人机协同教育的发展演变、系统运作和结构类型
2024-01-01 00:00:00方海光孔新梅洪心舒丽丽
现代远程教育研究 2024年4期
关键词:发展阶段




摘要:人机协同教育是人机融合发展的重要体现。当前,相关研究主要聚焦人工智能技术如何重塑教育的基本理念、应用方法、实践模式等方面,较少对人机协同教育的系统运作与结构类型进行探讨。人机协同教育是一个复杂的系统,“人”与“机”关系的变化影响着整个协同教育系统的发展。纵观人类技术的发展历史,人机协同教育经历了从工具、计算机、人工智能到超级智能四个工具发展阶段,不同的工具特性带来不同的人机协同关系。在人类与机器组成的人机协同教育系统中,二者主要通过数据流在控制、传输、交互和行动环节的流转,明确彼此状态、设定共同教育目标、执行各自任务,在多轮反馈和调整中实现协同。基于协同主体的不同,智能时代的人机协同可以分为教师与数字孪生、虚拟化身、实体机器人等的协同教学结构,以及学生与数字孪生、虚拟化身、实体机器人等的协同学习结构。每种协同结构的主体都是通过相互作用来实现教育目标的。未来人机协同可能全面赋能教、学、管、研的各个方面。因此,不仅要构建人机协同教育理论体系,还要深入探索人机协同教育的发生机制、运行规律以及应用成效,通过理论和实践的互证,推动人机协同教育系统的可持续发展。
关键词:人机协同教育;发展阶段;系统运作;结构类型
中图分类号:G434" "文献标识码:A" " 文章编号:1009-5195(2024)04-0031-08" doi10.3969/j.issn.1009-5195.2024.04.004
——————————————————————————————————————————
基金项目:全国教育科学“十四五”规划2023年度教育部重点项目“人机协同视域下的‘双师课堂’教学模式构建和效果评价研究”(DCA230461)。
作者简介:方海光,博士,教授,博士生导师,首都师范大学教育学院(北京 100048); 孔新梅,博士研究生,首都师范大学教育学院(北京 100048);洪心、舒丽丽,硕士研究生,首都师范大学教育学院(北京" 100048)。
一、问题的提出
以ChatGPT为代表的生成式人工智能加速了教育数字化的发展,重构了人机协同和知识生成的方式。新一代人工智能呈现出深度学习、跨界融合、人机协同、群智开放等新特征(中华人民共和国中央人民政府,2017),大数据驱动的知识学习、人机协同的增强智能、跨媒体的协同处理等成为未来的发展重点。针对在教育教学实践中引入人机协同,当前已开展了一些理论和模型研究,如智能时代人机协同教育的哲学基础(方海光等,2022)、主体合作方式(方海光等,2024)、课堂模式(汪时冲等,2019;方海光等,2022)、学习理念(郝祥军等,2022)、群智融合与共生(许为等,2021)等。还有一些研究聚焦人机交互在教育中的应用,如ChatGPT如何支持深度探究性学习(李海峰等,2023),人机协同在多人在线游戏、知识管理和元宇宙环境中的作用(Sowa et al.,2021;Hou et al.,2023),人机协同教育在未来教育场景中的潜能(祝智庭等,2023)以及人机协同教育的技术框架(黄荣怀等,2023)等。
较多研究聚焦于人工智能技术如何重塑教育的基本理念(吕寒雪,2023;方旭等,2023)、应用方法(武法提等,2024)、实践模式(王一岩等,2024)等,较少对人机协同教育的系统运作与结构类型进行探讨。人机协同教育是一个复杂的系统(方海光等,2022),“人”与“机”主体关系的变化影响着整个协同教育系统的发展。本研究从系统论的视角,探讨人类与机器的关系随着“机”的更迭而产生的变化,并在此基础上,剖析人机协同教育系统的运作机理及结构类型,旨在为深度探究人机协同教育的发生机制提供参考。
