极地冰雪探测冰雷达技术发展回顾与展望
2024-01-15 11:39:22邢治瑞稂时楠赵博窦银科肖鹏李霖孙波崔祥斌
极地研究 2023年4期
邢治瑞 稂时楠 赵博 窦银科 肖鹏 李霖 孙波 崔祥斌,6
(1 中国极地研究中心(中国极地研究所), 上海 200136;2 太原理工大学电气与动力工程学院, 山西 太原 030024;3 北京工业大学信息学部, 北京 100124;4 中国科学院空天信息创新研究院, 北京 100094;5 中国空间技术研究院钱学森空间技术实验室, 北京 100094;6 浙江大学极地观测技术与装备工程中心, 浙江 舟山 316000)
0 引言
极地冰盖保存了高精度、高分辨率的古环境和古气候记录, 是研究全球气候过去、现在与未来演化的重要载体[1]。极地冰盖的物质平衡和不稳定性及其对全球海平面的潜在影响[2], 是当前全球气候变化和地球系统科学研究的前沿热点。极地海冰是海洋-大气交互系统的重要组成部分,与全球气候系统间存在灵敏的响应和反馈机制[3],对两极地区海冰的遥感监测研究有助于分析海冰对区域和全球气候的近期和长期影响[4-5]。上述都是当前极地科学和全球气候变化研究的前沿热点,不过, 由于缺乏足够的冰表面以下的观测数据以及建立在观测数据上的对关键物理机制和过程的认知[6], 相关研究也存在巨大的挑战。
冰雷达是1 种用于极地冰盖、海冰及其上覆积雪探测的地球物理观测技术。冰雷达技术基于特定频段的电磁波在冰雪内的良好“穿透性”, 通过发射电磁波并接收信号在冰雪介质中介电不连续位置的回波[7], 从而探测和刻画冰岩界面以及冰雪内部层位和结构等特征。通过定量分析雷达回波的延时、能量、相位、信号特征等, 可以精确测绘极地冰盖、海冰及其上覆积雪的厚度、冰下地形、冰底环境和内部结构等。冰雷达观测结果为研究极地冰盖物质平衡、动力学和不稳定性,重建冰盖历史演化、古气候和古环境信息, 揭示海冰厚度及其生消过程提供了重要依据[8]。相较于地震、重力等其他地球物理方法和冰盖钻探等技术手段, 冰雷达具有数据分辨率高、信息量大和观测效率高等优点。目前, 人类对极地冰盖厚度、冰下地形地貌、冰下湖和水文系统等的认识,主要依靠冰雷达技术的观测应用和数据研究[9-11]。这些信息为极地冰盖及其对全球气候变化影响的评估和预测研究提供了重要的参数、初始条件、边界条件和约束条件。不过, 由于观测数据时空分辨率的不足, 以及部分关键区域观测数据的缺失, 现有模型对极地冰盖不稳定性及其全球海平面贡献的评估预测结果仍存在较大的不确定性[12], 而不同模型结果之间的一致性也较差。因此, 发展性能更强且适用于更广泛科学目标观测需求的冰雷达技术, 加强冰雷达在极地的观测应用, 成为全球气候变化研究的迫切需求。
上世纪50 年代, 飞机雷达高度计在极地冰盖上空读数异常的现象使得科学家偶然意识到电磁波能够很好地“穿透”冰盖[13]。随后, 出现了以测量冰盖厚度、探测冰下地形为主要目的的早期冰雷达系统。在此期间, 科学家逐渐发现冰雷达还可以用于探测冰下湖, 识别冰盖内部冰层。随着冰雷达用于极地冰盖探测研究内容的拓展与深入, 以及相应卫星导航定位、计算机、电子信息、信号处理等技术的快速发展, 冰雷达的种类也在不断丰富, 性能得到快速提升[13]。通常, 按探测目标深度, 冰雷达可分为深部探测冰雷达和浅表层探测冰雷达。前者的主要作用是探测极地冰盖的厚度和冰下地形、深部冰层结构、冰下水和冰下湖的分布等; 后者的主要作用是探测极地冰盖浅部冰雪层分布、海冰及其上覆雪层的厚度[14]。此外, 根据搭载平台不同, 冰雷达也可分为地面、机载和星载3 种(图1)。地面冰雷达的探测深度、准确性和定位精度较高, 而且测线网格间隔可以设计得很小, 适合冰盖局部精细化和强化探测;不过, 受冰雪面条件限制, 地面观测到达能力不强, 且覆盖面积相对有限。机载冰雷达的探测效率高、到达能力强、覆盖面积大, 并且可以搭载多型冰雷达开展同步观测, 适用于极地冰盖和海冰的大范围、多样化调查, 是迄今为止应用最为广泛的冰雷达探测方法(各国近年来常用的航空平台见图2)。不过, 大范围的机载冰雷达调查对后勤保障的要求较高, 具有一定的挑战性。星载冰雷达目前主要用于地外冰体的搜寻和探测研究,受地球电离层、系统尺寸和功耗多方面因素的制约, 尚未出现用于地球极地冰盖深部探测的星载冰雷达系统。
2009 年, 崔祥斌等[13]对极地冰盖探测冰雷达技术的发展历程进行了回顾总结, 概述了国际上用于极地冰盖探测的主要冰雷达系统及其性能参数, 但是文章内容主要以2010 年以前的深部探测冰雷达技术为主。近年来, 面向新的观测和研究需要, 一批具有高性能、低损耗, 且针对性更强的新型冰雷达技术开始被用于极地冰盖、海冰及其上覆积雪的探测; 颠覆传统技术的新概念冰雷达技术也被提了出来。例如, 为了规避传统主动探测冰雷达高成本和高功耗的缺点, 利用环境无线电作为探测波的无源被动雷达[15], 以及可以用于极地冰盖深部探测的星载冰雷达技术。
