
基于PLC 技术的电厂空压机机械化自动启停控制方法
2024-01-05 08:03:58于春辉
自动化与仪表 2023年12期
于春辉
(内蒙古大唐国际托克托发电有限责任公司,呼和浩特 010216)
现阶段电厂空压机的自动启停控制存在控制效果不佳等问题,提出基于PLC 技术电厂空压机机械化自动启停控制方法研究[1-2]。
文献[3]基于DCS 控制方法完成设备一键启停控制;文献[4]分析基于VCU 控制器完成设备的启停控制;文献[5]基于增量式PID 控制器完成设备启停控制。
以上述研究为基础,本文提出基于PLC 技术的电厂空压机机械化自动启停控制方法。通过本文方法的研究,可以提升电厂空压机机械化自动启停控制效果。
1 电厂空压机启停规则设计
设计电厂空压机运行的启停规则。电厂空压机联控结构模型如图1 所示。

图1 电厂空压机联控结构模型Fig.1 Structural model of power plant air compressor joint control
以多台联控的电厂空压机为例,完成电厂空压机运行启停设计如下:①启动顺序规则;②停电恢复启动规则;③故障空压机绕开规则;④加载、卸载规则;⑤停机规则;⑥轮换规则。
2 电厂空压机机械化自动启停控制设计
将空压机运行台数变化量和空压机停止时长序列作为输入变量,输入至空压机自动启停模糊控制器中完成电厂空压机的机械化自动启停控制[6]。
2.1 启停模糊控制器设计
2.1.1 启停模糊控制器结构
基于PLC 技术电厂空压机机械化启停结构,如图2 所示。

图2 电厂空压机自动启停控制结构图Fig.2 Structure diagram of automatic start stop control for air compressors in power plants
在PLC 控制器使用模糊逻辑控制算法完成电厂空压机自动启停控制,模糊逻辑控制器流程如图3 所示。完成模糊控制器设计,控制原理如图4 所示。
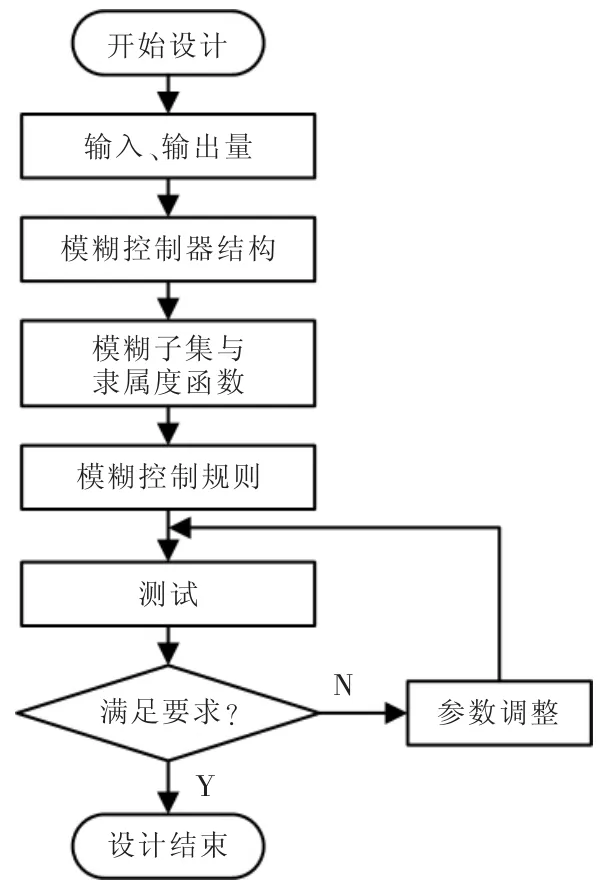
图3 模糊逻辑控制器设计流程Fig.3 Flow chart of fuzzy logic controller design
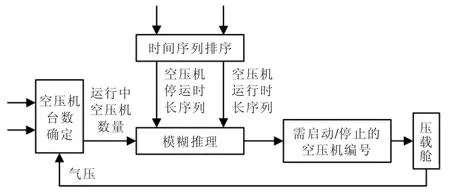
图4 模糊逻辑控制器控制原理图Fig.4 Control principle of fuzzy logic controller
2.1.2 控制变量的选择
模糊控制器寻优启动2 个输入量为空压机运行数量变化量c∈{0,1,2,3,4,5}和空压机停止运行时长序列Y′∈{1,2,3,4,5},寻优启动输出量为待启动空压机编号QQ(n)∈{1,2,3,4,5}。
模糊控制器寻优停止的2 个输入量为空压机运行数量变化量c1∈{0,1,2,3,4,5}和空压机运行时长序列Y1′∈{1,2,3,4,5},寻优启动的输出量为待停止空压机编号QT(n)∈{1,2,3,4,5}。
2.1.3 控制变量的模糊子集和隶属度函数
