
双馈风电机组次同步振荡自主学习控制方法设计
2024-01-19 03:08李宗泽胡桂军
环境技术 2023年12期
李宗泽,胡桂军
(河北新天科创新能源技术有限公司,张家口 075000)
引言
国内的用电量每年大幅度攀升,为了提高电力功率的开发,增加电力传输的距离,近年来逐渐开始实行风电并网,不仅能大大提高输电能力,还能在一定程度上减少网损率,满足大量的电力需求。经过多方实践和研究证明,风能作为一种清洁能源,在与电力系统融合时,能有效地改变电力的逆向分布特征,同时改善传统发电带来的环境污染。利用双馈风电机组实现风电并网,能提升电能输送能力,但存在的弊端则是很容易产生次同步振荡,影响风电网系统的稳定性,对电网产生一定的危害,因此有效地控制次同步振荡是必要的。相关学者一直深耕该领域,也取得了一些较好的办法。
吴熙等人[1]在研究双馈机并网过程中产生的次同步振荡控制方法时,提出自适应控制方法,建立精度控制模型,通过对参数结构的有效固定,通过改变附加阻尼的实时强度,在动态线性环境相爱,通过输入双馈风电机组的数据特征,完成动态控通过制;马天辉等人[2]在研究中电平换流器实现对风电机组的柔性输电,建立协同控制策略,在柔性直流输电条件下,有效地增加针对次同步振荡的控制能力,搭建风电场的阻尼控制方案,实现对次同步振荡的有效控制。
上述方法缺少一定的自主学习能力,虽然也能取得一定的控制效果,但是对次同步振荡的控制参数的关联性分析,还缺少一定的理论支持。本文提出一种双馈风电机组次同步振荡自主学习控制方法,力图在传统研究的基础上,给出优化解决方案。
1 双馈风电机次同步振荡问题的提出
考虑到双馈机组中风能的分布特征,风电场通常建于较为偏远的区域,这导致输电线路相对较长,在研究双馈风电机的次同步振荡问题过程中,需要将线路电感考虑进去,线路长短直接影响输出端电压,为了抵消线路感抗,增加相应的串联补偿电容,研究中假设额定功率为1.5 MW 的双馈风电机共有n台,并组成机组与电网对接[3]。
为了有效地分析双馈风电机组运行过程中产生的次同步振荡问题,在这一节首先分析次同步频段内的振荡等效电路机理:
通常情况下双馈风电机运行支路对应的等效阻抗为正,对应的变化幅值大于定转子运行支路阻抗,此时运行支路对谐振频率的影响极小,可以暂时忽略。因此在双馈风机的分析中,将运行支路视为开路[4]。建立简化后的双馈风机对应阻抗[5]:
式中
Zdfi—双馈风电机的运行等效阻抗;
ωp—谐振电流的振动角频率;
ωs—定子角频率;
ωr—转子角频率;
Rs、Rr—定子和转子的电阻;
Lls、Llr—定子和转子的运行漏感;
Kip、Kii—短路电阻电流内部调节器的调节比例和调节系数;
Kd—d、q轴之间存在的交叉耦合项;
σp—双馈风电机的次同步转差率[6]。
将双馈风电机的电阻和电感表示为Rd、sLd,这有利于在复频域条件下对风电机串联补偿的研究,这种条件下获取的等效阻抗电路图为图1。
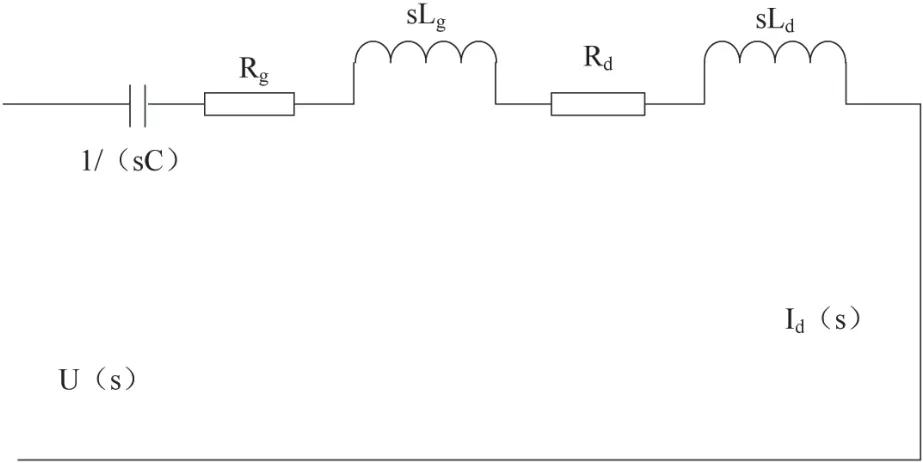
图1 等效阻抗电路图
根据图1 可知,R g、Lg对应的是线路的电阻和电感,C表示双馈风电机的串联补偿电容,Isub(s)表示双馈机的次同步电流,U(s)表示幅频域条件下与同步电流对应的总电压。
