
基于多目机器视觉的城市轨道交通自动化监控系统设计
2024-01-05 08:03王天予彭再云梁修惠梁修书
自动化与仪表 2023年12期
王天予,彭再云,梁修惠,梁修书
(1.重庆交通大学 交通运输学院,重庆 402260;2.重庆交通大学 数学与统计学院,重庆 402260;3.重庆航天职业技术学院 电子信息与通信工程学院,重庆 400000;4.重庆市江津区教师发展中心,重庆 402260)
城市轨道交通自动化监控系统是保障城市轨道交通安全的手段之一[1],该系统可实现城市轨道交通调度、数据管理以及与其他相关子系统进行互动,其不仅可针对城市轨道交通存在的风险进行识别,还可实现多个子系统联动[2],为城市轨道交通安全管理提供有效途径。多目机器视觉技术是通过3个或3 个以上摄像机采集目标,并对目标图像进行处理的技术,其采集目标范围较广,涵盖目标细节较多,目前多目视觉技术在交通、医学、军事等多个领域应用较为广泛[3]。在此以多目机器视觉技术为基础,设计基于多目机器视觉的城市轨道交通自动化监控系统,提升城市轨道交通自动化监控技术水平。
1 城市轨道交通自动化监控系统
1.1 系统总体结构
设计城市轨道交通自动化监控系统,系统总体结构如图1 所示。

图1 城市轨道交通自动化监控系统总体结构Fig.1 Overall structure of urban rail transit automation monitoring system
在城市轨道交通自动化监控系统中,用户通过交互层多目视觉图像采集功能向图像采集与传输层下发多目视觉图像采集指令,图像采集与传输层的同步控制卡接收到指令后,控制多目视觉图像采集模块采集城市轨道交通多目视觉图像后,通过通信接口、PDO/ODBC 接口将视觉图像保存到关系数据库内,再通过ZigBee 传感网络将视觉图像发送到逻辑运算层内。逻辑运算层接收到视觉图像后,对其进行清晰化预处理后,通过交通轨道异物侵限检测模块检测当前城市轨道交通是否存在侵限情况,同时逻辑运算层通过外部通信接口与轨道交通工作站、环控电控室、大屏幕系统等子系统相连,通过联动执行服务与实时数据管理模块实现联动管理互动和数据管理逻辑运算,然后将城市轨道交通侵限检测结果以及数据管理等结果传输到交互层内,交互层通过轨道交通异物侵限结果展示模块实时展示多目视觉监控画面,为用户呈现城市轨道交通自动化监控结果。
1.2 多目机器视觉模块硬件设计
多目机器视觉模块负责采集城市轨道交通当前运行状态图像,其是城市轨道交通自动化监控的基础硬件设备,设计多目机器视觉模块,结构如图2所示。

图2 多目机器视觉模块硬件结构Fig.2 Hardware structure of the multiocular machine vision module
多目机器视觉模块硬件结构由若干个CCD 相机、图像采集卡和下位机组成,下位机与ZigBee 传感网络和同步控制卡相连,再通过RS485 总线连接若干个图像采集卡,通过同步控制卡控制图像采集卡向若干个CCD 相机发出城市轨道交通多目机器视觉图像采集指令并将采集到的多目机器视觉图像回传到下位机。
1.3 多目机器视觉图像同步控制卡设计
多目机器视觉图像同步控制卡可控制多个CCD 相机同时采集城市轨道交通视觉图像,其关键同步问题是多个CCD 相机同步触发同一个编码器的信号输出[4],在此使用锁相环电路对CCD 相机编码器的信号进行精密细分,锁相环电路如图3所示。