二、人机协同教育的发展演变
1.人机协同教育中 “机”的更迭
人机协同,顾名思义指的是人与机器在工作过程中发挥各自的优势,执行各自擅长的工作,共同认识、相互制约,共同决策、相互监督(杨灿军等,2000)。人机协同的思想诞生于工业时代,是指人与机器在劳动层面的协作关系(毛刚等,2021)。近年来随着人工智能的发展,“人”与“机器”之间的协同发生了革命性的变化,超越了工业时代人与器物之间的使动关系,也超越了计算机应用的范畴,指向了人类智能和人工智能融合的高级形态(方海光等,2022;徐振国等,2024)。纵观人类技术的发展历史,人机协同教育经历了四个“机”的发展阶段,如图1所示。
图1 人机协同教育中 “机”的更迭
第一,“工具”阶段。人类主要从自然界直接获取和利用自然物进行简单加工制作形成工具。人与“工具”之间的协同过程,人类占据绝对的主导地位,人类是工具的制造者和使用者,“机”是在人类劳动活动中被动的、附属的工具,此时“人—机”关系表现为一种从属关系,而非交互式的发展关系(崔中良等,2024)。在教育学领域中,早期的“机”体现为教师使用的黑板、粉笔、教材等教具,以及学生使用的书本、铅笔、圆规等学具。
第二,“计算机”阶段。计算机可以为人类感知、记忆、计算等提供支持,并可模拟人类的决策过程。人类可以通过操作计算机完成一些重复性、单调性的任务,可以利用计算机强大的记忆能力和运算能力来辅助人类进行资源检索、作业批改、决策判断等,以减轻重复性劳动造成的认知资源浪费。
第三,“人工智能”阶段。近年来,人工智能技术快速发展,“机”能够替代人类完成更多复杂的任务。“机”本质上是对人类器官功能的延伸和拓展,是模仿和强化人类信息储存和处理能力的结果。在人类的监督和干预下,人工智能可以完成复杂的、超越人类认知范围的任务,但最终决策权在人。比如教师与机器的智能交互,是在保证教师教育主体地位基础上,充分发挥教师和机器的核心优势。
第四,“超级智能”阶段。在未来,“机”能够拥有更复杂的算法结构,在理解、学习、推理、创新和解决问题等方面将可能强于人类,成为超级智能。超级智能可以无需人类直接干预,自行做出判断并执行任务,即在人类不参与决策的情况下完全自主决策。比如学生可以在教师不参与的情况下,根据自己的学习进度和风格与超级智能直接互动,获得良好的教育体验。但是超级智能在执行过程中可能带来伦理和法律问题,存在比较大的风险,需要做好风险预防。
2.人机协同教育中人类与机器之间的关系
“人”与“机”之间的关系随着“机”的变化而不断发展。以ChatGPT为代表的生成式人工智能促进人类智能和人工智能形成人机协同新样态(王志军等,2023)。假设将人类与机器之间的接近程度定义为R0,人类智能可达的范围定义为R1,机器智能可达的范围定义为R2,我们可将人工智能时代下人类智能与机器智能之间的关系划分为如图2所示的4种情况。
图2 人机协同教育中人类与机器之间的关系
(1)独立工作。此种关系存在两种情况:一是人类与机器主体之间是竞争关系,机器以其类人的智慧与人类竞争工作机会、生存空间和社会关系(马艳华等,2022); 二是二者完全独立,互不相干,工作任务完全分离。此时人类智能与机器智能之间的关系为相离,二者的接近程度为R0>R1+R2。
(2)互为补充。此种关系下,人类与机器各有所长,协同工作,互为补充,此时二者之间的关系为相交,接近程度为R1+R2>R0>R1。例如,人工智能擅长处理复杂的计算和大样本数据,人类擅长进行复杂决策、社交和情感交流等。人工智能主要基于对训练数据的分析,完成低创造性、高重复性的工作;人类则掌握任务执行的全部信息并承担任务执行的主体责任,决定任务完成的情况。
