
基于点云的鸡毛菜表型参数提取
2024-01-01 00:00:00刘翔鹏陆玮王丹宁郑家丰彭雨琳安康
上海师范大学学报·自然科学版 2024年4期
关键词:农业工程





摘""要:"针对人工测量作物表型结构参数不够准确的问题,提出基于双目视觉的作物表型参数提取系统. 利用鸡毛菜的叶面积和平均叶倾角两个重要表型参数,通过采集鸡毛菜原始RGB图和深度图,将原始信息合成为颜色点云后进行预处理. 采用超体素聚类的分割算法将每片叶片从作物点云中分离,并改进贪婪投影三角剖分算法,获得最佳表面重建效果,实现网格模型的颜色渲染. 在VTK库中完成网格模型的优化,获得真实感较强的鸡毛菜网格模型.在网格模型中实现对两个参数的提取,并与人工测量值比较. 对于第四组大于4 cm的叶片,自动提取的叶倾角平均绝对误差小于5.5°,验证了自动化无损监测鸡毛菜作物的可行性.
关键词:"农业工程;"双目视觉;"表型参数;"立体相机;"三维分割;"表面重建;"点云库
中图分类号:"TP 391.41 """文献标志码:"A """文章编号:"1000-5137(2024)04-0478-11
Point cloud based phenotypic parameter extraction of Chinese white cabbage
LIU Xiangpeng "LU Wei WANG Danning ZHENG Jiafeng PENG Yulin AN Kang
(1.College of Information,"Mechanical and Electrical Engineering,"Shanghai Normal University,"Shanghai 201418,"China;"2.School of Mechanical Engineering,"Shanghai Jiao Tong University,"Shanghai 200240,China)
Abstract:"A phenotype parameter extraction system was proposed to replace the inaccurate manual measurement. Leaf area and average leaf inclination angle were utilized by collecting the original RGB image and the deep-seated image of Chinese white cabbage. The data was then synthesized and passed into a color point cloud for preprocessing. Segmentation based on hypervoxel clustering was applied to separate each leaf from the crop point cloud,"and greedy projection triangulation was adopted to obtain the best surface reconstruction. As a result,"color rendering for the mesh model was realized,"for which the optimization was completed in the VTK library to obtain a more realistic model. The extraction of two parameters was realized in the grid model,"which was compared with the manual solution. For the 4th group of leaves larger than 4 cm,"the absolute error of the average inclination angle was less than 5.5°,"which verified the feasibility of automated non-destructive monitoring for Chinese white cabbage.
Key words:"agricultural engineering;"binocular vision;"phenotypic parameter;"stereo camera;"3D segmentation;"surface reconstruction;"point cloud library
0 "引言
作物表型参数的测量作为作物生长发育监测的重要环节,其在科学研究和农业生产中都具有十分重要的意义[1]. 作为作物累积生物量的指标,植物生长过程的内部信息较为复杂,而通过作物表型参数的量化可以直观地反映出植物的生长情况,为进一步研究提供数据支持. 国内学者长期以来对作物表型参数的测定主要依赖人工测量的方式,其具有接触性和破坏性,既不满足测量实时性,又会对作物本身造成破坏. 刘妍等[2]将无损检测技术应用在果蔬测量中,为农作物表型参数的实时无损测量提供了参考.
三维成像后的形状和空间结构充分展现了作物的生长状况,在提取作物表型参数上有较好的效果. 植物三维建模方法包括飞行时间(ToF)相机、激光扫描、结构光系统、光场成像和立体视觉等. 其中立体视觉、飞行相机等方法由于成本低且效率高,引起了许多研究者的关注. 何东健等[3]利用RGB相机获取玉米拔节期图像,提出了一种基于多视角立体视觉的玉米水分胁迫预测模型. WILKINSON等[4]应用一种基于树莓的摄像机系统和图像处理程序,长期、低成本地监测森林冠层动态. 张慧春等[5]通过光学相机采集拟南芥植株的二维图像序列,利用运动中恢复结构算法生成三维点云,以测量拟南芥的三维形态特征. 彭程等[6]对三维点云进行配准、骨架提取以及分割,解决温室番茄表型参数难以自动获取的问题. ANDÚJAR等[7]采用运动结构(SFM)和多视点立体(MVS)来创建三维模型,用于重建3种杂草的植物,并使用回归方法来验证具有地面真值模型的有效性. 陈柱等[8]通过聚类多视角立体(CMVS)算法和基于面片的多视角立体(PMVS)算法处理图像,生成三维点云,并对其进行三角网格化等处理,以实现植物叶片三维重建补偿. 魏天翔等[9]基于植株分割图像,使用多视图空间雕刻算法对水稻进行三维重建,并从模型中提取植株形态参数,从而进行秸秆还田后的水稻早期生长形态检测.
