
异构无人潜水器水声通信技术发展综述
2024-01-08 03:53童峰周跃海陈东升李姜辉张小康
哈尔滨工程大学学报 2023年11期
童峰, 周跃海, 陈东升, 李姜辉, 张小康
(1.厦门大学 海洋与地球学院, 福建 厦门 361005; 2.厦门大学 导航与位置服务技术国家地方联合工程研究中心, 福建 厦门 361005; 3.厦门大学 近海海洋环境科学国家重点实验室, 福建 厦门 361005)
随着海洋资源勘探、环境监测、油气开发、国防安全与权益维护等各领域对海洋信息获取、传输的需求迅速增加,海洋信息技术成为推进海洋强国建设的重要支撑[1-6]。作为快速发展的水下移动平台,各类无人潜水器因其机动灵活、可搭载多种功能载荷,如海洋要素传感器、侧扫声呐、定位基阵、高分辨率相机、声学传感器、水流剖面仪、采样器等,且能适应复杂水下环境,因而在多样化海洋任务中得到了广泛应用[2]。
以自主式水下航行器(autonomous underwater vehicle, AUV)、水下滑翔机(underwater glider, UG)、波浪滑翔器(wave glider, WG)等为典型代表的异构无人潜水器平台的迅速发展与定型成熟,使得移动组网观测具备了可扩展的条件,能够执行更复杂、更智能、持续时间更久、覆盖范围更广的任务,已经成为近海、远海观测与探测的重要手段[2,7-8];同时,AUV、滑翔机、波浪滑翔机等不同无人潜水器平台在功能、特点、载荷、适用范围存在差异和互补性,使得采用异构平台的组网逐渐成为海洋观测探测技术发展的一种趋势,相关技术的研究也成为重点[2]。
水声通信是水下通过声波实现的无线信息传输技术[10-12]。具体地,水声通信设备通过在发送端把信息加载在声波上,声波通过水介质把信息传输到达接收端后,利用解调处理将信息从声波分解出来,从而完成水声通信过程。
无人潜水器平台的运动控制、信息互传、协同等的实现则需要稳定的水声通信链路来支持,目前通常采用通用水声通信机,或研发专用水声通信机的方式。考虑到异构无人潜水器由于具有不同的工作模式、航行状态、平台构型、适装要求等特点,与之相应的水声通信成为当前研究热点和前沿。近年来国内外开展了相关研究并在模型方法理论、技术系统实现及工程试验示范等方面取得了长足的进展[10-11]。
本文对异构无人潜水器水声通信现状及发展趋势进行梳理。
1 异构无人潜水器水声通信面临的挑战
作为水下无人移动平台,无人潜水器水声通信面临着独特的挑战和风险[13-16]。首先,水声信道尤其是浅海信道传输特性较为恶劣,具体表现为时变多径、潜水器移动导致多普勒、信道变化性大以及宽带有限等问题,海水边界、海洋动力以及时空、噪声的微小变化都会影响信道的稳定,干扰信号的传输;同时,不同平台构型、任务属性、工作环境下异构无人潜水器对水声通信的性能特点、环境适应能力、适装性能提出了更高的要求,对异构无人潜水器平台特性的适配也成为不同无人潜水器平台水声通信系统设计的重要考虑因素。
1.1 移动水声信道
1.1.1 多径
水声信道是一个极其复杂的随机时-空-频变参信道,存在强多径、强衰减、高噪声、严重带限等恶劣影响因素。其中,多径效应是声波在传播过程中受边界(海面、海底)反射或非均匀水体散射影响造成声波在多条路径上传播的现象。
多径效应对通信接收信号造成的码间干扰inter-symbol interference,ISI)、频率选择性衰落是制约水声通信性能的重要因素[17]。除此之外,异构无人潜水器航行过程中随着时间和地点的变化其对应的声传播经历不同的模式、受不同机理、不同时间尺度影响因素的叠加影响,多径时延扩展、稀疏程度、动态特性等特征均会发生明显变化,导致水声通信接收机失配,对保证水声通信性能造成严重困难。
1.1.2 多普勒效应
多普勒效应对通信的影响主要在2个方面:1)引起接收信号的频率偏移;2)引起符号时域的压缩或扩展。无论是对相干解调还是非相干解调,严重的多普勒效应都会导致通信性能的快速下降[17]。
水声信道中多普勒效应的主要产生原因是接收器和发射器之间的相对运动、以及由海面波运动、潮、涌、湍流等海洋环境因素造成的海水介质时变性。
对移动水声通信而言,水下发射器和接收器的相对速度与声速的比率远大于无线电环境中的比率,因此多普勒效应对通信系统的影响要比无线电通信环境严重得多;同时,异构无人潜器中包含了航速较快、航行状态较复杂的潜水器类型,如高机动性AUV航速可达20 kn,导致随机、强烈的多普勒特性[12-13]。
从图1可以看到不同运动状态下会产生复杂的多普勒效应,难以用简单运动模型进行参数描述。而异构无人潜水器由于工作模式、航行特性不同,其运动状态也呈复杂多样特性,因此,如何在这样的情形下有效抑制多普勒效应,是无人潜水器水声通信的关键之一。