图3 编码器信号精密细分锁相环电路Fig.3 Encoder signal precision subdivision of PCL circuit
当用户下发城市轨道交通多目机器视觉图像指令时,编码器接收指令信号后,将其输送至分频器1/M 内,指令信号通过分频处理后利用鉴相器将信号相位误差发送给环路滤波器,利用环路滤波器消除相位误差后[5],将指令信号发送到压控振荡器内,通过压控振荡器输出信号并将该信号反馈给分频器1/N 内,与分频器1/M 输出的信号进行比较,再对相位误差进行环路滤波循环,通过编码器信号精密细分锁相环电路后,实现CCD 相机编码器信号细分。
CCD 相机编码器信号细分后,将其输入到同步控制卡内,通过同步控制卡输出行同步信号和帧同步信号,实现若干个CCD 相机同步采集多目机器视觉图像。同步控制卡结构如图4 所示。
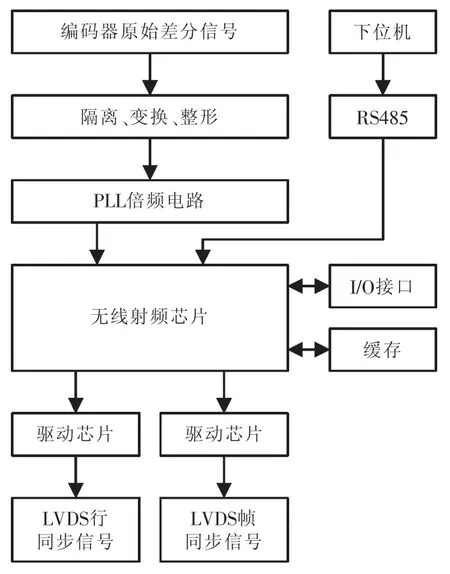
图4 多目机器视觉图像同步控制卡结构Fig.4 Multiocular machine vision image synchronization control card structure
多目机器视觉图像同步控制卡以无线射频芯片作为核心控制器,该控制器通过RS485 总线与下位机相连。将编码器原始差分信号输入到同步控制卡内,经过对信号进行隔离、变换和整形处理后[11-12],将信号输入到PLL 倍频电路内,通过驱动芯片输出LVDS 行同步信号和LVDS 帧同步信号,实现若干个CCD 相机同时采集城市轨道交通多目机器视觉图像。
1.4 ZigBee 传感网络服务器端节点设计
ZigBee 传感网络是实现城市轨道交通自动化监控系统通信传输的关键,ZigBee 传感网络服务器终端节点负责实现发现网络、加入网络以及发送各种控制命令等功能[6],设计ZigBee 传感网络服务器端节点软件流程如图5 所示。

图5 ZigBee 传感网络服务器端节点软件流程Fig.5 Software flow chart of the server-side node of ZigBee sensor network
ZigBee 传感网络服务器端节点开始运行时,端节点先上电,将端节点唤醒后令其执行通信任务同时对网络配置进行初始化,判断通信是否加入网络,若否,重新对网络进行初始化,反之则获取当前网络地址并将地址写入邻居表内;再判断网络是否收到通信指令,若没收到则返回上一步,收到指令后执行指令操作,将通信数据传输给父节点,然后判断是否发送成功,没有发送成功则返回上一步,发送成功后判断当前网络内是否还有通信任务,如果有则返回端节点上电步骤,如果当前网络内没有通信任务,则节点休眠并结束通信流程。
1.5 基于多目视觉的轨道异物侵限检测方法
系统逻辑运算层内交通轨道异物侵限检测模块使用基于多目视觉的交通轨道异物侵限检测方法实现城市轨道交通安全监控,其流程如图6所示。

