
基于无人机倾斜摄影的城市建设规划核实方法研究
2023-12-21 12:18:02谢小梅
工程建设与设计 2023年23期
谢小梅
(龙岩市勘察测绘大队,福建 龙岩 364000)
1 引言
城市建设规划核实工作目前所应用的规划核实方法基于测距仪、全站仪等,存在着投入大、效率低的劣势,而无人机倾斜摄影技术的引入将实现效率与成本双控目标。借助此项技术可形成三维实景模型的应用效果,在采集待测区域或项目的相关要素后,将动态展现建筑区域的形状、高度和位置信息,对于核实测量成果有着正向作用。
2 工程概况
以某建设项目为例,研究基于无人机倾斜摄影技术的城市建设规划核实方法。本项目规划用地红线面积308 213.34 m2。本次测区具体范围:东至蒋武路,南临瓦饶溪,西临龙岩北出口,北至北外环。测区为厂房,房屋以车间为主,周围居民地较密集,测区困难类别为Ⅱ类区。作业中遵循技术规划书中的原则,按地形、地物要素的采集、表示要求进行了测绘,采用全站仪、无人机等设备进行数据采集,通过EPS 三维测图系统绘制1∶500 的地形图。
3 基于无人机倾斜摄影的城市建设规划核实方法
3.1 无人机倾斜摄影模型建立
模型建立的基本流程为:现场勘查,布设像控点→航线设计→影像检查与预处理→空三加密→纠正DSM,生成TDOM→生成实景三维模型→规划要素采集。
规划核实测量工作展开需以区域内的三维模型为参照,通过现场勘查作业区域,并结合规划范围布置像控点[1]。飞行前要充分了解现场情况,结合地空状况布控飞行轨迹和路线。采取动态检查的控制办法,拨正飞行区域完全覆盖核实范围,根据质量要求监测在无人机飞行期间准确记录发回的影像数据。完成飞行任务后,在软件中输入倾斜相片、位置数据、传感器参数和相机参数,并进行预处理,检查影像质量,人工建立影像与控制点间的关系,匹配多视影像。构建航摄像机、航摄地物和航摄相片间的关系,完成测量空中三角的任务,整体对不规则三角网加密。纠正DSM 影像,生成TDOM,获取模型结构。利用纹理修正方法,使得到的实景三维模型更为准确和精细[2]。结合实践经验可知,采集规划下模型规划像素要根据影像地面分辨率而定,当超出0.02 m 时,应当进行采集,如此可将精度控制在0.02 m 以下。
布控像控点要根据无人机倾斜摄影规范确定,尽可能挑选视野开阔的区域作为像控点,避免因其他物体遮挡像控点。地物选择要满足不易移动和被破坏的要求,保证外控点标识特征明显。在本工程中,所选择的外控点是道路标线的折点,并在无人机航飞前将外控点处布置标靶,提高参照清晰度。合理检定外业控制点联测仪器,起算点设置在已有的测区控制点,借助CORS 原理进行差分解算。由于在核实区域存在少部分网络信号接受能力弱的点位,需要引入快速静态定位测量方法,依据CJJ/T 73—2019《卫星定位城市测量技术标准》。