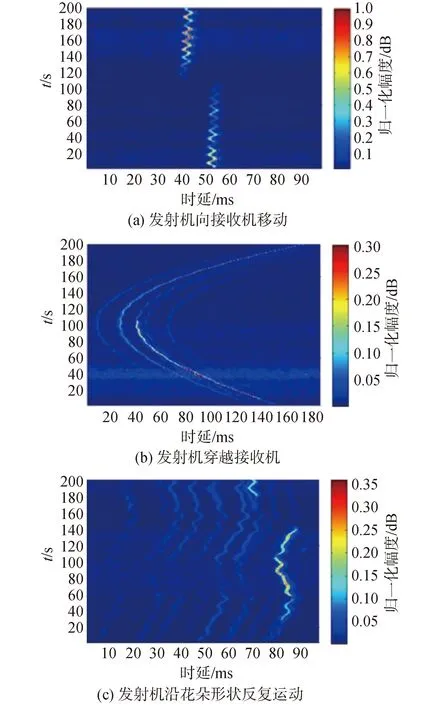
图1 典型运动情况下的多普勒变化[18]Fig.1 Doppler changes under typical motion conditions[18]
1.2 无人潜水器任务约束
对于几类典型的异构无人潜水器而言,大型AUV一般用于深海海域,小型AUV则更为灵活,可应用于多样化的工作水域,包含封闭水域、浅海、深海,近底工作型AUV可贴近海底复杂地形;水下滑翔机呈周期性深度变化,而波浪滑翔机则航行于水气界面。不同工作水域带来的是完全不同的水声信道条件,受不同动态特性、反射特性的界面影响,从而导致完全不同的多径结构。进一步,具备多样化任务能力的混合构型无人潜水器则要求通信系统对工作环境具有更宽泛的适应能力。
在任务属性方面,无人潜水器间通信方式繁多,距离不定,各种通信方式对通信系统技术的要求也不同。如移动平台与母船间互相通信,当传输目标探测信息时,选择上行通信,当传达指挥命令时,选择下行通信。典型地,2种通信方式对数据率的要求有所不同:当传输指令、平台参数信息时,通信数据量小,对数据率要求不高;传输图片、波形等包含大容量数据的信息时,则要求较高的通信速率。
1.3 无人潜水器平台约束
与通用水声通信系统相比,异构无人潜水器水声通信系统搭载于潜水器平台,因此平台自身对水声通信系统也带来不同方面的约束。
首先,在平台适装性方面,小型化无人潜水器虽具有轻便、机动性好的特点,但也面临尺寸、负载、能源等方面的严苛限制,所以其搭载的水声通信系统在架构、算法设计上还需考虑较低的功耗、实现复杂度。
同时,作为移动平台,无人潜水器航行过程中运动、控制及任务载荷工作导致的平台自噪声也对水声通信产生明显的干扰。
荷兰应用科学研究组织S. Giodini[19]、美国罗德岛大学Melodie Ross[20]等对AUV、水下滑翔机自噪声及其对水声通信性能的影响进行了试验评估,结果表明平台自噪声是无人潜水器水声通信系统设计的重要考虑因素。如图2所示为[20]实测UG下潜过程俯仰、泵油、横滚等操作及海鸟电导率/温度传感器(seabird electronics conductivity and temperature,SBECT)对应的噪声谱,由图2可见其自噪声覆盖了常用的水声通信频带。
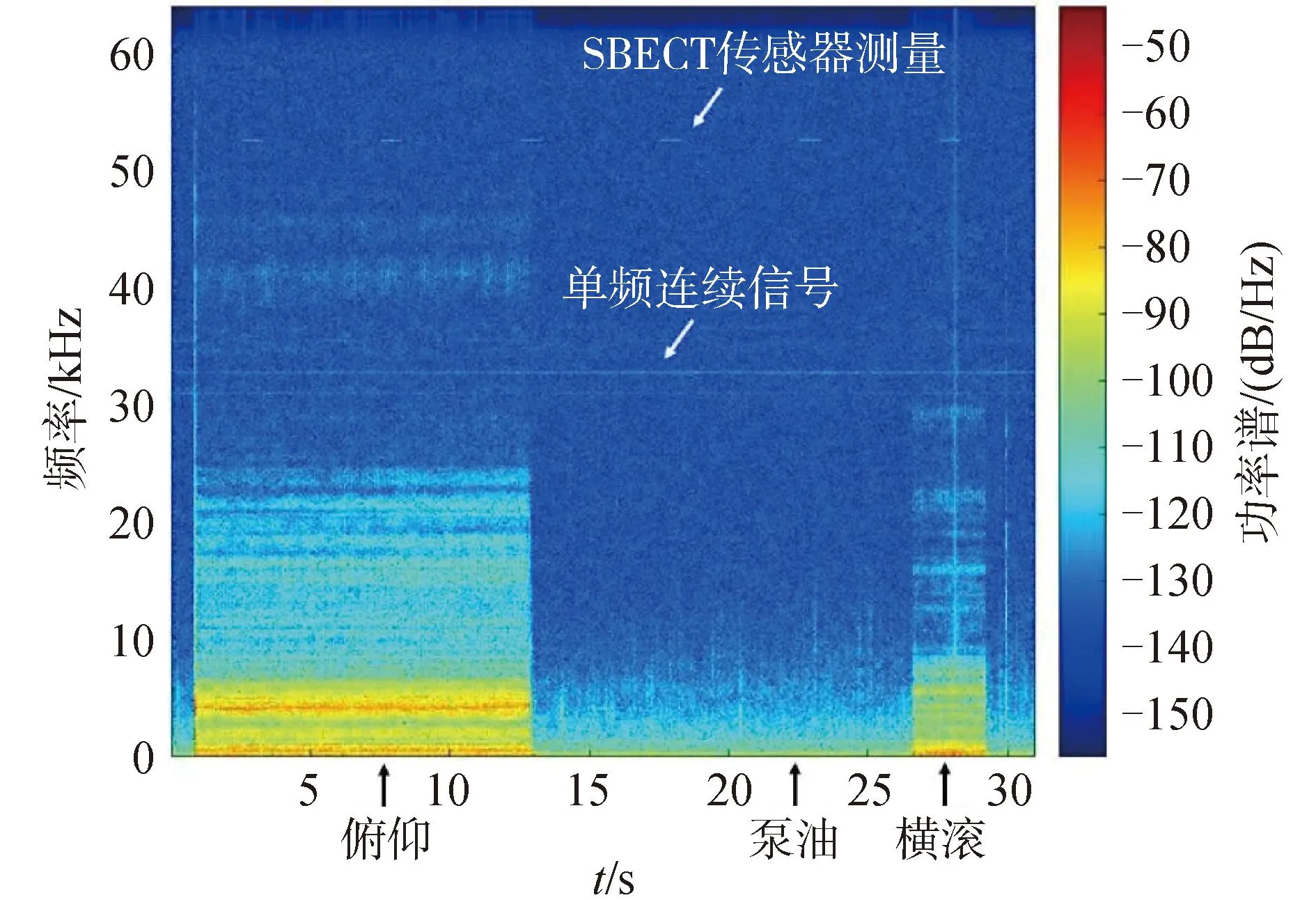
图2 实测UG自噪声特性[20]Fig.2 Measured UG self-noise characteristics[20]
2 无人潜水器水声通信典型制式及其发展
面向异构无人潜水器应用的水声通信技术,与通用意义上的水声通信研究相比,考虑到异构无人潜水器水声通信面临前述信道、平台、任务带来的多方面约束[20-22],因而其采用的典型的水声通信制式也具有针对性;同时,为了适应异构无人潜水器平台的需求也呈现值得关注的发展趋势。
2.1 扩频
扩频通信,是将待传输信息的频谱,用某个特定的扩频序列调制后成为宽频带信号,送入信道中传输;在接收端则采用相同的序列进行解调及相关处理,将信息从收到的宽频带信号中恢复出来。扩频通信,在传输同样信息时所需的带宽远比其他调制方式要求的带宽要宽得多[17]。
扩频通信通过扩展频谱带来的处理增益具有许多窄带通信难以代替的优良性能,如利用伪码或跳频实现了抗截获、测距、码分多址和通信保密等功能。此外,由于其信号带宽远大于信息本身带宽,使其具有优良的抗多径和抗干扰的能力,因而成为近年来水声通信技术研究中的热点,并在不同类型无人潜水器中得到广泛应用。
2016年俄罗斯远东联邦大学等在北冰洋诺维克湾评估了4种不同的AUV水声通信体制,试验结果表明扩频通信具有更好的信道适应性[23]。
哈尔滨工程大学乔钢团队在提升水声扩频通信有效性方面进行了较为深入的研究[24],提出了结合正交M元扩频和循环移位键控的水声扩频技术,实现了10 kbits传输总比特数下1 096.8 bit/s速率的无误码传输。
杭州应用声学研究所吕耀辉等[25]针对M元码分多址水声通信系统中所需扩频序列数量庞大、选码难度高的问题,提出了混沌正交组合序列,通过简单迭代组合产生大量满足要求的扩频序列,而且同族的混沌正交组合序列间满足正交关系[25]。
西北工业大学季赵胜等[26]提出了基于虚拟时间反转-分段式线性调频(VTR-PLFM)扩频调制的移动水声通信方法,该方法首先利用分段式线性调频(PLFM)信号对发送信号进行正交扩频调制以在不进行多普勒频移补偿的条件下抗宽带多普勒频移;并利用虚拟时间反转(VTR)技术聚集多径信号能量,提升系统性能。