式中:
sLg—风电机组电感。
双馈风电机正常运行状态下,发生谐振频率时对应的容抗和感抗之和应为0,考虑到这一点可以得到正常运行状态下谐振点的等效阻抗[7]:
当Rd+Rg< 0时,谐振电流受到负电阻影响,逐渐放大后导致发生功率次同步振荡。通过分析简化的双馈风机对应阻抗和等效阻抗电路图,描述了双馈风电机的运行等效阻抗、谐振电流、串联补偿电容等参数。并且指出了在正常运行状态下,谐振点的等效阻抗应为0,但由于谐振电流受到负电阻影响,逐渐放大后会导致发生功率次同步振荡。因此,阻抗调整是解决次同步振荡的主要方法。
2 双馈风电机次同步振荡控制中的转差率约束关系分析
通过上一章节可以看出,当双馈风电机在完成串联补偿时,可能会发生电气的自激振荡情况,双馈风电机整体的次同步振荡将会增加,由于其中包含了感应发电机效应的振荡路径,此时,次同步振荡频率受到多方面因素的影响:其中包括串联补偿效应、变压器状态以及线路的等效容感参数,为了使次同步振荡的控制能更加全面,需要准确掌握次同步振荡中,这些参数存在耦合关系,不能同时作为约束条件,带入到控制方法中。本文以转差率作为约束条件,下面证明其可行性:
双馈风电机的次同步振荡转差率为:
式中:
fs—风电机定子侧三相电压对应的频率;
fm—转子的机械转动频率[8]。
考虑到同步振荡转差率中存在的振荡分量,假设对应的交流频率在7 Hz 左右,那么此时双馈风电机组的转子范围在(40~60)Hz 范围内,次同步转差率的数值均为负,风机转速较低时,相对应的fm值也会较小,此时获得的R rσp绝对值则会变大,间接使双馈风电机组中的电阻成分更容易被抵消,导致风电网中的弱阻抗现象更加严重[9]。
在风电网的回路中,如果存在一定程度的次同步转差率分量,那么双馈风电机组中将会产生扰动电流,此时导致的变流器的输出电压发生波动[10]:
式中:
n—风电网的回路数量;
Δis—谐振频率变化量;
Kp—双馈逆变器的电路回流比例次数。
在双馈风电机组的运行中,产生的激磁电抗相对于定转子漏抗[11]会更多,此时可以得到总等效电阻并表示为:
式中:
Rr—转子电阻;
Rs—定子电阻;
R—风电机组的实施变化电阻。
根据公式(7)中对总等效电阻的求解,在其中增加了一定的负阻尼,表明逆变器额实际作用对象为感应发电机效应产生的次同步振荡,而振荡中的具体成分受到变流器控制后,逐渐形成正反馈,次同步电流在这个过程中逐渐增大,形成双馈风电机正向激励,当感应发电机效应不再产生振荡时,风电网的运行振荡也会更快发散,双馈电机的负阻尼大小跟随风电机的转速而发生实时变化,转速越低时负阻尼的绝对值会越大,此时双馈风电机组系统的阻尼相对薄弱,考虑到次同步成分在转子电压上的作用情况,获得定转子之间的电压关系[12]:
式中:
N—双馈风电机组的定转子匝比;
ur—转子电压;
ur—定子电压。
通过上述分析可知,正常运行状态下的双馈风电机组中转子对应的全频率范围在(40~60)Hz,实际的转差率范围在正负0.2 之间,而当次同步范围在7 Hz 时,实际的转差率范围在-7.5 到-4.6 之间,即使是微小的次同步分量,也会在双馈风电机的转子侧产生较为严重的电压压力,在一定程度上增加风电网的适应难度。次同步频率的高低,对转差率有着一定的、影响,当频率越低时,导致转子电压的次同步成分越大。研究中得出次同步振荡时针对转差特性[13]的研究结果,如表1 所示。

