基于飞马D2000 无人机的免像控倾斜摄影实景三维建模航测方法研究
2024-01-03 01:04:56陈伟CHENWei钱俊锦QIANJunjin
价值工程 2023年35期
陈伟CHEN Wei;钱俊锦QIAN Jun-jin
(四川中水成勘院测绘工程有限责任公司,成都 610072)
0 引言
随着无人机与数码相机技术的发展,无人机测绘近年来得到广泛应用,相比传统测绘,无人机航测具有机动高效、精细准确、适用范围广、生产周期短、成果多样等特点,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势。无人机航拍可广泛应用于国家重大工程建设、灾害应急与处理、国土监察、资源开发、新农村和小城镇建设等方面,尤其在基础测绘、土地资源调查监测、土地利用动态监测、数字城市建设和应急救灾测绘数据获取等方面具有广阔前景。飞马D2000 是基于高性能旋翼平台的一站式高精度单兵作业平台,飞马D2000 无人机具有功能多样、安全保障、操作便利等特点。本文就如何使用飞马D2000 无人机进行免像控倾斜摄影实景三维建模进行研究。
1 测区概况
测区地处西部高原,平均海拔在3000m 以上,测区高差达900m,根据任务要求需制作测区的分辨率优于5cm的实景三维模型。按照传统航测的要求,需要根据航摄间距布设像片控制点[1],并且像控点要能控制整个测区。受地形、交通等因素影响,测区布设像控点无法控制整个测区,且像控点控制范围以外的区域,其三维模型精度无法满足规范要求。加之测区植被茂盛,野生动物种类繁多,活动频繁,作业人员进入林区有较大的安全风险。为保证三维模型精度和测绘人员的人身安全,经现场踏勘后决定采用免像控作业方式进行航测,选用无人机机型为飞马D2000无人机。测区局部地形见图1。

图1 测区局部地形
2 无人机航测实景三维建模原理
三维建模原理是将相机在空中拍摄每张影像的地物纹理信息、定位信息和姿态信息通过快速影像匹配技术解算出相邻影像之间的空间关系,将影像中的各像素在三维空间中离散化形成彩色点云,利用彩色点云的几何特性通过TIN 三角构网法[2]将离散的点云连接成一个个三角形面片并形成实景三维模型中的基础模型,通常称之为白模,最后发挥点云的彩色属性根据空间位置映射白模上形成既有几何外观又有真实色彩的实景三维模型。无人机航测免像控实景三维建模是指在空三数据处理软件中无需添加像控点实现三维建模的自动化生产[3]。
3 主要设备简介
本次作业采用飞马D2000 无人机搭载倾斜摄影模块D-OP3000 进行。飞马D2000 无人机系统是深圳飞马机器人股份有限公司全新研发的一款小型、长航时且同时能满足高精度测绘遥感及视频应用的多旋翼无人机系统,可搭载航测模块、倾斜模块、可见光视频模块、热红外视频模块、热红外遥感模块等,具备多源化数据获取能力。DOP3000 是一款可见光多镜头相机模组,包含1 个下视和4 个侧视高清镜头,5 镜头总计1.2 亿像素,像元大小3.9μm,其成像清晰,镜头畸变小,很适合进行倾斜摄影三维建模作业。
4 航飞作业流程
航飞的作业流程主要包括:现场勘查、方案设计审批、空域申请、航测摄影、空三测量、三维建模。本次航飞采用飞马无人机管家系统进行航线设计和自动化飞行,现场勘查对于整个航飞作业流程至关重要,踏勘时需收集地形地貌信息、重要建筑信息、交通信息等,为无人机的起降点规划、航线规划提供资料,保证无人机飞行安全。
4.1 获取相机检校参数
根据多次的生产案例,相机检校参数是获取高精度免像控三维模型的关键因素之一。无人机搭载的相机在出厂时会有一个数码相机检校报告,但由于运输、实验场地等原因导致跟飞行区域有一定区别,所以为了获取高精度三维模型需要在飞行前对相机进行检校。为保证相机检校参数的精度,检校点的布设数量和方式参考文献[4]中像控点的布设要求。本次为获取相机检校参数的飞行分辨率为1.5cm,检校点布设了9 个,相互间距约50m。分别在瞰景科技公司的Smart3D Master 软件、Bentley 公司的ContextCapture 软件中按常规作业流程进行空三测量,空三测量完成后将相机文件导出保存备用。检校流程图见图2[5]。