控制变量难以用语言描述,通过大(N)、中(Q)、小(D)、正(A)、负(M)、零(O)描述控制变量。选用3个模糊子集(O)零、(AD)正小、(AN)正大为空压机运行数量变化量,选4 个模糊子集(O)零、(PD)小、(PQ)中、(PN)大为空压机停止运行时长序列,选5个模糊子集XP、GO、DR、YJ、GP 为待启动空压机编号,对应空压机编号为1~5,表达如下:
式中:MQ(n)为待启动空压机模糊子集。
使用二维Mamdani 模糊控制器,设置寻优停止和寻优启动的输入输出变量模糊子集和隶属度函数。
2.2 变量模糊化处理
以寻优启动的空压机运行数量输入变量为例,其他输入量同理。
用c 为多个分量输入变量,ck为输入变量c 的第k 个分量,取值范围为cj∈[-c,c],输入变量第k个分量模糊域论可为mk,变化量c 的量化因子lk为变量c 到模糊论域变化为量化因子,公式如下:
设置某时刻空压机运行数量输入变量为c,映射到模糊论域,取值m,公式如下:
当设定实际取值小于寻优启动的空压机运行数量输入变量时,仍保证模糊化后的变量值属于输入控制变量分量,且m≤mk。
模糊论域取值m 为非整数和整数2 种,当模糊论域取值为非整数时,取值范围m 公式如下:
式中:sgn 为正负号;int 为整数部分。
当模糊论域取值为整数时,取值范围m 可表达为[-mk,mk]。
当寻优启动的空压机运行数量第k 个输入变量ck的取值范围为非对称性时,即ck=[s,n],且s≠n,量化因子公式如下:
公式(5)算出变量模糊论域值为N3,取值范围值为[-i,i],计算寻优启动的空压机运行数量输入变量c 比例因子,转变为实际值,获取寻优启动的空压机运行数量输入变量c 比例因子公式如下:
2.3 启停控制
根据模糊规则获取每台电厂空压机对应模糊关系矩阵,公式如下:
机制建设滞后。近年来,在“落实三转、聚焦主业”的大背景下,许多农商行进一步强化了各级纪委的监督职能,制度安排和流程配置越来越多,要求越来越高,责任越来越大。但在强调监督的同时,配套的监督机制或流程却出现滞后,主要表现为以下几点。
式中:TQ为寻优启动模糊关系矩阵;TT为寻优停止模糊关系矩阵;Iok为模糊矩阵;c、Y′为模糊关系;c1、Y1′为模糊关系;QQ(n)、QT(n)为启动和停止的输出矩阵。
寻优启动空压机模糊子集MQ(n)和寻优停止空压机模糊子集MT(n)公式如下:
式中:c(n)、c1(n)为激活n 条规则的停运空压机数量和运行空压机数量;Y′(n)、Y1′(n)为激活n 条规则矩阵输入。
通过加权平均法获取待启动空压机模糊子集中位数MQ(z)和待停止空压机模糊子集中位数MT(z),公式如下:
式中:νQ(n)、νT(n)为第n 条规则在寻优启动和寻优停止输出结果占得权重;νQ(Y′)、νT(Y1′)为第n 条规则在空压机停止运行时长序列和运行时长序列占得权重。
将待启动空压机模糊子集中位数MQ(z)和待停止的空压机模糊子集中位数MT(z)乘于比例因子,获取最终待启动空压机编号QQ(n)或停止的空压机编号QT(n)公式如下:
式中:lQ、lT为根据公式(6)获取空压机寻优启动比例因子和寻优停止比例因子。完成电厂空压机机械化自动启停控制。
3 实验与分析
在Windows 7、Intel core i7-4210H、8 GB 操作系统,编程环境为python3.7 计算机使用MATLAB软件,以某地电厂5 个空压机为对象,型号为BLT-375A 永磁变频空压机,参数如表1 所示。