表1 转差特性放大效应研究
通过分析双馈风电机的转差率、转子电压与定子电压之间的关系,了解不同频率范围下次同步振荡的特性和影响。在次同步频率较低的情况下,转差率范围较大,导致双馈风电机转子电压承受较大压力,增加了风电网的适应难度。同时,表1 中给出了针对转差特性的研究结果,进一步揭示了次同步振荡时的转差率特性,因此,以转差率作为控制约束,是可行的。
3 转差率约束下次同步振荡控制方法设计
基于上述的双馈风电机次同步振荡机理与特性分析结果,文中选择利用多目标深度学习进行次同步振荡控制,由于深度学习具备较强的自适应分析能力,能通过简单的结构完成难度较大的训练,由于双馈风电机组的数据较多,因此深度学习模型中,除了基础的输入层、隐含层和输出层之外,将隐含层的数量设置为6 层。深度学习状态可表示为:
式中:
w—深度学习迭代权重;
b—偏置条件;
f(· )—深度学习的激活函数;
a—学习层数;
wi—输入层神经元;
xi—输出层神经元;
j—深度学习状态;
ym—针对双馈风电机组的多目标深度学习目标;
wim—分析提取风电机组次同步振荡所须的迭代权重;
bm—机组偏置[14]。
选择合适的转差率数据作为约束,将振荡中的串联补偿效应、变压器状态以及线路的等效容感参数作为输入,实现多目标深度学习训练。具体的控制过程如下:
通过第一章节内容可知,在转子侧控制阻尼,这在一定程度上可以获得与转速变化相反的电磁转矩[15],保证次同步振荡为正向阻尼,实现抑制控制效果,加强风电并网的的实时性能。因此,将双馈风电机组的转速偏差作为多目标深度学习的输入约束量,经过隐含层的控制连接,完成对应的滤波平衡,当转速变化在d、q轴上产生电压变化时,则可以直接添加到原始的参考电压中,实时进行阻尼控制。
设定风电机组的转速变化量rωΔ ,在d、q轴上转子侧完成控制过程中,产生的电压变化情况如下:
式中:
ΔVd、ΔVq—d、q轴上的转子侧控制变化过程中的电压变化量;
Vd r、Vqr—附加阻尼条件下的电压变化情况;
Gd r、Gqr—d、q轴上的阻尼分量;
Δφr—隐含层的变化分量。
利用d、q轴上的附加转矩ΔTerd和ΔTerq可以实时改变阻尼,达到控制振荡的效果。
4 实验验证分析
4.1 实验环境
为了验证出本文方法下双馈风电机组次同步振荡控制方法是否有效,进行测试实验。实验中设定基础频率为500 Hz,并在串联补偿中设定40 %的振荡源,风电机组的串联补偿电容值设为35 uF,并在实验的第8 s 发出振荡源,文中研究的控制方法实时出发在转子处。次同步振荡的振源:发电设备(如发电机齿谐波(900~1 500)Hz)、输配电系统用电设备(如晶闸管整流设备)存在宽频带谐波源;共振点:网架与风电并网系统构成的容感回路有固定的振荡频率。次同步振荡种类为欠阻尼。本文设计的控制方法依托DSP 芯片,本文方法下的振荡抑制电路如图2 所示。
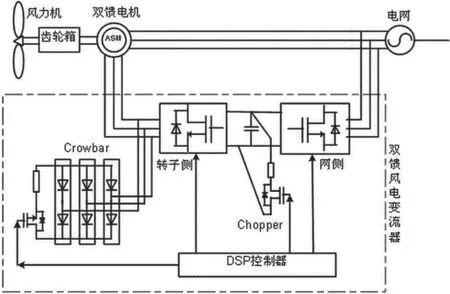
图2 本文方法下设计的次同步振荡抑制电路