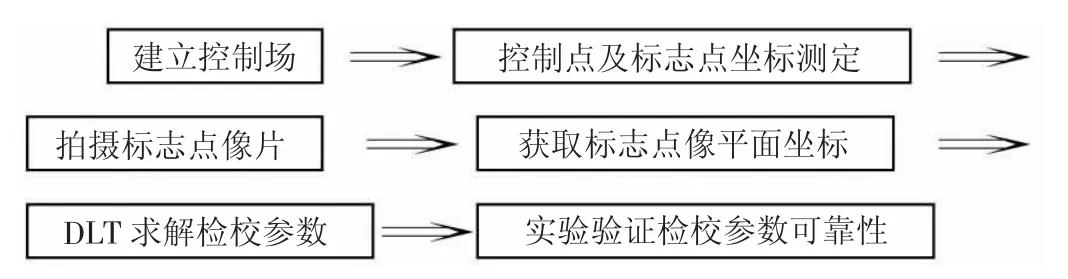
图2 检校流程图
4.2 航线设计
由于测区面积超过10km2,且测区高差大,为保证成果质量和飞行安全,需要根据地形、无人机续航时间等将测区划分位不同区块进行航飞作业。本次飞行需满足1:500 建模精度要求,根据航高计算公式H=f×GSD/a,(式中H 为飞行高度,f 为相机焦距,GSD 为地面分辨率,a 为像元大小),计算得出,无人机搭载D-OP3000 时,飞行高度不得高于320m。由于测区高差大,要满足飞行高度不高于320m 就必须进行仿地飞行。进行仿地飞行的航线规划,需要有测区的DEM(数字高程模型),航线设计软件根据DEM 对无人机的各个航点高度进行规划,无人机飞行时根据规划的航点高度进行升高和降低。飞马的航线设计软件自带全国的DEM 数据,可以直接在航线设计软件中进行仿地飞行航线设计。最终将测区划分为4 个区块,按300m 相对航高设计航线。主要飞行参数见表1。
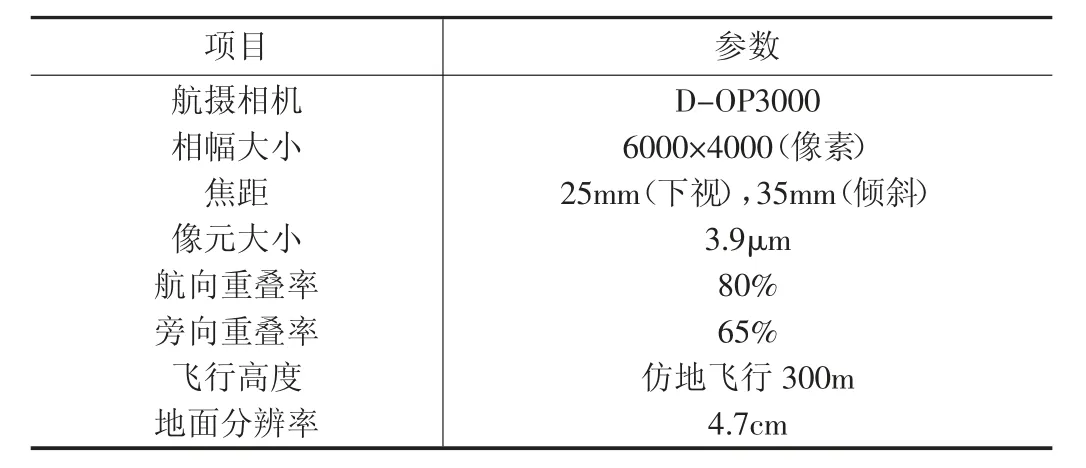
表1 飞行参数
4.3 检查点布设
为了检查本次免像控三维模型的精度,在测区共计布设了321 个检查点,检查点覆盖整个测区。检查点包括明显地物和对空标识两种。检查点坐标采用GNSS-RTK(实时动态测量技术)和全站仪坐标测量的方式进行测量。采用GNSS-RTK 测量时,根据接收机的图根测量功能,每个检查点测量时设置卫星高度截止角为15 度,PDOP<4,接收机收到至少5 颗卫星信号,单次观测的平面收敛精度不大于2cm,单次观测的高程收敛精度不大于3cm,测量3个测回,每次观测历元数不少于10 个,采样间隔2~5s,测回间GNSS 设备自动断开重连。取各次测量的中数作为最终检查点测量结果;采用全站仪坐标测量时,在全站仪中对温度气压进行改正,测量中误差不大于±5cm。
4.4 外业航飞
飞行前首先按照国家的法律、行政法规和工程所在地的地方法规及规章,向飞行管制部门提出空域申请,经批复后按照批复要求进行航飞作业。要保证成果精度满足要求,无人机POS(POS 数据指的是Positioning System Data,即定位系统数据)数据必须达到厘米级精度,通常情况下采用网络RTK 方式获取厘米级POS 数据,由于测区地处高海拔地区,网络信号不稳定,网络RTK 不能保证无人机POS 数据固定率(即达到厘米级精度的比例),故采用地面架设静态观测基站与无人机机载GNSS 观测数据来进行数据后差分处理的方式获取厘米级的POS 数据。
4.5 三维模型建模
本次飞行共划分为4 个区块,共计拍摄约20000 张影像,POS 覆盖13.9km2。由于植被茂盛,地形变化大,如果直接将全部航飞影像进行统一的空中三角测量将难以保证空三测量的成功率,故在空三测量时,根据飞行顺序、地形变化情况、照片数量划分为不同的空三区块(可不与航飞区块相同),各区块单独进行一次空三计算,然后将不同区块的空三成果合并,合并之后再次进行全测区的空三测量。目前航测内业处理软件种类繁多且各具特点,常用软件中,瞰景科技的Smart3D Master 空三算法高效,独有的分布式空中三角测量算法让测量成果更精确、稳健,实现了倾斜实景三维大数据全流程的并行处理;Bentley 公司的ContextCapture 其算法能够自动处理影像中的噪声、光照、反射等问题,生成的三维模型具有高度保真的特点。参考两个数据处理软件的特点和以往的生产经验,为得到高质量的三维模型,此次三维模型成果通过Smart3D Master和ContextCapture 生产。数据处理的具体流程为:首先将每个区块的影像、POS 数据以及准备好的相机参数对应照片组导入Smart3D Master 中进行空三,创建空三任务时候参照相机选择下视镜头影像,位置模式(POS 精度)选择高精度位置,源数据纹理选择弱,开启软件的性能模式;然后将处理后的空三成果以Blocks Exchange XML format 格式导出,导出时选择正确的坐标系并勾选输出连接点;再将空三成果分别导入ContextCapture 软件中进行合并,将合并后的区块在ContextCapture 软件进行一次整体空三,整体空三后,可以使三维模型精度更高并使全部航飞影像进行整体匀色处理;空三完成后即可开始三维建模。三维模型效果见图3。