本文在前人工作[13]的基础上, 重点从极地冰盖深部探测、极地冰盖和海冰浅表层探测以及新型极地冰雪探测3 个方面, 综合评述了国际和国内最新的冰雷达技术发展。其中, 极地冰盖深部探测冰雷达技术能够穿透极地冰盖大部分区域(探测深度至少达到极地冰盖平均厚度2 km); 极地冰盖和海冰浅表层探测冰雷达技术以高垂向分辨率探测为主要目标, 探测深度通常小于1 km;新型极地冰雪探测冰雷达技术主要是指探测方式和理念有突破性创新的冰雷达技术。最后, 本文对未来冰雷达技术的发展方向进行了预测和展望。
1 极地冰盖深部探测冰雷达技术
冰厚和冰下地形是极地冰盖的基本特征, 但是, 在冰雷达技术出现之前, 人类对极地冰盖冰厚和冰下地形的认识几乎是空白。因此, 早期冰雷达系统都是以极地冰盖深部探测为目标的。20世纪50年代, 人类第一次发现电磁波在极地冰盖内部的强穿透性(弱衰减性)。随后, 研制基于电磁波理论, 可以测量极地冰盖厚度的冰雷达系统被提上日程。1960年, 英国剑桥大学研制出世界上第一台冰雷达(SPRI Mark )Ⅰ。之后, 美国陆军电子实验室(U.S. Army Electronic Laboratory, USAEL)、俄罗斯(苏联)南北极科学研究所(Arctic and Antarctic Research Institute, AARI)等研究机构相继开始研制和使用各种极地冰盖深部探测冰雷达系统。期间, 冰雷达的改进升级也主要以提升探测深度为主, 其中, SPRI Mark Ⅰ在野外测试的基础上, 先后升级为SPRI Mark Ⅱ— Ⅴ, 主要在发射机功率和自动记录方面进行了重大改进, 并成功用于格陵兰和南极冰盖的探测。1967年, AARI 设计并研制出该国首套深部探测冰雷达系统RLS-60-67, 工作频率为60 MHz, 发射功率达到20 kW。RLS-60-67的后续改进版本有 RLS-60-74(1974 年) 、 RLS-60-98(1998 年) 和 RLS-60-06(2006年), 为了提升探测深度, 改进后系统的发射功率逐步提高到60 kW 和80 kW。2013年, 俄罗斯研制了一款新的冰雷达系统PLK-130, 工作频率130 MHz, 带宽15 MHz, 但发射功率降低到0.2 kW。2015年1月, PLK-130被用于南极兰伯特冰川(Lambert Glacier)的冰厚和冰下地形探测[16]。
早期极地冰盖深部探测冰雷达的研制主要集中在20 世纪60 年代至80 年代, 这一时期的冰雷达中心频率低, 继而垂向分辨率较低, 但是探测深度大, 可以穿透整个极地冰盖探测到冰盖和基岩的交界面, 从而满足测量冰盖厚度和计算冰下地形高程的需求。上世纪80 年代后, 随着计算机、电子信息和数字信号处理技术的发展, 冰雷达的性能也得到了显著的提升, 而卫星导航和定位技术的出现, 极大地提升了地面和航空冰雷达探测的精度。这一时期, 美国、苏联(俄罗斯)、英国、德国、日本和丹麦等国家相继研制出各自的冰盖探测冰雷达系统[13]。
进入21 世纪以后, 在极地冰盖深部探测冰雷达技术发展和系统研制方面, 以美国堪萨斯大学最为突出, 其研制的冰盖深部探测冰雷达系统,具有多通道、强探测能力和高垂向分辨率等优点。2005 年, 堪萨斯大学专门成立了冰盖遥感观测中心(Center for Remote Sensing of Ice Sheet, CRe-SIS), 研制开发了频率范围覆盖14 MHz~38 GHz 的一系列冰雷达系统, 主要包括雷达测深仪(Radar Depth Sounder, RDS)、积累率雷达(Accumulation Radar)、雪雷达(Snow Radar)和雷达高度计(Radar Altimeter)4 个序列。其中, RDS 属于深部探测冰雷达系统序列, 其他3 种则属于冰盖浅表层探测冰雷达。RDS 的工作频率介于14~600 MHz 之间, 最大探测深度能够达到5000 m[17]。RDS 的升级型号Multi-channel Coherent Radar Depth Sounder(MCoRDS), 被用于了第四次国际极地年期间美国和英国主导的南极甘伯采夫山脉(Antarctic’s Gamburtsev Province, AGAP)国际合作计划[13,18]。2009 年, 美国航空航天局(National Aeronautics and Space Administration, NASA)牵头发起了迄今以来规模最庞大的极地冰盖航空观测计划——冰桥计划(Operation IceBridge, OIB)[19]。OIB 于2020年结束, 历经10 余年, 应用于各类飞机平台(图2),搭载RDS 改进型——多个型号的多通道相干深部探测/成像冰雷达系统(Multi-channel Coherent Radar Depth Sounder/Imager, MCoRDS/I)(表1 为MCoRDS/I 的不同型号及其性能参数), 对北极格陵兰冰盖和南极冰盖开展了大范围、详细的航空探测[19]。CReSIS 研制的MCoRDS/I 是目前国际上最先进的极地冰盖深部探测冰雷达系统, 该系统工作频率位于甚高频(VHF)频段, 不同型号雷达的带宽不同, 其多通道观测能力, 一方面可以有效压制噪声对冰岩界面位置弱反射信号的干扰,另一方面也为兼顾冰盖深部探测和浅表层高分辨率探测提供了技术解决方案[20]。目前, 德国的Polar 5 和Polar 6 两个极地科考航空平台也是搭载了MCoRDS/I。