图6 基于多目视觉的交通轨道异物侵限检测方法流程Fig.6 Detection method of foreign matter in traffic rail based on multiocular vision
以经过清晰预处理后的轨道交通多目机器视觉图像为基础,建立背景图像模型后,对城市轨道交通进行消影处理,然后提取轨道,确定轨道检测范围后判断轨道上是否有可疑物,如果有可疑物,对其进行多目立体视觉处理,再判断是否有异物侵限,若是则发送侵限告警并报告图像拍摄位置,然后结束流程[7]。
多目立体视觉处理是轨道异物侵限检测的关键,其通过背景差分和设置像素阈值方式实现轨道异物侵限,其过程如下所述。
令fk(x,y)表示第k 个城市轨道交通多目机器视觉图像,其背景模型由rk(x,y)表示,对fk(x,y)进行分割,则有:
式中:M(x,y)表示动态区域分割的二值矩阵,当该矩阵数值等于1 时,表示当前城市轨道交通多目机器视觉图像分割到的是前景区域,当数值等于0时,表示当前城市轨道交通多目机器视觉图像分割到的是背景区域;ϑ 表示前景背景分割阈值。
通过式(1)可将城市轨道交通多目机器视觉图像划分为2 个灰度类,分别为
式中:H0、H1均表示城市轨道交通多目机器视觉图像灰度类别,该两类的类间方差δ2(ϑ)计算公式如下:
式中:δ0、δ1分别表示类H0和H1出现的概率均值;δ表示类的概率值;P0、P1分别表示类H0和H1的概率分布。
依据式(4)确定城市轨道交通多目机器视觉图像灰度类别阈值,得到城市轨道交通多目机器视觉图像前景和背景局部最大阈值 zi、zj,选择之间的最低点 zk,然后测试当前城市轨道交通多目机器视觉图像灰度的平坦性,当 zk<ϑ 时,将zk作为分割阈值,反之ϑ 则为分割阈值。依据选择好的分割阈值,可得到城市轨道交通多目机器视觉图像灰度梯度突变的阈值变量方程,通过该方程可判断当前轨道是否存在异物,对城市轨道交通多目机器视觉图像进行像素点统计比较后,可得到异物所在位置,再设定异物位置阈值后,将异物所在位置与位置阈值作差,可得到异物所在坐标范围和是否侵限。
2 实验结果与分析
以某城市轨道交通作为实验对象,该城市轨道交通车站总数为44 座,轨道路线长度54.96 km,轨道数2 个,轨道标准为54.96 mm,日最大客流量已超100 万人次。使用本文系统对该城市轨道交通展开自动化监控,测试本文系统实际应用效果。
同步采集城市轨道交通图像是其监控的基础,验证本文系统同步采集城市轨道交通能力。以10个CCD 相机作为实验对象,向该10 个CCD 相机发送多目机器视觉图像采集命令,以延迟时间作为衡量指标。测试结果如表1 所示。分析表1 可知,应用本文系统采集城市轨道交通多目视觉图像时,其最大延迟时间仅为0.03 ms,图像同步能力较强。

表1 采集多目机器视觉图像延迟时间Tab.1 Acquisition multiocular machine vision image delay time
以某幅城市轨道交通多目机器视觉图像作为实验对象,使用本文系统对其轨道超限进行检测,检测结果如图7 所示。分析图7 可知,应用本文系统可有效检测轨道超限情况,并使用标框进行标注,具备较强的轨道超限检测能力。

图7 城市轨道交通超限检测结果Fig.7 Over-limit detection results of urban rail transit
通过系统的耦合度作为衡量系统功能指标,其耦合度数值越高说明系统运行时的稳定性能越好,测试本文系统在并发用户量不同情况下,系统的耦合度数值变化情况,结果如图8 所示。分析图8 可知,本文系统在应用过程中,其耦合度数值随着并发用户的增加而呈现降低趋势,但降低幅度较小,在并发用户数为250 个时,本文系统在应用时的耦合度数值依然高达0.95 左右,说明本文系统在实际应用过程中的耦合度数值较高,系统运行稳定性较好,受并发用户量影响较小。

图8 系统耦合度分析Fig.8 System coupling degree analysis
测试本文系统对城市轨道交通的监控能力,以4 个CCD 相机作为实验对象,给出其对应的城市轨道交通监控画面,结果如图9 所示。分析图9 可知,利用本文系统可为用户呈现不同角度的城市轨道交通监控画面,同时也可在该画面内对自动化监控数据进行管理,发送图像采集命令等,说明本文系统具备较为全面的自动化监控功能,应用效果较好。

图9 城市轨道交通监控画面Fig.9 Monitoring picture of urban rail transit
3 结语
本文设计基于多目机器视觉的城市轨道交通自动化监控系统,在该系统中利用多目机器视觉采集装置采集城市轨道交通多目机器视觉图像后,以该图像为基础对城市轨道交通侵限进行检测,保障城市轨道交通在运行过程中行人的安全。经过实验验证,本文系统运行时的耦合度数值较高,稳定性强,可有效为用户提供城市轨道交通监控画面,以及轨道超限预警。
猜你喜欢
环球时报(2022-07-13)2022-07-13
环球时报(2022-03-14)2022-03-14
中老年保健(2021年9期)2021-08-24
昆明医科大学学报(2020年12期)2021-01-26
兽医导刊(2019年1期)2019-02-21
电影(2018年8期)2018-09-21
制造技术与机床(2017年2期)2017-05-04
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
郑州大学学报(理学版)(2013年2期)2013-03-11
