
高尔夫球回收机器人结构设计与仿真分析
2024-01-11 03:01:24王春玲陈自红王良燕王礼凡
黑龙江工业学院学报(综合版) 2023年10期
韦 明,王春玲,陈自红,王良燕,王 盛,王礼凡
(安徽三联学院 机器人工程学院,安徽 合肥 230601)
高尔夫球运动是利用高尔夫球杆将高尔夫球打进球洞的一项运动项目,传统的高尔夫球场多为人工夜间捡球,由于击打出的高尔夫球高速运动且散落不规律,人工捡拾费时费力,这就造成了捡球效率低下及高昂的人工成本[1],且球体落地速度较高,实时捡球的话容易对捡球人员造成伤害[2]。现有的球体自动回收设备通常是控制模块处理多个传感器的信号和指令来导航机器人[3],决策模块通过从背景草地中识别高尔夫球来规划路径实现球体的定位[4],但是球体的回收机械结构复杂,造价成本较高,且可实现的功能较少,捡球模式单一,回收效率低,实用性和可靠性不高,因此设计一种具有多种模式捡球的高尔夫球回收机器人。
1 模型结构设计
高尔夫球机器人主要结构由移动小车和回收装置两部分组成。移动小车采用线控和遥控相结合的控制方式,通过舵机驱动车轮行走。回收装置包括夹球机构、吸球机构、储存箱和锂电池;夹球机构定位安装在移动小车上;吸球机构抽吸管的吸球前端口定位安装在夹球机构的转动臂上,出球后端口延伸到储存箱内;储存箱上安装有抽风机,实现抽吸管对高尔夫球的抽吸;锂电池安装在车体内为各个装置提供电力,实现整个装置的无线运转、移动,操控更加方便。
本设计通过SolidWorks软件对高尔夫球机器人进行三维结构建模仿真,如图1所示。
1.1 移动小车的设计
本文所设计的高尔夫球机器人的使用场景为捡拾遗落在球洞内和散落在地表的高尔夫球,因高尔夫球场一般为较大的平原场地,且高速飞行的球体通常散落的范围较大,移动小车设计时应降低移动车体的中心高度来应对坡道行走[5];同时为了更好地进行对散落高尔夫球的定位收集,移动小车控制系统采用视觉SLAM激光导航控制技术。
1.1.1 移动车体
移动车体包括车架、车轮和伺服电机;车架宽度方向的两侧边分别与U型支架中间部固定连接,U型支架的两端固定设有伺服电机,并通过伺服电机来带动车轮转动。这样的结构设置可实现整个装置中心高度的下降,稳定性更好;但由于整个车体的外轮廓就相对变大,因此在设计时要注意移动车体的外轮廓尺寸,应避免和门框发生干涉。
