
基于相机组网测量的大型结构变形监测技术与应用
2024-01-07 13:24:22于起峰关棒磊胡彪孙鹏举张跃强尹义贺尚洋
强度与环境 2023年6期
于起峰 关棒磊 胡彪 孙鹏举 张跃强 尹义贺 尚洋
(1 国防科技大学空天科学学院,长沙 410073;2 图像测量与视觉导航湖南省重点实验室,长沙 410073;3 深圳大学 物理与光电工程学院,深圳 518060)
0 引言
摄像测量是形貌变形与运动测量的有效手段,是科学实验、工程监测、自动化、导航制导等的重要方式与内容,具有高精度、非接触、自动智能等优势[1]。然而,与许多其他观测手段一样,摄像测量也存在观测范围或观测物距与观测分辨率及精度之间的固有矛盾,这在很大程度上限制了摄像测量的应用[2]。许多大型基础设施,如桥梁、隧道、公路、铁路等工程设施的高精度变形监测,通常采用应变片、全站仪等技术手段,时间和经济成本较高,并且需要中断这些设施的运营[1,3-7]。传统的摄像测量系统构造方式无法解决上述观测范围与观测精度之间的矛盾,测量范围与测量精度之间的尺度跨度很难突破5 个数量级。
本文提出了相机组网这一类新的摄影测量构型方式,包括并联相机网络、位移传递串联相机网络、位姿传递串联相机网络、串并联相机混合网络、动联相机网络等摄像测量等新方法[8-11]。根据测量需求对相机进行组网观测,能够实现基于不稳定观测平台,对不通视观测点、大范围大量散布测点等运动变形的精密动态观测,并突破了观测范围与测量精度之间的固有矛盾,测量范围与测量精度间的尺度跨度达到了6 到7 个数量级。这相对于传统的摄像测量做法是惊人的性能提升,大大拓展了摄像测量的能力和应用前景[8-9]。
1)桥梁大型结构变形监测需求与现状
随着越来越多的广域基础设施(桥梁、隧道、公路、铁路等)的建设、运营以及接近预期寿命,其结构损伤、破坏甚至坍塌正变得日益频繁[12]。这使得全面、及时、精确的监测位移和变形参数的需求尤为重要,不仅能在建设过程中确保质量和效率,还能通过结构力学分析和健康监测进行损伤和破坏预警,以防止灾难性事故。然而,目前因为监测手段的限制,大范围高精度的变形观测常常在周期长、效率低、工作量大和测量成本高等问题中举步维艰,这使得广域基础设施的全面及时的健康监测成为一个挑战[13-15]。在结构位移的测量方法中,我们通常分为接触式和非接触式两类,但由于技术原理、经济性等因素,现有方法均难以满足位移的多点同步、实时动态、精密测量的需求[16]。因此,现阶段迫切需要发展实时精密的基础设施结构位移监测新方法。基于计算机视觉的基础设施结构位移监测方法因其众多优点,如远距离、非接触、高精度等,越来越受到科研和工程人员的注重[17]。然而,它也存在着一些问题,例如像素分辨率不足、相机位置选择等问题,这些都极大地限制了其在实际工程中的准确性、实时性、动态性与可行性[18]。因此,本文旨在解决上述问题,以推动基础设施结构位移的实时精密监测技术发展。