在未投入任何控制措施下的双馈风电机组次同步振荡情况如图3 中的波形所示。根据图3 中放大后的波形可以看出,次同步振荡发生在第8 s 的时候,经过1 s 之后,第9 s 后波形开始严重失稳。

图3 双馈风电机组的次同步振荡情况
4.2 实验微观指标
在双馈风电机组的次同步振荡控制中,较高的阻尼比可以表述抑制振荡的有效性,并加速系统回到稳态,降低振荡幅值和频率。表达式为:
式中:
ΔVd、ΔVq—阻尼系数;
Vd r、Vqr—双馈风电机组转动惯量;
Gd r、Gqr—双馈风电机组的刚度。
4.3 实验结果对比分析
在40 %的双馈风电机组串联补偿度下,可以证明附加阻尼对次同步振荡控制是有效的。接下来为进一步测试设计方法的实用性,采用文献[1]方法、文献[2]方法作为对比方法,则三种方法的控制结果如图4 所示。
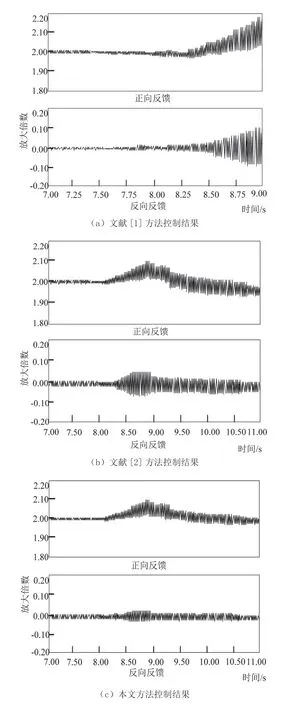
图4 不同方法控制结果对比
对双馈风电机组的次同步振荡投入控制策略,根据图4 中的实验结果表明,设计方法能够有效降低次同步振荡的波动,而对比方法控制后的次同步振荡波动仍较大,说明设计方法的控制效果较好,具有实用性。
为进一步验证设计方法的控制效果,以阻尼比为实验指标进行对比测试,测试结果如图5 所示。
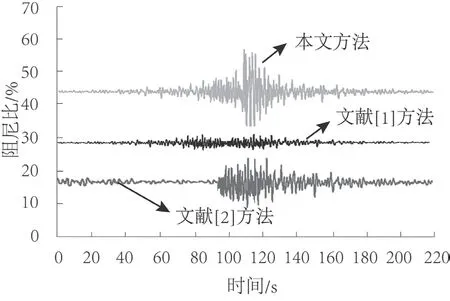
图5 不同方法阻尼比
根据图4 可以看出,本文方法的阻尼比明显高于对比方法,最高时达到43.2 %,而文献[1]方法的阻尼比最高达到了28.4 %,文献[2]方法的阻尼比最高达到了18.7 %。由此可见本文方法的次同步振荡控制效果较好。
为验证设计方法的实效性,进行次同步振荡控制时间测试,测试结果如表2 所示。
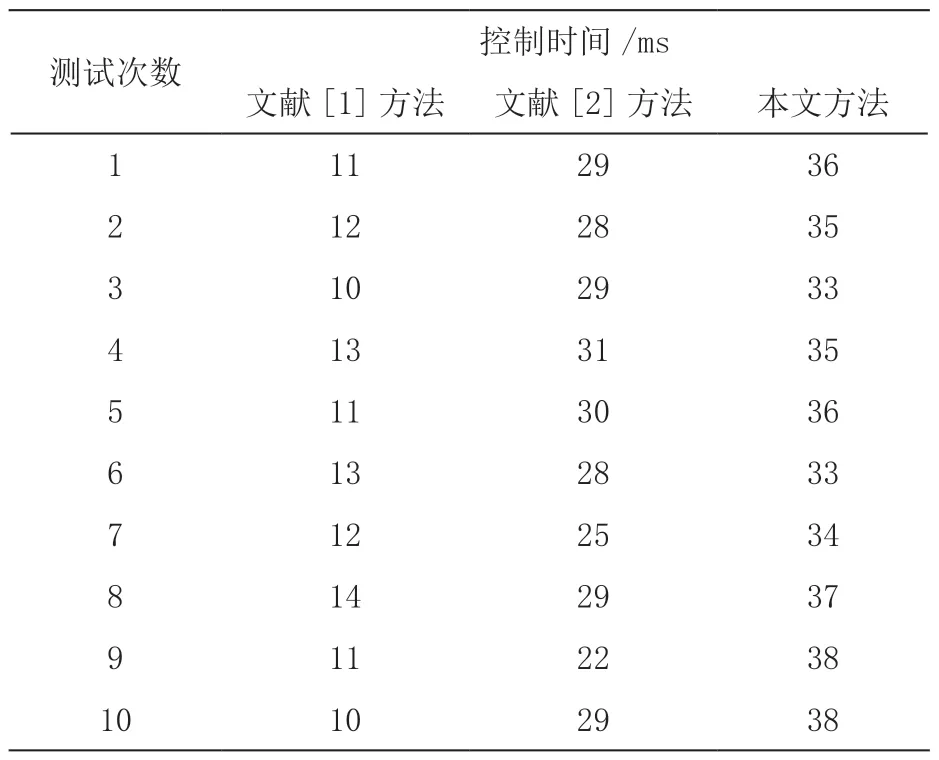
表2 测试结果
根据表2 可以看出,本文方法的次同步振荡控制时间最高为14 ms;而对比方法的次同步振荡控制时间明显高于本文方法,文献[1]方法的次同步振荡控制时间最高达到了31 ms,文献[2]方法的次同步振荡控制时间最高达到了38 ms。由此可见,本文方法的控制效率较高,具有实用性。
5 结论
为提高双馈风电机组在风电并网中的适应能力,提高并网性能,减少风电机组受到的次同步振荡影响,在研究次同步振荡控制方法的过程中,通过分析双馈风电机次同步振荡机理,进行次同步振荡特征分析,基于多目标深度学习,构建输入层、隐含层和输出层,实现对次同步振荡的特征提取和分析,实现迭代控制。实验中验证了投入控制策略的最佳时间,也证明通过控制附加阻尼能有效地实现次同步振荡的控制。
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2021年6期)2022-01-17
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
数学物理学报(2016年6期)2016-04-16
防爆电机(2015年6期)2016-01-27
电气开关(2015年2期)2015-06-23
电测与仪表(2015年16期)2015-04-12
大电机技术(2015年5期)2015-02-27
