
基于机载LIDAR的水库库容计算
2023-12-23 04:37郜士彬汪诗奇许世民
水利技术监督 2023年12期
郜士彬,汪诗奇,许世民
(中国电建集团昆明勘测设计研究院有限公司,云南 昆明 650000)
水下地形成果对于水库、水电站、河流湖泊等的管理治理至关重要,随着我国科技技术水平发展,水下地形测量方法与设备均取得了一定突破,由最初的测深杆/尺/锤、全站仪及GNSS设备、有人船单波束、有人船多波束,发展到今天的无人单波束测量船及无人多波束测量船等高集成快速测量设备。
在测量计算水库库容方面,刘国元[1]介绍了利用CASS软件等高线法土方计算库容的方法,许晓霞[2]、王元超[3]等学者提出了使用GIS技术进行水库库容计算的方法,施春荣[4]、董闯[5]、吴凯[6]等研究了使用DEM模型计算水库库容的方法,马俊[7]使用Civil 3D中曲面分析工具进行水库库容计算,周伟[8]根据水下实测数据,推导闭合曲面的数学模型,结合Matlab软件对库容进行计算,王晓莉[9]分别使用断面法、三角网法和方格网法进行了库容计算并分析其了精度,李浩等介绍了等高线法和离散点法两种水库库容计算方法[10],苗正红利用遥感和GIS技术,提出了一种基于像元的三维水面库容计算方法[11],何亮[12]研究了一种综合CORS系统和多波束设备在水库淤积测量的方法,张金山[13]综合使用地面LIDAR和水下多波速测量技术对水库库容进行计算,唐卓君等使用GPS与无人测量船设备对水库测量,采用等高线法和DEM方格网法对库容进行计算[14],周长江[15]、陈杭[16]等使用无人机倾斜摄影和无人船技术结合的方法对库容进行测算。
以往单波束和多波束水下测量手段,激光需要通过水体传播,涉及多种传播误差,由于水下不可见,一般不容易验证其成果精度,本文提出一种基于无人机机载LIDAR的测量方法,在水库清库期间进行激光雷达扫描及摄影测量,获得海量点云和影像,通过点云分类滤波得到高精度DEM成果,结合影像数据进行地形图绘制,分别利用等高线法和DEM法进行库容计算,从而得到较为可靠准确的库容量。
1 技术流程
无人机载LIDAR(Light Laser Detection and Ranging)是激光探测和测距系统的简称,一般由激光扫描仪、GNSS定位、IMU惯导、高分辨率相机等精密设备和地面控制站系统组成。激光扫描仪发射回波脉冲获取目标的距离、反射率及斜率等信息,相机设备可以获取探测目标的高清照片信息,通过数据处理生成具有三维坐标的海量点云和正射影像成果(DOM)。LIDAR具有很强的植被穿透力和高效的作业能力,多回波技术可以快速获取高精度的地面三维坐标,高程精度可以达到cm级。
基于无人机载LIDAR水库库容测量主要作业技术流程包括空域申请、实地踏勘和航线规划、控制测量与外业航测(LIDAR数据和影像)、GNSS与IMU联合解算、数据处理(点云数据和影像)、DEM和DOM成果生成、地形图编绘(等高线生成和地物采集)、库容计算、精度检查等,如图1所示。

图1 无人机机载LIDAR测量主要技术流程
1.1 外业采集