重建植物的三维模型后,需计算作物的表型参数. 王众司等[10]将光谱与成像合二为一,以实现植物结构、生理、生化表型的定性定量分析及其特征分布的评估. 针对高通量自动化获取的植物表型性状图像的智能检测问题,王晓婷等[11]基于迁移学习和改进掩膜区域卷积神经网络(Mask R-CNN),提出植物表型智能检测分割算法. 朱逢乐等[12]提出基于融合二维RGB 图像和深度图像的生菜表型参数高精度估算方法,以提高生菜表型参数估算模型的泛化性能. 张萌等[13]基于Relief算法和极限学习机,采用高光谱成像技术,对苹果的轻微损伤进行无损检测. 张越等[14]引入基于边界点邻域特征的边界提取算法,以得到植物叶片的边缘轮廓信息,从而进行植物叶片三维点云的特征提取及曲面重建.
新型传感系统可以提供关于植物准确且及时的生长条件信息,有助于建立更低成本、更高精度的作物三维立体模型. 已有的作物三维模型表型研究大多采用人工方式消除原始图像中的非作物点云,以减少分割难度或是去除网格模型中与表型参数计算无关的部分,无法实现自动化完成作物点云获取、作物点云与环境分离、作物器官点云分割、作物网格模型重建及作物表型参数计算.
本研究使用图漾科技的RGB-D相机FM810,针对鸡毛菜作物,提出包含作物点云获取、点云预处理、点云模型分割、网格模型重建和表型参数计算的自动化表型参数提取系统,以实现对作物表型参数的无损自动化监测.
1 "作物点云获取及分割
1.1 颜色点云生成与预处理
如图1所示,从FM810相机中直接获取原始RGB图和深度图,将两图的信息合成,并将像素点的坐标从像素坐标系转换到世界坐标系中,以获得所需要的颜色点云图. 两图呈现的信息有共同的像素坐标(m,"n)、RGB三通道颜色信息和深度信息d.
通过使用直通滤波来去除背景点,从而仅保留属于植株的点云. 但是由于设备精度、操作者的使用经验及环境条件等因素对数据采集的影响,点云获取过程中必然存在测量偏差,导致作物点云中可能存在异常值,破坏点云的准确性. 为减少异常值对点云的影响,点云库提供了异常值消除函数,滤除点云模型中的异常离群点. 其原理为:通过分析每个点邻域的统计数据,剔除其中不符合某些指标的点. 算法流程为:2次遍历点云,第一次遍历时,计算每个点到它K个近邻点的平均距离,假设点云中点之间的距离值符合高斯分布,那么这个分布函数应该由全局距离的平均值和标准差决定;第二次遍历点云,将所有的平均距离不在这个高斯分布区间内的点记为异常离群点,并将其从模型中剔除.
提取点云中的地面,如图2所示.将地面提取为PointXYZ格式的不包含颜色信息的点云,用于参数计算,同时将地面平面方程进行拟合,计算平均叶倾角.
1.2 颜色点云生成与预处理
1.2.1 体素云连接分割(VCCS)算法[15]
已有的基于图、水平集及简单线性迭代聚类的超体素方法,大部分是从二维到三维的应用扩展,没有充分利用三维图像的特征,其中,VCCS算法有更高的边界准确度和较低的欠分割误差,在计算效率上与其他的超体素聚类算法相较更优. VCCS算法生成超体素聚类的过程分为建立邻接关系、空间播种、特征计算和局部聚类.
1.2.2 局部凸连接分割算法(LCCP)分割准则[16]
点云完成超体聚类之后,对于过分割的点云需要按照特定的聚类准则生成满足分割要求的点云集. 假设物体在凹凸界面上彼此分离,LCCP分割准则通过合并由凹面边界包围的凸起区域来分割场景. 凹凸关系通过第一准则和第二准则进行判断. 其中,第一准则通过计算两个体素面的中心法向量和两个中心夹角的差值判断两片体素云边缘凹凸情况. 如图3所示,向量d为两个体素面中心的方向向量,向量n1和n2为对应两个体素面的法向量,α1和α2为方向向量d与法向量n1和n2的夹角. 若α1gt; α2,则边缘是凹边;若α1gt; α2,则边缘为凸边;若α1=α2,则边缘是平边.
