
玉米精量播种区段控制技术研究现状
2024-01-09 02:24颜丙新武广伟李汉青肖跃进梅鹤波董建军孟志军
农机化研究 2024年1期
凌 琳,颜丙新,武广伟,李汉青,肖跃进,梅鹤波,董建军,孟志军
(1.广西大学 机械工程学院, 南宁 530004;2.北京市农林科学院 智能装备技术研究中心,北京 100097;3.东北农业大学 电气与信息学院,哈尔滨 150030)
0 引言
玉米精量播种区段控制是将多行播种机以一行或多行为一个区段,按照作业需求,基于既定策略实现各区段独立控制的技术,可以实现不同区段排种启停状态的差异化控制和播种量/株距的差异化调节,从而节约良种,解决地块内重复作业的问题,实现播种作业全区域植株密度均匀一致。随着党中央对节粮减损工作的重视,加强粮食全产业链各环节节约减损逐渐成为共识,玉米精量播种区段控制技术因其具有节粮增产的优点,将逐渐成为研究热点。
随着我国精量播种技术的发展和普及,播种株距一致性和密度均匀性得到了提高,玉米播种质量也得到了改善;但地头播种行参差不齐,地块边界机具不满幅作业,且传统播种作业方式存在重复作业等问题。Velandia等[1]研究发现:重复作业面积占总面积的0.1%~15.5%,且重复作业区域种植密度显著高于正常作业区域,超过最佳种植密度会降低植物生长速度,造成良种浪费与产量损失[2-4]。Rahman等[4]研究发现:重复作业会浪费多达9.58%的良种。Corassa等[5]发现:玉米产量损失与重复作业面积呈线性关系。由此可见,重复播种作业已经成为制约玉米播种质量提升的重要阻碍。区段控制技术有利于减少重复播种区域,改善播种密度,提高经济效益。Troesch等[6]指出,区段控制能减少1%~8%的重叠作业区域。Fulton等[7]研究表明:仅使用播种区段控制技术,平均节省4.3%的种子成本,配合农机自动导航,可节省3%~35%。Stombaugh等[8]指出,在特别奇异的地块可减少25%的成本。爱荷华州立大学[9]的数据表明,重复播种区域会造成12%的产量损失。
区段控制技术早期依赖手动离合器控制排种,效率与经济性不高。随着全球定位技术与电子技术的发展,区段控制变得更为精准与智能化,2000年后出现了基于GPS的离合器自动控制方案,并逐渐形成以电机为主流的自动区段控制体系[10-12],滞后补偿、地形补偿、转弯补偿成为普遍的提高区段控制精度的方法,与农机自动导航、自动转弯及单体自动提升等技术相配合的区段控制极大地挖掘了播种过程中节本增益的潜力。