考虑到扩频水声通信的性能特点,为了适应在海域监测、特种任务、国防安全等领域有广泛用途的远距离、大深度范围、长时部署无人潜水器的需求,提高通信速率、改善信道适应性、提升低探测概率(low probability of detection, LPD)是无人潜器扩频通信技术研究的关键。
2.2 MFSK
多频移频键控(multiple frequency shift keying, MFSK)通过用多个不同的载波频率代表多种数字信息实现调制,并在接收端通过对频率的检测进行解调,其非相干实现简单、方便、信道容忍性好的特点对异构无人潜水器中的应用带来方便。
面向浅海AUV应用场景,2017年Lars Michael Wolff等[27]设计了一种利用Goertzel算法进行解码的FH-FSK水声通信方法,该系统同时具备测距能力。
2019年Viktor Lidstrom等针对AUV应用,提出一种采用网格编码的置换频移键控技术(permutated frequency shift keying,PFSK)并在斯德哥尔摩群岛海域进行了海试试验,获得优于传统二元频移键控(2FSK)的通信性能[28]。
马璐等[29]设计了一种采用非相干多载波频移键控(MFSK)的无人潜水器水声通信系统。为了保证遥控指令、状态信息等的可靠传输,采用停止等待自动要求重发(ARQ)协议对通信过程进行差错控制。所有控制算法均在低功耗数字信号处理器(DSP)硬件平台下实时实现。通过南海试验测试,验证了该系统的实用性和稳定性。
长期以来MFSK作为非相干通信体制的典型代表,因具有实现复杂度低、信道宽容性好的特点而在商用水声通信产品中得到广泛应用。特别地,考虑到小型化无人潜水器平台在尺寸、功耗、成本方面的严苛约束,以综合各方面因素折中下适用的水声通信性能为设计目标,MFSK为此类无人潜水器平台微小型、低成本水声通信载荷的研制提供了现实的发展方向。
2.3 OFDM
正交频分复用(orthogonal frequency division multiplexing, OFDM)具有较高的数据传输效率、频谱利用率以及较强的抗多径能力,能够有效抵抗码间干扰,近些年成为AUV水声通信的研究热点。
然而,与传统的单载波通信系统相比,OFDM通信系统对多普勒频偏和相位噪声更加敏感,且不同类型无人潜水器在水下的姿态倾角实时变化,航速受流的影响起伏不定,产生的多普勒偏移和相位噪声会严重破坏OFDM子载波的正交性,使其在水声通信中的应用受到信道时变性和多普勒频偏的限制。因此,想要到达稳定的通信性能,必须要对水声信道中广泛存在的多径和多普勒进行实时跟踪和补偿[17]。同时,OFDM发射信号峰均比(peak to average power ratio,PAPR)高的问题直接影响发射效率,特别在无人潜水器平台发射功率受限、远距离通信等场景下对其应用造成严重限制。
Nicolas Grollier等[31]采用一种单元平均恒虚警检测检测器(CA-CFAR, cell averaging constant false alarm rate)提高多径、多普勒及噪声条件下OFDM通信的同步检测性能。
Yusuke Onna等[31]设计了一种在32 kHz带宽上采用8通道接收分集的水声通信系统用于AUV与母船间水声通信,在伊豆内浦湾海域试验中达到150 kbit/s的无误码通信速率。
中科院声学所赵世锋等[32]基于一致OFDM水声通信多普勒信道模型提出一种扩展路径识别(GPI)算法。该方法首先使用信道多普勒扩展矩阵构造等效发射序列,将多普勒信道转化为等效线性时不变信道。然后使用GPI算法估计信道多普勒及各路径的时延及幅度参数,实现低复杂度稀疏信道估计。
冯成旭等[33]提出一种基于OFDM的频域决策反馈均衡算法,该算法可以补偿频率选择性衰落,在减少冗余循环前缀的前提下主动克服符号间干扰和载波间干扰的不利影响。
李斌等[34]提出了一种基于误比特信息区间斜率的多普勒估计算法,采用计算误比特信息区间斜率取代逐网格搜索最优误比特信息寻优过程,在进一步提升寻优速率的同时有效减小陷入局部最优解的可能性,并有效降低算法的计算复杂度。
普湛青等[35]提出了一种基于时频联合搜索的多普勒跟踪和快速补偿算法,该算法利用先导子载波结合频域重采样,搜索不同多普勒因子下每个OFDM符号的信道响应。利用压缩传感技术,该算法根据水声信道的稀疏特性,选择与最稀疏的信道响应相对应的多普勒因子,并使用更多基于频率的计算方法对该多普勒效应进行补偿。实现了对AUV时变多普勒的实时跟踪和快速补偿。