考虑到实际应用时,存在点云测量噪声等干扰因素,需要引入一个阈值β0来滤除凹凸性判断的误差,即α1和α2的差值同时满足大于0,且大于β0时,判为凹面.
若按照第一准则仍不能去除噪声带来的误判,则进一步需引入另一个面进行辅助判断. 如果某个体素云和相邻两片体素云都相交,则它们各自的凹凸性必相同,即这三块体素云间同为凹连接或同为凸连接.
若相邻两面只依靠某条边上的公共点连接,则仅按第一准则判据无法判断这两个面间的凹凸性. 相邻两面是否真正连通,与向量d和向量s间的夹角θ有关,向量s为两平面法向量n1和n2的向量积,这个夹角θ越接近90°,两个面互相连通的可能性越大,关系如图4所示.
将第一准则和第二准则相结合,可判定各体素云区域间的凹凸关系,凸边需同时满足α1lt;α2,α1-α2lt;β0,且θgt;θ0,其中,θ0是某个接近但小于90°的阈值,由系数自适应计算.
在完成对各个体素云间边缘凹凸性的判定后,使用类似于区域增长的方式,将过分割的小体素云区域融合,生成大块区域. 将增长算法的限制定为边缘上的凹凸性关系,即只允许分割区域越过凸边增长,则区域增长的结果为一系列凹边包围的区域.
至此,LCCP算法执行完毕. 考虑到点云随深度的增加会变得更加离散化,难以应用八叉树数据结构计算邻接关系,故本研究在纵深方向上进行对数坐标变换,以提高算法效率.
1.3 颜点云分割结果
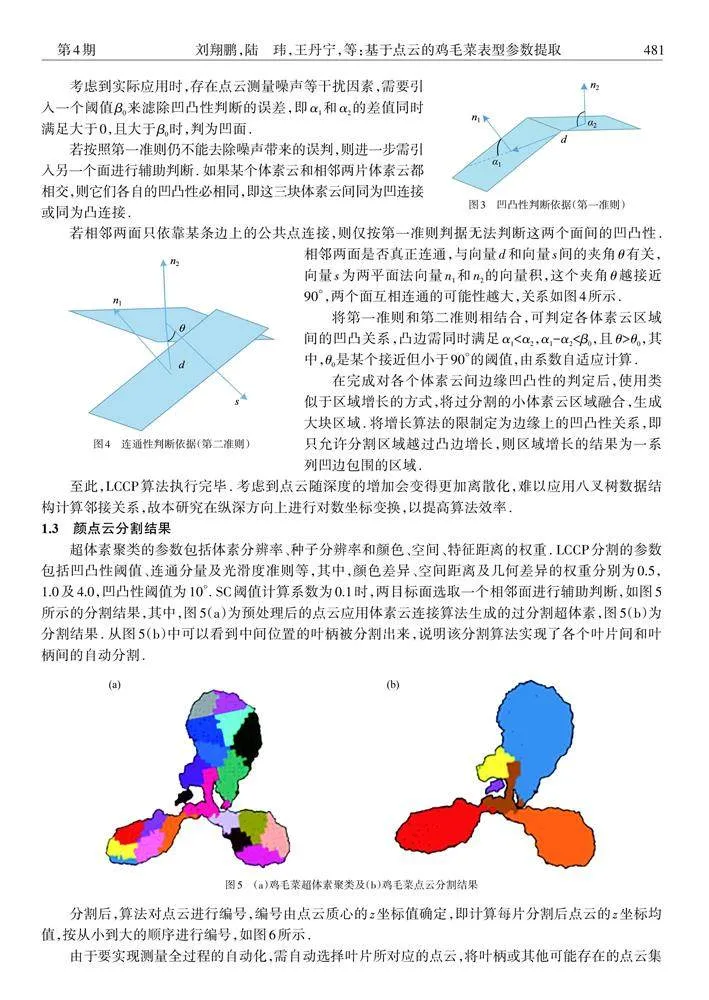
超体素聚类的参数包括体素分辨率、种子分辨率和颜色、空间、特征距离的权重. LCCP分割的参数包括凹凸性阈值、连通分量及光滑度准则等,其中,颜色差异、空间距离及几何差异的权重分别为0.5,1.0及4.0,凹凸性阈值为10°. SC阈值计算系数为0.1时,两目标面选取一个相邻面进行辅助判断,如图5所示的分割结果,其中,图5(a)为预处理后的点云应用体素云连接算法生成的过分割超体素,图5(b)为分割结果. 从图5(b)中可以看到中间位置的叶柄被分割出来,说明该分割算法实现了各个叶片间和叶柄间的自动分割.