如图2所示,高尔夫球场的一般为坡度在2°~3°的平整草坪地,过渡区域坡度可在5°~20°变化,因此采用20°坡度来进行爬坡分析。整车重量约为60kg,载荷40kg,车轮采用轮毂伺服电机驱动,由于移动车体爬坡时车速较低,可忽略空气阻力和加速阻力,简化车体模型后,以单个轮毂电机的满载承载力进行受力分析,车轮直径约260mm,根据理论力学平衡方程,对轮毂电机进行受力分析,并计算出轮毂电机的输出力矩,如式(1)所示。
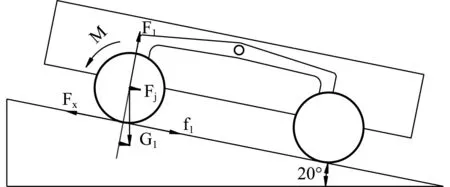
图2 移动车体爬坡简化示意图
Fx=f+Fj=kG1cos20+G1sin20=86.52N
(1)
式(1)中:Fx为车轮电机切向推动力;f为车轮滚动时的滚动阻力;Fj为坡道阻力;k为路面滚动系数,k1=0.014;G1为单个车轮的承载重力,G1=mg/4=(60+40)×9.8/4=245N,r轮为车轮半径。
可以解得轮毂电机的输出力矩,如式(2)所示。
M=Fxr
(2)
根据公式(2),可以计算出轮毂电机的输出力矩M=11.248N.m,因此选择型号ZLLG10ASM800-R V2.0的伺服电动轮,其额定扭矩为20N.m,最大负载300kg,且转向时采用差动驱动,可实现转向位移。同时车轮的外部均布凸起的耐磨橡胶防滑条,车轮与地面的摩擦力大,抓地力更强。
如图3所示,SLAM激光导航系统安装在小车前端的基座上,升降杆的底部定位安装在基座上,升降杆顶部设有容置盒,视觉SLAM激光导航装置设置在容置盒上[6-7]。
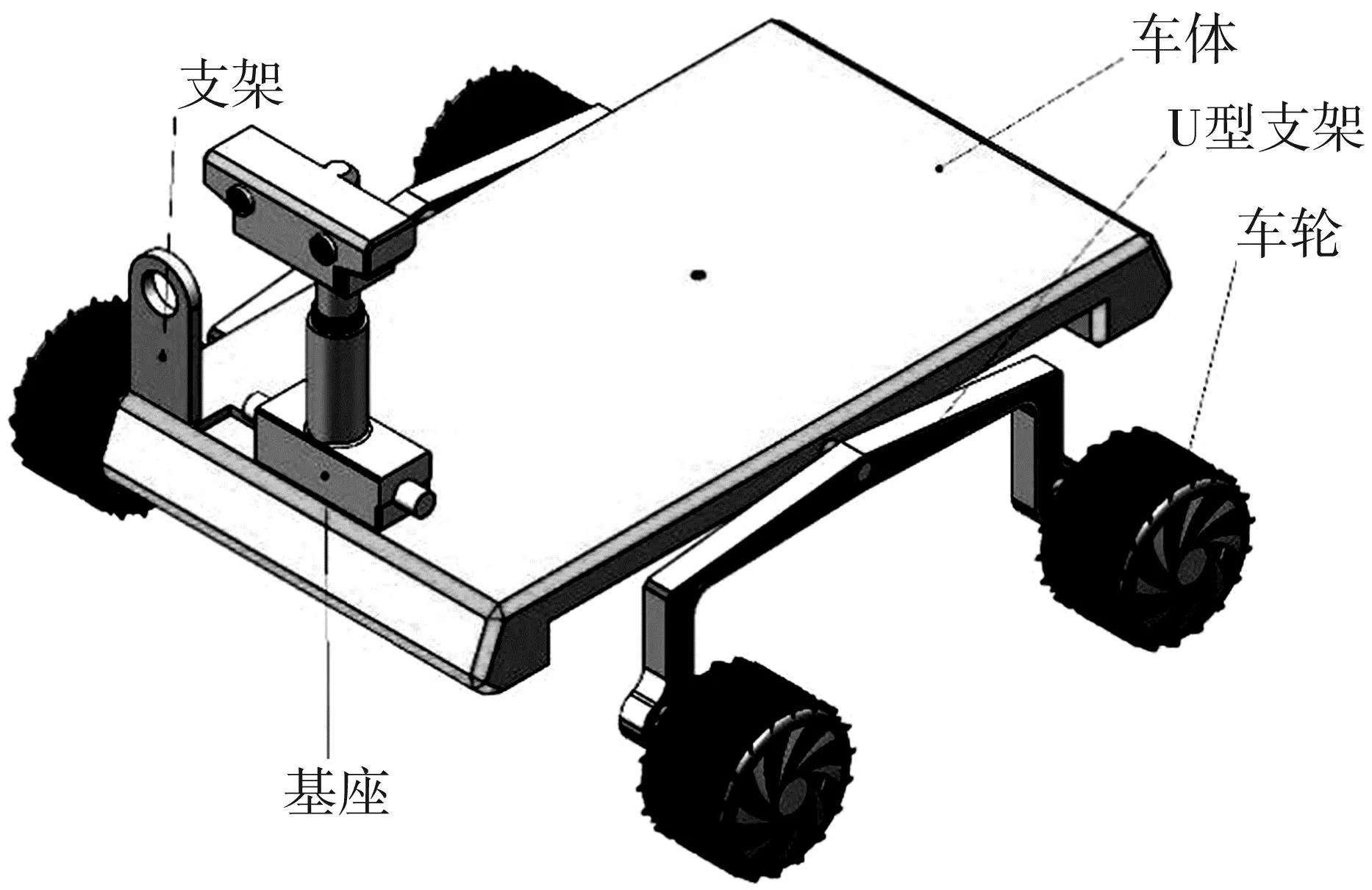
图3 移动车体结构示意图
1.2 回收装置的设计
高尔夫球是一种质地坚硬、富有弹性的实心白色小球。球的直径不得小于42.67mm,重量不得超过45.93g,所以特别适合通过吸力设备来吸取。回收装置通过在储存箱的后端定位设置抽风机,前端连通抽吸管,抽风时会使储存箱的后部形成负压,从而使靠近储存箱端的管道后部气压小于前部管道的气压,外侧管道的附近的物体就会被吸入储存箱的吸球腔内。
1.2.1 储存箱的设计
如图4所示,储存箱的一侧设有与吸球机构对应的中空腔体;储存箱的另一侧与夹球机构对应设置,顶部开口箱体结构与夹球机构的后部对应设置;箱体结构的后部设有隔断层,可用于放置高尔夫球杆;前部用于放置抓取的球体,且内置提篮,可实现对收集的球体集中拿取,更加方便工作人员整理,设计合理。

图4 储存箱结构示意图
1.3 夹球机构的设计