在OFDM水声通信机设计与硬件实现架构方面,周跃海等设计的可配置OFDM水声通信机基于高性能数字信号处理器实现了OFDM调制解调、信道估计均衡参数的高度灵活配置[36]。面向多样化异构无人潜水器应用场景,增加OFDM通信参数配置灵活性,为改善环境适应性能提供了可能。
需要指出,作为典型的高速率水声通信制式,随着各类水下信息获取任务中大数据量、高通信效率的需求日益增多,在无人潜水器应用中如何进一步提高通信速率、频谱利用率是OFDM水声通信技术的一个研究热点。
结合多输入多输出(multiple-input-multiple-output, MIMO)与OFDM可在传统单发模式基础上成倍提升OFDM通信速率及频谱利用率,文献[37-38]开展了MIMO-OFDM相关理论及实现技术研究;2022年文献[39]在日本骏河湾(Suruga Bay)海域开展MIMO-OFDM海试试验,采用并行发射信道估计与多通道接收机解码结合Polar码实现10 km距离的MIMO-OFDM通信。上述研究表明,MIMO-OFDM有望为中远距离高速高谱效无人潜水器水声通信提供可行的解决方案。
2.4 单载波相干水声通信
单载波相干水声通信具有较高的频谱效率,但因其通常需采用信道均衡器并结合信道编码对信道多径、噪声等严重影响因素造成的码间干扰、突发错误进行抑制,大量研究集中在均衡、编码算法上。
Roee Diamant等[40]针对多水下平台点对点通信应用中对减小训练序列长度提高通信效率的需求,提出一种半盲联合信道估计-解码算法(S-JCED),海试结果表明在小训练序列长度下所提算法可获得满意的通信性能。
为了实现低复杂度下的单载波水声通信的最优均衡,陶俊等[41]提出一种Hadamard-Haar随机预编码(Hadamard-Haar random precoding,HHRP)方案,通过在接收端通过向量近似消息传递(vector approximate message passing,VAMP)算法使均衡性能接近理论最优值。
殷敬伟等[42]提出一种单载波频域均衡(single carrier frequency domain equalization,SC-FED)解调方法,该方法采用基于干扰抑制合并(interference rejection combining, IRC)的部分FFT解调克服MIMO-SC-FDE中的同道干扰和多普勒。
相对而言,深海潜水器与母船间垂直水声信道具有较好的稳定性,有利于利用相位相干水声通信获得高通信容量,是比较典型的单载波水声通信应用场景。
徐立军等[43]设计了一种全海深的单载波相干水声通信系统,该系统利用三基元接收通道进行空间分集接收,相干解调算法采用了时频域双向turbo均衡器结构,均衡器系数调整采用了改进比例归一化最小误符号率准则算法。该通信机于2018年12月12日在马里亚纳海沟挑战者深渊进行了实时水声通信试验,实现了水下10 500 m到水面的高速水声通信,通信速率6 000 bit/s,通信误比特率为10-5量级。
普遍认为,在强烈时变多径、长多径时延、强噪声等复杂信道条件下单载波相干水声通信系统性能易受均衡算法类型、参数影响,工作稳定性往往难以保证[11-13]。因此,工作环境较为复杂的无人潜水器较少采用此类通信体制的报道,更多情况下作为信道较为理想时的可选通信体制。为了适应快速发展的异构无人潜水器通信需求,研究稳健、高效、低系统开销的信道均衡、编码方法、接收机结构是单载波相干水声通信的一个重要研究方向。
3 典型异构无人潜水器水声通信系统
3.1 AUV水声通信系统
3.1.1 商用AUV水声通信系统
水声通信是AUV信息传输的重要手段,针对AUV的水声通信调制解调机目前主要有商用类和专用研发类[44]。
美国LinkQuest公司的UWM系列水声通信机(如图3所示),如WM4010被用于深水AUV Kongsberg Hugin 3000[45]上传传感器采集信息及AUV状态等各类数据。

图3 LinkQuest水声modem[45]Fig.3 LinkQuest underwater acoustic modem[45]
美国Woods Hole海洋研究所研发的WHOI Mircomodem系列通信机具有FH-MFSK及PSK 2种不同的通信体制,通信速率为80~5 400 bit/s,该系列水声通信机被包括Bluefine、 Remus等多种AUV、Glider等无人潜水器采用[45-46]。
美国AquaSeNT公司研制的AM-AUV水声通信调制解调机[47]是专门为自主水下航行器(AUV)设计的。其工作频率范围为21~27 kHz,采用OFDM通信制式,通信距离5 km,通信速率375~1 500 bit/s不等。