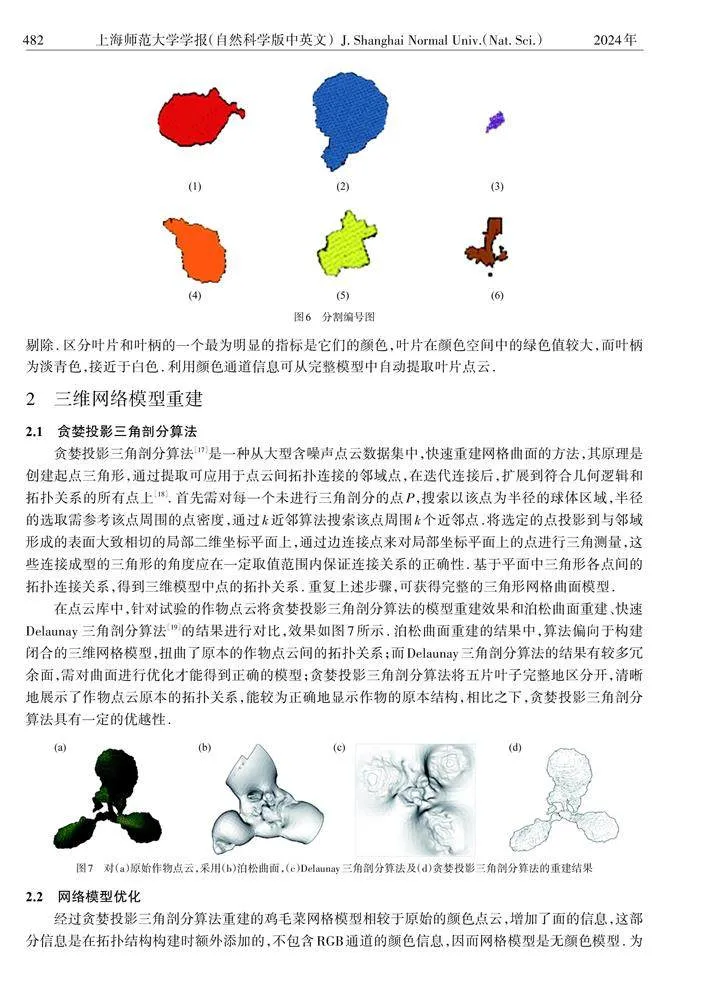
分割后,算法对点云进行编号,编号由点云质心的z坐标值确定,即计算每片分割后点云的z坐标均值,按从小到大的顺序进行编号,如图6所示.
由于要实现测量全过程的自动化,需自动选择叶片所对应的点云,将叶柄或其他可能存在的点云集剔除. 区分叶片和叶柄的一个最为明显的指标是它们的颜色,叶片在颜色空间中的绿色值较大,而叶柄为淡青色,接近于白色. 利用颜色通道信息可从完整模型中自动提取叶片点云.
2 "三维网络模型重建
2.1 贪婪投影三角剖分算法
贪婪投影三角剖分算法[17]是一种从大型含噪声点云数据集中,快速重建网格曲面的方法,其原理是创建起点三角形,通过提取可应用于点云间拓扑连接的邻域点,在迭代连接后,扩展到符合几何逻辑和拓扑关系的所有点上[18]. 首先需对每一个未进行三角剖分的点P,搜索以该点为半径的球体区域,半径的选取需参考该点周围的点密度,通过k近邻算法搜索该点周围k个近邻点.将选定的点投影到与邻域形成的表面大致相切的局部二维坐标平面上,通过边连接点来对局部坐标平面上的点进行三角测量,这些连接成型的三角形的角度应在一定取值范围内保证连接关系的正确性. 基于平面中三角形各点间的拓扑连接关系,得到三维模型中点的拓扑关系. 重复上述步骤,可获得完整的三角形网格曲面模型.