本次测量采用了多旋翼无人机M300RTK+AlphaAir450短测程机载雷达系统,该系统配置2400万像素相机,最大测程450m,测距精度可达2cm@50m、3cm@100m,综合测量精度平面10cm、高程5cm,测量点频24万点/秒,测区范围内能达到30point/m2的点密度。无人机机载雷达系统数据采集流程如下。
1.1.1机载雷达数据采集
(1)无人机组装以及雷达系统安装,无人机组装包括脚架安装、机翼旋钮锁扣、浆叶展开以及电池安装,同时将电池卡扣上锁。雷达安装包括雷达与飞机组装、雷达天线安装以及雷达天线数据线与雷达接连。
(2)在奥维地图上选取作业区块起飞点,保证整个测区信号较好。利用WPM软件规划测区航线。
(3)GNSS基站架设,基站架设需要设置项目坐标系以及输入中央子午线;后续测定基准站点位;采样间隔设置为2HZ(0.5秒),要保证在雷达开机之前设置静态模式,在雷达关机后1-2分钟后再停止静态采集。
(4)遥控器航线按照任务调取,执行飞行任务,执行完毕后无人机返航。
(5)原始数据导出进行、数据预处理包括POS解算、平差,最终生成点云成果。
1.1.2影像数据采集
(1)像控点测量,像片控制点的目标影像应清晰,易于判刺和立体量测,一般采用油漆或腻子粉布设“L”形地标,采用RTK测量像控坐标。
(2)航摄影像采集,本次采集影像分辨率为优于0.1m,航向重叠度设为80%,旁向重叠度为65%,综合考虑照片分辨率和重叠率,仿地飞行相对航高设置为100m。
1.2 数据处理
内业数据处理包括点云数据处理和影像处理。点云处理软件为Inertial Explore和Terrasolid软件,影像处理软件主要为Context Capture Center软件,主要作业流程如图2所示。

图2 点云及影像处理流程示意图

图3 彩色点云数据

图4 DEM及等高线成果
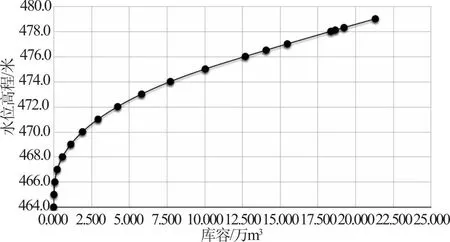
图5 水位高程-库容曲线关系图
(1)POS解算,利用Inertial Explore软件对原始点云数据和GNSS基站数据进行解算。
(2)点云滤波,原始点云通过参数转换获得要求的坐标系统和高程系统下的点云成果,点云数据通过剔除低点以及孤立点,然后通过滤波获取地面点。
(3)数据检查和编辑。由于软件自动化提取的地面点比较粗糙,通过点云数据检查和编辑对地面点进行进一步的纠正,以求获得最准确的地面点。
(4)高精度DEM及等高线成果生成。本项目根据地面点构建高精度DEM,在Terrasolid中自动生成等高线,根据比例尺设定等高距,然后进行少量的人工编辑得到等高线成果,最终获得地形成果。
(5)正射影像生成,利用Context Capture Center软件自动化生成DOM成果。
(6)成果检查,利用外业测量检查点进行数据成果质量检查,精度合格后可根据DEM和等高线计算库区库容。
1.3 库容计算
1.3.1等高线法库容计算
(1)同一高程位面积量算利用ArcGIS软件建立地形图属性数据库,属性为面积。图斑划分以封闭等高线为边界,算得的各独立图斑块的面积就是同一高程层面等高线所围面积。
(2)量算面积检查:由于采用计算机建立地形图属性数据库,各图斑面积由计算机自动量取,精度很高。为了进一步检查各图斑范围是否准确,用全库每根封闭等高线为图斑边界建立属性数据库,用于检查初始面积量算是否准确,特别注意形成孤岛部分不计入水域面积,库底凸出部分亦相同。