除了CReSIS 的RDS 系列深部探测航空冰雷达系统, 美国德克萨斯大学地球物理学中心(University of Texas, Institute for Geophysics,UTIG)研发和维护的高性能航空冰雷达(High Capability Airborne Radar Sounder, HiCARS)是另一常用于极地冰盖深部探测的冰雷达系统, 其工作频率介于52.5~67.5 MHz, 中心频率60 MHz,带宽15 MHz。HiCARS 具有高增益和低增益两个通道, 可以同时满足冰盖深部和浅表层高分辨率探测需求, 其垂向分辨率约为10 m, 对冰盖深部探测能力接近5000 m[21-22]。近几年, HiCARS 被UTIG 改进更新为HiCARS 2 和全相位多频航空冰雷达(Multifrequency Airborne Radar Sounder with Full-phase Assessment, MARFA)。HiCARS 2在全面继承HiCARS 探测技术的基础上, 垂向分辨率达到了 5.6 m(纯冰)和 9.5 m(干雪)[23]。MARFA 使用两个发射和接收开关, 采用低噪声放大器系统, 并增加1 个数字化模块, 允许对每个天线(两个偶极子天线阵列)的回波进行单独记录。在格陵兰岛博多因冰川(Bowdoin Glacier)的现场探测中, MARFA 的沿测线和垂向分辨率分别为15 m 和5 m[24]。
2010—2011 年夏天, 英国南极调查局(British Antarctic Survey, BAS)在南极中心冰流和米勒冰流调查计划(Institute and Möller Antarctic Funding Initiative, IMAFI)中使用了1 套航空极化测量冰雷达系统(Polarimetric Airborne Survey Instrument,PASIN)。PASIN 的中心频率为150 MHz, 带宽为12 MHz, 峰值功率为4 kW, 具有312.5 Hz 的脉冲编码波形采集速率。PASIN 可以交替发射脉冲和线性调频信号, 其中, 脉冲信号数据主要用于冰盖中内部冰层的成像, 而能量更强的线性调频信号则用于探测冰盖深部冰层和冰下基岩面。PASIN 使用匹配滤波器对脉冲进行压缩, 采用欠奈奎斯特(Sub-Nyquist)采样技术对接收到的后向散射信号进行数字化和采样。在IMAFI 计划南极现场观测中, PASIN 安装于双水獭(Twin Otter)飞机上, 系统由8 个折叠偶极子天线单元组成, 其中4 个折叠偶极子天线单元安装在左舷翼下面用于发射信号, 另外4 个天线单元安装在右舷翼下面用于接收信号[25-27], 共完成2.5×104km航空测线[28]。
由于冰雷达在极地冰盖注出冰川和暖冰区的信号衰减非常严重, 常常导致无法探测到冰下基岩面。针对这一问题, NASA 在冰冻圈科学计划(Cryospheric Science Program)中研制了1 款波长达10 m 的机载深部探测冰雷达——暖冰探测器(Warm Ice Sounding Explorer, WISE), 用于探测这些区域的冰厚和冰下地形。WISE 借鉴了火星快车航天器上的Mars Advanced Radar for Subsurface and Ionospheric Sounding (MARSIS )
行星探测仪的方式, 以2.5 MHz 的中心频率工作,并使用传统的 GPS 导航, 配有单极子天线。2008—2010 年, 在格陵兰冰盖南部和东南极冰盖进行的3 次探测试验中, WISE 机载冰雷达成功探测到格陵兰南部冰盖冰厚, 证明了WISE 系统在电磁波高散射和高衰减的冰盖边缘暖冰区中测量冰厚的能力[29]。