欧美发达国家于20世纪30年代对精密播种技术展开了研究[13],对播种区段控制技术已经有了充分研究,现已发展成一种常规技术,在玉米播种中广泛使用,其受欢迎程度仅次于自动导航、自动转弯和作业监测技术[14]。John Deere、Case IH、AGCO等公司都推出了区段控制前装产品,John Deere[15]针对Pro-Shaft单体驱动单元开发的RowCommand系统,通过EPM(Eletronic power modules)模块控制离合器,系统最多能拓展至16个区段,可实现弯道播种区段控制。Case IH[16]的AFS耕作系统兼容ISO 11783,适用所有ISOBUS作业机具。另外,Ag leader、Pricision planting、Raven等公司都推出了多种播种机后装区段控制方案[17]。区段控制效果如图1所示。

图1 区段控制效果Fig.1 Section control effect
国内播种区段控制研究相对较少,孙楠[18]设计了一种离合器,通过调节离合键实现余行停播,改善余行重播的情况。魏剑涛等[19]发明了一种基于已工作区域的农具区段控制方法,采用向量多边形记录农具作业区域,通过四分树数据结构存储和检索已作业区;当区段在已工作区时,停止区段作业,防止重叠作业。但是,目前国内玉米播种仍以机械式播种机为主,依赖人为调节机械式离合器的区段控制因费时费力而很少使用,地头播行参差不齐与地块余行不满幅造成的重、漏播情况仍普遍存在,良种与产量均存在损失。随着现代精细农业的稳步发展,玉米产量供不应求的形势愈发严峻,作物种植将由机械化向智能化方向发展,玉米播种区段控制技术因其智能化程度高、潜在经济效益好的优点,将得到高度关注与广泛应用。
玉米精量播种区段控制技术的重点是在准确定位已播种区域的前提下,实现区段位置精准获取和区段精准独立控制,确保全区域处在最佳播种密度。为实现精量播种区段控制,首先必须获取种子着床预测位置,然后与地块区域进行位置关系判断,最后根据判断结果控制相应区段排种启停。本文围绕播种区段控制过程,综述种子着床定位、位置关系判断和排种启停控制3个环节的主要研究内容,总结播种区段控制关键问题,探究我国玉米播种区段控制技术研究方向。
1 种子着床定位
