永磁同步电机模型预测转矩控制特性比较
2023-12-22 07:07:50安徽机电职业技术学院黄妍慧
电力设备管理 2023年22期
安徽机电职业技术学院 黄妍慧 张 振 祖 冉
永磁同步电机因其高功率密度、快速响应、体积小巧及多样的控制方式等优点,被广泛应用于诸如航空航天、工业伺服以及新能源汽车等高性能的交流控制系统中。相比于传统的磁场定向矢量控制,直接转矩控制响应速度更快、结构更为简单、转矩直接闭环等优点,使得直接转矩控制及其衍生控制成为当下研究的热点。但是直接转矩控制的缺点是转矩波动比较大,很难达到最优的效果,于是,从抑制转矩脉动的角度考量,可以在直接转矩的控制中引入模型预测的思想,构成了模型预测转矩控制。
模型预测转矩控制对于磁链和转矩的脉动有较好的抑制作用,但计算出的磁链和转矩与给定值还是会有一定的误差,这会给电机控制系统带来不稳定。为了减轻这种不良影响,本文在预测转矩控制中引入了占空比调制,即在控制周期内同时利用一个有效矢量和零矢量。这种方式扩大了可选矢量的范围,有助于减少转矩的波动,并增强控制系统的稳定性。为了比较连续集、单矢量有限集、基于占空比的预测转矩控制的特性,做了试验分析。
1 连续控制集模型预测控制策略
1.1 连续控制集
所谓的连续集模型预测控制,是把所有的空间电压矢量构成的集合成称作连续集。在连续控制集中,备选矢量要跟相应的调制技术相结合,也就是前面所说的空间脉宽调制技术SVPWM。在调制的过程中,需要用到平均值原理和高频合成原理,下文对这两种原理进行介绍。逆变器的输入输出之间的关系可以表示为:
其中,v0是逆变器输出的电压矢量,s(t)是电压矢量v0所对应的开关管开关信号。
平均值原理指出,逆变器在特定周期内根据预设原则进行开关控制。当逆变器在低频状态下运行时,其输出表现为周期性电压的平均值。也就是说,当逆变器在高频段工作时,如果开关管的占空比随着低频函数m(t)变化,那么每个周期内逆变器的电压平均输出值是:
如果逆变器输出的电压是任一相角和幅值的,则可以表示为:
由式(2),占空比函数m(t)可以表示为:
在此过程中,占空比函数m(t)通过与SVPWM 相结合进行调制,最终能够生成任意相角和幅值的电压矢量,从而构建出模型预测控制的连续集。
1.2 寻优策略
定义评价函数为:
为了使评价函数最小,最优的连续集模型预测控制算法为:
图1是连续控制集模型预测转矩控制的算法框图。
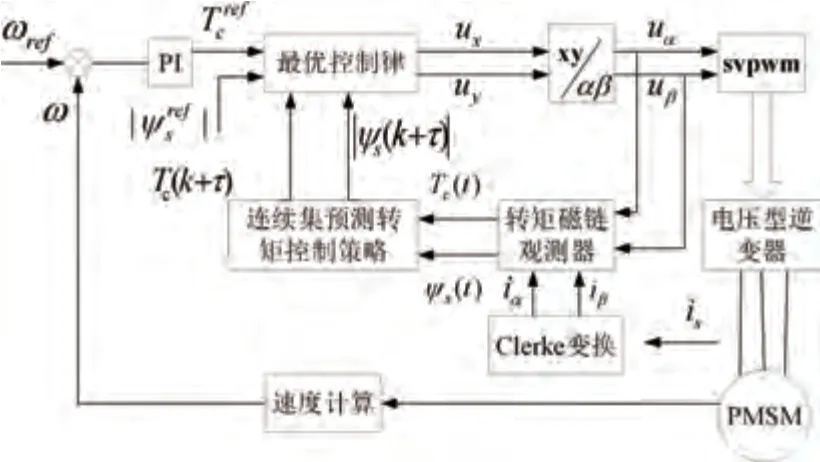
图1 连续控制集模型预测转矩控制系统框图
2 有限集模型预测转矩控制
有限集模型预测转矩控制策略的主要思想是:在电压型三相逆变器中,开关管的开关状态组合共有八种不同的可能性。这八种组合分别对应于八个不同的电压矢量,选择这八个电压矢量作为基础矢量来构建一个有限集合。随后,对永磁同步电机的数学模型进行离散化处理,推导出预测转矩的模型。在设计评价函数时,需要考虑定子磁链和电磁转矩的实际值与预测值之间的误差项。在永磁同步电动机预测模型中引入8个交流电压矢量的有限集合,预测下一时刻的定子磁链和电磁转矩响应,再用穷举法,将评价函数作为评价的标准,从有限集的所有备选矢量选取最优的电压矢量作用到PMSM 上,控制电机的运转。
2.1 预测模型
八种开关组合可以得到六种位置、幅值均固定的非零电压矢量和两种零矢量,将这八种电压矢量分布在六边形的扇形区里,在αβ 坐标系下,一共可以产生七组有限的ua、uβ定子电压,分别对应着八种基本电压矢量。以八个基本电压矢量创建有限集,可以写为:
在αβ 坐标系下,PMSM 的定子电压公式可以写为:
其中,ua、uβ是定子电压在αβ 的轴分量,ia、iβ是定子电流在αβ 的轴分量,Ψa、Ψβ是定子磁链Ψs在αβ 的轴分量,R 是定子绕组的电阻。
定子磁链和电磁转矩可以写为:
其中,Tc是电磁转矩,p 是电机的极对数,|Ψr|是转子磁链的幅值,通常情况下忽略磁饱和与温度的影响,|Ψr|可以视作常数,θr是α 轴与转子磁链Ψr之间的夹角。
对式(9)作离散化处理,可以得到:
Ts是控制周期,uia、uiβ是有限集中第i 个备选矢量经过式(9)、式(10)处理后在αβ 的轴分量,Ψpa(k+1)、Ψpβ(k+1)是在第(k+1)Ts时刻,第i 个基本矢量施加后所得预测的磁链值在αβ 的轴分量,Ψps(k+1)是定子预测磁链值的大小。
其中把式(9)代入到式(7)中,可以得到:
其中,ipa(k+1)、ipβ(k+1)是在第(k+1)Ts时刻,第i 个基本矢量施加后的定子电流预测值在αβ 的轴分量。
将式(12)代入到式(10),有:
Tpc(k+1)是在第(k+1)Ts时刻,第i 个基本矢量施加后的预测电磁转矩的值。
2.2 最优矢量选择
有限集的预测转矩策略的评价函数可以表示为:
在有限集预测转矩策略中,利用PI 控制算法由转速控制器得出电磁转矩的参考值。对于表贴式永磁同步电机,考虑到空载运转时的损耗,笔者近似认为定子磁链和转子磁链的参考幅值相等。而对于内嵌式PMSM,为了提高工作效率,需要在定子电流固定的条件下追求最大的转矩输出,这正是最大转矩电流比原则的应用。在传统的有限集模型预测转矩算法中,引入了占空比控制方式以提升对磁链和转矩的控制精度。这个过程首先利用评价函数从有限的控制集中选择最优矢量,然后根据具体的控制要求来确定占空比。一般情况下,占空比的计算方法有多种,例如有效值法、平均值法、无差拍法。通常情况下将没有加入占空比算法的叫做单矢量有限集模型预测转矩控制。
3 引入占空比的模型预测转矩控制
在kTs时刻,PMSM 采集到的电压、电流以及转速的信号在一个控制周期内是保持不变的。选取八个备选的基本电压矢量,并将其代入PMSM 预测转矩模型的式(11)和式(13),得到八组不同的磁链和转矩预测值。然后,通过评价函数选择最优的电压矢量。在引入占空比的转矩预测控制中,还需要计算最优矢量的占空比。图2是PMSM 有限集转矩预测控制的系统框图。
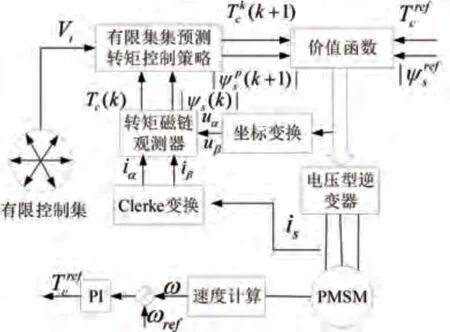
图2 有限集预测转矩控制系统框图
这里的定子磁链观测器及电磁转矩观测器均采用电压型观测器,可以表示为:
4 试验验证
4.1 平台介绍
永磁同步电机的控制系统采样频率为10kHz。表1是电机的参数。

表1 电机参数
4.2 试验结果分析
连续集预测转矩控制、单矢量有限集预测转矩控制、占空比有限集预测转矩控制从静止到额定速度的启动响应。转矩、磁链、三相电流三种控制方式都有非常相似的动态响应,且响应迅速,这说明三种控制策略都有模型预测转矩的快速动态响应特性。
连续集预测转矩控制、单矢量有限集预测转矩控制、占空比有限集预测转矩控制稳定操作特性。转矩、磁链、三相电流单矢量有限集控制在稳态时,转矩波动范围较大,定子电流畸变严重;连续集转矩预测的控制精度具有比较高,转矩波动较小,定子电流平滑连续,毛刺小;带占空比的有限集转矩预测控制相对于单矢量有限集转矩预测控制而言,具有较强的抑制波动能力,转矩波动范围较小,定子电流畸变较小。
试验结果表明,采用基于单个向量有限控制集的转矩预测控制策略时,电磁转矩的波动较大,同时定子电流的畸变也较为严重。相比之下,基于占空比有限控制集的转矩预测控制策略对电磁转矩的控制效果更为出色,同时能够缓解定子电流的畸变。而相比有限控制集策略,连续控制集转矩预测控制策略在电磁转矩和定子磁链的控制精度方面表现出了更高的性能。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
防爆电机(2021年1期)2021-03-29 03:02:46
测控技术(2018年2期)2018-12-09 09:00:52
现代防御技术(2016年1期)2016-06-01 12:13:28
电测与仪表(2016年10期)2016-04-12 00:26:38
新高考·高一物理(2016年1期)2016-03-05 22:47:39
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电机与控制应用(2015年10期)2015-03-01 03:50:16
电测与仪表(2014年23期)2014-04-04 12:08:30
电测与仪表(2014年11期)2014-04-04 09:21:36