极地冰盖冰芯记录可以为地球气候变化研究提供不可替代的宝贵信息, 不过, 冰芯钻探是1项极具挑战且高成本的工作, 其中的钻探选址非常关键, 而精细的冰雷达观测结果可以为钻探选址提供重要依据。高灵敏度、高分辨率的冰雷达探测可以提供冰盖内部冰层结构、冰厚、冰下地形和冰底环境等重要数据, 为确定冰芯钻孔最佳位置提供依据[30]。为此, 美国通过与日本、挪威合作研制了1 款小型、多通道、宽带VHF 冰雷达系统, 其工作频率为170~230 MHz。该冰雷达系统被安装在日本南极科学考察队(Japanese Antarctic Research Expedition, JARE)的履带式雪地车辆上, 在2018 年11 月—2019 年1 月期间, 对南极冰穹 F 进行了探测。结果显示, 该冰雷达探测到了以前未能探测到的冰盖深部内部冰层,为认识冰盖底部冰层特征、评估其埋深-年代关系, 进而寻找超过百万年深冰芯钻探理想位置提供了重要信息[31]。2019 年, 东格陵兰冰盖深冰芯钻探计划(East Greenland Ice-coring Project,EGRIP)使用了三型地面多通道冰雷达, 成功探测到了超过2.7 km 深的冰盖底部冰层以及冰下水层, 而内部冰层的垂向分辨率优于60 cm。这三型地面多通道冰雷达系统分别属于VHF、超宽带(Ultrawideband, UWB)、超高频(UHF)雷达, 由哥本哈根大学牵头研制。三型雷达共享相同的数字波形发生器和数字信号发生器, 安装在雪地车上进行观测, 并采用3 种不同的天线阵列, 在3个子波段(170~230 MHz、180~340 MHz 和600~900 MHz)上运行[32]。相较于航空冰雷达探测, 地面冰雷达探测移动速度慢, 可以在保证沿测线数据分辨率的基础上得到一定数量级的可叠加信号,从而提高冰盖内部层和冰岩界面回波信号的信噪比[32]。此外, 这三型冰雷达还具有多极化探测的能力, 可以用于分析冰晶组构等影响冰体介电常数的重要信息[32]。
相较于国外, 我国应用深部探测冰雷达开展极地冰盖测绘起步较晚。中国第21 次南极科学考察期间(2004—2005 年), 首次沿南极中山站至冰穹A 内陆冰盖考察断面开展车载冰雷达探测[33]。中国第24 次南极科学考察期间(2007—2008 年), 进一步对冰穹A 开展极高空间分辨率的强化观测[34]。上述冰雷达探测的主要目标是测绘冰穹A 区域的冰厚和冰下地形, 从而为研究南极冰盖以及冰下甘伯采夫山脉的形成和早期演化提供依据[35], 并且寻找深冰芯钻探的最佳位置[36]。两次考察所使用的冰盖深部探测冰雷达系统均由日本国立极地研究所(National Institute of Polar Research, NIPR)研制[37]。2010 年以前, 中国在深部探测冰雷达系统研制方面一直都是空白。之后, 在国家863 计划项目资助下, 中国极地研究中心联合原中国科学院电子学研究所开始了冰雷达技术和硬件系统的研制开发。第28 次南极科学考察期间(2011—2012年), 中国自主研制的高分辨率极地冰盖深部探测冰雷达系统(High-Resolution Ice-Sounding Radar, HRISR)完成了对南极冰盖的首次探测试验, 探测深度超过2500 m。HRISR 的中心频率为150 MHz, 带宽为 100 MHz, 垂向分辨率达到0.75 m, 可在探测冰盖深部的同时, 对冰盖上部小于2 km 的内部层进行高分辨率成像[38]。该雷达系统经过进一步的改进和完善, 于第29 次南极科学考察期间(2012—2013 年)被用于内陆冰盖考察断面和冰穹A 区域的冰厚和冰下地形测绘。测量结果显示, 新一代的HRISR 探测深度超过3500 m,标志着中国第一次掌握了极地冰盖深部探测冰雷达系统的研发技术[39]。
2 极地冰盖和海冰浅表层探测冰雷达技术
不同于深部探测冰雷达, 极地冰盖和海冰浅表层探测冰雷达对探测深度没有过高要求, 主要用于高分辨率测绘极地冰盖浅层结构以及海冰和上覆积雪的厚度, 进而研究冰盖表面物质平衡、古积累率的时空变化以及海冰的生消等。浅表层探测冰雷达和深部探测冰雷达的主要原理基本一致, 但为提升探测垂向分辨率和精度, 通常工作频率更高。目前, 用于极地冰盖浅表层冰雪探测的冰雷达以调频连续波(Frequency Modulated Continuous Wave, FMCW)冰雷达为主。FMCW 冰雷达属于连续波(Continuous Wave, CW)雷达, CW雷达按发射信号的形式可分为非调制连续波(单频或多频)雷达和调频连续波雷达。FMCW 雷达结构简单、发射功率低, 具有极高的距离向分辨率, 被广泛用于极地冰盖和海冰浅表层冰雪探测。
CReSIS 是极地冰盖和海冰浅表层冰雪探测冰雷达研制的代表机构, 其研制的积累率雷达、雪雷达和雷达高度计均可归为浅表层探测冰雷达。积累率雷达是1 种UHF 雷达, 目前的工作频率是600~900 MHz[40], 其探测深度可达1 km; 雪雷达的工作频率范围可达2~8 GHz, 甚至是2~18 GHz, 可以厘米级的垂向分辨率对冰盖表面雪层和海冰上覆积雪的厚度进行大范围测量, 最大探测深度为40 m; 雷达高度计的工作频率分为12~18 GHz(Ku 波段)和32~38 GHz(Ka 波段), 探测深度分别达到10 m 和2 m, 主要用于测量表层积雪[17,41]。CReSIS 研制的积累率雷达和雪雷达均是FMCW 雷达, 主要搭载在飞机平台上。机载浅表层探测冰雷达系统被用于北极格陵兰冰盖内部层探测, 在格陵兰冰盖干雪区域的最大探测深度为200 m, 在有融水渗浸的区域为120 m, 在消融带为20 m, 与冰芯同位素分析得到的内部层数据误差为±1.5 m。CReSIS 也研制了搭载于雪地车平台的地面UHF 超宽带浅表层探测冰雷达系统, 工作频率范围为 500~2000 MHz, 冰内分辨率为0.1 m。地面浅表层探测冰雷达系统在格陵兰冰盖深冰芯钻探区域的探测深度达到200 m, 而通过雷达数据重建的古积累率与雪坑测量的积累率的误差在5%以内[42-43]。
