width Modulation)变流器模型、Crowbar保护控制电路[10]和IGBT(Insulated Gate Bipolar Transistor)模型。RTDS输入输出板卡与控制器相连,实现风电机组的实时数据交换以及有功功率和无功功率的自动调节。控制器与RSCAD内控制模型配合,与发电机和电网相连,包括发电机侧变流器控制和网侧变流器控制,其重要功能包括保证供电质量、提高功率因数以及满足电网兼容标准。风电机组网侧变流器控制系统如图2(a)所示,实现了网侧变流器有功功率和无功功率的解耦控制。具有MPPT(Maximum Power Point Tracking)功能的机侧变流器控制系统如图2(b)所示[11],实现了PMSG有功功率和无功功率的解耦控制[12]。
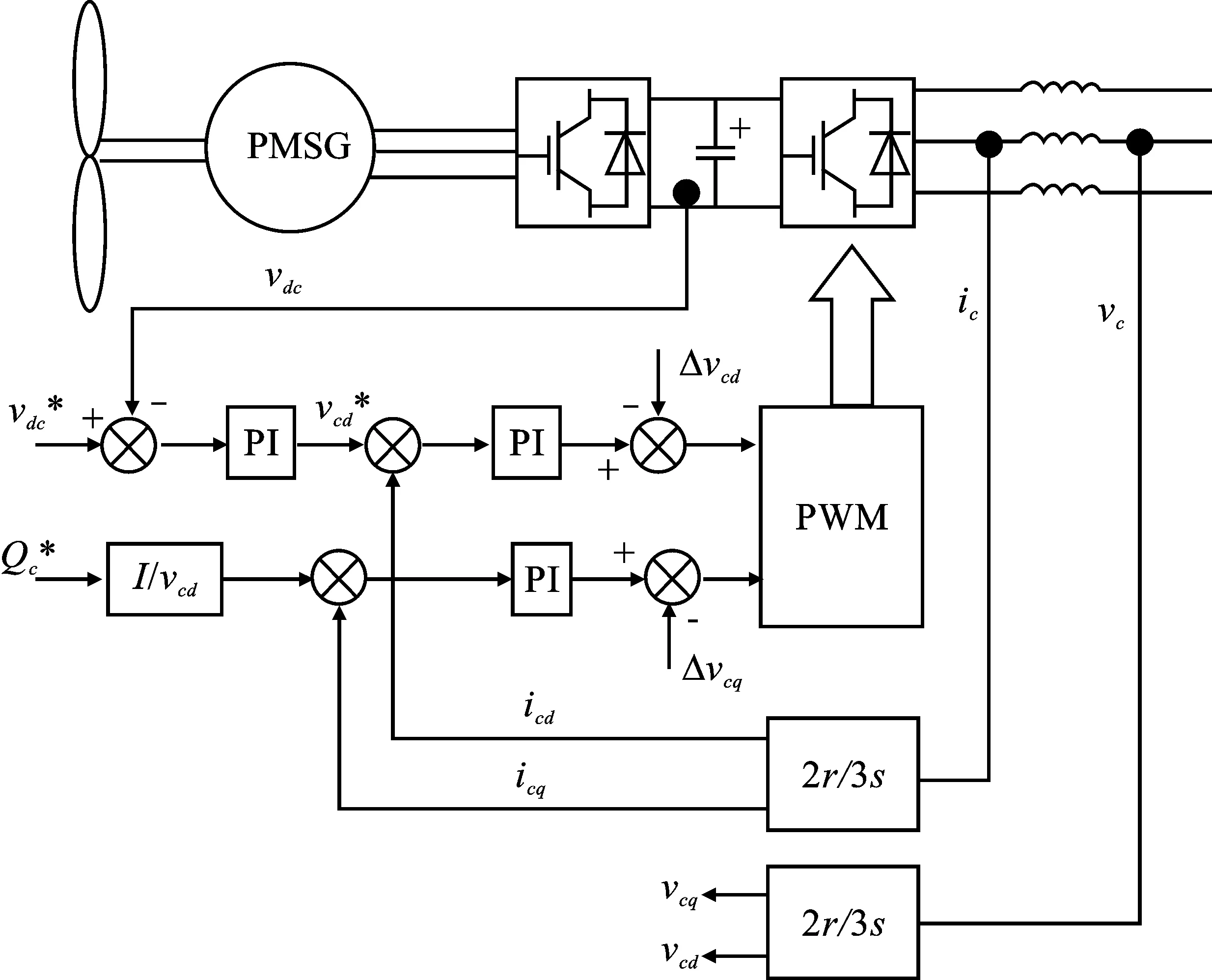
(a)
1.2 优化控制
在电网电压不平衡或不对称情况下,为了使风电机组稳定输出,采用了分别基于正序和负序电流解耦算法来消除负序电流以维持恒定的输出功率。
根据瞬时功率理论[9],网侧变流器的复功率如下所示
(5)
式中,e为欧拉数。
将式(5)以代数形式表示,分解为有功分量和无功分量,如下所示
(6)
其中
(7)
(8)