区段控制需要实时感知种子位置,确定种子与地块的相对位置关系,同时生成种子覆盖图,更新已播区域,反应播种情况。在大田作业中,种子着床定位数据共享是多机协同、高效作业的基础[20],气压、种子种类、排种盘转速等都会影响播种误差[21],种子着床点存在较大的随机性,精确定位困难。当前,研究基于RTK定位技术,以单体位置对种子着床位置进行预测。MR Ehsani等[22]将RTK-GPS设备安装在单体上,基于单一天线多单体定位模型与定位数据插值方法,获取低位安装的光电传感器触发时刻的单体位置,以单体位置为种子着床位置,位置误差在30~38mm。颜丙新等[23]在MR Ehsani的基础上提出一种基于高位检测的精播种子着床位置预测方法,避免低位检测传感器易被土壤、颗粒等遮挡的情况,并基于EDEM数值模拟和动态仿真,构建种子着床位置补偿模型,实现玉米种子着床预测位置精确至厘米级。NORREMARK等[24]提出了一种提高定位精度的方法,利用另一光电传感器检测已知位置的标识,修正定位数据,同时使用接收机提供的航向与倾斜计提供的俯仰、横滚角后处理定位数据,进行地形补偿,修正定位数据,相比未补偿数据,平均偏差减少了60%。
文献[22-24]实现的是当前检测种子的预测位置,但导种管中的种子以种子流的形式存在,区段控制不仅需要当前种子着床位置生成种子覆盖图,还需要对后续种子位置做出预测,避免区段控制产生启停滞后距离。孟志军等[25]基于落肥分析,建立位置滞后模型,田间试验表明:位置滞后模型能较好地估算时间延时。Zhao等[26]提出了一种航迹推算方法,基于速度与排种延时预测种子着床位置,降低滞后距离,平均滞后距离为63.4cm,相比于非航迹推算方法,平均滞后距离小于72.2cm。HE等[27]基于室内台架试验中高速摄影测定的延时时间,结合航迹推算实时补偿,平均滞后距离为0.57m,滞后距离变化在0.07%~0.63%之间。
上述研究均基于天线与单体固定位置模型且直线播种情况下,弯道播种场景下,内外单体速度存在差异。Strasser[28]在模拟种植场景下对电驱排种器进行弯道播种测试,电机转速误差在-7.2%~7.9%之间。天线定位点与单体位置也并不固定,因此HE等[29]提出了一种基于GPS的转弯补偿算法,将GPS接收机的定位点、速度与航向转换为播种机牵引点的对应数据,进而求解各单体的位置。在产品化方面,滞后、地形与转弯补偿等已经得到了广泛应用。Pricision planting[30-31]的20|20系统设置播种启停偏差时间,校准区段控制的种子定位点,且提供陀螺仪与GPS组合方式实现转弯补偿,如图2所示。
John Deere[32-33]终端在设置延时与地形补偿的基础上进行田间标定试验,利用垂直进出已播区域的滞后距离及对应速度对区段控制进行调优,如图3所示。