无人机起飞前要勘察航线覆盖区域是否受到机场、障碍物、强磁性建筑体的影响,在排除影响后,适当外扩测区的线路规划范围,依据测量范围内的最高建筑体确定飞行和返航高度,要求航行高度超出最高位置,并在测区中心位置安置起降点。航行前要确定天气情况,需要在10:00~15:00 的晴朗无云天气开展航测工作,并保证预定航高与实际航高间的差值不得超出5%,最大与最小航高间的差值不超过30 m,每条航线间不允许存在绝对漏洞和相对漏洞,航向重叠度、旁向重叠度不得低于80%。
配合应用全站仪,处理数据。全站仪于控制点上设站采集的地物点与地形点,或采用网络RTK 采集明显地物与地形点,在内业对影像平面与高程质量进行比较分析,外业数据采集时要求种类包含全面、具有典型意义,点位分布均匀、兼顾明显与隐蔽,采样比例适中、能够反应特征[3]。
3.2 规划核实应用要点
作业中,已按照地物点的分类和技术设计中地形、地物要素的采集、表示与细部测量技术要求以及相关规范要求,布设量测像控点,通过大疆精灵4RTK 无人机获取的航空摄影数字像片,在ContextCapture Center 数字摄影测量系统上采用光束法区域网空三加密对外业像控成果进行加密,建立测区地形仿真三维模型,通过全站仪、RTK 实地采样地物、地形点验证三维模型的平面和高程精度,在满足精度要求条件下,再通过清华山维EPS3DSurvey 三维测图软件,以ContextCapture Center 软件生成的三维模型为基础,通过裸眼采编技术制作1∶500 数字线划地形图。最终提供符合要求的地形图[4]。
航向重叠度80%,旁向重叠度80%,旋偏角低于25°,倾斜角小于3°,航线弯曲度小于3°。总飞行架次为4,地面分辨率0.02 m,摄区面积0.31,相对航摄高度为100 m,像控点9 个,点号命名为L01,L02,…,L09。在重叠度满足范围线内业生产要求的前提下,本次作业在航线规划时外扩距离为100 m,保证了范围最边缘区域的完整性以及后期建模不会出现因照片重叠度不够而导致的模型重建时出现房子、植被等地物破碎等质量问题。
3.2.1 外业数据获取
大疆精灵4 RTK 相机采用内置相机,相机有效像素2 000万,最大分辨率为5 472×3 078(16∶9)、4 864×3 648(3∶2),相机焦距为35 mm,相对高度100 m,分辨率为2.74 cm/pix,满足项目地面分辨率优于5 cm 的要求。ContextCapture Master 自动建模系统中自动完成空三计算,采用光束法区域网整体平差方法进行[5]。完成空三解算,选取坐标系,导入相应的像控点,并完成刺点。
3.2.2 内业数据获取
居民地、工矿建筑、道路设施、管线设施、水系设施、水稻田等地形地貌测绘采用自动化建模软件和EPS 三维测图软件的三维测图模块,以ContextCapture Master 软件生成的三维模型为基础,通过裸眼采编技术生成满足1∶500 数字线划图规范要求的地形图。本测区采用EPS2019 地理信息工作站进行图形编辑,内业编辑过程中注意了业务技术的统一,图层、线型、代码、字体、字高、字宽、均按GB/T 20257.1—2017《国家基本比例尺地图图式 第1 部分:1∶500 1∶1000 1∶2000 地形图图式》的要求执行。
3.2.3 规划核实内容