在电压不平衡的情况下,通过对称分量法将不平衡电压分解为正序与负序两部分的平衡电压[13]。本文将电网电压方向控制策略引入正序和负序网络,正序同步旋转坐标系的dP轴朝向正序电压矢量的方向,负序同步旋转坐标系的dN轴朝向负序电压矢量的方向[14]。因此,正负序同步旋转坐标系中的电网电压矢量dP-qP和dN-qN轴分量如下式所示
(9)
将式(9)代入,可得
(10)
根据式(10),P2和Q2的正序分量和负序分量的耦合,无法实现有功与无功的完全解耦[15],但可以对有功和无功功率的直流分量进行解耦控制[16]。
根据叠加原理,正序同步旋转坐标系中正序分量的电压方程、负序同步旋转坐标系中负序分量的电压方程分别为
叙事元和时空元是考察一个以叙述为主的文体重要的因素,在时代条件的作用下,修辞转向带来了儿童文学在精神、认知、审美等方面的能量,同时也促进了儿童诗学的逐步完善。
(11)
在网侧PWM变流器中,可以得到负序同步旋转坐标系中负序分量的电压方程,如下所示。
(12)
本文采用了一种在三相电网电压不平衡下保证变流器有功输出恒定的控制策略。在保持变流器有功输出功率不变的情况下,式(10)必须满足以下条件:有功功率的直流分量获得给定值P0=Pref,有功功率的两倍电网频率分量的幅值都为0(P1=0,P2=0),无功功率的直流分量接收给定值Q0=Qref。因此,矩阵方程为
(13)
正、负坐标的电流参考值如下所示。