(3)相互依赖。人类智能与机器智能各有所长又各有不足,需依赖对方来弥补自身的弱点。例如,机器因数据的有限性,无法确保做出的预测和决策的正确性,需要人类依靠经验和主观能动性来验证和指导;而人类因没有足够的精力和成本采集和分析数据,需借助机器智能来延伸和拓展人类智能。此时,人类智能和机器智能的关系为相交,二者的接近程度为R1>R0>R1-R2。人类和机器建立良好的伙伴关系,相辅相成,二者的任务属于同一性质,既有分工,又有深度交集。
(4)二者融合。随着人工智能技术的不断进步,人类智能和机器智能之间的相互依赖关系可能会进一步加深,形成一种完全的、深层次的混合协同。此时,二者之间的关系完全重叠,接近程度R0=0,人类智能和机器智能共享、协调使用信息和资源,拓展和延伸彼此的智能。
人类与机器不同的协同关系可能产生不同的协同结果。随着技术的进步和人机互动日益深入,人类智能和机器智能的界限将逐渐被打破,双向赋能和深度协同将重塑人类系统和机器系统的协同样态,推动二者形成高度融合和动态互动的协同关系。
三、人机协同教育的系统运作
人机协同教育是一个系统化协同、知识分布加工和共享,以及自组织有序发展的过程(方海光等,2022)。系统科学认为,任何系统都处在内部子系统及其环境之间的相互作用和联系中(邹珊刚等,1987,p.48)。人机协同教育系统包含机器子系统、教师子系统和学生子系统三个系统。作为一个非平衡开放的复杂系统,人机协同教育系统的演化动力主要有两类:一是人机协同教育系统与环境之间的关系。环境的不断变换和更新影响着人机协同教育系统中共生单元的走向和生成(方海光等,2024)。理想的环境能够积极地促进人机协同教育系统单元进行能量交换和物质转换。二是组成人机协同教育的人类子系统和机器子系统之间的相互关系。人机协同教育系统是一种由人类子系统和机器子系统组合而成的多层次、多维度的复合型智能系统,各子系统间具有复杂的非线性相互作用(方海光等,2022)。由于不同变量耦合在一起,处于一种互动的关系之中,组成系统的结构要素一旦发生改变,就会影响整个系统,导致人机协同教育系统失衡。人机协同教育系统在失衡中可能产生新的变量和组织,进而影响人类子系统和机器子系统之间的关系和结构。这就是人机协同教育系统中子系统之间的动态互动和深度融合的进程。
具体而言,在人机协同过程中,一方面人类将自身的行为、偏好、意见和情感等转化为数据流,反馈给机器系统(王佳航等,2024);另一方面,机器也将自身的行为、性能、倾向和决策等转化为数据流,反馈给人类系统。数据流通过控制、传输、交互和行动等环节,使人类和机器明确彼此的状态、设定共同的教育目标,然后执行各自任务(如图3所示)。协同过程中的数据流不是静态的,而是动态、实时更新的,在协同空间中不断被综合、分析和解读,不断循环。每一阶段的状态和任务执行情况都通过数据流被反馈到人类系统和机器系统中,二者通过不断调整,实现人机协同系统的动态优化和提升。
图3 人机协同教育的运作流程
(1)明确彼此状态
在开展协同任务之前,人类和机器都需要了解当前的状态,包括自身及对方在当前环境中所处的状态。一是了解自身的状态。人类通过感官来感知周围环境信息,知觉自身所处的位置、时间、情绪和任务的进程等。这种能力使人类可以快速适应不断变化的环境。而机器通过传感器如摄像头、GPS等来收集环境信息,从而分析自身所处的位置、时空、性能以及任务的进程等。同时,机器还可以利用这些数据进行推理和预测,以优化其行为和决策,从而更好地完成教育任务。二是了解对方所处的状态。人类系统和机器系统可以通过观察和交互等方式来了解彼此的情况。例如,人类和机器可以通过观察对方的行为、语言等来判断对方的情绪、意图和需求,调整双方的互动过程,以更好地满足教学活动和需求。
(2)设定共同目标