在点云库中,针对试验的作物点云将贪婪投影三角剖分算法的模型重建效果和泊松曲面重建、快速Delaunay 三角剖分算法[19]的结果进行对比,效果如图7所示. 泊松曲面重建的结果中,算法偏向于构建闭合的三维网格模型,扭曲了原本的作物点云间的拓扑关系;而Delaunay三角剖分算法的结果有较多冗余面,需对曲面进行优化才能得到正确的模型;贪婪投影三角剖分算法将五片叶子完整地区分开,清晰地展示了作物点云原本的拓扑关系,能较为正确地显示作物的原本结构,相比之下,贪婪投影三角剖分算法具有一定的优越性.
2.2 网络模型优化
经过贪婪投影三角剖分算法重建的鸡毛菜网格模型相较于原始的颜色点云,增加了面的信息,这部分信息是在拓扑结构构建时额外添加的,不包含RGB通道的颜色信息,因而网格模型是无颜色模型. 为使重建的作物网格更具可读性,需将原始作物中的颜色信息映射到网格模型上. 颜色映射算法流程如下:对原始未分割的颜色点云建立K-dimension(kd)树[20]索引,将其转化为模板点云;建立网格模型和点云模型的对应关系,对网格模型上的每一个点,搜索它在原始点云中的邻近点,求得这些点的RGB颜色通道均值,再将数据格式的点云转化回点云库(PCL)[21],最后将求得的均值转入网格模型中,如图8所示.
网格优化包含网格缩减与平滑化. 网格缩减的目的是得到简化后的网格模型,但在简化的过程中必须保持点云的拓扑连接关系不受严重影响. 网格缩减类似于图像或点云数据的降采样,可以减少网格模型中存储的面数据和点数据,从而简化网格模型的后续处理,极大地提高网格模型的计算处理效率. 顶点删除算法和边折叠算法在网格缩减上有着相近的计算效率和处理效果,故在后续处理中统一采用顶点删除算法. 由于网格重建算法功能的限制,并且点云模型本身存在的噪声,通过曲面重建得到的网格模型往往不够平滑,故需对模型进行平滑处理[22].
经过网格缩减和平滑操作优化后的鸡毛菜网格模型,已基本能展现实际鸡毛菜的生长状况. 相比于现实中的鸡毛菜,网格模型中存在缺失部分,这是由于点云获取的精度不足而导致网格重建出现偏差. 图9中,网格模型共有15 884个顶点,应用顶点删除算法定义删除网格点的比例为0.3,设置窗函数平滑算法的迭代次数为15. 平滑算法迭代执行后,网格模型已基本没有明显变化.
3 "表型参数提取方法
植物表型分析是植物结构和功能的定量分析. 在精准农业领域中,植物的表型参数是重要的数据源. 评价绿叶菜生长发育有两个重要的表型参数指标:叶面积和平均叶倾角[23]. 叶面积是指作物叶面部分的表面积总和,对应地,在网格模型中通过累加叶片网格模型中每个网格的面积得到一片叶子的面积;平均叶倾角是叶面法线与天顶轴(z轴)的夹角,即叶面与地面的夹角,在网格模型中,通过计算每个网格面片与地面夹角再求均值,得到平均叶倾角. 整个计算流程如图10所示.
计算原理如下:给定一个面片上3个点坐标分别为v1(x1,"y1,"z1),v2(x2,"y2,"z2),v3(x3,"y3,"z3),则该面片的法向量(n1,"n2,"n3)为:
当深度相机完全垂直于地面时,地面法向量为(0,"0,"1),而实际上相机拍摄的角度与该方向有较大的偏差,因此计算平均叶倾角前,需先得到地面在点云坐标系中的法线方向. 如图11所示,采用随机样本一致(RANSAC)算法[24]拟合地面,得到地面的法向量,将其代入式(3)中得到叶片单个网格对应的叶倾角,进而求得所有网格的叶倾角均值.
4 "仿真实验
4.1 实验设施与准备
实验的数据采集仪器为图漾科技的FM810系列三维RGBD相机(以下简称FM810). PCL[24]在预处理过程中实现了3D点云处理的模板化.
基于棋盘格靶标的相机标定方法[25],可以通过拍摄至少2张不同角度的图像来完成相机的标定.通过对这些图像进行分析和处理,可以确定相机的内部参数和畸变系数,从而完成相机的标定过程.