(14)
可以看出,在输出有功功率保持不变的情况下,可以得到正序和负序的d-q轴电流参考值。将式(14)代入式(10),得
(15)
在输出有功功率保持不变以及电网不对称故障的情况下,风电机组的无功功率存在电网频率的两倍波动分量。只有在有功和无功基准值均为0时,电网无功功率两倍频波动分量的幅值为0。
本文分别采用了基于正序和负序电流解耦算法,如图3所示。
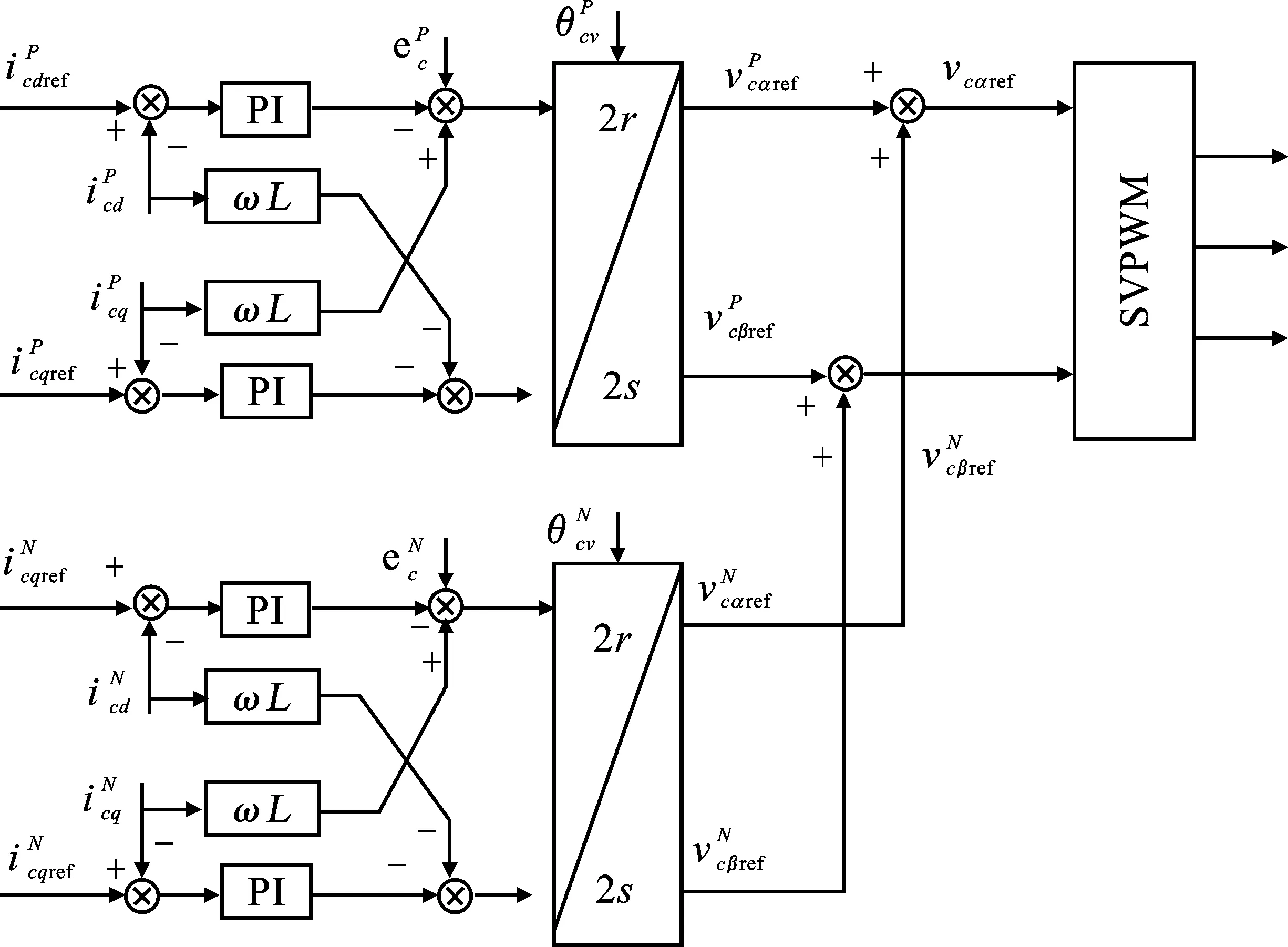
图3 正负序双电流环解耦控制策略Figure 3. Decoupling control strategy of positive and negative double current loops
在电网电压不平衡或不对称的情况下,通过抑制故障时风电机组的无功功率两倍频波动使有功和无功基准值均为0,电网无功功率两倍频波动分量的幅值为0,可达到消除负序电流使风电机组输出稳定的目的,然后通过通用风电机组HIL仿真平台建模仿真加以验证。
本文搭建通用风电机组HIL仿真平台。该平台软件系统采用RTDS,可以在RTDS中搭建自由主电路模型及控制模型。控制器由上位机、通用实时仿真器(Universal Real-Time Experimental Platform,UREP)和控制机箱组成,其使用的核心仪器是UREP。在MATLAB/Simulink中搭建控制模型然后下载到UREP中,连接控制机箱进行输出和采集信号,与RTDS中的模型搭配连接形成闭环。