雪深是反演积雪水当量的重要参数。为了高精度、大范围地测量极区干雪深度, 帮助测定积雪水当量, Kim 等[44]于2017 年研制出1 款小型积雪遥感雷达(工作频率14~16 GHz), 该雷达可兼容安装于低空飞机平台上, 对冰盖和海冰上的雪层进行探测。该小型积雪遥感雷达初步在美国猛犸山进行了测试试验, 被安装于雪塔轨道上对地面雪厚进行监测, 结果与同步的超声波仪器探测结果具有很好的一致性[44]。在加拿大自然科学与工程研究委员会(Natural Sciences and Engineering Research Council of Canada, NSERC)的资助下,谢布鲁克大学(Université de Sherbrooke, UdeS)研制了1 套轻量级、紧凑型的FMCW 浅表层冰雷达系统(工作频率24 GHz)。该系统利用新一代低成本、低功耗供应单元, 可用于测量淡水冰厚度和雪深, 进而对极区的冰雪特性进行监测[44]。2018年, Pomerleau 等[45]使用该雷达连续监测东南极冰穹C 区域的地表积雪密度, 并成功实现了对埋深30 cm 以上雪层密度的自动追踪和计算。
传统的地面和航空冰雷达观测极易受冰雪面条件、天气、后勤保障等多种因素的影响, 且费用较高。因此, 发展无人机平台搭载的冰雷达探测技术具有巨大潜力。目前, 无人机搭载便携式FMCW 冰雷达已经可用于高效、连续且无接触地探测极地冰盖和海冰浅表层。便携式FMCW 可集成安装在小型无人机上, 在手动遥控操作模式下,实现对极地冰盖和海冰及其上覆积雪厚度的低空飞行测量, 很好地克服了地面观测很难抵达且安全风险较大的问题, 并显著提升了观测效率[46-48]。无人机载冰雷达拥有较强的环境适应性和观测能力, 已成为1 种高效、可靠且具有较高安全性的探测技术, 但如何在高增益和高带宽的基础上实现冰雷达系统的轻量化、小型化, 目前仍是非常大的挑战。此外, 天线屏蔽性和距离模糊也是制约无人机载FMCW 雷达性能的重要因素。为了解决这些问题, Jenssen 和Jacobsen[49]研制了1 款专为无人机设计、用来测量积雪特性的超宽带雷达—— UWiBass。初代UWiBass 在经过更新后, 天线系统改进为2 轴角度调节机构, 提高了雷达天线在移动时的稳定性, 而系统带宽由0.95~6 GHz降低到0.7~4.5 GHz, 进一步增强了雷达系统对冰雪的穿透能力[49]。
我国在极地冰盖、海冰浅表层探测冰雷达技术的研究和应用方面仍处于起步阶段。中国第32次南极科学考察(2015—2016年)期间, 首次将中国极地研究中心与原中国科学院电子学研究所联合研制的车载超高分辨率FMCW 雷达系统用于中山站至冰穹A 内陆考察断面冰盖浅层探测(图3)。该FMCW 雷达的工作频率为500~2000 MHz, 带宽为1.5 GHz, 峰值功率为2 W, 脉冲宽度4 ms,采样频率6.25 MHz, 采用vivaldi 天线, 其冰内探测垂向分辨率可以达到10 cm, 探测深度在200 m以内。Guo 等[50]按照海拔快速上升区、平坦冰盖区、软雪带、冰裂隙区等对断面进行划分, 结合FMCW 雷达观测数据和浅冰芯记录, 对过去表面物质平衡的时空变化进行了分析研究[51]。中国第33 次南极科学考察期间(2016—2017 年), 科考人员再次使用该雷达系统对东南极冰盖进行了补充及重复探测[52], 旨在完善冰穹A 等关键区域的冰盖浅层冰层分布特征, 从而进一步揭示东南极冰盖等时层分布, 为冰盖表面物质平衡的评估和预测研究提供依据。

图3 我国自主研制的车载FMCW 冰雷达应用于南极冰盖观测Fig.3. The vehicle-mounted FMCW radar developed by China applied to detect the Antarctic Ice Sheet
3 新型极地冰雪探测冰雷达技术
相较于传统的极地冰雪深部和浅表层探测冰雷达, 新型极地冰雪探测冰雷达技术在探测方式和理念上均有突破性创新, 具体包括相敏冰雷达(phase-sensitive Radio Echo Sounder, pRES)、适应各类飞行平台的冰雷达系统包、固定式变化远程监测冰雷达等已得到应用验证的冰雷达技术, 以及仍处于方案探索或理论验证的星载和无源被动探测冰雷达技术。