2)风电叶片变形监测需求与现状
风力发电作为一种清洁能源,其商业化应用已受到广泛关注。其中,风电叶片是影响风力发电系统整体运行及能效的核心部件,其变形特性和稳定性对系统的运行有直接影响[19]。因此,对风电叶片的检测与维护需求迫切,实现其安全健康监测对保障系统稳定运行,降低系统成本极为重要。目前,已有许多研究关注风电叶片的检测技术,涌现出一些新的检测方法。例如,通过数值模拟法研究风场脉动对风电设备的影响[20];利用声发射技术对叶片旋转轴和齿轮箱进行状态检测,提前发现和分离故障信号,结合振动测试和频域分析,诊断传动轴和齿轮箱故障[20]]。然而,大型风力发电叶片的在线测量技术仍面临挑战[21-22]。例如,声发射方法局限性大,只适用于生产环境下的检测[23];光纤光栅传感器虽能进行在线检测,但需预埋于生产过程中,不适用于已投入使用的叶片,且可能存在自身老化或损坏问题[24-25]。近年来,光学视频测量技术发展迅速,通过高速相机和图像相关算法,成功应用于获取飞行器结构件表面应变片的空间坐标[26],风电叶片的在线检测设定了基础[27]。
面对桥梁变形监测需求及存在的挑战,相机网络具有极大的优势[28-30]。这种非接触、无损的测量方式可实现大范围、高精度的变形测量,长时间动态监测,且不要求基础设施中断运营[31]。本文将成功将其应用于大型桥梁的多测点变形和动态挠度测量,有效解决了相关国民经济和国防建设中的困难问题[32],针对风电叶片的观测难题,本文提出的全局测量站和局部测量站组网观测,能够同时获取风电叶片的全局运动和局部变形。
1 桥梁沉降变形监测
传统路基沉降测量要求测量仪器安装在稳定平台的限制,本文提出了位移传递像机网络摄像测量方法。该方法可同时测量得到路基沉降变化、俯仰变化以及旋转变化,并可通过设计不同形式的位移传递链路和测量单元将该方法用于测量不同结构类型的桥梁变形,适用范围广[1,10]。
1.1 基本原理
针对大型桥梁等线状结构特征以及存在的大尺度测量范围和高精度测量要求,本研究提出了广域基础设施结构静动态变形的相机组网测量方法。主要包括位移传递串联相机网络、并联相机网络、位姿传递串联相机网络、串并联相机网络和车载动联相机网络五类方法,可满足桥梁等广域基础设施结构变形多点同步、实时动态、精密测量需求。
位移传递串联相机网络是将两个相机尾对尾固定成双头相机测站,此时双头相机的位移和转角具有一致性,形成固连约束;相邻双头相机测站间放置多个测量点,成像于不同相机的同一测量点真实位移变化,形成同名标志约束。沿待测线状结构长度方向布设多个双头相机测站,测站间由合作标志点连接,当存在两个或两个以上控制点或已知点时,基于上述约束在测量基站不稳定条件下实现结构大范围时空多点高精度静动态测量与监测。