2 系统平台设计
2.1 系统总体方案
在RTDS中建立的数字模型如图4虚线框中所示,包括风力机、永磁同步发电机(PMSG)、整流电路和逆变电路、风电系统并网断路器DL1、风机出口箱式变压器T1、风电场主变压器T2、传输线LN、无穷大系统。系统设计如图4所示。
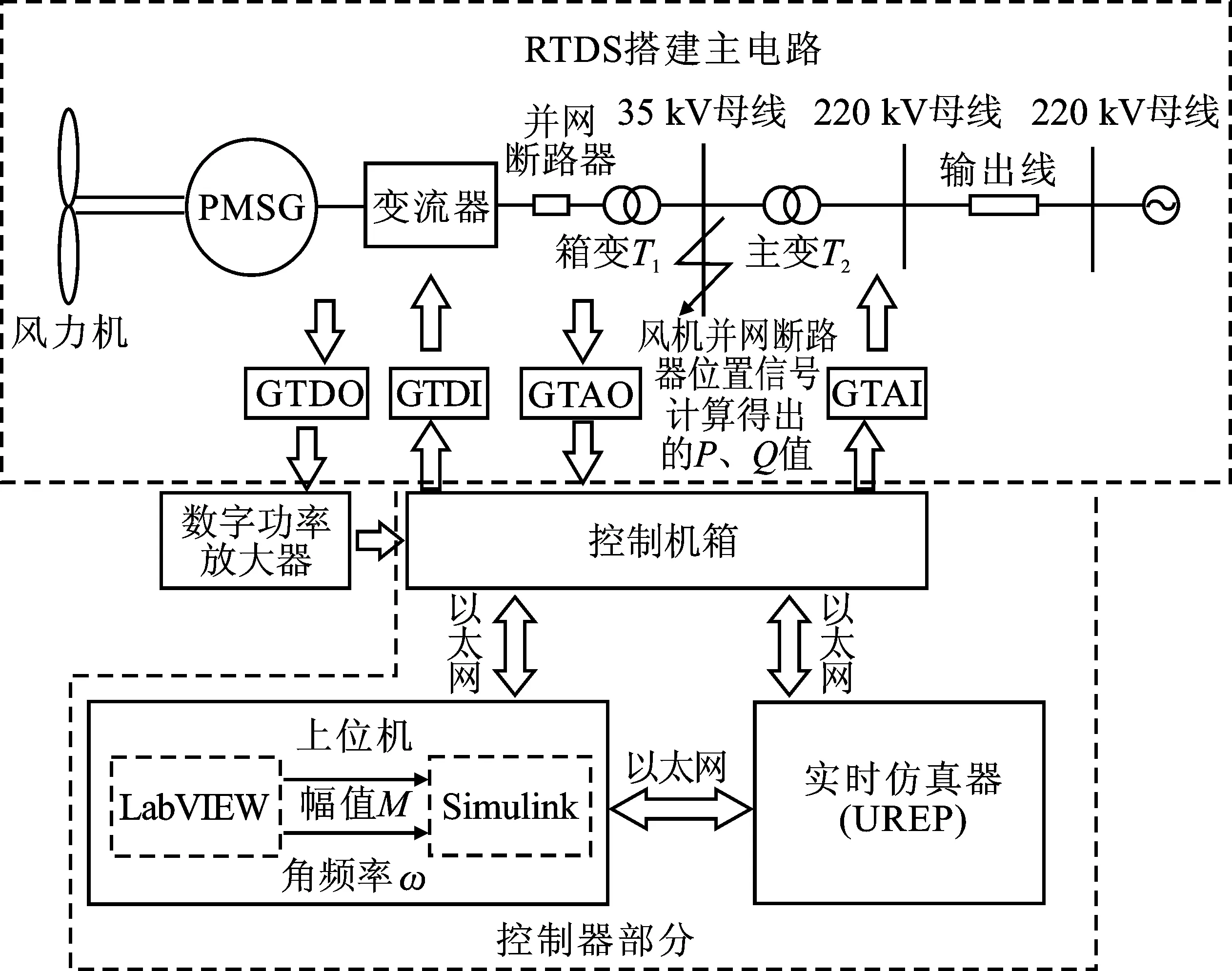
图4 直驱风机控制系统闭环实验平台Figure 4. Closed-loop experiment platform for direct drive wind turbines control system
2.2 系统硬件设计
图5为电力系统仿真实验平台的搭建方案,该平台主要包括RTDS、数字功率放大器和控制器3部分。
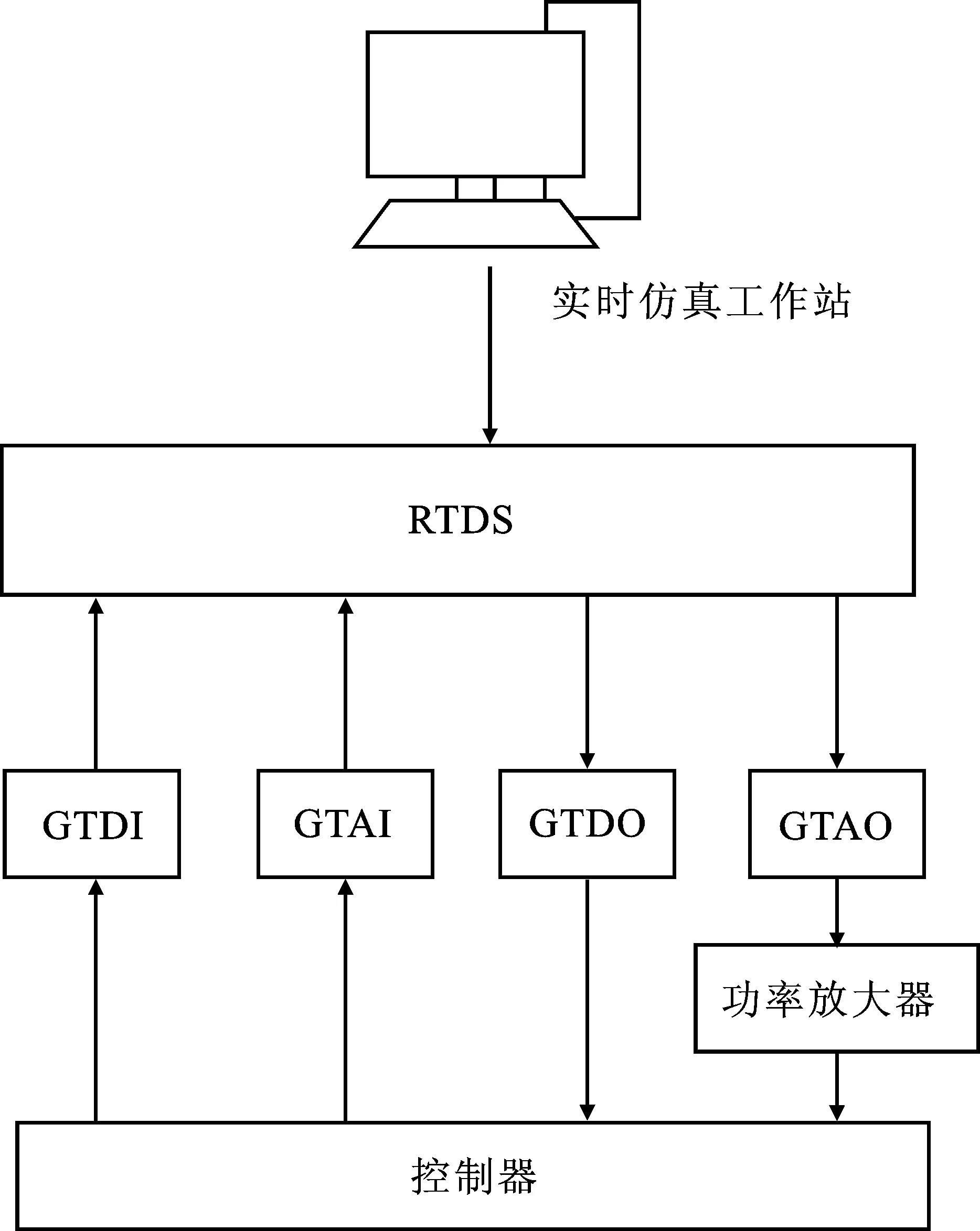
图5 电力系统仿真平台的搭建方案Figure 5. Construction scheme of power system simulation platform
在图5中,实时仿真工作站是实验过程中的人机界面、仿真试验的操作平台以及运行监视平台。