英国Blueprint Subsea公司推出的SeaTrac系列水声调制解调器(如图4所示)质量轻,可用于中小型遥控水下航行器(remote operated vehicle, ROV)或AUV等[48]。SeaTrac的3种型号(X150、X110和X010)基于扩频调制方案,工作频率范围为24~32 kHz,通信距离达1 000 m,数据速率为100 bit/s。由9~28 V电源供电,在传输过程中功率消耗为6 W。

图4 SeaTrac系列水声modem[48]Fig.4 SeaTrac series underwater acoustic modem[48]
法国公司Sercel推出的多调制声学遥测系统(MATS3G)调制解调器[49]可用于各种水下应用(如图5所示),如AUV命令和控制以及使用FSK、PSK调制方案的水下监视系统。在低噪声环境中,调制解调器的最大通信范围为5 000~15 000 m,数据速率为850~24 600 bit/s。调制解调器在传输过程中消耗高达75 W的功率,并且可以部署在6 000 m的深度。

图5 MATS3G水声modem[49]Fig.5 MATS3G underwater acoustic modem[49]
德国EvoLogics公司S2C 系列水声通信机采用扫频-扩频载波(sweep-spread carrier, S2C)调制技术[50],该系列通信机典型型号R18/34的性能参数为工作频带18~34 kHz,通信速率最高13.9 kbit/s,通信距离3 500 m。同时EvoLogicsc产品可提供定位-通信组合功能,在多种型号AUV、Glider、波浪滑翔器中作为水声通信载荷得到应用。
Tritech公司设计的Micron低功率声学调制解调器[51]使用扩频调制方案在20~28 kHz的频率范围内工作(如图6所示),因具有小尺寸及抗多径能力强的特点而适用于无人潜水器。其通信范围(水平)可达500 m,数据速率为40 bit/s。它在传输过程中消耗约8 W,可以部署在750 m的深度。

图6 Tritch Micron水声modem[51]Fig.6 Tritch Micron underwater acoustic modem[51]
3.1.2 小型AUV水声通信系统
伴随着不同应用场景和功能需求的AUV产品谱系不断扩展,按照2016年美国海军公布的AUV口径分类[52],将口径为76~254 mm定义为小尺寸AUV。随着AUV面向不同应用场景和功能需求的发展,小尺寸AUV平台逐渐成为AUV发展的一个重要分支。
如2017年美国蓝鳍金枪鱼公司研制的Bluefin SandShark型小尺寸AUV,长度为0.51 m,质量为6.8 kg[53-54];2015年Riptide公司推出的微型AUV,其基座直径约为0.12 m,长度约为1 m,质量约为9.98 kg[55-56],如图7。

图7 Bluefin SandShark型小尺寸AUV[53]及Riptide公司微型AUV[55]Fig.7 Bluefin SandShark Small size AUV[53] and Riptide Micro AUV[55]
与大、中型尺寸AUV相比,由于小型AUV在空间尺寸、功耗、成本等方面对搭载的水声通信系统有更严苛的约束,小型AUV水声通信系统往往采用实现低复杂度低、解调算法实时算力要求低、发射功耗低的通信制式,因此在通信距离、数据率等指标方面也相应折中。
图8为德国汉堡科技大学于2015年研制的HippoCampus微型AUV长度仅为0.3 m,质量仅为0.7 kg,并专门研发了其搭载的低成本、小尺寸水声modem[57-59],其尺寸50 mm × 50 mm × 25 mm,通信距离150 m,采用OFDM/FSK调制。

图8 HippoCampus微型AUV及其modem[57]Fig.8 HippoCampus micro AUV and its modem[57]
国内方面,西安天和海防智能科技有限公司研制的TH-050B型小尺寸AUV长为1.5 m,直径为18 cm,如图9所示,其配备的AMLink水声modem具备50~2 000 bit/s通信速率[60]。
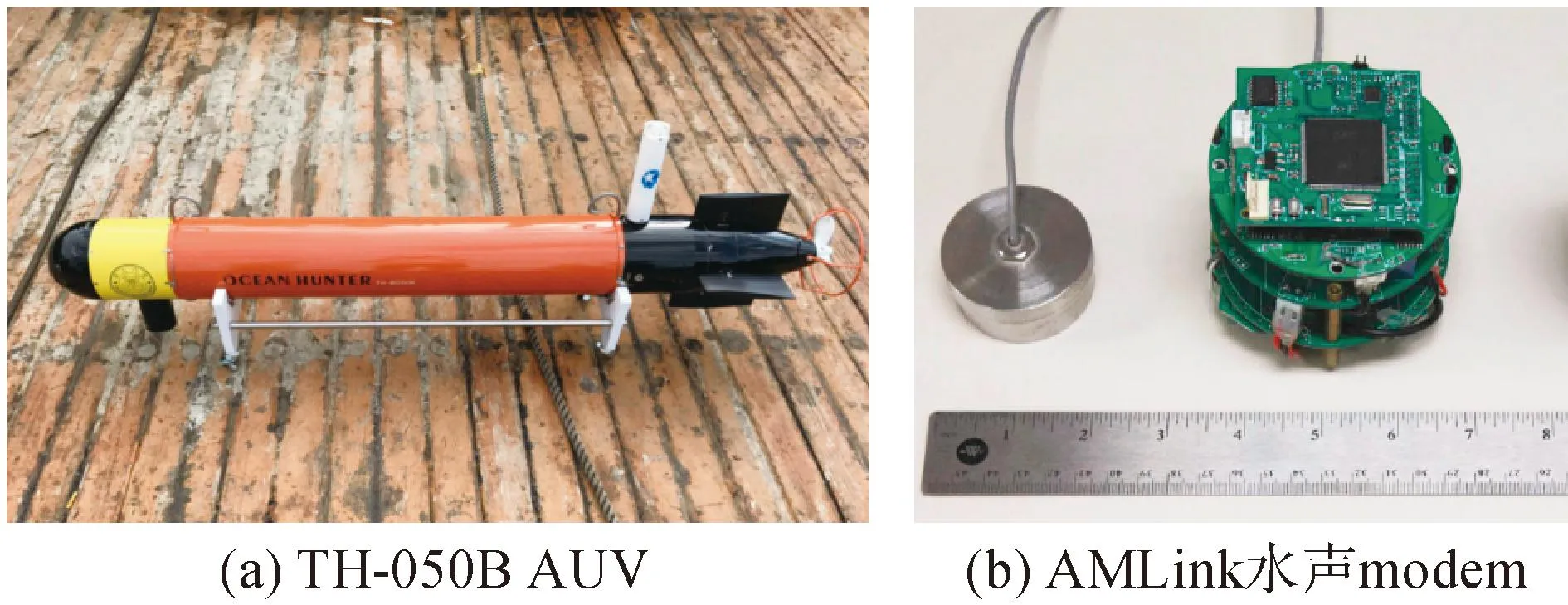
图9 TH-050B AUV及AMLink水声modem[60]Fig.9 TH-050B AUV and AMLink underwater acoustic modem[60]