首先,设定共同目标的前提是为人类子系统和机器子系统搭建可相互理解与沟通的环境,这种环境包含对物理世界的共同理解、交互的词汇以及对事物表示的形式(Stalnaker,2002)。只有具备一致的、可供相互理解的沟通环境和机制,双方才能实现有效交互,从而形成共同的教育目标。其次,双方基于对彼此状态的了解,通过语音、文本、图像、动作等多种交互方式进行沟通。沟通过程中,人类系统和机器系统之间是一种合作博弈的关系(方海光等,2024),双方的偏好冲突越少,越容易形成共同的目标。多元便捷与恰当的交互方式不仅能减少谈判和沟通的频率,还能提高整体互动的效率。双方所形成的共同目标并不是一成不变的,其应具备动态调整的能力,可以随着问题、状态、动机和环境的变化,相应地调整和更新。每一轮的协同行为和状态都会对下一轮的目标设定产生影响,因此,在前一轮共同目标之后所形成的新目标是基于上一轮协同行为和状态的多重影响协调后的结果。这种动态调整机制有助于在不断变化的环境中确保目标的相关性和有效性。在教学任务中,确立共同的教学目标有利于提高人机协同教育系统完成教学任务的准确性,进而提升教学效果和效率。
(3)执行各自任务
在确定共同教育目标之后,人类子系统和机器子系统按照共同约定的目标,构建双边承诺,明确各自的责任和任务,分工执行行为方案。人类和机器在执行时所依赖的机制和技术不同:人类依赖于自身的生理结构和神经系统来完成复杂的行为任务,而机器则依赖于程序、数据和算法,通过预设的逻辑和计算来实现特定的功能。当双方各自完成任务后,将再次回到“明确彼此状态”的阶段,评估当前的任务进展和状态变化,进入新一轮的协同循环。在这一循环过程中,各子系统可以更好地理解对方行为背后的原因和动机,进而调节自己的行为和期望。通过多次协同循环,人类系统和机器系统通过观察和学习对方来强化自身的学习,同时调整自身的行为和策略,以更有效地引导和配合对方,形成更高层次的合作智能,在更广泛和更复杂的任务中实现高效协同。
四、人机协同教育的结构类型
人机协同教育结构是支持人机协同教学和学习的组织方式和样态。黄荣怀等(2023)在人机协同iSTAR框架中,提出了在物理空间、虚拟空间、混合空间中,人类教师与教育机器人、虚拟化身以及数字孪生有机联动的三种典型形态。其中,虚拟化身指的是一种可感知的数字表示,是特定的人实时执行的行为的一定反映(Bailenson et al.,2004);教育机器人指外观和形态同人类类似,可以与师生进行互动且可以作为共同学习者、同伴或导师等角色(Muin et al.,2021)的实体机器人;数字孪生系统由两个系统组成,即物理系统和虚拟系统,虚拟系统包含了关于物理系统的所有基本信息(Liljaniemi et al.,2020),数据在物理—数字对象之间流动,在两个方向上完全集成。
基于iSTAR框架,本研究构建了人机协同教育的6种结构类型,如图4所示。在该分类模型中,人类包含教师和学生两类,机器智能可分为数字孪生、虚拟化身和实体机器人三类,按照两两组合共形成6种人机协同教育结构。根据教师和学生的划分,人机协同教育结构可分为人机协同教学结构和人机协同学习结构两大类,人机协同教学结构又包括教师与数字孪生协同、教师与虚拟化身协同、教师与实体机器人协同三类,人机协同学习结构则包括学生与数字孪生协同、学生与虚拟化身协同、学生与实体机器人协同三类。
图4 人机协同教育的结构类型
1.人机协同教学结构分类及特征
第一,教师+数字孪生协同。数字孪生由物理系统和虚拟系统组成,数据在两个系统之间流动,虚拟系统可以表示、监控、理解和预测物理系统的状态和行为。教师和数字孪生协同教学是教师和数字孪生体共同协作承担教学工作,教师的数字孪生体与其映射的教师的真实身体完全分离,是以教师分身在场为目的而构建的独立于教师的数字化存在(张刚要等,2023)。例如,基于数字孪生的机器人远程操作平台,允许教师进行远程操作和远程编程,教师可以利用该平台配合学生完成机器人编程任务,远程指导和监控学生的学习过程(Kaarlela et al.,2022)。在这种协同教学模式下,数字孪生体通过实时数据流和动态反馈,精准地模拟和反映教师的教学行为和意图,监控物理系统中的教学进展,预测可能出现的问题,并提供实时的解决方案和建议。而且,数字孪生体的独立存在性使其可以在教师无法亲临现场的情况下,执行教学任务,确保教学活动的连续性和稳定性。