图2 Pricision planting区段控制补偿设置Fig.2 Pricision planting section control compensation setup
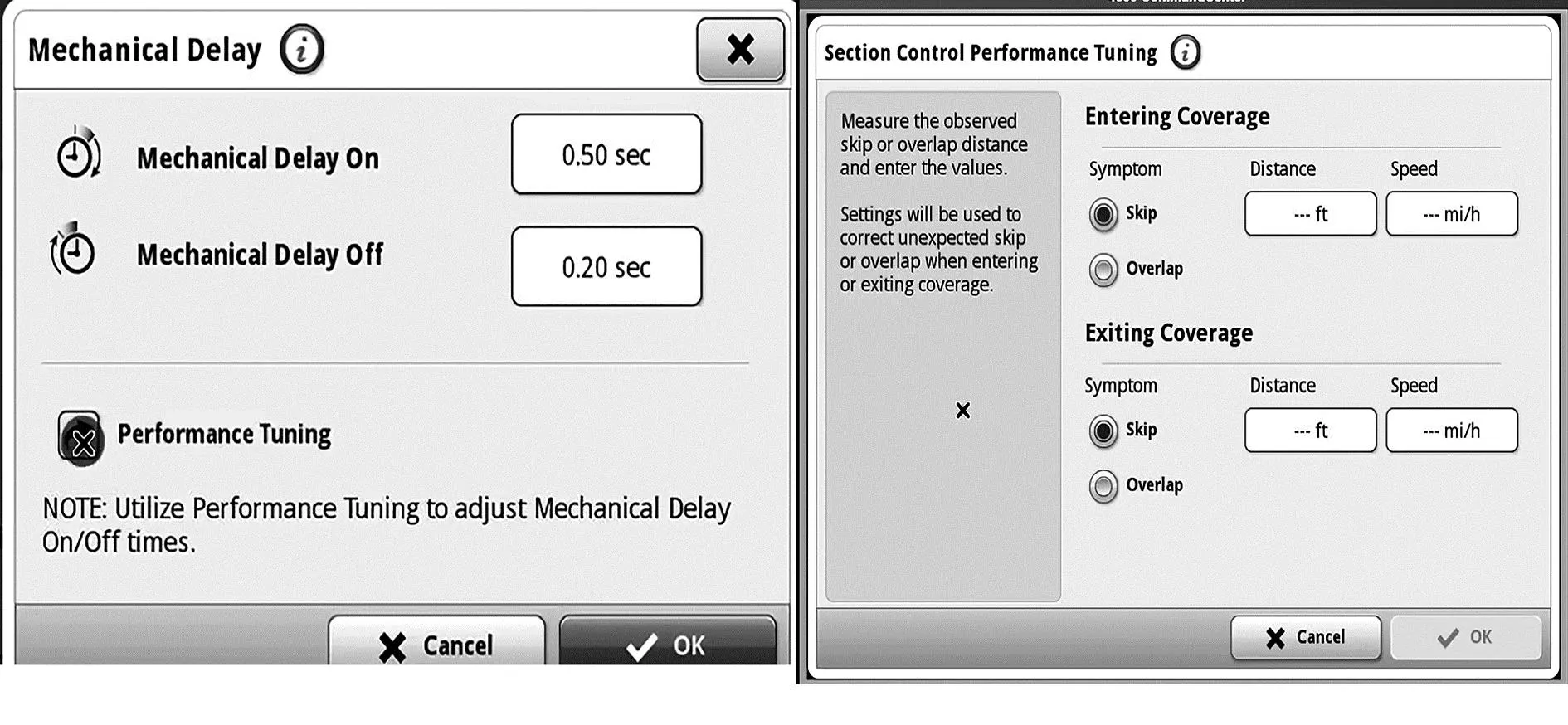
图3 John Deere区段控制补偿Fig.3 John deere section control compensation setup
2 位置关系判断
区段控制系统需要实时判断待播种子的着床位置是否处于播种区、已播种区或非播种区,根据判断策略进而控制排种启停。实际作业中,受控制器性能限制或区段控制精度需求影响,常以多个播行为一个区段进行控制,通常以该区段中种子预测位置点连线上的某一点作为基点参与运算。由于地块边界在计算机中常以依次相连的若干定位点组成的多边形表示,因此待播种子位置或区段基点与地块区域的位置关系判断可抽象为点与多边形的位置关系运算。
多边形内外点判别算法是图形学中的基础算法,是地理信息系统空间数据分析功能的基础。常用的典型判别方法有射线法(奇偶规则法)、角度和法(累计角度法)及非零环绕数规则法等。其中,射线法为最基本有效的方法[34-35],但其存在射线过端点、射线与边界重合等多种奇异情况,且传统射线法存在大量求交运算,故实际运用中常需对射线法进行改进[36-38]。谢东岑等[36]添加缓冲距离的判断解决了传统射线法中射线过多边形某一边或端点的奇异情况,实现了无人机地理围栏越界探测。郝建强等[35]基于有向线段正负性原理改进射线法,并提出了并行算法,提高了运算效率。
在精准农业中需要对地块进行网格划分,以便因地制宜地收集田间状态信息和实时变量输入[39]。在作业过程中,作业区域的网格属性实时更新,网格识别易同时实现种子与地块边界、已作业区等多区域的位置关系判断,因此受到了广泛关注。于英杰等[40-41]基于传感器定位方式设计了地块网格识别方法,适用规则与非规则地块。魏剑涛等[19]将已作业区域划分为若干网格,基于四分树数据结构存储与检索已作业区,采用非零环绕数规则法判断已播区域。Borut Žalik等[42]提出了基于网格法的点集在多边形内外的方法,实现了大量点的网格判断。
也有学者借助地理信息系统直接进行农机具与地块位置关系判断。孟志军等[25]利用嵌入式GIS组件,设计了实时施肥处方图识别算法,识别处方归属的时间不超过100ms。魏新华等[43]基于eSupermap 6.0 嵌入式GIS开发平台研制的处方农作车载嵌入式信息处理系统通过坐标匹配,实现机组当前作业位置在工作空间图中的网格识别,3km/h作业速度下的网格判别误差约为-0.5~0.6m。刘子文等[44]在魏新华等研究的基础上进一步将判断误差缩小在±0.5m以内。