表1 永磁变频空压机参数Tab.1 Parameters of permanent magnet variable frequency air compressor
以此为基础,采用基于PLC 技术的电厂空压机机械化自动启停控制开展实验测试。
(2)能耗量验证
采用所提方法对某地电厂空压机实行自动启停控制,记录能耗情况如图5 所示。
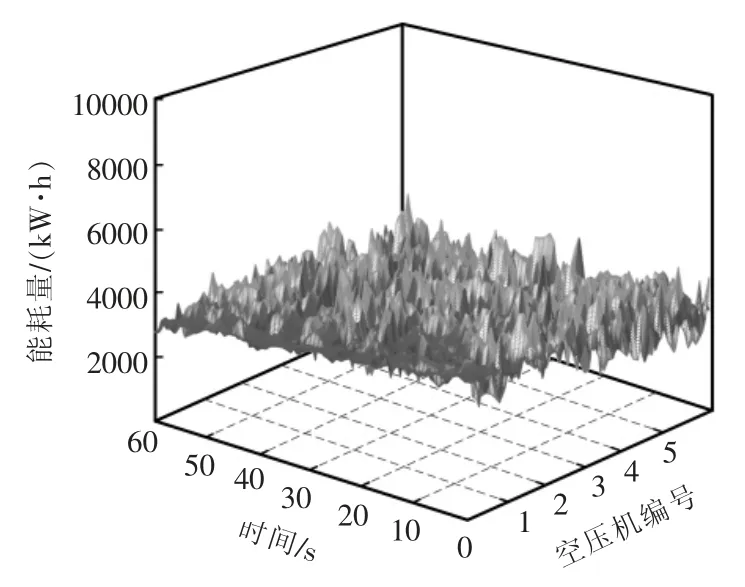
图5 能耗量Fig.5 Energy consumption
由图5 可知,所提方法的能耗量较低,表明该方法电厂空压机自动启停控制效果更佳,其主要是由于所提方法采用了基于PLC 技术的机械化自动启停控制方式。相比传统的人工启停控制方法,这种自动化控制方式可以更精确地根据实际负荷需求进行控制,避免了空压机运行过程中的能源浪费。
(3)启停控制
采用所提方法对某地电厂空压机实行自动启停控制,记录所提方法启停控制准确度如图6 所示。
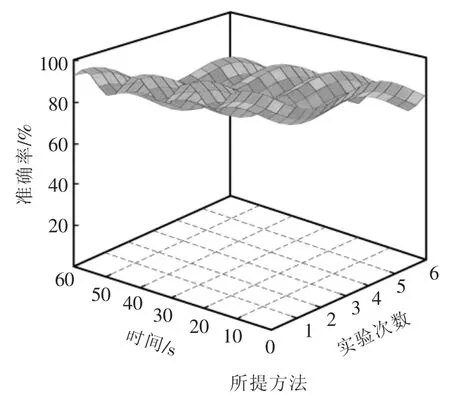
图6 启停控制准确度Fig.6 Accuracy of start stop control
分析图6 可知,应用所提方法的电厂空压机启停控制准确度在80%~98%之间,表明所提方法的启停控制准确度更高、控制效果更好,其主要是由于所提方法根据电厂多台空压机联控模型进行设计,能够根据实际负荷需求和空压机的运行状态,自动调整启停规则和模糊控制器的参数,以适应不同工况的要求,从而导致其启停控制准确度得到提高。
(4)启停控制时间对比
采用所提方法对某地电厂空压机实行自动启停控制,记录启停控制时间如表2 所示。

表2 启停控制时间Tab.2 Start and stop control time
由表2 可知,所提方法对电厂空压机的启停控制时间均小于125.8 s,空压机启停控制时间更短,其主要是由于所提方法设计了合理的启停规则和模糊控制器,能够更精确地判断空压机的启停时机,进一步缩短了启停控制时间。
4 结语
本文基于PLC 技术的电厂空压机机械化自动启停控制方法,设计电厂空压机启停规则,建立电厂空压机自动启停控制器,模糊化处理输入变量后,输入变量,完成电厂空压机启停控制。该方法研究解决传统方法存在的问题有重要意义。
猜你喜欢
语数外学习·高中版下旬(2023年7期)2023-09-25 00:45:13
安庆师范大学学报(自然科学版)(2021年1期)2021-11-28 11:06:20
南京大学学报(数学半年刊)(2020年1期)2020-03-19 02:24:44
军事文摘(2018年24期)2018-12-26 00:57:54
能源(2018年6期)2018-08-01 03:41:50
能源(2018年6期)2018-08-01 03:41:46
通信电源技术(2018年3期)2018-06-26 06:33:06
电子制作(2017年17期)2017-12-18 06:40:54
工业设计(2016年7期)2016-05-04 04:02:44
工业设计(2016年7期)2016-05-04 04:02:17