第二,教师+虚拟化身协同。教师和虚拟化身协同教学指的是教师和虚拟化身协作承担教学工作,如在视频会议中,人类教师为学习活动创建学习材料(Mizrahi et al.,2004),并借助虚拟化身来促进小组在线对话和互动。虚拟化身不仅能够在虚拟空间中完成信息共享和情感交流,还能够进行超现实的社会互动(李海峰等, 2022),引导学生讨论、回答问题、提供反馈等。此外,虚拟化身还可以通过数据分析和学习行为跟踪,帮助教师了解学生的学习状态和需求,及时调整教学策略和方法。新一代人工智能技术的应用,如ChatGPT,进一步提升了虚拟化身的功能和智能水平,可以帮助教师设定教学目标,提供精准化的教学资源和教学策略。
第三,教师+实体机器人协同。实体机器人可用于课内活动和课外活动,扮演教师的角色或同伴的角色。教师与实体机器人协同教学是由教师与实体机器人共同承担教学任务,形成的人机协同课堂。实体机器人因其高度智能化和互动性的特点,能够通过有趣和互动的方式引导儿童学习,增强学生的参与感和兴趣,可以在课堂上充当辅助教师的角色。例如,幼儿园社会辅助机器人KindSAR通过社交互动游戏辅助教师教学,促进儿童的几何思维和元认知发展(Keren et al.,2014)。实体机器人不仅能够在课堂上充当“教师”的角色,还可以为教师提供各种各样的教学资源,例如可以实时呈现学生的评价报告和班级学习情况,帮助教师更好地了解学生的学习进展和需求(汪时冲等,2019)。此外,实体机器人还可以在课外活动中扮演学生的“同伴”,参与到学生的学习和生活中。
2.人机协同学习结构分类及特点
第一,学生+数字孪生协同。学生与数字孪生协同学习是指利用数字孪生体辅助学生学习的过程。数字孪生体在物理形态、行为状态以及基本功能上与人具有同质性,能够实现两者的双向连接、映射和动态交互(褚乐阳等,2019)。数字孪生技术通过高精度的数据同步和模拟,可以在虚拟空间中真实再现学生的学习行为和状态,形成逼真的学习体验;还可以通过动态交互帮助学生更好地理解学习内容。此外,数字孪生体还能够模拟各种复杂和多变的学习情境,帮助学生在虚拟环境中进行实践和训练。例如,数字孪生体可以在虚拟实验室中模拟真实的实验过程,让学生通过交互操作,理解实验的步骤和原理,提高动手能力和问题解决能力。
第二,学生+虚拟化身协同。在学生与虚拟化身协同学习过程中,虚拟化身主要扮演导师的角色,帮助学生学习。虚拟化身基于自然语言处理技术实现与学习者的文字或语音互动,并对学习者的学习情况进行诊断,提供相应的反馈和支持。在实际应用中,虚拟化身如ChatGPT可用于学生的项目化学习,基于学生的学习需求和兴趣生成适当的学习内容,分析学生的学习背景和学习进度,协助学生制定学习目标,定制个性化的学习方案和作业测验(赵晓伟等,2023)。虚拟化身还具备情感交互的能力,能够通过语音和表情等方式传递情感支持,帮助学生在学习过程中保持积极的情绪状态。
第三,学生+实体机器人协同。实体机器人与学生在学习中的互动和交流,形成了学生与实体机器人的协同学习。为确保二者的协同效应,学生要主动将其当成学习伙伴,以一种新的方式去展开学习、获取资源(陈倩倩等,2023)。例如,学生可利用“智慧学伴”进行学习疑难问答、学情报告分析、学习督促提醒、学习陪伴激励等,帮助学习者完成不同阶段的学习目标(卢宇等,2020)。学生与实体教育机器人之间的多元交互和有机协同,可促进学生智慧和机器智能的共同增长。实体机器人通过模拟人类的情感和行为,可与学生建立起亲密的伙伴关系,为其提供情感支持和激励,帮助学生在学习过程中保持积极的情绪状态。这种人机互动不仅提高了学生的学习体验,还增强了学习的互动性和参与度。