RGB-D传感器输出的深度图像在生成点云之前需要进行配准操作,以实现彩色图像和深度图像的逐点对齐. 首先,配准的目标是确定彩色相机图像像素坐标与深度相机图像像素坐标之间的变换关系.通过使用RGB相机的内参矩阵将点云换到彩色图像的像素坐标系中,以完成深度图像与彩色图像的配准.将该点坐标及其对应的深度值作为配准深度图像中的一个点,该点的颜色信息即为深度图像中对应位置的颜色信息. 通过遍历深度图像的每个像素点,生成一个完整的配准深度图像,其中每个点都对应正确的颜色信息.
4.2 实验结果及分析
如表1和2所示,无损测量的叶面积和叶倾角结果与人工物理测量的结果有较大的偏差. 由于植物这一测量对象的特殊性,人工测量的结果存在一些测量误差,较难保证准确性.在整个测量过程中,所有的处理环节都有可能造成误差,尤其是点云获取和网格模型重建的过程.
小尺寸的菜叶(如叶片3和叶片5)的面积测量误差相对较大,把它们的点云模型和现实中的叶片对比,可以发现使用的FM810传感器并未获得完整的作物点云数据,对于叶长小于4 cm的菜叶无法生成满足测量需求的点云. 这部分的误差与作物分割、网格模型重建和计算算法等没有直接联系,因此不影响本文观点. 对于大于4 cm的叶片,叶面积的平均绝对误差为负值,这表明计算面积小于人工测量面积. 原因是所提到的网格模型重建虽然看似较为平滑,符合作物本身的生长形态. 但是在模型边缘,由于点云质量问题而出现的噪声,使得叶边不齐整,导致点云和噪声点的额外连接,增加了其计算面积. 从原理上来看,人工测量的叶倾角与无损测量所得的值存在一定误差,这是因为网格模型重建过程中,在求平均叶倾角时,相当于对叶面进行了一次微积分运算,存在一定的不确定性. 而即使在网格模型质量不佳的情形下,自动无损测量仍能保证测量精度.对于第四组数据,自动提取的叶倾角平均绝对误差小于5.5°. 此外,在作物生长状态监测过程中,忽视小叶片的影响符合日常监测要求,因为几片大叶片在鸡毛菜的生长发育过程中起主导作用,它们的表型参数足以建立和作物生长状况间的关系模型.
5 "结论
本研究将相机采集的原始颜色数据和深度数据合成,并映射到世界坐标系下,获取作物的颜色点云. 使用PCL中的直通滤波和异常值过滤模块对点云数据进行预处理,应用基于超体素聚类结合凹凸性的分割算法实现自动化作物点云分割,证明这种分割算法在此类问题上有一定的优势. 对比泊松曲面、Delaunay三角网格、贪婪投影三角剖分3种常见的网格重建方法的结果,验证了贪婪投影三角剖分算法在重建效率和效果上的优势. 对重建后的网格模型,在PCL中实现点云颜色信息到网格模型的映射,应用可视化库的网格缩减算法和网格平滑化算法优化生成的网格模型,获得较为满意的作物网格模型. 使用RANSAC平面拟合分割算法得到地平面的拟合方程,并计算鸡毛菜作物的两个重要表型:参数叶面积和平均叶倾角. 通过与人工测量值对比验证表型参数测量系统的可用性. 本研究实现了对作物表型参数的无损自动化监测,对于软硬件环境及要求较低,具有一定的实际意义.
参考文献:
[1] 王泽,"周钦阳,"刘聪,"等. 基于无人机和地面图像的田间水稻冠层参数估测与评价"[J]. 作物学报,"2022,48(5):"1248-1261.
WANG Z,"ZHOU Q Y,"LIU C,"et al. Estimation and evaluation of paddy rice canopy characteristics based on images from UAV and ground camera [J]. Acta Agronomica Sinica,"2022,48(5):1248-1261.
[2] 刘妍,"周新奇,"俞晓峰,"等. 无损检测技术在果蔬品质检测中的应用研究进展"[J]. 浙江大学学报(农业与生命科学版),"2020,46(1):27-37.
LIU Y,"ZHOU X Q,"YU X F,"et al. Research progress of nondestructive testing techniques for fruit and vegetable quality[J]. Journal of Zhejiang University (Agriculture and Life Sciences),"2020,46(1):27-37
[3] 何东健,"熊虹婷,"芦忠忠,"等. 基于多视角立体视觉的拔节期玉米水分胁迫预测模型"[J]. 农业机械学报,"2020,"51(6):248-257.