21 世纪以来, 相敏冰雷达被广泛用于测量极地冰盖的垂直应变率、压实率以及冰架和冰川的底部融化速率, 为冰流动力学和冰架物质平衡研究提供了高精度的冰体垂向变化信息[53-54]。相敏冰雷达主要通过地面定点的长期测量来记录并推算冰盖内部层和底部界面回波信号的相位变化,进而来精确测量冰体厚度的变化。2002 年, 英国南极局研发了1 款基于矢量网络分析仪的步进频率相敏雷达(工作频率305 MHz, 带宽160 MHz),并用于George VI 冰架厚度的变化监测及其冰底融化率的计算, 其理论上的冰厚变化观测分辨率达到 0.75 mm[55]。随后, 该相敏雷达被升级为Autonomous pRES (ApRES)。ApRES 是1 种小重量、低成本的相敏FMCW 冰雷达, 在保持原来步进频率相敏雷达性能的同时, 不仅可以实现高精度的极地冰架/冰川厚度变化自动监测, 而且探测灵敏度更高、极区适应性和可操作性更强[56]。ApRES 先后被用于南极罗斯冰架(Ross Ice Shelf)、松岛冰川(Pine Island Glacier)和冰穹C 的冰厚变化监测试验。罗斯冰架的试验(2010—2011年)证明了ApRES 系统具备在无人值守情况下实现1 年以上长期监测冰架厚度变化的能力, 松岛冰川和冰穹C 的试验(2013—2014 年)则以冰盖探测为主, 成功观测到埋深超过1 km 的冰盖内部层变化。通过上述试验, 充分验证了ApRES 系统的环境适应性、稳定性及其性能[57]。
2013 年, 为实现极地冰盖和海冰的多样化探测和成像, Rodriguez-Morales 等[58]提出1 种可搭载于不同飞机平台的通用冰雷达系统包。冰雷达系统包集成了工作频率从最低的160 MHz 到最高的18 GHz 的四型冰雷达系统及其配套天线, 能够满足极地冰盖、冰架、冰盖边缘注出冰川以及海冰等不同类型冰雪介质的同步观测需求。这四型冰雷达系统与上文提到的CReSIS 研制的单型深部探测冰雷达、浅表层探测冰雷达系统基本一致[59-60], 其详细名称、性能参数和观测目标见表2。冰雷达系统包能被集成到包括双水獭、DC-8、P-3 等多型极地常用航空平台上, 并已多次用于南极和格陵兰冰盖的现场观测, 实现了极地冰盖的冰厚、冰下地形、不同深度内部层、表面地形以及海冰及其上覆雪厚的同步高精度观测[58]。Rodriguez-Morales 等[58]指出, 未来将进一步提升该系统包性能, 提高发射信号能量, 改进校准规程, 实现所有传感器的自动化观测和小型化设计, 满足无人机平台的搭载需求, 并允许根据地理位置和飞行高度自动调整参数设置, 从而实现对极区更为广泛的高效观测。
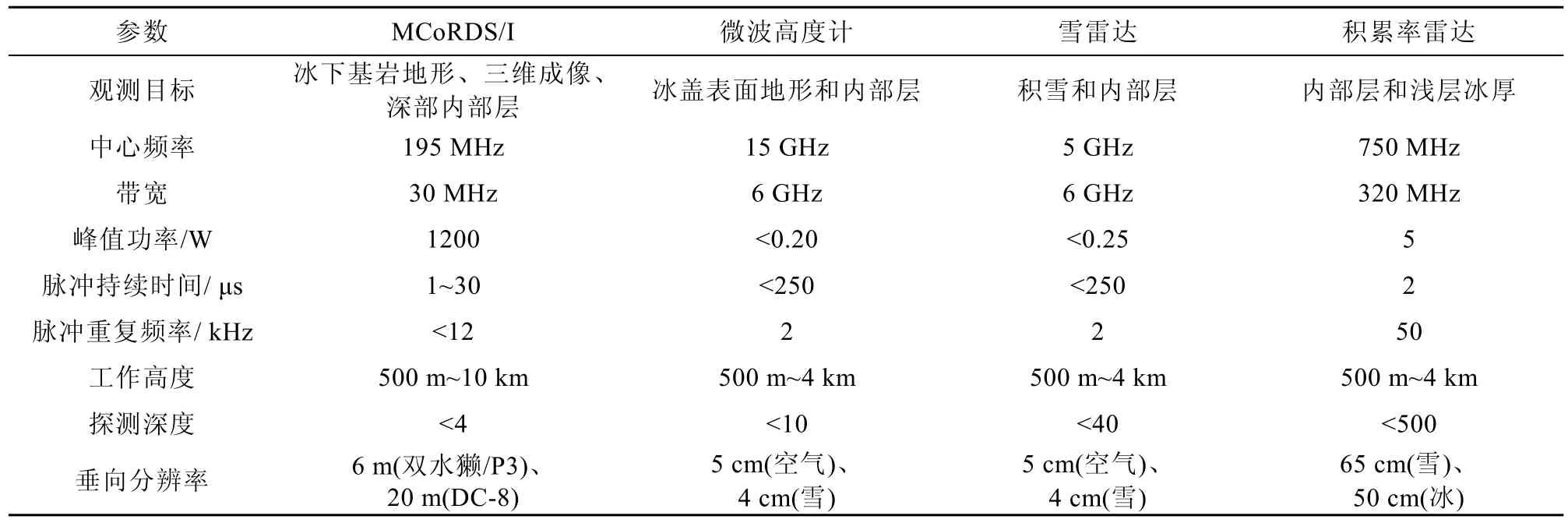
表2 通用冰雷达系统包中四型冰雷达的性能参数[58]Table 2. Performances of ice radars in the radar package[58]
为了满足极区不同类型冰川探测的需要,Mingo 等[61]设计研制出1 款固定式冰雷达(Stationary Ice-penetrating Radar, sIPR), 适用于极地从温冰川到寒冷冰架的远程变化监测。sIPR 在现有脉冲雷达的基础上, 增加了光纤链路、控制脉冲发射的定时模块, 还加装了微型不间断电源和卫星数据通讯模块, 以实现设备在寒冷地带的自动观测和数据传输。与寒冷的冰盖/冰川不同, 温冰川会导致电磁波信号的强烈衰减和散射损失, 而sIPR较低的工作频率(5~20 MHz)能够保证信号有足够的穿透深度, 并监测温冰川的快速变化。2014—2017 年, sIPR 被分别用于加拿大的卡斯卡沃尔什冰川(Kaskawulsh Glacier)和格陵兰彼得曼冰川(Petermann Glacier)的监测。前者在无人监管的情况下自主运行, 所测数据揭示了冰川堰塞湖附近的冰层变化特征; 后者自主运行近1 年, 成功监测到冰川厚度的变化, 并经数据分析后提取了内部层位的变化信息。两次现场试验证明了sIPR 在不同冰川类型下良好的适应性和自动观测能力。
尽管通过地面和机载冰雷达探测已经获取了非常丰富的极地冰盖观测数据, 但由于极区位置遥远、环境恶劣, 极大限制了地面和航空平台的运行范围和时间, 导致现有的测线网格空间分辨率较低, 且分布很不均匀。因此, 近年来, 国际上提出了可实现对地球表面进行大范围、短周期、均一化、重复观测的星载冰雷达技术。星载冰雷达发射的电磁波信号, 能够穿透大气、云层和雨水, 但是受地球电离层的影响较严重, 解决冰盖深部探测能力与天线尺寸、系统功耗之间矛盾和提高交轨向数据空间分辨率的挑战很大。2020 年,中国空间技术研究院提出了1 种天基极地冰盖观测技术(Tomographic Observation of Polar Ice Sheets, TOPIS)概念, 用来对极地冰盖进行高分辨率立体观测(图4)[62]。TOPIS 由主卫星与带有偶极子天线的立方星群组成, 形成了1 个大尺寸交轨基线, 配合顺轨向合成孔径技术实现空间二维高分辨率成像; 同时, 采用单发多收(SIMO)和模拟转发(MirrorSAR)体制来降低制造成本。