RTDS对直驱风机发电并网整个系统仿真模拟电力系统实时动态变化。由于计算结果的实时性,RTDS可与电气设备直接连接进行实时测试,以验证设备、保护及其控制系统能否满足实际电网运行的要求。数字功率放大器将RTDS的板卡GTAO输出的±10 V电压信号按照标准的输出等级(100 V,5 A)进行放大,然后输出到控制机箱的ADC(Analog-to-Digital Converter)采样接口。通过RTDS与控制器之间的信息反馈开展直驱风机硬件在环实验,作为一次系统的主电路模型模拟直驱风机运行电路,二次系统的自动化装置可以运行逻辑控制算法[19]。该HIL仿真平台如图6所示。

图6 HIL仿真平台Figure 6. HIL simulation platform
2.3 系统软件模型搭建
在电力系统仿真研究时,通常使用单机无穷大系统来简化模型。相较于整个无限大系统而言,发电机的动态过程对整个系统的影响较小,可认为该无限大系统电压和频率恒定不变[20]。实验建模只需在Draft模块中搭建主电路模型(发电机模块、整流和逆变模块、I/O接口配置、输电线路和电压源模块)。模型搭建完成后,可以方便地调控被仿真的电力系统、控制仿真运行及分析仿真结果。模型搭建完成后可根据实验要求与仿真需要自行修改。Runtime模块用于搭建用户交互界面,通过该模块可以控制RTDS的运行。