3.1.3 深海AUV水声通信系统
除了尺寸上的分类,面向深海研究开发的全海深AUV由于具备大深度作业能力,近年来得到了快速发展。
考虑到全海深AUV的航行模式以垂直方向上浮、下潜为主,其外形设计不同于通用AUV采用的流线型、水滴型等适合水平航行的线型,往往采用类似刀片的水平尺寸小、垂直尺寸大的构型。由于商用通信机中可供选择的全海深型号较少,全海深AUV往往采用考虑深海信道传播特性而研发的专用水声通信机。
2021年11月6日,哈尔滨工程大学牵头研发的“悟空号”全海深无人潜水器(AUV)在马里亚纳海沟“挑战者”深渊海试中下潜至10 896 m(如图10所示),“悟空号”AUV高速水声通信系统采用OFDM通信体制,在万米海底与母船直线距离超过15 km深海中,可准确传输状态信息,实测上行峰值通信速率2 003 bit/s,数据接收正确率超过93%[61]。
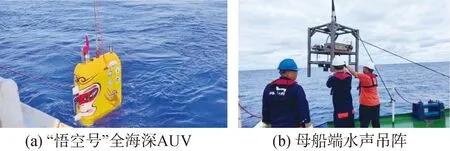
图10 “悟空号”全海深AUV及其母船端水声吊阵[61]Fig.10 “Wukong” total sea depth AUV and its mother vessel side underwater acoustic array[61]
3.2 水下滑翔机水声通信系统
水下滑翔机(underwater glider, UG)是一种典型的自主式水下航行器,主要采用浮力驱动实现其在海洋中的上升或下潜。在下潜起始阶段,通过浮力驱动单元减小自身排水体积,使重力大于浮力,开始下潜;到达设定深度后,在浮力驱动单元作用下,改变自身排水体积,使其所受浮力大于重力,从而实现下潜到上浮的转变。在下潜和上浮过程中,借助固定水平翼上的水动力产生水平运动,从而实现在纵平面内锯齿形滑翔运动。
水下滑翔机作为小型的移动观测平台,具有低能耗、运行成本低等特点,能够满足长时序、大范围的海洋三维观探测需求,已广泛应用于海洋现场观测、科学研究、环境保护、国防安全等领域。
水下滑翔机在执行探测任务期间,因作业时间长,收集信息数量大,传送数据与接收决策指令的需求显著增加,对通信手段及性能提出了更高要求。由于水下滑翔机上浮-下潜的固有锯齿形航行特性,在其露出海面时刻具备无线通信能力,目前,水下滑翔机主要采取滑翔上浮至水面,经卫星通信与岸站建立数据交互通道[9]的通信方式。因而与AUV这类全时工作于水下的无人潜水器相比,水声通信系统属于水下滑翔机的任务性载荷,主要应用于水下节点数据接驳或时效性通信应用。
另一方面,水下滑翔机航行特性意味着其水声通信信道体现出浅海、深海周期性变化的规律,对水声通信性能造成明显的影响。徐文等[2]进行水下滑翔机深海信道连通性评估海试试验,如图11(a)及声源距离水下滑翔机 40 km 时的信噪比(signal noise ratio, SNR)和对应的扩频二进制调制通信误比特率(bit error ratio, BER),可知在水深200~600 m范围内,具有较高的接收信噪比及较低的通信误比特率,验证了深海情况下,深度对通信接收性能具有显著影响[2]。
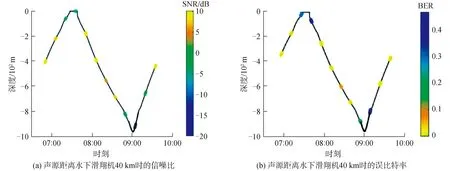
图11 水下滑翔机深海信道连通性评估[2]Fig.11 Evaluation of deep sea channel connectivity for underwater gliders[2]
目前的研究与试验中,水下滑翔机大多搭载商用水声通信机[2,9,46,49,52],从水下多平台立体化信息支撑的角度,研制可适配水下滑翔机航行特性,同时可满足其功耗、负载约束的水声通信机具有现实必要性。
3.3 波浪滑翔器水声通信系统
波浪滑翔器(wave glider, WG)是一种利用波浪动力来进行驱动的无人自主航行器,它能够充分吸收海洋中长期存在的波浪能源将其转换为前进动力,这种利用波浪能源产生动力的技术使波浪滑翔器具备长时工作的特点。
波浪滑翔器由水面浮体平台、水下的“滑翔”推进器结构和连接这两部分的脐带缆组成,因而具备水下-无线跨介质传输的独特优势。国内外多家研究机构开展了利用波浪滑翔器提供AUV、水下滑翔器信息中继的研究及试验。
北约海事研究与试验中心(NATO Centre for Maritime Research and Experimentation, CMRE) 在2012年测试了使用搭载Evologics S2C水声通信机的e Liquid Robotics波浪滑翔器作为OEX-C AUV及SLOCUM水下滑翔机等异构无人潜水器集群的信息中继节点[62-63],如图12、13。