TOPIS设计通过高发射功率和大天线增益实现对几千米厚的极地冰盖进行深部探测。模拟结果表明,TOPIS 可以实现100 m×20 m×5 m 的三维分辨率,并能够补偿65 dB 的冰盖内部衰减, 实现3.5 dB的探测灵敏度[63-64]。2022 年, 中国空间技术研究院进一步完善自主的天基冰雷达观测技术方案,通过分布式星群编队突破传统菲涅尔分辨极限,进而实现高空间分辨率的冰盖深部探测以及冰盖表面融化、内部结构、冰底水文环境的三维动态监测, 以满足极地冰盖几何特征、动态变化和物质平衡研究的需求[65]。同期, 国际上数个科研机构开始探索使用天基平台对极地冰盖进行季节尺度观测, 以弥补目前极地冰盖科学研究数据的不足[66]。2018 年, Gogineni 等[31]提出使用立方体雷达卫星系统(由50 颗卫星组成)探测极地冰盖的初步概念, 计划未来应用于南极洲冰盖高分辨率、大范围尺度的监测。2019 年, Carrer等[67]提出 1 种分布式雷达探测系统的新概念,旨在提高星载雷达在探测过程中的信噪比和跨轨分辨率, 解决无线电衰减和大范围杂波的问题。利用天基平台搭载低频冰雷达对极地冰盖进行观测, 可充分发挥天基微波遥感全天时、全天候、高重访观测优势, 最大限度地降低极地恶劣天气环境对探测过程的影响。此外, 天基冰雷达技术生存能力强、探测覆盖面积大, 能够对传统地面观测的盲区进行观测。不过, 受制于低频电磁波在电离层、大气层、冰层内传播的复杂性和作用距离的大幅增加[65], 目前天基冰雷达探测尚处于方案探索阶段。
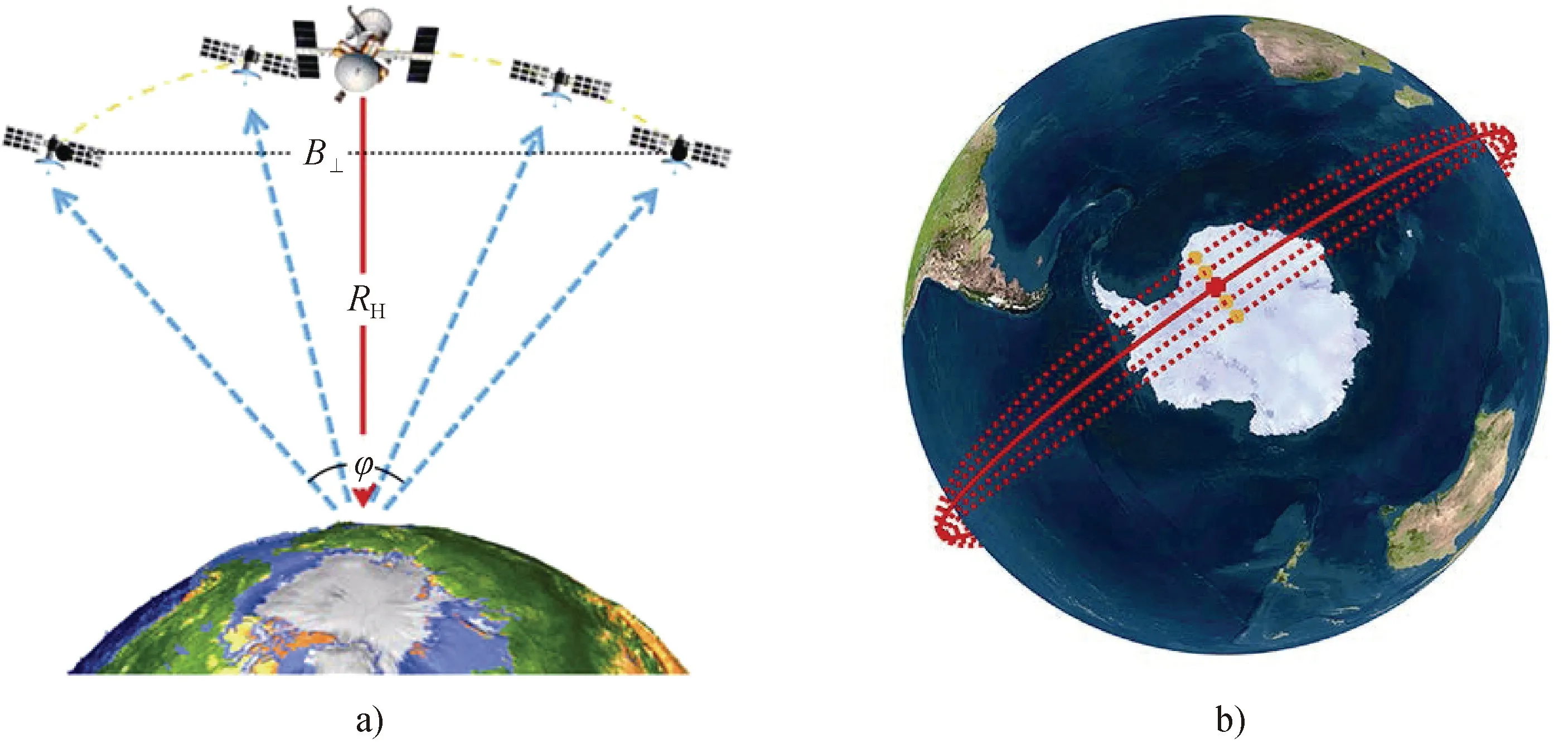
图4 TOPIS 系统[62]。a)跨轨道多静态雷达实现的长基线, B⊥为最大交叉轨道基线, RH 为卫星距地高度, φ 为观测角度; b)卫星轨道Fig.4. System of TOPIS[62]. a) long baseline realized by cross-track multistatic radar, B⊥ is the maximum cross-track baseline,RH is the height from satellite to groun, φ is the observation angle; b) orbits of the satellites
虽然上文提到的主动探测冰雷达是观测格陵兰和南极冰盖的主要遥感技术, 但是要实现在空间和时间尺度上的高分辨率冰盖观测和变化监测,对成本、能源和后勤保障方面的需求很高(特别是在探测任务资源极端有限的条件下)。与主动探测冰雷达系统需要发射无线电信号不同, 无源(被动)雷达是1 种利用环境无线电信号(比如全球定位系统GPS、地面数字视频广播和射电天文信号等)进行观测的低消耗遥感技术手段, 其探测成本低、不易受极地恶劣环境的限制, 非常适用于大范围的极地冰盖探测[68]。被动探测冰雷达功耗和成本更低、对信号信噪比和分辨率的影响也更小, 不过, 地球极区很少有人造无线电信号源的存在, 因而被动探测冰雷达的发展目前主要聚焦于使用天文源无线电(如太阳和木星)作为辐射观测的信号。2020 年, Peters[69]将太阳作为辐射观测信号, 提出了1 种利用合成孔径雷达(SAR)进行无线电被动探测的方法, 并在美国死亡谷(Death Valley)进行了试验, 展示了该方法从谷底提取太阳回波延迟时间、振幅和相位的能力, 为后续被动探测雷达用于极地冰盖大范围、高保真的监测提供了技术基础。2021 年, Peters[70]首次利用天文源无线电(太阳)对格陵兰冰盖的Store 冰川冰厚进行了被动探测(图5), 最大探测深度达到1017 m,并且与ApRES 主动雷达和BedMachine v3[10]的冰厚测量结果十分吻合。作为传统主动雷达探测仪的补充, 无源(被动)雷达能够实现前所未有的大范围空间尺度极地冰川探测和监测, 将大大提高探测的时空分辨率, 从而有效降低评估和预测冰盖对海平面上升贡献的不确定性。
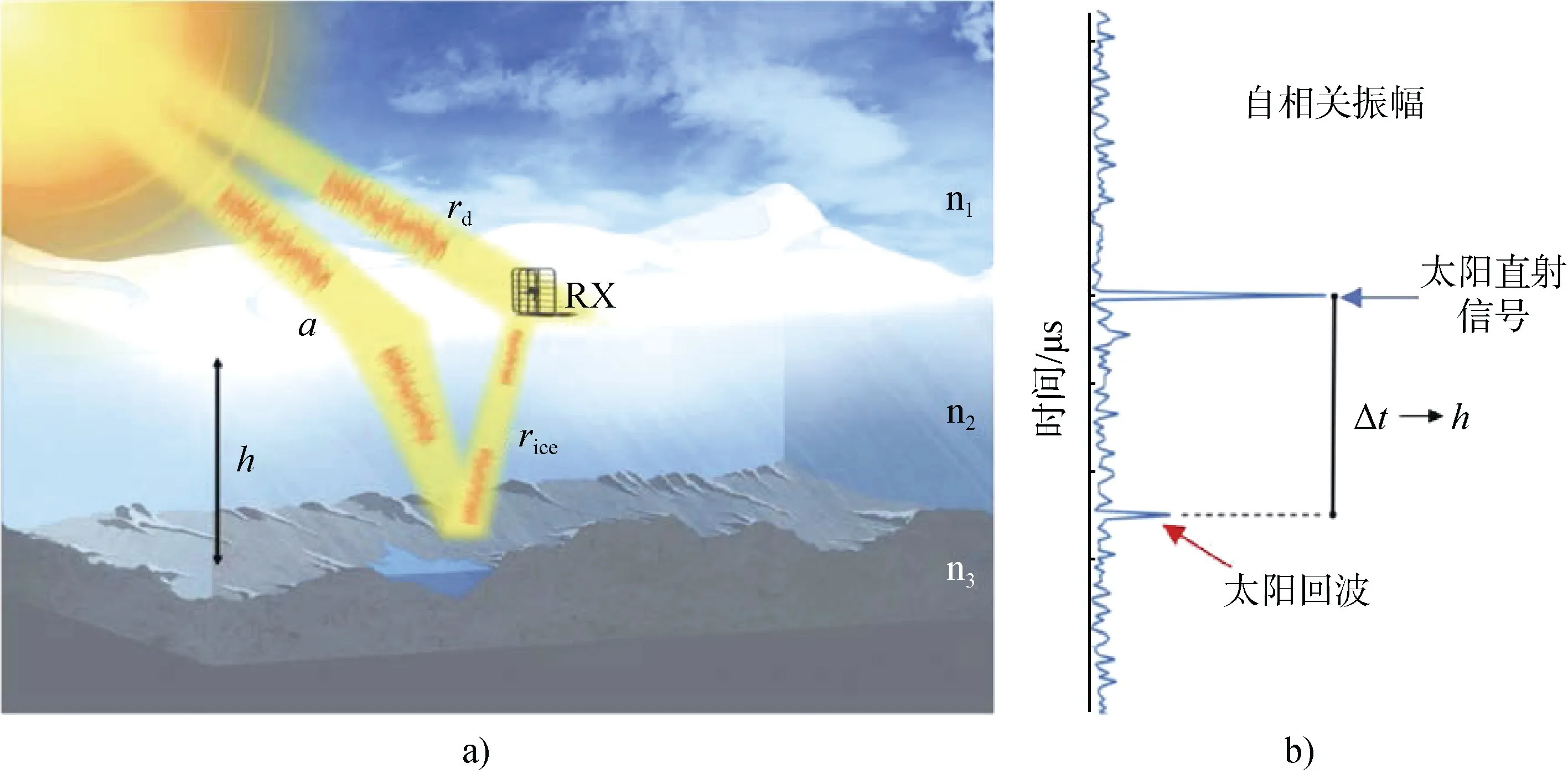
图5 无源被动探测冰雷达概念图。a)冰盖表面的无线电接收器RX 记录太阳光直射路径rd 和反射路径rice, 无线电信号在冰层中的传播会受到延迟和衰弱; b)将太阳直射信号(蓝)与太阳回波信号(红)间的延迟时间Δt 转化为冰厚h[70]Fig.5. Conceptual diagram of passive detection ice radar. a) the radio receiver (RX) on the ice surface records the direct sunlight path (rd) and the reflection path (rice), and its signal propagation in the ice layer is delayed and attenuated; b)the delay time (Δt) between the direct solar signal (blue) and the echo signal of the sun (red) is transformed into ice thickness (h) [70]