用户可以在Runtime模块控制台上生成虚拟表盘、开关、按钮及滑杆等控制元件,当仿真开始后可以通过控制台对仿真模型进行实时监测或交互,在Runtime模块中观察所有的信号数据。在MATLAB/Simulink中搭建控制部分,搭建完成后下载到UREP中,在LabVIEW显示界面可以监测控制部分输出和采集的信号。
3 实验验证
模型参数如表1所示,RTDS板卡性能参数如表2所示。本文对在电网电压不平衡或不对称的情况下传统控制策略和优化控制进行比较,在电网正常运行情况下,机组运行于额定功率状态,即P=2.5 MW,Q=0 MVar。
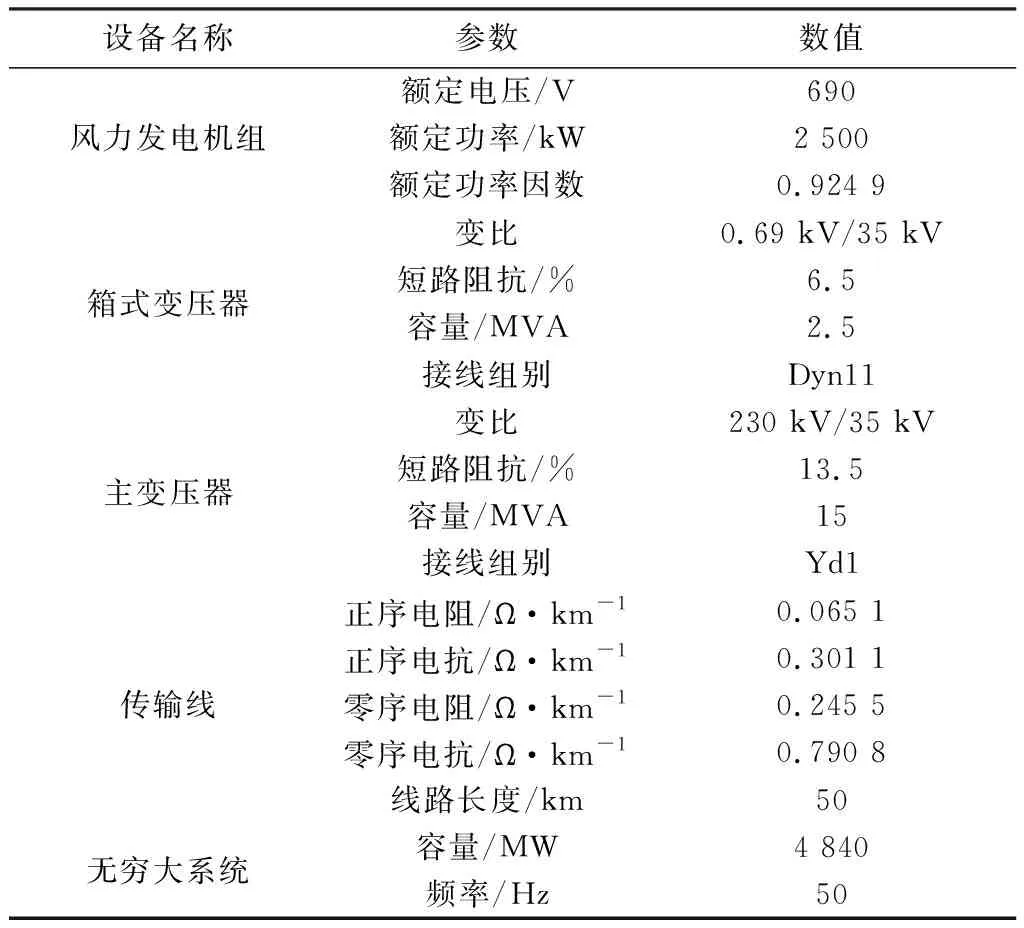
表1 仿真模型参数Table 1. Simulation model parameters
为了验证优化控制策略的有效性,图7和图8分别显示了在没有优化控制策略的情况下对a相电压降至50%和降至20%的控制效果[21]。依次测量网侧电压ua、ub、uc,逆变器输入电网的有功功率P和无功功率Q(P、Q均用标幺值p.u.表示)及直流母线电压udc。

图7 a相电压下降到50%时传统控制的输出效果Figure 7. The output effect of conventional control when the a-phase voltage drops to 50%