(3)两高程层面间的库容按以下公式(1)和(2)计算:
V=L×(A+B)÷2……IF(A-B)÷A≤0.4
(1)
3……ij(A-B)÷A>0.4
(2)
式中,L—层间高,m;A—上层面积,m2;B—下层面积,m2(A>B)。
1.3.2DEM法库容计算
主要步骤如下:
(1)利用分类地面点云按照分析范围进行提取,在Terrasolid软件的TerraModeler模块中构建surfaces model。
(2)按照分析范围构建基准平面,创建边界线,设置基准面高程为479m。
(3)使用computer quantity工具中的四棱柱和三棱柱两种方法计算水库库容。
2 工程实例
绿水河电站水库测量项目位于云南省个旧市蔓耗镇绿水河上,本项目共采集点云4个架次,获取点云9000万个,影像采集1个架次,布设测量5个像控点,获取影像226张,航飞面积约0.1km2。
按照技术流程方法进行点云滤波、点云分类、提取地面点、坐标转换、生成DEM及等高线成果,利用等高线法和DEM法进行库容计算。
水库原设计总库容32.4万m3,经1995年实测修正为26.03万m3;原设计有效库容为24.4万m3,经1995年实测修正为19.65万m3;死库容为1.98万m3。
水库不同高程面对应水库面积及库容关系见表1。由计算成果可知,水库死水位库容1.918万m3,校核总库容19.250万m3(以修正校核洪水位为准)。
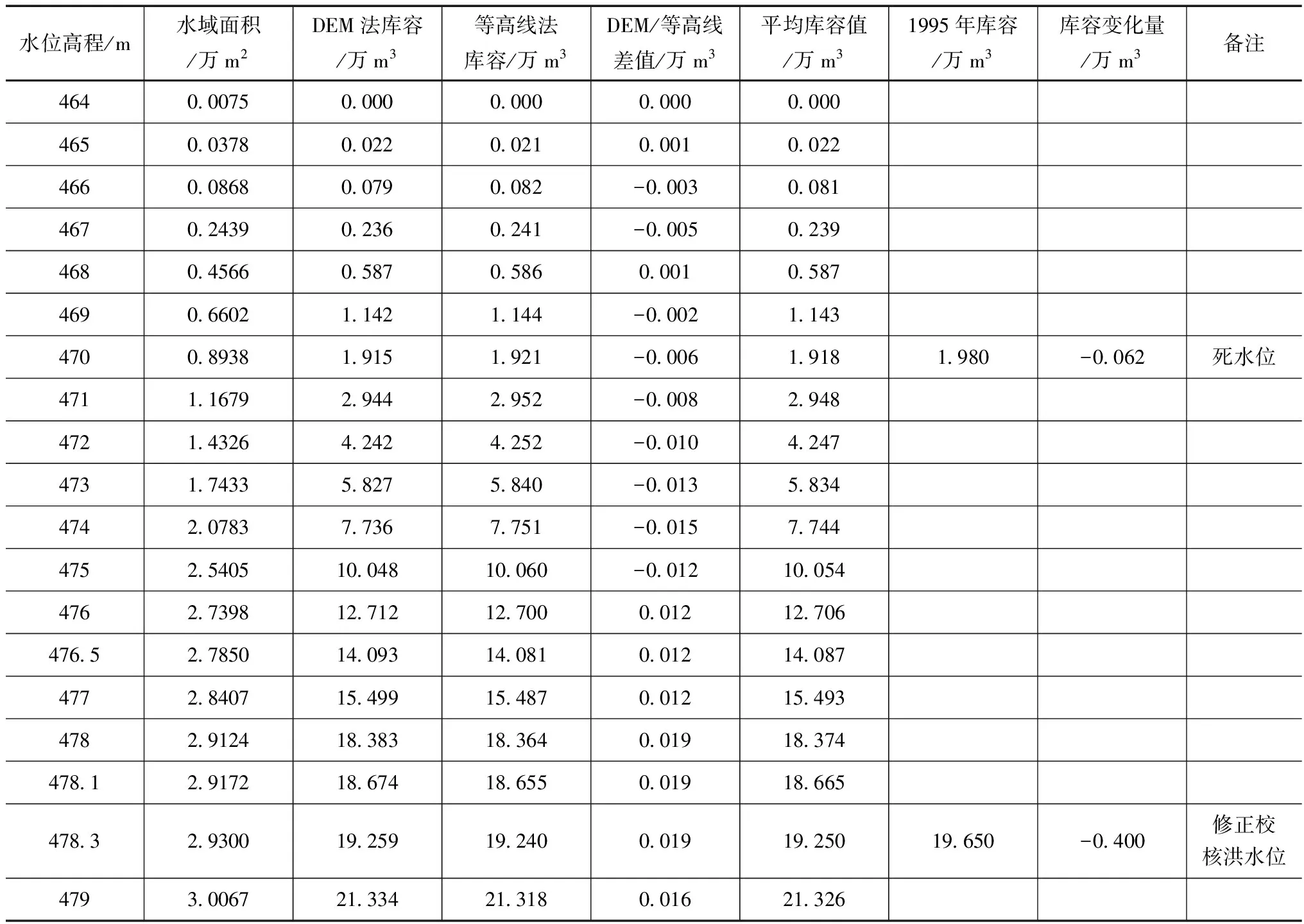
表1 DEM法与等高线法计算库容成果对比表
基于无人机机载LIDAR的水库库容测量方法,使用DEM法和等高线法进行库容计算,其结果显示差别不大,479m高程位差值为0.016万m3,占库容总量的0.08%;与1995年库容值相比,本次测量计算的库容值减少了,说明该水库1995年至今有了淤积,淤积量大概在0.4万m3。
3 结语
相对于传统水下测量方式,无人机机载LIDAR系统具有穿透力强、无接触、全天候、效率快、高程精度高、安全等特点,可以生成高精度DEM、DOM、DLG、DSM等成果,应用前景广阔。机载LIDAR在水库低水位或者清库期间进行测量,无需接触水面进行水下测量,安全可靠。不需要布设大量像控点,直接采集的地面三维坐标精度高,尤其是高程精度高且效率快;测量水库成果可直接外业验证,点云密度大,生成的DEM数据和等高线数据精度高,库容计算成果精度高,可以很好地应用在水下地形测量、库容计算、淤积测量等方面。
猜你喜欢
广东教学报·教育综合(2019年87期)2019-09-10
通信技术(2019年3期)2019-05-31
测绘通报(2019年1期)2019-02-15
电子测试(2018年6期)2018-05-09
声学与电子工程(2017年1期)2017-06-22
地理教育(2016年10期)2016-11-09
河南水利年鉴(2016年0期)2016-08-03
水利科技与经济(2016年2期)2016-04-21
四川师范大学学报(自然科学版)(2015年4期)2015-02-28
水电站机电技术(2014年3期)2014-09-26