如图5所示,夹球机构包括转动臂和夹持头;转动臂包括基座、后臂和前臂,基座固定设在移动小车的车架顶面前端,后臂的后端部通过驱动电机一定位安装在基座上,来实现后臂在移动小车长度方向前后转动。后臂的前端固定设有驱动电机二,驱动电机二的转动轴固定在转接块的一侧边。驱动电机三的转动轴安装在转接块的另一侧边,并与驱动电机二垂直设置,来实现前臂在移动小车长度方向前后转动。前臂的头端安装夹持组件,实现夹持组件在转动臂的带动下前后位置调整,可实现对高尔夫球的捡拾和直接放入储存箱内。夹持组件为剪刀型运动夹持机构,通过转动电机驱动两夹持头相对转动夹紧高尔夫球,并将球体夹持到储存箱的开口上方放球[8]。
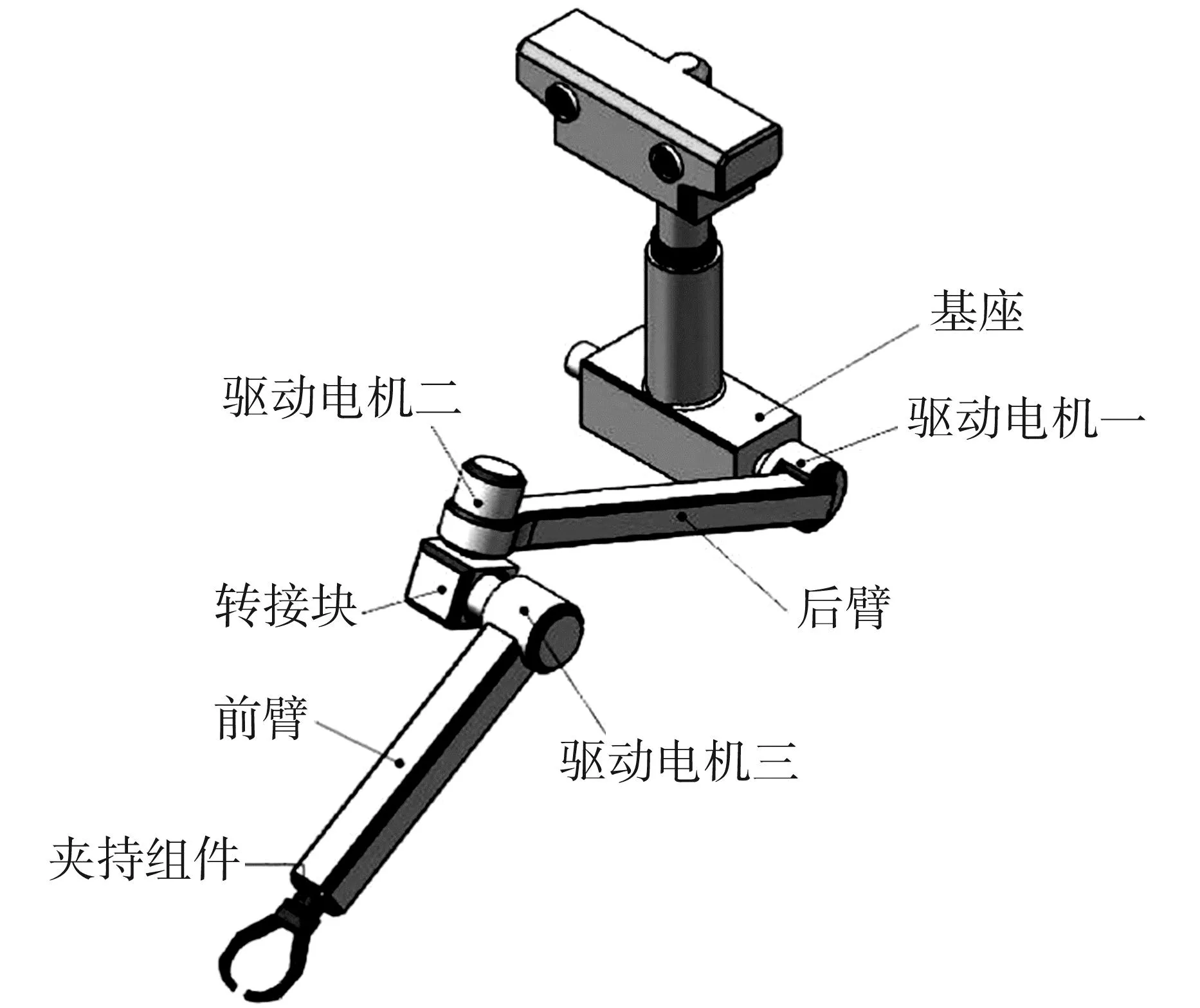
图5 夹球机构结构示意图
1.4 吸球机构的设计
如图6所示,吸球机构包括抽吸管、支架和抽风机。抽吸管的前端为漏斗状,方便吸入高尔夫球,且整个管体结构的两端为硬质材料,中间为可伸缩变形的波纹管体结构,不会影响转动臂的实际转动操作。抽吸管的前端通过卡箍定位安装在转动臂上,并与前臂轴向定位平行设置;抽吸管的后端通过抽风机与储存箱上穿孔定位对接安装,通过抽风机的抽风作用,来实现抽吸管的吸力,使球体通过抽吸管进入到吸球腔内。
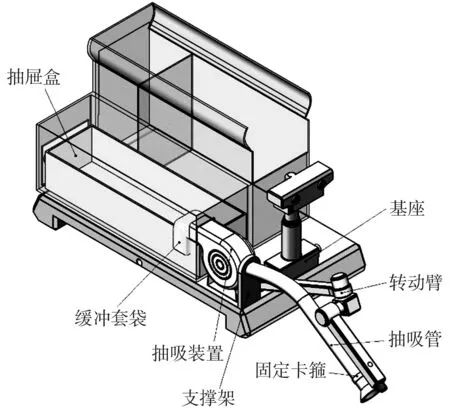
图6 吸球机构结构示意图
抽吸管后端出口处还可连接软套袋,在喷入时球体经过软套袋时,依靠软套袋对其冲击力进行缓冲,减少球体的弹跳力。抽屉盒设在吸球腔内,抽屉盒靠近抽屉口的一端连接有凸柄,当需要取出拾取的球体时,直接依靠凸柄拉动抽屉盒滑出来实现对抽吸的高尔夫球进行拿取,同时抽吸管的后端还设有计数器,可实现对收集高尔夫球的计数。待达到一定数量后,停止吸球工作的各类装置,打开储存箱拿出抽屉盒并更换新的,收集更加方便、快捷和高效。
2 运动控制设计
如图7所示,智能高尔夫球自动捡球机器人控制系统主要包括导航避障模块、图像采集处理模块和捡拾机构控制模块。图像采集处理模块对采集图像处理,并将提取出高尔夫球的靶信息传送到下位机,下位机将根据路径导航模块的计算路径移动,并控制捡拾机构控制模块运行。具体运行流程为:首先高尔夫球检测和定位模块获取原始RGB图像和深度图像数据,从RGB图像中检测出高尔夫球,然后根据深度图像计算出高尔夫球在全局坐标系中的坐标,并输出坐标点集;捡球路径规划模块获取坐标点集后,根据球的个数使用相应的算法进行最短遍历顺序规划,输出规划的顺序[9];最后导航避障模块获取遍历路径,进行全局路径规划和局部避障,执行捡球任务[10]。
3 关键部件的运动学仿真分析
3.1 夹球机构的运动分析