在产品化方面,相关企业提供配套软件实现地块网格化,Ag leader[45]提供SMS软件制作地块电子地图并支持处方图制作,配套InCommand终端实现地块网格信息识别,最终达到变量播种与区段控制的目的,如图4所示。

图4 电子地图制作与播种演示Fig.4 Ag leader map design and seeding demonstration
3 排种启停控制
排种启停控制是播种区段控制的重点环节,其与排种驱动方式发展密切相关。目前,排种启停控制主要为离合器、液压马达、电机及调节阀4种方式。
3.1 离合器
离合器是最早的区段控制方式,主要用于具有中间传动机构的播种机。根据安装的位置可以实现排种器的集中、独立控制:当安装在动力源与中间传动机构之间时,可以实现多个排种器的集中控制;当安装在中间传动机构与排种器之间时,可以实现排种器的独立控制。Tru Count[46]的气动离合器能实现排种控制(见图5),充气使通道内的顶针卡在橡胶圈内挡环上,固定在橡胶圈上的扭簧受力压缩,连轴盘与外套脱离传动,实现排种启停控制。气动离合器的执行机构小,可安装在传动链多个位置,但需要压缩机、储气罐等外设,故Tru Count[46]也推出了电动离合器,改善了这一情况,如图6所示。
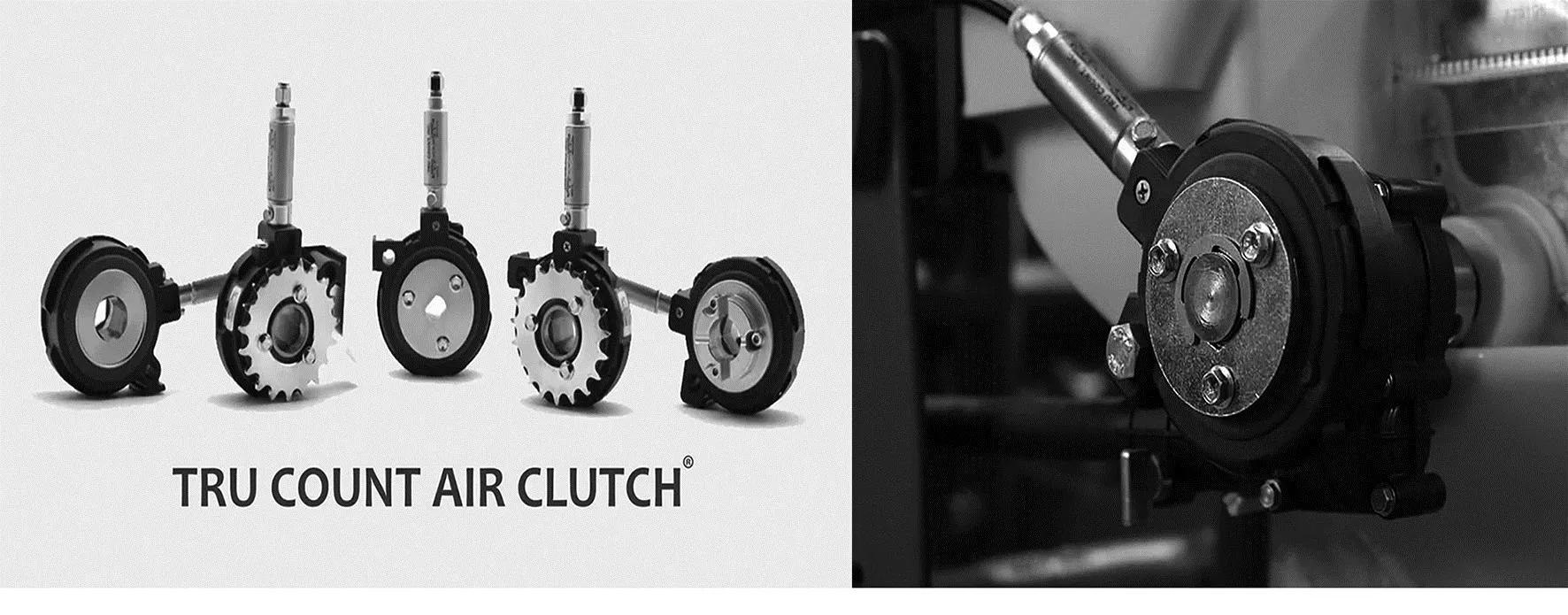
图5 Tru Count气动离合器Fig.5 Tru Count air clutch

图6 Tru Count电动离合器Fig.6 Tru Count electric clutch
John Deere[15]公司推出的RowCommand系统直接对柔性轴进行控制,采用低电流电动离合器控制排种动力传递,如图7所示。

图7 John Deere柔性轴离合器Fig.7 John Deere flexible shaft clutch
离合器采用切断动力的方式实现排种控制,在早期区段控制中起到了至关重要的作用,但随着播种驱动方式的改善,逐渐被替代。
3.2 液压马达
传统的地轮驱动方式随着作业速度增加,地轮滑移率及链传动不稳定性都会上升[47],且株距调整不便。自20世纪80年代起,出现了液压马达代替地轮驱动的方案,改善了播种质量,也改变了区段控制方式。John Deere公司[48]用液压马达驱动主轴,通过比例流量控制,实现排种器实时转速控制,可手动或由控制终端实现区段的独立控制,如图8所示。