以上6类人机协同教育结构,每一类的协同主体都是通过相互作用来实现教育目标的。然而,协同主体的数量和种类往往会因教学场景和教学需求的变化而发生变化,如双师协同课堂、三师协同课堂等,这种情况下,将形成多元复杂的人机协同教育系统以及多主体、多层次的互动和协作。任何两种协同主体之间都可能存在不同程度的相互作用,使得人机协同教育系统内部要素之间的关系和结构更加多样,其影响协同效应的因素也更为复杂。只有从复杂系统的视角去认识和理解人机协同教育系统,才能更好地把握其运作的机理,从而促成更显著的协同效应。
五、人机协同教育的应用示例
1.虚拟化身支持的人机协同自主学习
本案例呈现的是一位在校初中生课后与虚拟化身ChatGPT开展项目式学习的过程。学习目标是设计弘扬中国传统文化的方案,由学生发起对话,虚拟化身ChatGPT一步一步地引导学生思考,实现递进式的问题聚焦和迭代式的问答,最终为学生开展中国传统文化项目给出相应的建议和启示。学生与ChatGPT的生成式对话,如图5所示,这是虚拟化身支持的人机协同自主学习。
在这个项目式学习开展过程中,学生的人类智能与虚拟化身ChatGPT的机器智能相互依赖。首先,ChatGPT通过学生的问题了解学生当前的状态,然后二者基于文字交互,设定共同的目标,执行各自的任务,输出文字或图片等。人机在交互过程中不断调整对对方的理解,最终形成共同目标和任务。在此次项目式学习过程中,学生和ChatGPT进行了6轮协作,二者的关系为相交,接近程度为R1>R0>R1-R2;协同结构为分类5,协同主体为学生和虚拟化身,二者相互依赖,是良好的伙伴关系,相互影响。
图5 虚拟化身支持的人机协同自主学习
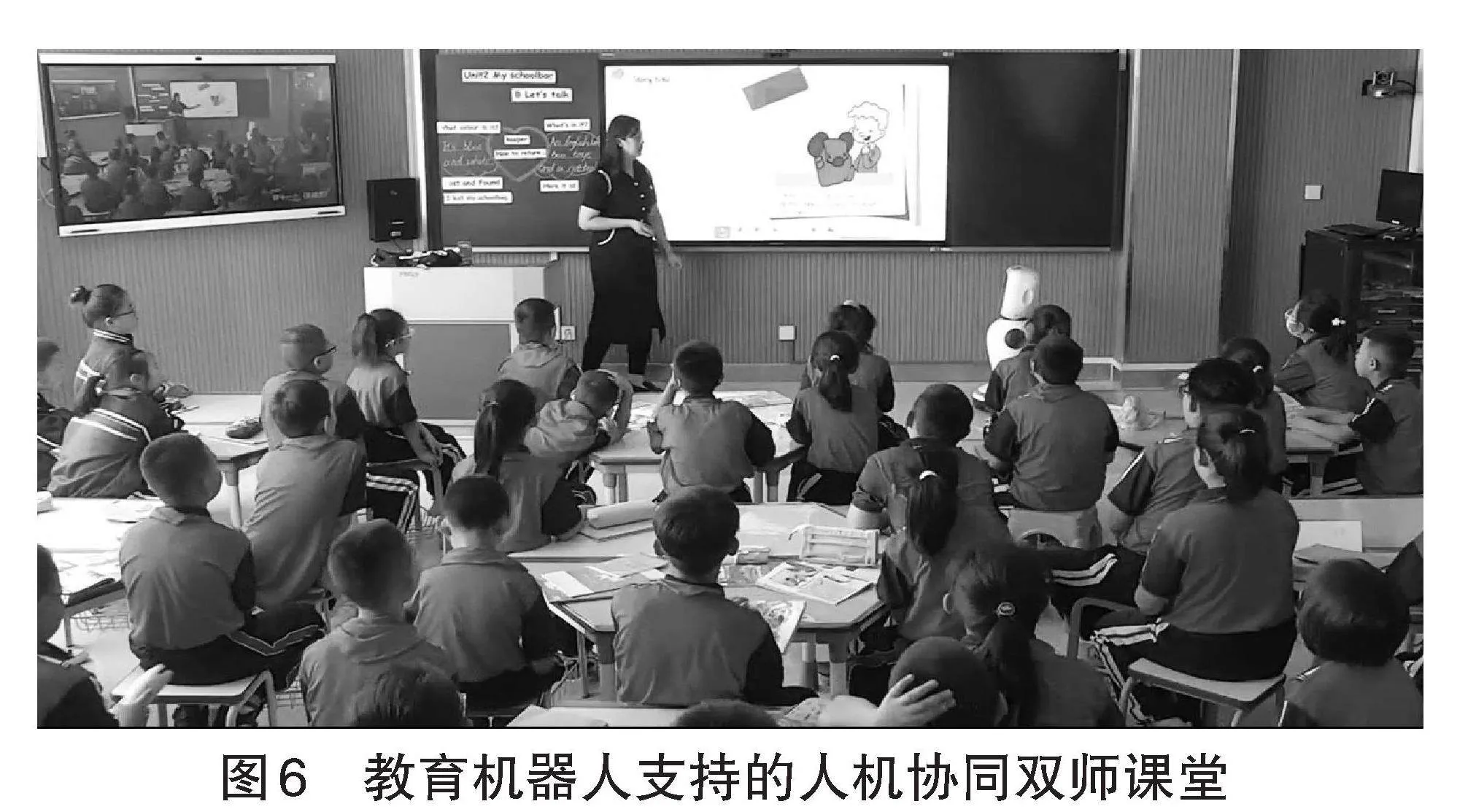
2.教育机器人支持的人机协同双师课堂
教育机器人支持的人机协同教育课堂,是人类教师和机器教师共同主导的双师课堂。其中,人类教师为一名小学四年级英语教师,机器教师为一个实体教育机器人,班级一共有30位学生,教学内容为小学四年级英语第一册“Unit2 My Schoolbag”,课程形式为“拓展学习活动”。
人机协同教育的方式为:人类教师教授My Schoolbag的学习内容,机器教师作为助教辅助人类教师引入拓展学习的练习题目,并播放图片投射到大屏。教师的人类智能和教育机器人的人工智能互为补充,二者相交,接近程度为R1+R2>R0>R1。同时,学生作答情况反馈给机器教师,机器教师根据学生学习情况给予个性化的指导。在这个教学过程中,教师、学生、实体机器人组成协同结构,共同推进教学和学习的发生。其协同主体的种类为3种,包含1位人类教师、1位机器教师和30位学生;同时存在3种相互作用:一是机器教师辅助人类教师引入拓展性练习题目,即人类教师与机器教师之间的相互作用;二是人类教师为学生解释题目并答疑解惑,即人类教师与学生之间的相互作用;三是学生将答案传输给机器教师,机器教师根据答案反馈学生,即机器教师与学生之间的相互作用。
图6 教育机器人支持的人机协同双师课堂
六、总结与展望
人机协同教育是人机融合发展的重要体现。随着人工智能技术的不断发展,未来人机协同可能走进日常教学,全面赋能“教、学、管、研”等各个方面。因此,不仅要完善相关基础理论研究,构建人机协同教育理论体系,还要从实践出发,深入探索人机协同教育的发生机制、运行规律以及应用成效,通过理论和实践的互证,推动人机协同教育系统的可持续发展。
参考文献:
[1]陈倩倩,张立新(2023).教育人工智能的伦理审思:现象剖析与愿景构建——基于“人机协同”的分析视角[J].远程教育杂志,41(3):104-112.