2018年美国Woods Hole海洋研究所在大西洋洋中脊海域进行了Sentry AUV与波浪滑翔器协同试验(如图13所示),期间波浪滑翔器利用搭载的WHOI Micro modem-2水声通信机发挥了AUV通信中继作用[64],该水声通信机采用PSK/FH-MFSK通信制式支持80~5 000 bit/s通信速率。
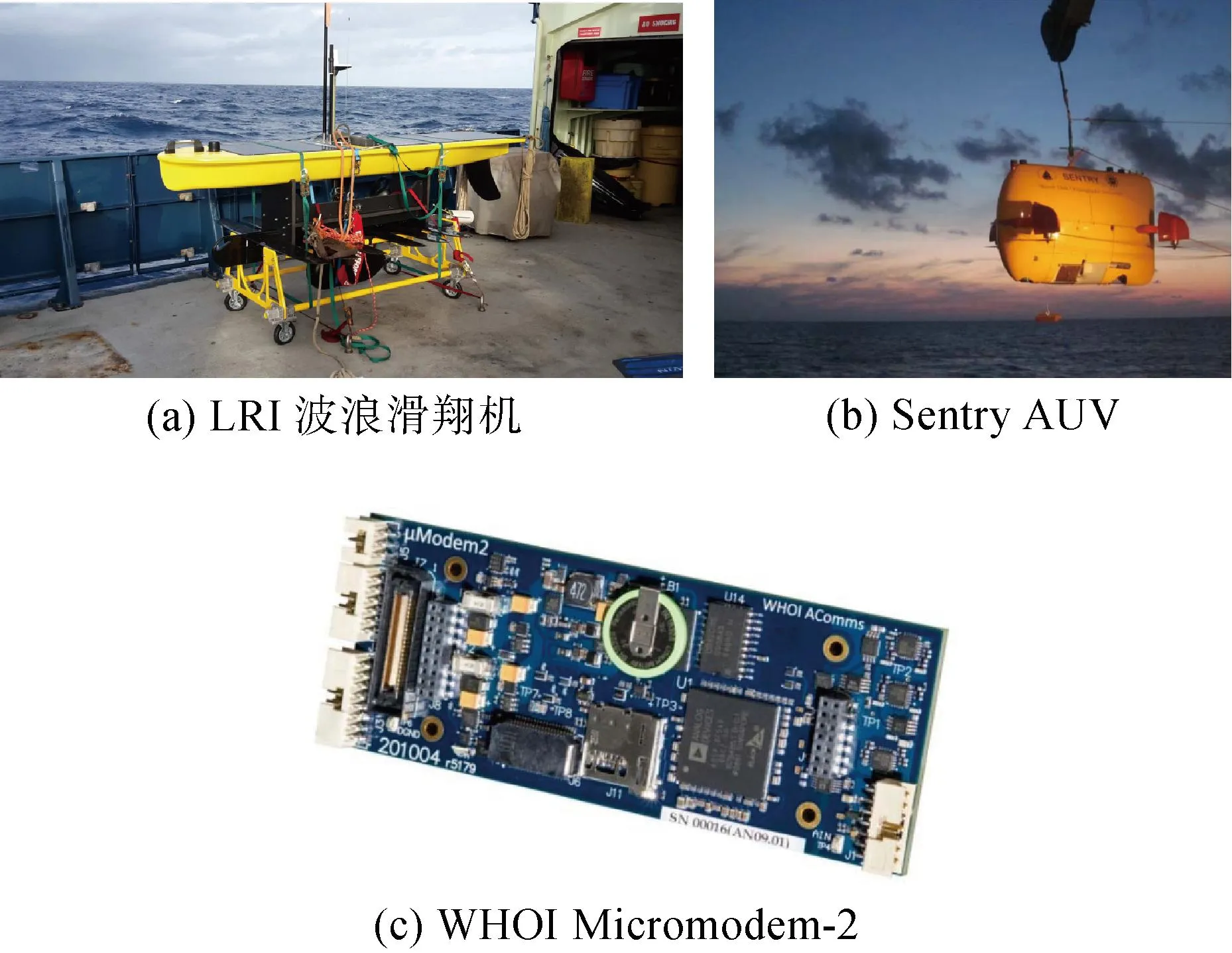
图13 波浪滑翔器与Sentry AUV通过WHOI Micromodem-2协同[63]Fig.13 Wave glider works with the Sentry AUV via WHOI Micromodem-2[63]
杨义军等[65]在厦门海域开展了由波浪滑翔器、AUV、浮标节点组成的多平台水声通信组网试验(如图14所示),验证了波浪滑翔器作为浅海域/极浅海域跨介质信息中继节点的有效性。

图14 波浪滑翔器及其配备的水声通信机[65]Fig.14 Wave glider and its underwater acoustic modem[65]
由于波浪滑翔器作为海气界面无人平台其搭载的水声通信系统工作于海洋浅表层,声传播受风浪、浅表层声速剖面影响大,要求波浪滑翔器水声通信系统对时变信道具有较好的适应能力,或具备通过切换不同通信制式适应不同信道质量的功能;同时,波浪滑翔器具有作为跨介质中继平台的天然优势,这一特点也要求其水声通信系统往往需考虑与无线终端的跨介质交互设计。
3.4 双功能/多功能无人潜器水声通信系统
针对UG运动速度慢、抗流能力相对较弱的问题,Bachmayer等[66]首次提出了“Hybrid Glider”的概念。经过近20年发展,混合推进水下滑翔机(hybrid-driven underwater gliders, HUG)平台技术逐渐成熟。国外已达到实用水平和商品化的HUG,包括法国ACSA公司研发的Sea Explorer[8]、巴黎高科海洋工程与海洋技术学院(ENSIETA)研发的Sterne[8]和意大利Graal Tech公司研制的Folaga[67]。它们均在UG的尾部加装螺旋桨推进器,实现多模式混合推进。
北约水下研究中心[64,66-68]在多次海试中采用Folaga混合AUV搭载Kongsberg Maritime水声通信机进行移动水声组网(如图15所示),该水声通信机可提供500 bit/s通信速率,试验中评估了不同协同模式下的组网通信性能[64]。
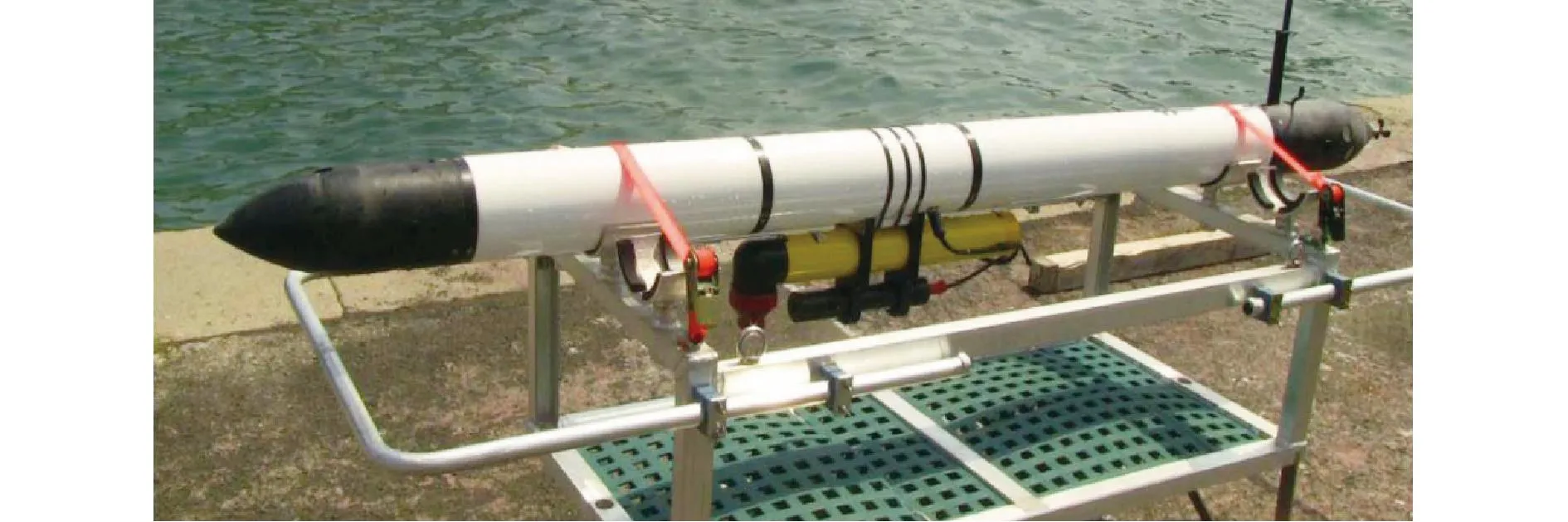
图15 Fologa混合AUV/Glider集成Kongsberg Maritime水声通信机[64]Fig.15 Fologa Hybrid AUV/Glider integrated Kongsberg Maritime underwater acoustic modem[64]
中国船舶科学研究中心所牵头研制的双功能深海无人潜航器基于可变翼形/可开合式推进技术(如图16所示),以剩余浮力/推进器双模驱动,融合大范围滑翔探测和区域性高机动搜索2种航行与作业功能[69]。其配备的水声通信机提供了可适应不同作业模式的指令、状态信息传输链路,采用直接序列扩频和BPSK通信制式可分别工作于55 bit/s、1 172 bit/s 2种传输速率[70]。
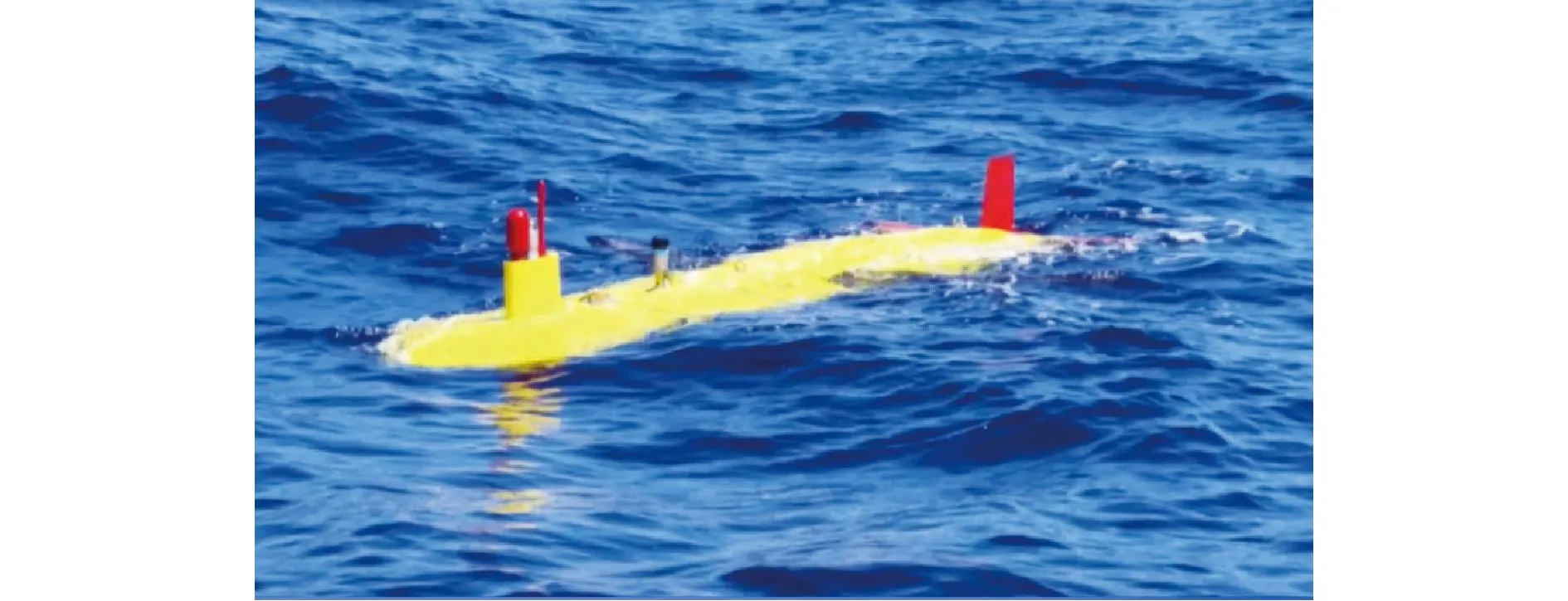
图16 双功能深海无人潜航器[69]Fig.16 Dual-function deep-sea unmanned underwater vehicle[69]
双功能/多功能无人潜器通过平台功能扩展显著提升了多样化任务执行能力,同时具备高机动性、长时工作、大工作深度等特点,因此其水声通信系统应具有更强的信道适应性,对抗多径、抗多普勒性能及也提出了更高的要求。
3.5 异构无人潜器协同组网通信
2017年,COSTANZI等在意大利La Spezia省Cinque Terre海域开展了ASW-ODC17多节点协同网络试验(如图17所示),由包括各类潜器、船舶、浮标在内的20个固定、移动节点组成,试验中测试了OEX AUV、Folaga glider及波浪滑翔器等异构无人潜水器间水声通信链路[3]。
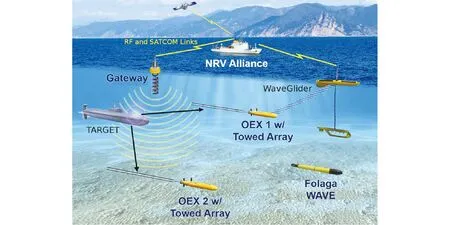
图17 ASW-ODC17多节点协同网络示意图[3]Fig.17 ASW-ODC17 multi-node collaborative network diagram[3]