HE D J,"XIONG H T,"LU Z Z,"et al. Predictive model of maize moisture stress during jointing stage based on multi-view stereo vision [J]. Transactions of the Chinese Society for Agricultural Machinery,"2020,51(6):248-257.
[4] WILKINSON M,"BELL M C,"MORISON J I L. A raspberry Pi‐based camera system and image processing procedure for low cost and long‐term monitoring of forest canopy dynamics [J]. Methods in Ecology and Evolution,"2021,12(7):"1316-1322.
[5] 张慧春,"王国苏,"边黎明,"等. 基于光学相机的植物表型测量系统与时序生长模型研究"[J]. 农业机械学报,"2019,50(10):197-207.
ZHANG H C,"WANG G S,"BIAN L M,"et al. Visible camera based 3D phenotype measurement system and time series visual growth model of plant [J]. Transactions of the Chinese Society for Agricultural Machinery,"2019,50(10):"197-207.
[6] 彭程,"李帅,"苗艳龙,"等. 基于三维点云的番茄植株茎叶分割与表型特征提取"[J]. 农业工程学报,"2022,38(9):"187-194.
PENG C,"LI S,"MIAO Y L,"et al. Stem-leaf segmentation and phenotypic trait extraction of tomatoes using three-dimensional point cloud [J]. Transactions of the Chinese Society of Agricultural Engineering,"2022,38(9):187-194
[7] ANDÚJAR D,"CALLE M,"FERNÁNDEZ Q C,"et al. Three-dimensional modeling of weed plants using low-cost photogrammetry[J]. Sensors,"2018,18(4):1077.
[8] 陈柱,"杨君. 基于三维点云的植物叶片重建及其面积估算"[J]. 传感技术学报,"2022,35(3):349-354.
CHEN Z,"YANG J. Plant leaf reconstruction and its area estimation based on 3D point cloud [J]. Chinese Journal of Sensors and Actuators,"2022,35(3):349-354.
[9] 魏天翔,"汪小旵,"施印炎,"等. 基于三维重建的秸秆地单株水稻生长形态检测研究"[J]. 南京农业大学学报,"2021,44(6):1197-1208.
WEI T X,"WANG X C,"SHI Y Y,"et al. Detection of single rice early growth morphology based on 3D reconstruction under straw returning condition [J]. Journal of Nanjing Agricultural University,"2021,44(6):1197-1208
[10] 王众司,"贾亚萍,"张瑾,"等. 多光谱成像技术在植物学研究中的应用"[J]. 植物学报,"2021,56(4):500-508.
WANG Z S,"JIA Y P,"ZHANG J,"et al. Multispectral imaging and its applications in plant science research[J].Chinese Bulletin of Botany,"2021,56(4):500-508.
[11] 王晓婷,"赵展,"王阳,"等. 基于改进Mask R-CNN的植物表型智能检测算法"[J]. 中国农机化学报,"2022,43(8):"151-157.
WANG X T,"ZHAN Z,"WANG Y,"et al. Intelligent detection algorithm of plant phenotype based on improved Mask R-CNN[J]. Journal of Chinese Agricultural Mechanization,"2022,"43(8):"151-157.
[12] 朱逢乐,"严霜,"孙霖,"等. 基于深度学习多源数据融合的生菜表型参数估算方法"[J]. 农业工程学报,"2022,38(9):195-204.
ZHU F L,"YAN S,"SUN L,"et al. Estimation method of lettuce phenotypic parameters using deep learning multi-source data fusion [J]. Transactions of the Chinese Society of Agricultural Engineering,"2022,38(9):195-204.
[13] 张萌,"李光辉. 基于RELIEF算法和极限学习机的苹果轻微损伤高光谱检测方法"[J]. 浙江大学学报(农业与生命科学版),"2019,45(1):126-134.
ZHANG M,"LI G H. Detection method of slight bruises of apples based on hyperspectral imaging and RELIEF-extreme learning machine [J]. Journal of Zhejiang University (Agriculture and Life Sciences),"2019,45(1):126-134.
[14] 张越,"翟福琪,"蔡孙宝,"等. 基于点云数据的植物叶片特征提取及三维重建"[J]. 中国测试,"2021,47(8):6-12.
ZHANG Y,"ZHAI F Q,"CAI S B,"et al. Feature extraction and 3D reconstruction of plant leaf based on point cloud data[J]. China Measurement amp; Test,"2021,47(8):6-12.