图8 John Deere液压马达及区段控制Fig.8 John Deere hydraulic motor and section control mode
Raven公司[49]的OmniRow液压马达直接驱动中间轴,通过修改中间轴,也能实现排种器独立控制,如图9所示。

图9 OmniRow液压马达及安装方式Fig.9 OmniRow hydraulic motor and installation method
液压马达易于实现启停控制,但需要接入液压系统,工作过程中有较多的能量损失,维护也不便。
3.3 电机
电机相对于液压马达,能够直接驱动排种器,省去了长距离中间传动环节,具有结构简单、体积小、控制精度高,易维护的特点,不仅能保证播种的质量,还能实现区段控制,也是变量播种的最优方案。
Precision Planting[50]针对vSet排种器推出的vDrive电机模块,通过齿轮啮合的方式驱动排种,缩小了排种器的整体尺寸,配合20|20 SeedSense控制器可实现区段控制功能,如图10所示。
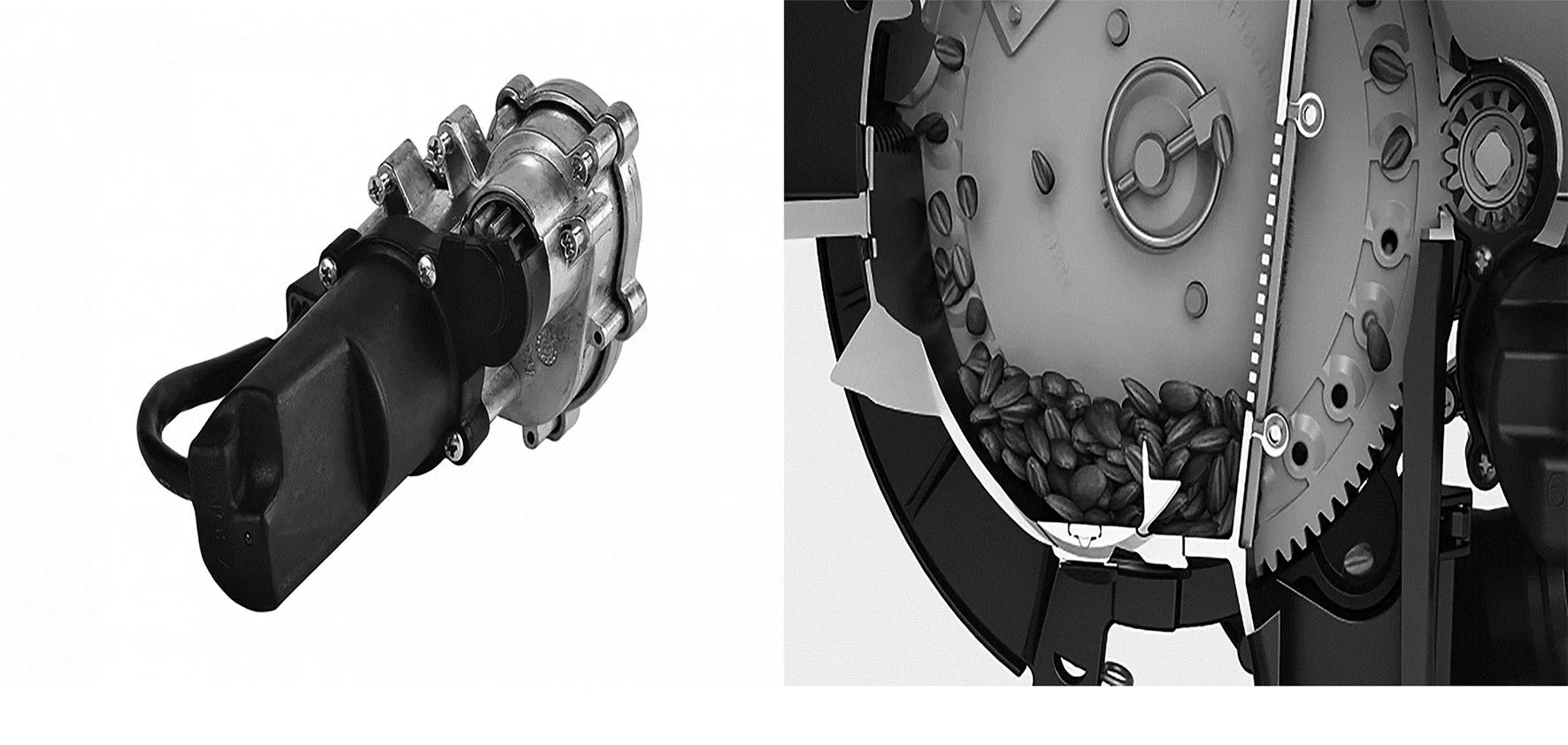
图10 vDrive电机模块及传动方式Fig.10 vDrive motor module and transmission
Ag leader[51]的SureDrive电机不同于vDrive仅适配vSet系列产品,还能适配Kinze 2000/3000系列、vSet、Monosem NG4+等众多排种器,采用链、齿传动减速组驱动排种器主轴,通过SeedCommand系统实现区段控制,如图11所示。

图11 SureDrive电机模块及传动方式Fig.11 SureDrive motor module and transmission
3.4 调节阀
调节阀是以排种器特性研发的区段控制方式,主要从种子吸附、导种环节实现排种启停控制。当前的调节阀主要针对气力式排种器,以中央集排式排种器和气吸式排种器居多。中央集排式排种器利用多行型孔的滚筒实现一器多行的排种方式。工作时,气流将种子经输种管直接抛入种床,降低了机具振动对排种的影响[52];现有的区段控制方式通过在输种管中串入可控的调节阀,截断种子并使其从第三通道回流至种箱,达到区段控制的目的。