4 总结和展望
自上世纪60 年代冰雷达系统被首次研制成功并用于极地冰盖探测以来, 冰雷达技术的发展及其应用得到了长足的进步, 为极地冰盖的几何特征及其物质平衡和不稳定性研究, 以及历史演化、古气候古环境的重建, 提供了重要的基础数据。凭借数据的高分辨率、高精度优势, 以及强“穿透”性和相对较低的保障需求, 冰雷达是目前调查极地冰盖厚度、冰下地形、内部结构以及冰底环境最有效的技术手段。随着观测研究的深入,冰雷达的性能得到了快速的提升, 而冰雷达系统的类型也逐渐多样化——从最初以极地冰盖深部探测为主要目标的深部探测冰雷达, 到现在的深部、浅层、表层、积雪探测以及通过相位变化来精确测定冰厚变化的各类冰雷达系统; 同时, 具备了多通道、多频、多极化和不同系统同步观测的能力。此外, 冰雷达不仅可以搭载于最初的固定翼飞机和雪地车平台, 而且也能搭载于直升机、大型和小型无人机、地面机器人等平台上, 而适用于卫星平台的冰雷达技术也被提上日程。
现有的冰雷达都属于主动探测类型, 即冰雷达系统需要发射特定频段的电磁波信号。主动探测冰雷达的运行成本、能源消耗和后勤保障需求很高, 很难满足高时空分辨率冰盖观测和变化监测。因此, 最近, 科学家提出了利用环境无线电信号进行观测的无源(被动)雷达技术。目前, 被动探测冰雷达的发展主要聚焦于使用天文源无线电(如太阳和木星)作为辐射观测的信号, 尽管有试验结果表明其可行性, 但尚处于技术论证阶段。
我国的极地冰盖探测冰雷达技术研究起步较晚。2004 年中国第21 次南极科学考察, 首次引进日本的双频地面冰雷达系统, 用于中山站至冰穹A 的内陆冰盖考察断面探测。之后的中国第24次南极科学考察, 又在内陆考察中引进了日本的多极化冰雷达系统。2015 年, 我国南极考察首架固定翼飞机配置了美国的HiCARS 航空冰雷达系统。2010 年后, 我国逐步开始自主研制极地冰盖深部探测和浅层FMCW 冰雷达系统, 两套系统分别在中国28 次(2011—2012 年)和29 次(2012—2013 年)南极科学考察期间进行了现场试验, 并多次用于南极冰盖的探测。其中, 深部探测冰雷达系统 HRISR 探测深度超过 3500 m, 浅层FMCW 冰雷达冰内垂向分辨率达到10 cm。2020年以来, 中国空间技术研究院等单位共同提出了TOPIS 天基极地冰盖观测技术概念。TOPIS 计划通过分布式星群编队的方式实现高空间分辨率的冰盖深部探测, 不过, 受电离层、地表杂波、雷达天线尺寸和功耗等多方面因素的制约, 天基冰雷达探测尚处于设计研制阶段。
尽管经过60 多年的发展, 冰雷达的性能得到了全面的提升, 类型呈现多样化, 但是随着应用研究的深入, 围绕极地冰盖的全面、精细化探测,除了进一步提升探测深度和垂向分辨率外, 其他新的需求和挑战也不断出现。基于现有冰雷达探测, 沿测线的数据分辨率已经达到米级, 甚至更高, 但在垂直测线方向, 数据分辨率主要依靠降低测线间距(大部分区域的测线间距超过了5 km),远远无法满足冰底环境和过程研究的需要。因此,亟待发展能够实现条带测量的冰雷达技术。在极地冰盖快速冰流区域、冰盖边缘裂隙发育区域和注出冰川区域, 由于雷达信号在冰盖表面和内部衰减非常严重, 加上这些区域通常无法抵达, 地面观测很难实现, 导致冰厚、冰下地形和冰底环境信息的严重缺失。因此, 研发基于有人机以及无人机平台的适用于此类区域深部探测的冰雷达技术, 有助于提升我们对极地冰盖的全面认识。未来, 依托大型和小型无人机平台搭载冰雷达开展极地冰盖、海冰和积雪的探测, 将是强化极地观测的重要方向。不过, 冰雷达系统的小型和轻量化, 雷达天线与无人机平台的耦合和适配, 系统功耗的降低等主要挑战, 仍是制约无人机载冰雷达应用的关键因素。星载极地冰盖深部探测冰雷达技术和无源(被动)冰雷达技术, 鉴于技术难度, 目前仍处于概念和方案的探索论证阶段, 将是未来冰雷达技术发展的重要方向。
猜你喜欢
军事文摘(2024年6期)2024-04-30 03:13:59
小哥白尼(趣味科学)(2022年5期)2022-08-15 08:34:32
奥秘(2022年6期)2022-07-02 13:01:13
参花(下)(2022年1期)2022-01-15 00:45:01
数学物理学报(2019年3期)2019-07-23 01:15:40
家庭影院技术(2018年9期)2018-11-02 05:31:32
水利规划与设计(2017年8期)2017-12-20 08:24:06
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
小学阅读指南·低年级版(2017年1期)2017-03-13 20:06:52