夹球机构的转动臂结构可简化为二连杆串联结构,通过Solidworks motion对四自由度的转动臂进行了简化仿真分析。转动臂可简化为后臂和前臂的相对转动联接,所以仅需分析在转动臂转动的平面内的运动轨迹,其他方向的自由度可认为被约束。建模过程中将转接块看做后臂与前臂的回转链接轴,通过球体转动臂结构的绕轴摆动运动,带动高尔夫球朝着储存箱上部开口上方来实现球体的捡拾。
如图8所示,后臂和前臂的臂长均为500mm,考虑到一体式的抽吸管定位安装在转动臂上。由于抽吸管的波纹伸缩限制,以基座与后臂的转动轴为原点,在转动平面内,设定后臂与X轴的转角范围为:q1∈[60°,90°],设定前臂与X轴的转角范围为:q2∈[-30°,180°]。
(a)拾球时转动臂状态图
如图9所示,仿人转动臂初始拾球位姿态时q1=60°,q2=-30°;最后放球姿态时的q1=90°,q2=180°。夹球机构的转动臂结构机械臂与X轴的最大张角为180°,且机械臂的夹持头的运动范围为2313mm。机械臂的移动轨迹范围较大,能够实现对球体的取放,为实现机械臂的多功能提供了良好的基础,更加可靠。

图9 转动臂拾球示意图
3.2 吸球机构的流体分析
吸球机构的抽吸管为内径约为60mm的塑料可伸缩软胶管,导向抽吸管在抽风机的作用下,通过强力风扇即可实现高尔夫球的吸取,由于导向抽吸管的抽吸角度通过转动臂带动来实现竖直和倾斜的调节,所以风力将高尔夫球体自地面吸进管道内,根据理论力学平衡方程,对球体进行受力分析,并计算出风扇的排量[11],如式(3)所示。

=45.93×103×9.8=0.45N
(3)
式(3)中:F风为风作用力;ρ为标准大气压下的空气密度,ρ=1.2kg/m3;ν为风速,CF为风阻系数(球体取0.5);A为管道截面迎风面积,A=πr管2,r管为抽吸管的半径,考虑到漏气的情况,k2=1.5;g=9.8N/kg。
可以解得使高尔夫球顺利被自下向上吸取的最小风速如式(4)所示。
(4)
因此选用风扇的最小排量如式(5)所示。
(5)
根据公式(5),可以计算出风扇最小的排量V≈5.86m3/min,因此选择型号150FLJ7~220V/240W的工频离心风机,其转速为2800r/min,风量为9m3/min,并通过电流转化器与车体蓄电池连接来实现供电。