[15] 王春阳,"李国瑞,"刘雪莲,"等. 基于IVCCS的三维点云配准算法"[J]. 红外与激光工程,"2022,51(6):20210491.
WANG C Y,"LI G R,"LIU X L,"et al. 3D point cloud registration algorithm with IVCCS [J]. Infrared and Laser Engineering,"2022,51(6):20210491.
[16] 王瑞丰,"朱铮涛,"冯端奇. 基于改进LCCP的堆叠物体分割算法"[J]. 电子测量技术,"2022,45(3):118-124.
WANG R F,"ZHU Z T,"FENG D Q. Improved LCCP-based stacked object segmentation algorithm [J]. Electronic Measurement Technology,"2022,45(3):118-124.
[17] 刘翔宇,"王健,"常清法,"等. 改进贪婪投影三角化算法的激光点云快速三维重建"[J]. 激光与红外,"2022,52(5):763-770.
LIU X Y,"WANG J,"CHANG Q F,"et al. Fast 3D reconstruction of point cloud based on improved greedy projection triangulation algorithm[J]. Laser amp; Infrared,"2022,52(5):763-770.
[18] 李叶萌,"詹金辉,"席国庆,"等. 基于激光三角测量的视觉测量方法研究"[J]. 数字制造科学,"2019,17(3):"207-211.
LI Y M,"ZHAN J H,"XI G Q,"et al. Vision measurement system based on laser triangulation [J]. Digital Manufacture Science,"2019,17(3):207-211.
[19] 庞正雅,"周志峰,"王立端,"等. 改进的点云数据三维重建算法"[J]. 激光与光电子学进展,"2020,57(2):199-205.
PANG Z Y,"ZHOU Z F,"WANG L D,"et al. Improved three-dimensional reconstruction algorithm for point cloud data[J]. Laser amp; Optoelectronics Progress,"2020,"57(2):"199-205.
[20] BAHMANI B,"SUN W C. A kd-tree-accelerated hybrid data-driven/model-based approach for poroelasticity problems with multi-fidelity multi-physics data [J]. Computer Methods in Applied Mechanics and Engineering,"2021,382:"113868.
[21] YOUNG M,"PRETTY C,"AGOSTINHO S,"et al. Loss of significance and its effect on point normal orientation and cloud registration [J]. Remote Sensing,"2019,11(11):1329.
[22] TIAN J,"ZHU X,"CHEN J,"et al. Improving the accuracy of spring phenology detection by optimally smoothing satellite vegetation index time series based on local cloud frequency [J]. ISPRS Journal of Photogrammetry and Remote Sensing,"2021,180:29-44.
[23] 张亚,"耿君,"王少腾. 叶倾角分布对离散冠层反射率的影响"[J]. 遥感信息,"2021,36(4):92-99.
ZHANG Y,"GENG J,"WANG S T,"et al. Influence of leaf angle distribution on discrete canopy reflectance [J]. Remote Sensing Information,"2021,36(4):92-99.
[24] 左勇,"任阳,"杜志华,"等. 基于LP-RANSAC算法的路面点云快速移除"[J]. 激光与光电子学进展,"2023,60(14):1428009.
ZUO Y,"REN Y,"DU Z H,"et al. Rapid removal of road surface point-cloud based on LP-RANSAC algorithm [J]. Laser amp; Optoelectronics Progress,"2023,60(14):1428009.
[25] 王谭,"王磊磊,"张卫国,"等. 基于张正友标定法的红外靶标系统"[J]. 光学精密工程,"2019,27(8):1828-1835.
WANG T,"WANG L L,"ZHANG W G,"et al. Design of infrared target system with Zhang Zhengyou calibration method [J]. Editorial Office of Optics and Precision Engineering,"2019,27(8):1828-1835.
(责任编辑:包震宇)
猜你喜欢
农业与技术(2017年14期)2017-08-24 07:45:06
科技创新导报(2017年15期)2017-08-24 01:57:38
江苏农业科学(2017年8期)2017-06-30 16:14:49
科技创新导报(2017年8期)2017-06-07 19:22:08
经济师(2017年3期)2017-04-06 21:37:02
农业工程技术·综合版(2017年1期)2017-04-05 02:02:27
教育教学论坛(2016年51期)2017-03-22 14:54:10
教育教学论坛(2016年52期)2017-03-12 20:16:44
黑龙江教育·高校研究与评估(2015年1期)2015-01-20 14:35:30
天津农业科学(2014年11期)2014-12-09 17:21:34