2020年,NATO设立由北约海上司令部(maritime command,MARCOM)指挥的、专用于MUS作战实验的“Dynamic Messenger”演习,首次演习于2022年9月举行,该演习与葡萄牙南部特罗亚(Troia)附近举行的“海上无人系统机器人实验和原型构建”(robotic experimentation and prototyping with maritime unmanned systems,REPMUS)演习串联进行。“REPMUS”演习使用了约45架UAV、18艘USV和40艘UUV;“Dynamic Messenger”演习中使用了11架UAV、8艘USV和30艘UUV,各类水下平台间信息交互、共享是演习的重要内容[71]。
浙江大学联合多家单位构建了包括3类无人潜水器,共计54台套异构潜水器组成的网络系统,围绕中尺度涡动力现象观测、水下声学环境测量与目标探测、海洋油气工程环境保障、海域环境特征研究等科学和应用目标,于2019-2021 年开展了累计6个多月的海上试验与示范。采用的水声通信机为SmartOcean Angelfish(如图18所示),其调制方式可以根据通信性能动态调整,试验过程中节点间通信距离约为3 km[2]。

图18 异构无人潜水器通信辅助网络海上试验设置[2]Fig.18 Heterogeneous unmanned submersible communication auxiliary network sea test setting[2]
乔钢等[72]在多无人潜水器体系结构、任务分解与分配、弱通信条件下的协调控制等方面开展了研究,并于2014年8月在山东威海附近海域进行了潜器协同编队海上试验。
中国科学院沈阳自动化研究所在多无人潜水器仿真系统设计、协同导航以及协同编队控制方面开展了研究,2014年起相继进行了基于水声通信的多AUV协同编队试验、异构无人潜水器编队试验[72]。
4 总结与展望
随着我国海洋探索开发、权益与发展利益维护逐步从近海向远海,从平面向立体,从分立向全方位综合感知的海洋信息网络是国家海洋需求中的关键技术之一,是海洋国家安全、海洋权益维护、应急体系、海洋资源开发、生态环境保护的关键基础和重要支撑。
AUV、水下滑翔机、波浪滑翔器等各类异构无人潜水器平台跨域互联互通为分布式、异构、动态的信息融合、协同提高信息感知获取性能提供了现实可能性,成为了当前海洋立体信息网络建设的发展热点和研究前沿。
由于声学信息载体特殊性、水声信道随机复杂性及平台自身带来的严苛约束,各类水下无人平台的信息化步伐严重滞后于空间和水面。目前各类无人潜水器大多将通用水声通信设备或研发适合自身平台、任务特性的专用水声通信系统作为通信载荷,并已在多异构无人潜水器水声通信、组网领域取得显著进展,为多类应用场景提供无人化、立体化、分布式的水下信息支撑,但是,仍无法满足快速发展的多平台多域海洋信息获取、传输、感知需求,尚有诸多问题亟待解决。
面向高性能海洋立体信息体系建设的需求,异构无人潜水器水声通信技术的发展呈以下几个趋势:
1)在异构无人潜水器多样化任务模式下,单一通信制式难以满足要求,通过实时获取或学习信道状态信息实现通信制式/参数优化,设计低延迟、少反馈或无反馈的调整策略,从而充分利用信道容量,提高水声传输效率和环境、任务的适应性。
2)结合异构无人潜水器不同工作特性对海洋深度、广度的充分覆盖,利用水下多移动平台在空间、时间、运动状态上的互补性,研究异构无人潜水器信道资源机动优化调配,构建体系化、可重构、适度耦合的异构无人潜水器信息网络。
3)考虑异构无人潜水器平台自身资源约束,搭载多种任务载荷导致系统开销增大、适装性差,采用通信、导航、定位、探测一体化设计,如通信波形设计兼顾导航、定位、探测,从而以最小的软硬件开销实现系统最优下的一体化多任务功能;
4)充分结合声、光不同信息载体具有的互补特性,研发具备高容量、远距离、环境适应性好的异构无人潜水器声、光融合水下通信技术。
猜你喜欢
作文周刊·小学六年级版(2023年32期)2023-08-17
小学教学研究(2022年5期)2022-04-28
中国船检(2019年6期)2019-11-29
中国军转民(2017年9期)2017-12-19
中国洗涤用品工业(2017年2期)2017-04-16
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
电信科学(2016年11期)2016-11-23
系统工程与电子技术(2016年7期)2016-08-21
通信电源技术(2016年6期)2016-04-20