1)核实用地:本项目为出让地,其用地以土地出让时的“出让用地红线”为准,故在详图中以“审批出让红线”落图,并结合项目建设情况,分析形成的实景模型是否存在“超越用地红线”现象。在实景三维模型中加载用地红线,采集模型中建筑物的条件点坐标,比对成果坐标和模型所采集的坐标,判定条件点是否正确[6]。
2)计容建筑面积分层图绘制与面积测算:建设用地面积以管理部门正式批准用地范围的面积为准,计算出本项目的建筑基底面积、计容建筑面积。规划计容计算建筑面积执行的是国家标准GB/T 50353—2013 《建筑工程建筑面积计算规范》。房产测绘中计算房屋面积是依据国家标准GB/T 17986.1—2000《房产测量规范 第1 单元:房产测量规定》。执行标准不同,两套规范对面积计算的具体规定存在不一致的地方,导致计算结果也会不一致。参照表1 要求对比实景模型确定是否满足要求。为了保证建设工程能够按照规划许可进行建设,在竣工之后对本工程进行规划计容面积核实测量和房产面积测绘。
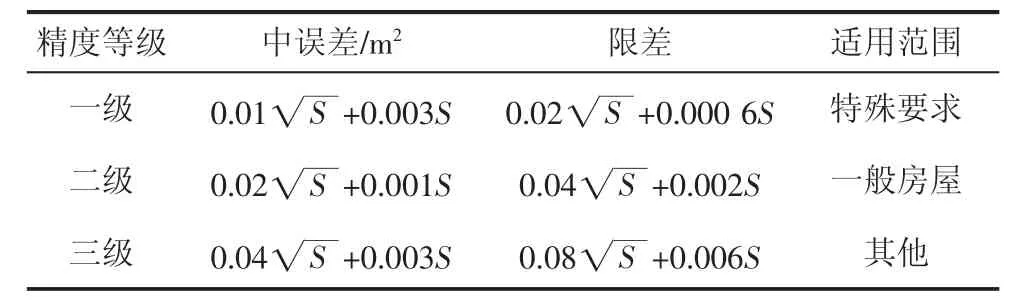
表1 面积测算精度要求
3)建筑物四至距离及相对关系要素:量测三维模型上四至距离和相对关系,利用软件自带量图功能,对比设计数据和量测数据,判定是否准确。
4)建筑物面积、尺寸和高度要素:量测三维模型上建筑物的长宽高,结合量测数据求出对应的面积,将底层面积、尺寸和高度与规划数据比对,判定是否准确[7]。
3.3 数据验证及分析
3.3.1 坐标精度
整理规划核实项目中的坐标数据,统计检测点和外业实测点,形成表2 所示统计表。
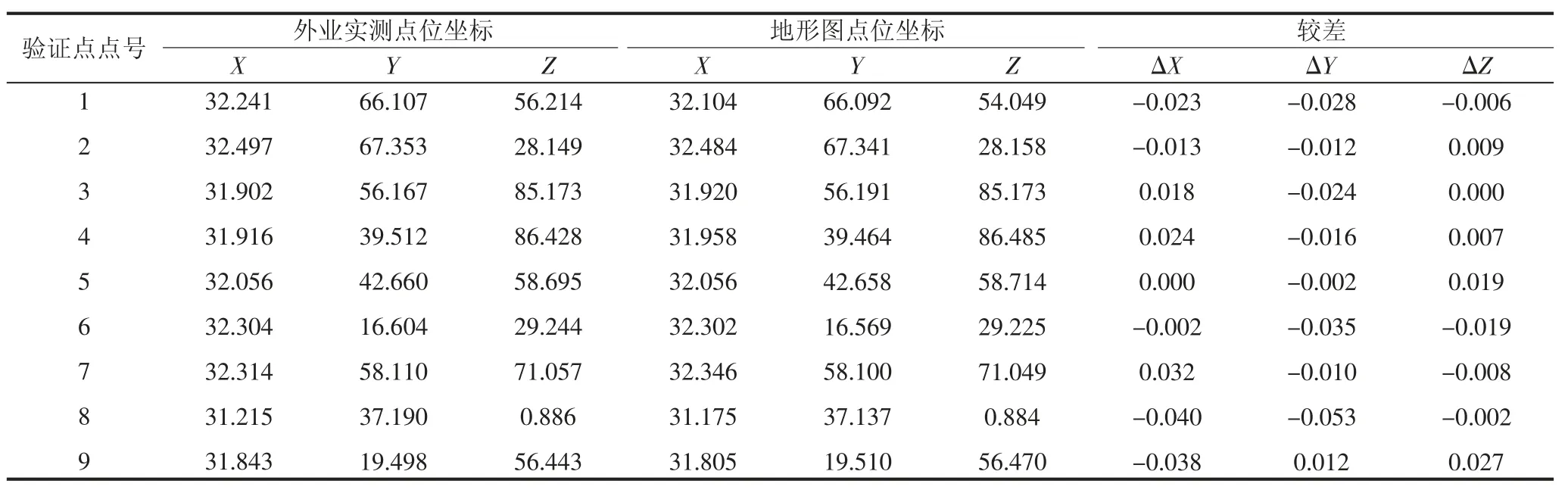
表2 精度统计表
结合式(1)和式(2)计算各测量点的坐标较差,形成误差统计图。通过分析统计图,发现坐标较差最大为20 cm,且主要分布在1~10 cm,说明坐标精度满足规划需求。
式中,ΔX 为坐标较差;n 为检测点总数;m 为成果中误差;ΔX为X 方向的较差;ΔY 为Y 方向的较差。
3.3.2 边长精度
整理9 个布控点位上的边长要素数据,采集规划核实项目实景三维模型中的建筑边长、四至距离和高度,统计边长具体数值,对比实地量测和模型采集数据,作差后取绝对值形成差值分布图。按照差值0~1 cm、1~5 cm、5~10 cm、10~15 cm、15 cm 分别统计边长数量,经统计,以上差值范围下的边长数量分别为9、80、21、4、2,求出的平均值为4.2 cm。可以看出,实测边长与模型采集边长的差值平均为4.2 cm,说明核实城市建设规划中的外围长度要素可应用无人机倾斜摄影测量技术。
4 结语
综上所述,基于无人机倾斜摄影的城市建设规划核实方法能够应用于实际工程中,所形成的实景三维模型可真实反映核实区域的建筑特点。经验证,案例规划项目中,核实坐标精度可基本控制在1~10 cm,边长精度基本控制在4.2 cm 左右,符合规划核实测量技术要求。后续研究中要从检测机器人联用等智能化角度予以着手,以此贴合当前技术智能化发展方向。