如图10和图11所示,吸球机构可简化为导向抽吸管的出口端、抽风机和吸球腔形成一个完整的抽吸通道,通过Solidworks Flow Simulation对该机构内的气流进行流体速度模拟分析[12]。离心风机在无其他干扰全速运转时,根据软件模拟的流动迹线可知抽吸管的前端开口的风速最低为71.01m/s,约为高尔夫球被自下向上吸取的风速的3倍;同时自抽吸管前端向后的速度均大于前端的风速,通过至少50次的迭代后整体波动较为稳定,因此整个吸球机构的吸取效率和稳定性较高。
图10 抽吸管竖直状态的气流速度仿真示意图
图11 导向抽吸管倾斜90度气流速度自外向内的曲线图
如图12所示,软套袋并不会影响抽风机抽吸小球的效果;为了高尔夫球顺利落到抽屉盒内,在抽吸管的末端设置复位挡板、计数器和OpenMV摄像头,通过调节OpenMV摄像头的颜色阈值来实现对白色高尔夫球的识别,并通过识别计数器将检测到的高尔夫球数反馈给处理器,从而实现对高尔夫球收集数量的实时计数。局部采用视觉导航的动态窗口路径规划保证捡球效率[13]。
图12 抽吸管吸球示意图
4 结论
本文研究了一种多功能高尔夫球捡球机器人,在设备执行捡球任务时,可直接通过夹球机构来进行捡球;亦可通过吸球机构来进行捡球,可实现抽吸的管道角度的调节,不需要通过机械臂和机械爪配合来抓取和放置球体,相对实际机械臂的来回操作更加简单,且大大提高了拾取效率;亦可通过夹球机构和吸球机构来同时捡球;在出现夹在角落的球体不好收集的情况下,可先通过夹球机构将球体夹出,然后置于吸球机构前,依靠吸球机构吸走,完成捡球,根据不同情况切换不同拾取模式,通过多种不同原理的收球机构的切换和调整,大大提高了高尔夫球回收机器人的可靠性,使用和调节方便,大大提高了高尔夫球自动捡拾的效率。整个装置的结构更加简单,结构紧凑,空间利用率高,具有很好的实际应用前景,值得广泛推广。
猜你喜欢
发明与创新·初中生(2024年2期)2024-04-30 00:00:00
现代装饰(2022年2期)2022-05-23 13:14:38
消费电子(2020年5期)2020-12-28 06:58:27
创新作文(小学版)(2018年22期)2018-11-30 01:57:46
童话世界(2018年10期)2018-05-10 09:46:45
池州学院学报(2017年5期)2018-01-23 02:54:31
中国公共安全(2017年5期)2017-09-04 03:22:35
Chinese Journal of Chemical Engineering(2016年10期)2016-05-26 09:28:34
发电设备(2014年4期)2014-02-27 09:45:33
文苑(2011年11期)2011-08-09 05:24:30