[2]褚乐阳,陈卫东,谭悦等(2019).虚实共生:数字孪生(DT)技术及其教育应用前瞻——兼论泛在智慧学习空间的重构[J].远程教育杂志,37(5):3-12.
[3]崔中良,卢艺(2024).劳动替代危机下人机关系的颠覆与重建[J].江汉论坛,(2):61-69.
[4]方海光,孔新梅,李海芸等(2022).人工智能时代的人机协同教育理论研究[J].现代教育技术,32 (7):5-13.
[5]方海光,孔新梅,刘慧薇等(2024).基于共生理论的人机协同教育主体合作博弈及其优化策略研究[J].电化教育研究,45(1):21-27.
[6]方旭,许磊,姜沛(2023).教师人机协同教学满意度影响因素研究——基于结构方程与模糊集定性比较分析[J].远程教育杂志,41(6):71-83.
[7]郝祥军,张天琦,顾小清(2023).智能时代的人机协同学习:形态、本质与发展[J].中国电化教育,(10):26-35.
[8]黄荣怀,刘德建,阿罕默德·提利利等(2023).人机协同教学:基于虚拟化身、数字孪生和教育机器人场景的路径设计[J].开放教育研究,29(6):4-14.
[9]李海峰,王炜(2022).元宇宙+教育:未来虚实融生的教育发展新样态[J].现代远距离教育, (1):47-56.
[10]李海峰,王炜(2023).人机协同深度探究性教学模式——以基于ChatGPT和QQ开发的人机协同探究性学习系统为例[J].开放教育研究,29(6):69-81.
[11]卢宇,薛天琪,陈鹏鹤等(2020).智能教育机器人系统构建及关键技术——以“智慧学伴”机器人为例[J].开放教育研究,26 (2):83-91.
[12]吕寒雪(2023).人机协同教学中教师身份认同的情感理路与提升路径:一个情感社会学的解读[J].电化教育研究,44(12):108-115.
[13]马艳华,张明军(2022).人工智能时代人机关系的历史演化与未来走向[J].邵阳学院学报(社会科学版),21(6):32-36.
[14]毛刚,王良辉(2021).人机协同:理解并建构未来教育世界的方式[J].教育发展研究,41(1):16-24.
[15]汪时冲,方海光,张鸽等(2019).人工智能教育机器人支持下的新型“双师课堂”研究——兼论“人机协同”教学设计与未来展望[J].远程教育杂志,37(2):25-32.
[16]王佳航,李潇(2024).嵌入、混合与协同:“运营”与算法的人机协作实践[J].现代出版,(4):61-72.
[17]王一岩,刘淇,郑永和(2024).人机协同学习:实践逻辑与典型模式[J].开放教育研究,30(1):65-72.
[18]王志军,吴芝健(2023).人工智能时代在线学习新形态——算法支持的智适应社群化学习[J].远程教育杂志, 41(5):49-55.
[19]武法提,李坦,任伟祎等(2024).基于人在回路机制的个性化作业设计:理论模型及实践理路[J].现代远程教育研究,36(1):93-100.
[20]徐振国,王悦,谢万里等(2024).人机协同教学对学生学习效果的影响——基于43项实验与准实验研究的元分析[J].现代教育技术,34(2):33-42.
[21]许为,葛列众,高在峰(2021).人—AI交互:实现“以人为中心AI”理念的跨学科新领域[J].智能系统学报,16(4):605-621.
[22]杨灿军,陈鹰(2000).人机一体化协同决策研究[J].系统工程理论与实践,(5):24-29.
[23]张刚要,陈煜(2023).从机械身体论到“在世存在”身体论:教育技术实践中的身体景观[J].电化教育研究,44(9):12-18.
[24]赵晓伟,祝智庭,沈书生(2023).教育提示语工程:构建数智时代的认识论新话语[J].中国远程教育,43(11):22-31.
[25]中华人民共和国中央人民政府(2017).国务院关于印发新一代人工智能发展规划的通知[EB/OL].[2023-12-20].http://www.gov.cn/zhengce/content/2017-07/20/content_5211996.htm.