Farmet[53]推出的区段控制系统,采用三通的结构,通过气压膨胀鼓膜停止输种并使种子回流,如图12(a)所示。Mc Electronic[54]设计的TCS 32电动三通阀,在不需要破坏其原有输种装置的基础上,串入输种管,通过电机旋转实现通道改变,如图12(b)所示。

(a)Farmet区段启控制结构 (b)TCS 32三通调节阀结构图12 中央集排式排种器区段控制方式Fig.12 Centralized seed-metering device section control method
气吸式排种器依靠负压吸附种子,排种盘旋转种子至投种区,种子最终投入导种管中,完成排种过程。气吸式排种器可以由地轮驱动,也可由电机、液压马达驱动,除前文所提启停控制方式外,Agleader[55]推出的SureVac电动切断器通过电磁阀驱动挡板遮挡排种盘型孔,使种子在携种区失去负压,种子在重力作用下回落充种区,达到停止排种的目的,如图13所示。
图13 SureVac电动切断器Fig.13 SureVac Electric Disconnector
调节阀从排种器特性入手,有效实现区段控制,尤其是改善了中央集排式排种器播行的独立控制,但适用范围相对单一。
4 关键问题
精确位置播种是玉米播种区段控制的关键问题,而影响精确位置播种的核心因素是定位、延时与测速方式。
4.1 定位
定位是区段控制系统感知边界、种子位置的基础。精确定位以RTK技术为主,能提供厘米级定位,但受地形与点状信息的影响,定位数据存在较大的变异,当前研究与应用证明定位数据插值补偿、滞后补偿与地形补偿能提高区段控制的精度。另外,RTK定位受环境干扰易丢失信号,需要辅以航迹推算等方法,保证在RTK信号丢失后仍能够得到一定精度的定位数据,使区段控制能够正常运行。
4.2 延时
延时是影响区段控制效果的重要因素,区段控制系统中定位源数据获取、发送、解析及位置关系运算、控制模块响应、落种等延时都会产生滞后距离。首先,获取到的定位实际上是一个定位解算周期前的定位数据;其次,位置关系运算时间取决于算法的优劣与算力的强弱;最后,根据计算结果启停排种器,启停控制模块受限于自身结构、性能特性存在响应时间,这造成了实际落种滞后于理论落种点,在高速播种时,滞后情况更为严重。因此,在区段控制中缩短延时,获取准确延时是提高区段控制效果的有效方式。采用延时补偿模型能较好地预估延时时间,且位置滞后补偿与转弯补偿能进一步缩小滞后距离。
4.3 测速方式