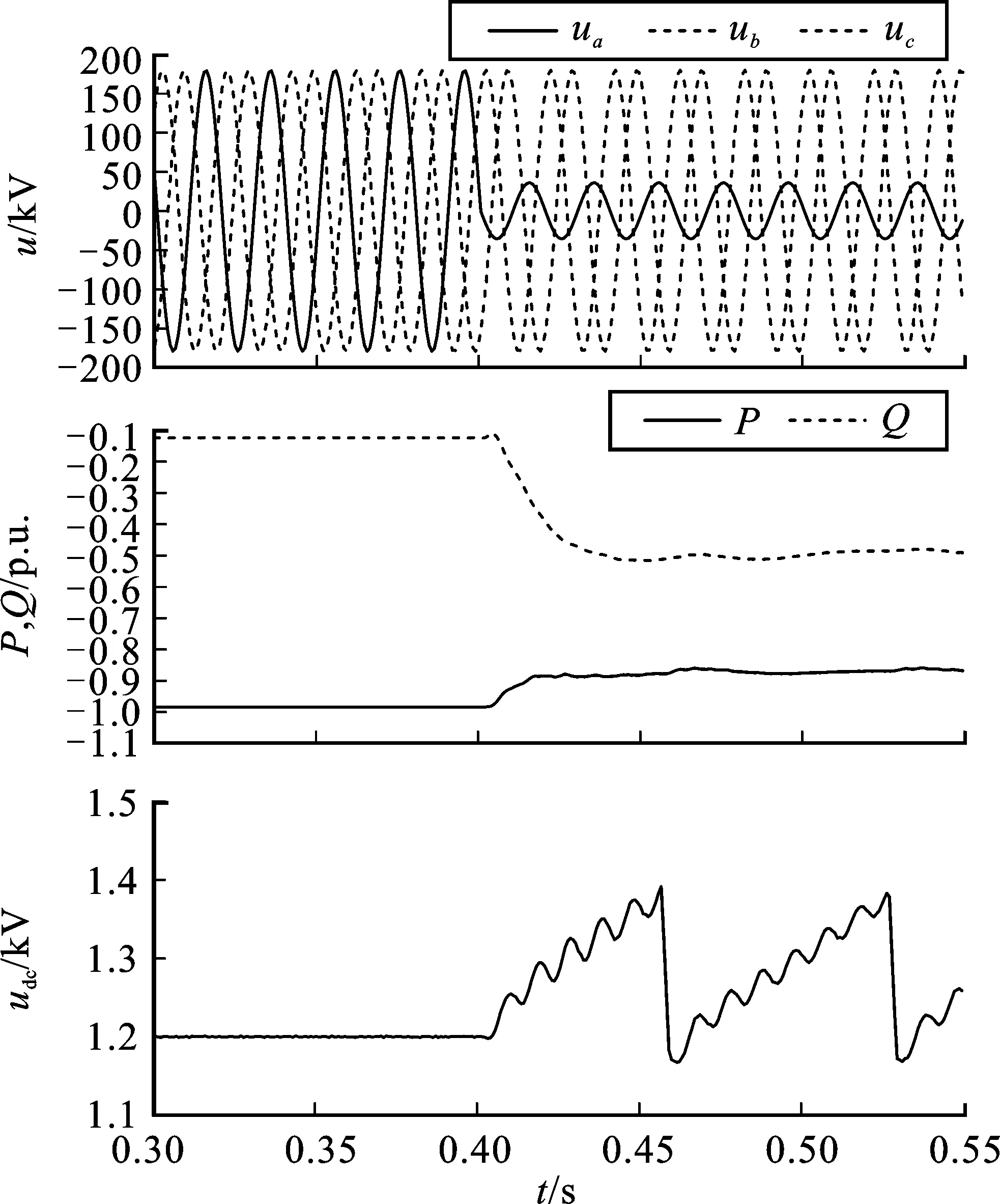
图8 a相电压下降到20%时传统控制的输出效果Figure 8. The output effect of conventional control when the a-phase voltage drops to 20%
在电网电压不平衡或不对称的情况下,采用优化控制策略对a相电压降至50%和降至20%的控制效果[21]如图9和图10所示。由图9和图10可知,控制效果得到了显著改善。
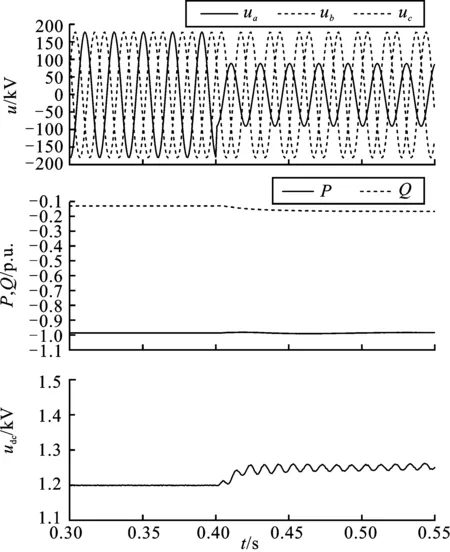
图9 a相电压下降到50%时优化控制去耦控制的输出效果Figure 9. The output effect of decoupling control is optimized when the a-phase voltage drops to 50%

图10 a相电压下降到20%时优化控制去耦控制的输出效果Figure 10. The output effect of decoupling control is optimized when the a-phase voltage drops to 20%
4 结束语
本文利用通用风电机组HIL仿真平台搭建直驱风机HIL实验仿真,并在该实验平台研究改善风力机输出特性的优化控制。根据某2.5 MW直驱式永磁同步风力发电机组的产品参数,在RTDS中搭建了风力机的仿真模型。在电网电压不平衡或不对称的情况下,为使风电机组稳定输出,采用了分别基于正序和负序电流解耦算法来消除负序电流以保持输出功率恒定,风电机组有功功率输出不变,风电机组并网的适应性显著提高。最后通过仿真验证了该方法的合理性和有效性。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:36
西南交通大学学报(2018年6期)2018-12-18 02:22:18
测控技术(2018年5期)2018-12-09 09:04:38
测控技术(2018年10期)2018-11-25 09:35:38
电测与仪表(2016年8期)2016-04-15 00:30:16
通信电源技术(2016年4期)2016-04-04 02:57:12
电测与仪表(2015年16期)2015-04-12 00:44:34
振动工程学报(2015年1期)2015-03-01 01:15:46
太阳能(2015年6期)2015-02-28 17:09:35
电测与仪表(2014年19期)2014-04-04 12:06:22