[26]祝智庭,戴岭,赵晓伟(2023).“近未来”人机协同教育发展新思路[J].开放教育研究,29(5):4-13.
[27]邹珊刚,黄麟雏,李继宗(1987).系统科学[M].上海:上海人民出版社:48.
[28]Bailenson J. N., amp; Blascovich, J. (2004). Avatars[M]//Encyclopedia of Human-Computer Interaction. Pennsylvania: Idea Group Reference: 64-68.
[29]Hou, K., Hou, T., amp; Cai, L. (2023). Exploring Trust in Human: AI Collaboration in the Context of Multiplayer Online Games[J]. Systems, 11(5):217.
[30]Kaarlela, T., Arnarson, H., amp; Pitkäaho, T. et al. (2022). Common Educational Teleoperation Platform for Robotics Utilizing Digital Twins[J]. Machines, 10(7):577.
[31]Keren, G., amp; Fridin, M. (2014). Kindergarten Social Assistive Robot (KindSAR) for Children’s Geometric Thinking and Metacognitive Development in Preschool Education: A Pilot Study[J]. Computers in Human Behavior, 35:400-412.
[32]Liljaniemi, A., amp; Paavilainen, H. (2020). Using Digital Twin Technology in Engineering Education-Course Concept to Explore Benefits and Barriers[J]. Open Engineering, 10(1):377-385.
[33]Mizrahi, E., Danzig, N., amp; Gordon, G. (2022). vRobotator: A Virtual Robot Facilitator of Small Group Discussions for K-12[J]. Proceedings of the ACM on Human-Computer Interaction, 6(CSCW2):1-22.
[34]Muin, S., amp; Mosalam, K. M. (2021). Human-Machine Collaboration Framework for Structural Health Monitoring and Resiliency[J]. Engineering Structures, 235:112084.
[35]Sowa, K., Przegalinska, A., amp; Ciechanowski, L. (2021). Cobots in Knowledge Work: Human-AI Collaboration in Managerial Professions[J]. Journal of Business Research, 125:135-142.
[36]Stalnaker, R. (2002). Common Ground[J]. Linguistics and Philosophy, 25(5/6):701-721.
收稿日期 2024-02-25 责任编辑 汪燕
Development and Evolution, System Operation, and Structural Types of
Human-Machine Collaborative Education
FANG Haiguang, KONG Xinmei, HONG Xin, SHU Lili
Abstract: Human-machine collaborative education is an important manifestation of the integration and development of human and machine. Currently, related research mainly focuses on how artificial intelligence technology reshapes basic educational concepts, application methods, and modes of practice, with less discussion on the system operation and structural types of human-machine collaborative education. Human-machine collaborative education is a complex system, where the changes in the relationship between “human” and “machine” affect the development of the entire collaborative education system. Throughout the history of technological development, human-machine collaborative education has gone through four stages of tool development: tools, computers, AI and superintelligence. Characteristics of different tools lead to different human-machine collaborative relationships. In the human-machine collaborative education system, human and machine mainly interact through the flow of data in control, transmission, interaction and action processes, clarifying each other’s states, setting common educational goals, and executing their respective tasks, achieving collaboration through multiple rounds of feedback and adjustment. Based on different collaborative subjects, human-machine collaboration in the intelligent era can be divided into collaborative teaching structures between teachers and digital twins, virtual avatars, physical robots, etc., and collaborative learning structures between students and digital twins, virtual avatars, physical robots, etc. And subjects of collaborative structures achieve educational goals through interaction. In the future, human-machine collaboration may comprehensively empower all aspects of teaching, learning, management and research. Therefore, it is necessary not only to construct a theoretical system of human-machine collaborative education but also to deeply explore the mechanisms, operational rules and application effects of it, promoting the sustainable development of the human-machine collaborative education system through the mutual verification of theory and practice.
Keywords: Human-Machine Collaborative Education; Development Stages; System Operation; Structural Types
猜你喜欢
学理论·下(2016年11期)2016-12-27 16:34:03
商情(2016年43期)2016-12-26 00:00:00
现代营销·学苑版(2016年9期)2016-12-08 00:37:23
俪人·教师版(2016年15期)2016-11-22 04:50:41
中国集体经济(2016年27期)2016-11-19 12:29:24
青年文学家(2016年27期)2016-11-02 16:37:55
戏剧之家(2016年16期)2016-09-28 10:45:05
商(2016年26期)2016-08-10 21:57:23
中国市场(2016年20期)2016-06-12 05:37:19
大众理财顾问(2016年2期)2016-06-06 15:55:46