并联相机网络针对桥面、边坡等面状结构特征,根据监测范围在测量平台上布置一个或多个测量相机看向待测结构,同时在平台上布置两个或多个校准相机看向基准控制点,基于首创的不稳定平台的静态基准转换方法,确定相机坐标系Ci与平台坐标系B的转换关系,从而将Ci中的测量点位移变化转换至基准控制点坐标系W下,实现不稳定平台亚毫米级静动态变形自校准测量,有效解决单一相机测量尺度与精度之间的固有矛盾。位姿传递串联相机网络针对高架桥转弯段等不通视结构特征,用相机和标志物组合成传递站构造折线光路,通过静态基准转换方法,将传递站平台坐标系B转换至前一站相机坐标系C1下,传递站中的相机坐标系C2与B的位姿参数可预先标定得到,而实现C1与C2的坐标系统一,将空间任意区域柔性地联系起来,测量不通视空间任意区域目标间相对位置、姿态及其变化等,有效解决不可通视点的变形测量问题。
串并联相机网络针对长大结构特征,实际工程中除了关注桥梁整体沉降或偏移外,桥梁断面的收敛变形也是其结构状态的重要指标。多个测站串联传递位移、姿态,单个测站中相机并联实现全场变形信息覆盖,实现长距离大断面基础设施的时空双维度高精度动态监测。
动联相机网络针对长大结构变形检测需求,可将上述四类网络放置在车载平台上。以位移传递串联相机网络为例,将多像机系统固定在可移动的平台上,单次巡测过程中,随着平台的连续移动,整个长大线状工程结构的全局特征都会被采集到。为解决平台运动问题,同样构建固连约束和同名标志约束两个基本约束,根据任意两次巡测时采集到的特征点像素变化即可获取结构各个特征点在两次巡测时间间隔内的相对变形。
1.2 实验
桥梁静动态挠度监测是桥梁工程基础性需求,本文以中国某一大跨度悬索桥多点静动态挠度监测为例,论述所提出位移传递串联相机网络方法与系统的可行性与优越性。如图1 所示,该悬索桥全长1038 米,在桥梁钢箱梁内部布设了有双头相机测量与合作标志(棱镜)组成的串联相机链路,共10 个相机测站和33 个合作标志。其中,两个主塔位置处的测点作为控制点,基于上述方法原理,可获取桥梁43 个点位的实时动态位移量,实现桥梁静动态挠度精细监测。图2(a)首先给出了在桥梁1/4 跨、1/2 跨、3/4 跨的准静态精度验证结果,其中位移真值同样由上述高精度位移台提供,易得不同条件下,相机测量结果与位移台真值吻合良好,差值优于1.0 mm。图2(b)进一步对比了所提出的视觉测量系统(SCN-Dis)与徕卡全自动测量机器人(RTS)长期测量结果,易得两者在变化趋势上具有一致性,且能捕获车辆载荷引起的挠度瞬时变化值。此外,与SCN-Dis相比,RTS 所得的挠度波动明显更大,部分可达10 mm 的波动,这主要是因为RTS 是布置于桥梁上侧,受大气抖动影响明显。需要注意的是,由于SCN-Dis 不需要布置于严格稳定的平台,因此系统可以布置于主梁上,通过布设于钢箱梁中,可有效避免大气抖动、极端天气等环境的影响,这在此体现了所提出SCN-Dis 的优越性,大幅扩展了视觉测量方法的使用场景和使用思路。