测速方式直接影响速度的准确性,速度偏差将在系统延时下造成位置偏差,故高精度的测速方式是保证区段控制效果的基础。测速方式分为基于轮速测速方式与基于地面测速方式。其中,基于轮速测速方式主要利用编码器等传感器测量车轮轴的旋转速度,最终转换为车轮线速度。由于传感器分辨率、轮胎与地表的不同接触状况导致的地轮滑移、胎压等多种因素的影响,该类测速方式并不够准确,无法满足高精度需求。基于地面测速方式包括GNSS、雷达及IMU,其以一固定参考点,衡量被测对象相对于参考点的速度,避免了地轮滑移的影响。其中,GNSS测速方式便捷,但受卫星信号、接收机性能的影响,存在较为明显的延迟,输出的速度值变异系数较大;雷达测速受田间残茬干扰,测速精度会有所降低;IMU实时测量,瞬时测量精度高,但累计误差大,难以满足长时间测速需求。由于单一测速方式存在不足,组合测速方案成为了高精度测速方案的首选。
5 讨论与建议
国外针对玉米播种区段控制的研究较为完善,我国玉米播种区段控制技术的研究相对滞后:一方面,国内精密播种技术起步较晚,技术相对落后;另一方面,国内人均耕地面积较少,分散、小规模作业占多数,成本回收周期长,且农民的受教育程度低,对新事物的接受能力较弱,造成了玉米播种区段控制技术难以得到发展、实践的现状。随着规模化生产进程的加快,大面积集中种植将会成为常态,区段控制潜在经济性将得到充分的体现,将推动玉米播种区段控制技术的发展。现阶段我国播种作业已与农机自动导航密不可分,区段控制技术与自动导航技术存在相当多的技术共性,给国内播种区段控制技术的发展奠定了基础。结合当前形势与当前区段控制的发展,提出我国未来区段控制的发展趋势:
1)在现有变量播种研究中,实现地头边界与已播种区的精准识别,完成区段控制与变量播种技术融合。
2)以现有保有量大的机械式播种机开展区段控制化研究,研制出低成本、高效、自动化的后装设备,降低用户的二次投入成本与操作难度,加快我国播种区段控制技术应用。
3)针对多系统相互独立工作情景,开展农机自动导航、排种监测与播种区段控制等多系统协同作业的研究,进一步缩小播种重叠区域,提高播种作业效率。
猜你喜欢
农业机械学报(2022年9期)2022-11-08
农机科技推广(2022年8期)2022-09-16
新疆农机化(2022年1期)2022-03-02
云南画报(2021年11期)2022-01-18
时代农机(2019年5期)2019-02-11
农业工程学报(2018年24期)2019-01-14
铁道通信信号(2018年8期)2018-11-10
铁道通信信号(2018年8期)2018-11-10
农业工程学报(2017年17期)2017-11-01
铁道通信信号(2016年4期)2016-06-01