图3 三维模型效果图
4.6 精度检查分析
本次模型精度检查根据《测绘成果质量检查与验收》规范规定,平面中误差与高程中误差按照误差差值的算术平均值计算检查点中误差,按照公式进行计算,式中M 为中误差,Δi为检查点较差,n 为检查点个数。依据《三维地理信息模型数据产品规范》可知:三维模型可视化表达的要求可以用平面精度、高度精度、地形精度、DOM 精度、模型精细度以及纹理精细度六个指标来表述。每个指标划分为不同表达级别,每个级别对应相应的技术要求。本次航测的三维模型平均分辨率为4.7cm,成图比例尺1:500,按规范要求此次三维模型的平面精度和高度精度对应等级为Ⅰ级,检查点按1:500 三维模型精度要求进行检查,平面精度限差为30cm,高度精度限差为50cm,两倍中误差为最大误差。
本次三维模型检查点分布完整覆盖整个测区,根据《测绘成果质量检查与验收》和《三维地理信息模型数据产品规范》中的规定计算统计出本次三维模型的平面点位误差最大值为16.3cm,高程点位误差最大值为10.3cm,平面中误差为5.4cm,高程中误差为3.7cm,绝大部分检查精度在10cm 以内,最大误差与中误差均满足1:500 三维模型精度要求。检查点统计表见表2。

表2 精度检查统计表
4.7 不同分辨率下免像控三维模型精度分析
为了验证在不同分辨率下免像控航测三维建模的精度,根据以上作业流程和作业方法,在不同的相对航高下,在不同的区域采用飞马D2000 无人机搭载D-OP3000 倾斜摄影模块进行其他项目的免像控三维建模处理,根据精度检查报告,得出如下结论:免像控测量时,分辨率越高精度越高,不同的分辨率下,三维建模精度均不劣于2 倍分辨率。统计情况如表3。

表3 不同项目免像控三维模型精度统计
5 结论
本项目覆盖区域广,测区地形复杂,通过三维模型成果的精度分析验证了无人机免像控技术的精度和可行性。随着无人机技术的不断发展,在日常的测绘工作当中,采用免像控作业方式可大幅度提高项目生产效率,降低项目成本,减轻测绘外业工作强度,减少测绘外业人员受伤风险。采用免像控作业方式时应注意以下几点:①相机检校参数是三维模型精度影响的关键因素之一,航测前需对无人机所搭载的数码相机进行检校,检校场地选择地形平坦的区域进行;②为确保影像的重叠率和最终三维模型的分辨率,在航飞前需提前获取测区的DEM 成果,地势变化大的地区必须采取仿地飞行;③采用地面架设静态观测基站对POS 数据进行后差分处理,确保POS 数据精度。静态观测基站的位置应避免多路径效应,远离无线电发射源和具有强烈反射卫星信号的物体,周边无大型建筑和树木等,卫星高度截止角不大于15°;④使用瞰景Smart3D Master软件空三时注意参照相机选择下视镜头,位置模式选择高精度位置,如果测区植被茂盛则勾选弱纹理模式。空三成果导出时注意选择Blocks Exchange XML format 格式导出并勾选输出连接点;⑤使用ContextCapture 软件三维建模前将合并后的区块进行一次整体空三,确保模型最终成果色彩均匀。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10 08:41:10
天津医科大学学报(2021年4期)2021-08-21 02:14:52
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
测绘通报(2019年4期)2019-05-10 08:16:20
国际呼吸杂志(2019年4期)2019-03-12 01:08:18
企业科技与发展(2018年5期)2018-09-10 00:20:39
传媒评论(2017年2期)2017-06-01 12:10:16
传媒评论(2017年2期)2017-06-01 12:10:16