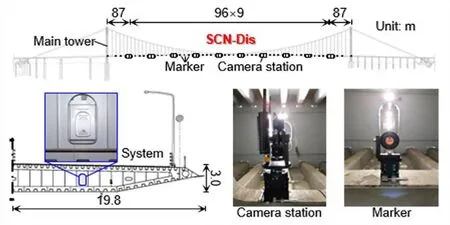
图1 现场条件与监测方案Fig.1 Field conditions and monitoring scheme

图2 挠度实验Fig.2 Deflection experiment
最终,图2(c)给出了重卡通过时所监测的桥梁全跨动态挠度响应特征,可以看到一个很明显的正弦波形演化规律,这主要得益于上述43 个测点,可以为桥梁监测评估提供精细的几何线形与动态响应数据。这是首次直接利用相机测得大跨度桥梁时空双维度多点挠度动态响应结果,在千米级测量范围实现柔性悬索桥全跨多点动态挠度压毫米级测量精度。
2 风电叶片变形测量
传统摄影测量方法难以满足风电叶片健康检测的需求,本文将相机网络摄像测量方法应用在风电叶片的监测任务中。利用相机组网技术能够实现对风电叶片这种大型结构的大尺度运动与大位移的全局测量以及小应变、裂纹损伤等微小尺度的高分辨率检测,并且能够完成这两种极端对立条件下的同时在线测量,并对测量得到的叶片运动全局运动和局部影像形貌与变形参数。通过频域和空间域等处理分析方法检测、评估风电机组叶片的健康状态,可应用于平台晃动、海面等不稳定测量平台对风电叶片和塔柱等运动耦合多目标在线三维测量。
2.1 基本原理
在工作时,将局部随动测量站分别放置于全局测量站的附近,同时对同一风电叶片组网观测,位置示意图如图3 所示。

图3 风电叶片监测相机位置示意图Fig.3 Schematic diagram of the position of wind turbine blade monitoring camera
全局运动测量站基于立体视觉原理,采用双站形式测量风力机叶片的三维运动实验中在风电叶片上制作若干个兴趣点标志,通过全局站高速相机的获取的图像以及对图像的测量分析,能够获得风电叶片的三维运动曲线。局部测量站通过跟踪叶片不同位置的转动拍摄叶片的局部损伤情况。通过图像实时跟踪算法控制随动云台跟踪叶片不同局部的转动,拍摄叶片不同区域在不同受力状态下的高清晰度图像。利用叶片上的纹理等特征点匹配,测量叶片局部在转动过程中由于受力状态变化而产生的相对变形,依据变形量的大小判别叶片局部结构的安全性。
2.2 实验
全局运动测量站由两个测量站和站间数据同步模块组成,每个测量站由相机测量单元、姿态感知单元、测距单元、运动控制单元和数据处理单元组成。相机测量单元由一个高速CMOS 相机组成,最高分辨率为5120×5120 像素,满帧条件下最高帧率为80fps,可根据不同的测量要求搭配25mm-500mm 的镜头,实现距离在500m 范围内的测量。目标风力发电机的叶片长度为 47 m,旋转直径可达 94 m,在风电叶片表面制作了10个兴趣点标志,通过高速相机获取的图像,分析图像上的兴趣点标志,能够获取风电叶片的转动速度等运动参数,可以获取兴趣点的三位运动曲线,如图4(a)所示。
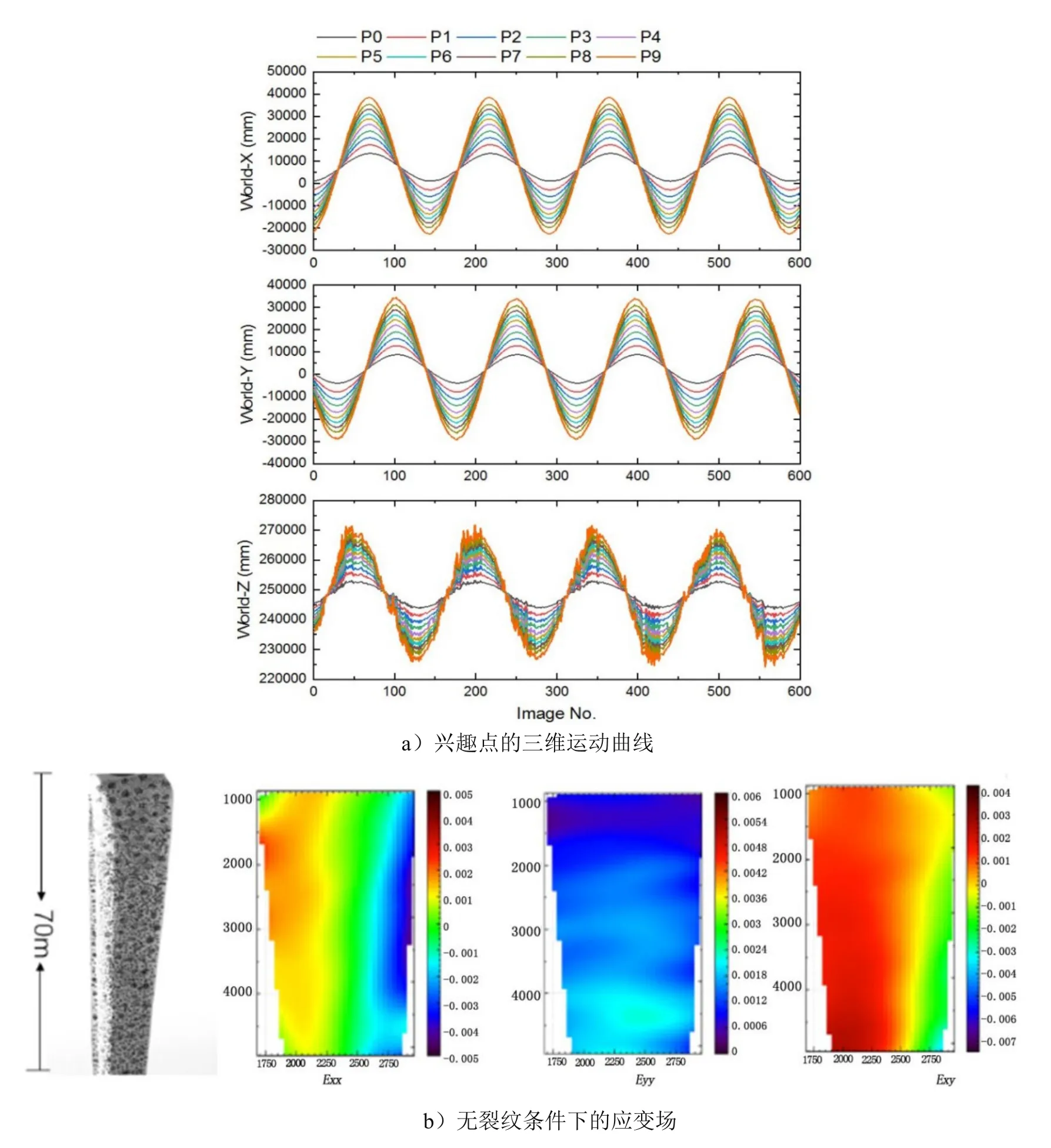
图4 风电叶片全局运动和局部变形测量Fig.4 Monitoring of wind turbine blade movement and local deformation
局部随动高分辨率测量系统能够实现双站局部变形测量、叶片扫描拼接以及根据局部应变场识别叶片裂纹。局部随动测量站由图像反馈控制的伺服双轴云台和安装200mm-500mm 定焦镜头的高分辨率高速相机(80Hz)构成,可实现20rpm以下的局部跟踪。通过拍摄叶片局部的图像。通过跟踪拍摄叶片局部在旋转过程中多个位置的图像,通过对图像上纹理特征的变形分析,即可实现对叶片的变形的测量。如图4(c)所示,由于叶片中间位置处有横向裂纹,通过对比无裂纹和有裂纹情况下应变场分布可以明显识别出叶片裂纹。
3 结论
针对大型工程和结构等广域基础设施静动态变形大尺度、高精度测量需求,本文提出了一种新的视觉测量方法与技术:相机网络测量技术,保留了视觉测量无损非接触、自动化、高精度、高动态等传统优势,同时弥补了大尺度测量像素空间分辨率低、工程环境条件要求高等不足。相机组网还能进行水下测量任务,例如航行体截面载荷研究[33]。可针对广域基础设施实现结构全域静动态变形高精度检测与监测,有效解决大尺度结构精密测量难题。本文所提出的相机网络理论、方法与技术具有极高的扩展性,可与其他监测方法绑定融合,包括但不仅限于微波雷达、激光扫描、光纤光栅,形成新的测量手段或测量系统。相关成果可为结构变形监测提供新理论和新方法,为结构安全状态评估提供新参数和新理念,为基础设施结构安全领域提供理论指导和应用验证依据测。此外,相机组网测量技术还有望与无人机等空中平台相结合,解决海上风电叶片等大型工程监测的难题。
猜你喜欢
卫星应用(2022年7期)2022-09-05 02:36:02
卫星应用(2022年3期)2022-05-23 13:44:30
卫星应用(2022年1期)2022-03-09 06:22:20
World Journal of Clinical Cases(2020年16期)2020-09-16 13:35:08
环球慈善(2019年6期)2019-09-25 09:06:24
能源(2018年6期)2018-08-01 03:42:00
能源(2018年6期)2018-08-01 03:41:56
能源(2018年8期)2018-01-15 19:18:24
风能(2016年12期)2016-02-25 08:46:38
吉林地质(2014年4期)2014-03-11 16:47:56
