
三维激光扫描技术在科技园区厂房改造中的应用
2023-12-21 12:18:02许景达贾长庆杨勇
工程建设与设计 2023年23期
许景达,贾长庆,杨勇
(中建二局第一建筑工程有限公司,北京 100000)
1 引言
在科技园区发展的背景下,旧厂房的改造需求逐渐增加。传统的厂房改造中采用的手工测量方式存在着一系列问题[1-2]。首先,手工测量需要耗费大量的时间和人力资源,对于大型复杂的厂房来说尤为明显。其次,由于人为因素和测量设备的限制,手工测量容易出现测量误差,造成改造方案的精确度不高。此外,传统方式无法实现对厂房内部细节的全面掌握,限制了改造设计和规划的深度[3]。因此,迫切需要一种高效、准确的测量方法来获取厂房现状数据。
三维激光扫描技术又被称为“实景复制技术”,在应用时一般是通过发射、接收激光束来设定扫描物体的定向三维坐标,以此完成基础数据的采集[4]。将该项技术与科技园区厂房改造工作进行融合,可进一步扩大实际的建设施工范围,形成一个更加安全、稳定的建设施工环境。在复杂的工程背景下,通过三维技术的扫描进行数据、信息的连续性采集,可建立完整、定向的科技园改造模型,以帮助施工人员进一步了解新建筑和既有建筑的占比,制订更加贴合实际的改造方案,为后续关联建设工作的执行提供参考依据[5]。
2 科技园区厂房改造中三维激光扫描技术的应用
2.1 获取厂房改造点云数据
进行科技园厂房的改造和建设时,要先根据实际施工需求获取厂房改造的初始数据[6]。首先,明确厂房的具体位置,并对需要改造处理区域进行标记,为后续改造提供基础。接下来,应使用三维激光扫描仪获取厂房的剖面、立面和平面图等信息[7]。在对相关信息进行采集后,还需要应用点云处理技术,对采集的数据进行分类筛选。为保证其数据传输的安全性,建立传输、接收数据的测定基站,并保证相邻两个测站之间有15%~25%的重叠,以避免数据存在漏采集。厂房基础可控改造数据设置如表1 所示。
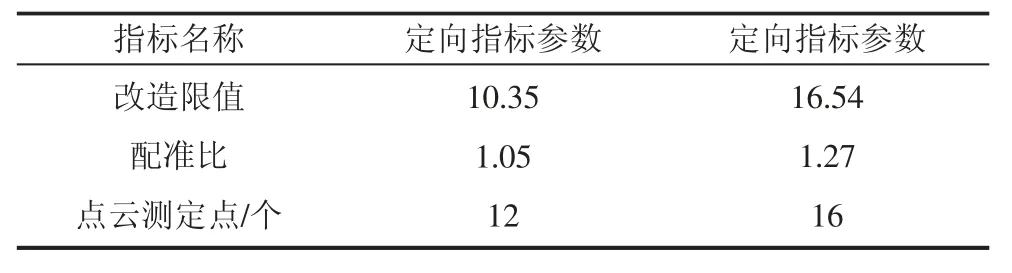
表1 基础可控改造数据设置表
根据表1 完成对基础可控改造数据的设置。综合实际建设改造要求,对部分动态化数据进行调整,以确保数据信息的真实性与合理性,为后续改造工作的进行奠定数据基础。
2.2 标定多层级三维坐标
完成数据采集后,对标记的科技园厂房需要改造的位置进行基础三维坐标标定。先计算使用三维扫描仪的可控相位差,其表达式如式(1)所示:
式中,J 为可控相位差;L 为光程差,m;λ 为波长,m。
以此为基础,将仪器自身定义为坐标原点,设置反射棱镜为水平,调整三维激光的脉冲差,测定出改造前与改造后内置结构的间距。
接下来,使用激光扫描装置和定向的控制单元得到更加稳定的测量对象坐标,具体如图1 所示。
根据图1 完成对三维基础坐标的设定,接下来,获取对应的坐标数值以及信息,以待后续使用。
2.3 建立三维激光扫描改造模型
完成基础三维坐标的设定之后,进行科技园厂房改造模型的构建。在厂房建筑的立面调整建设过程中,需要先利用三维激光扫描技术对整个平面进行定位扫描,绘制出虚拟的三维可控优化模型。通过在模型中标记点位,并将点位相互关联,可形成一个等距离缩放的真实厂房构造模型,其流程如图2 所示。
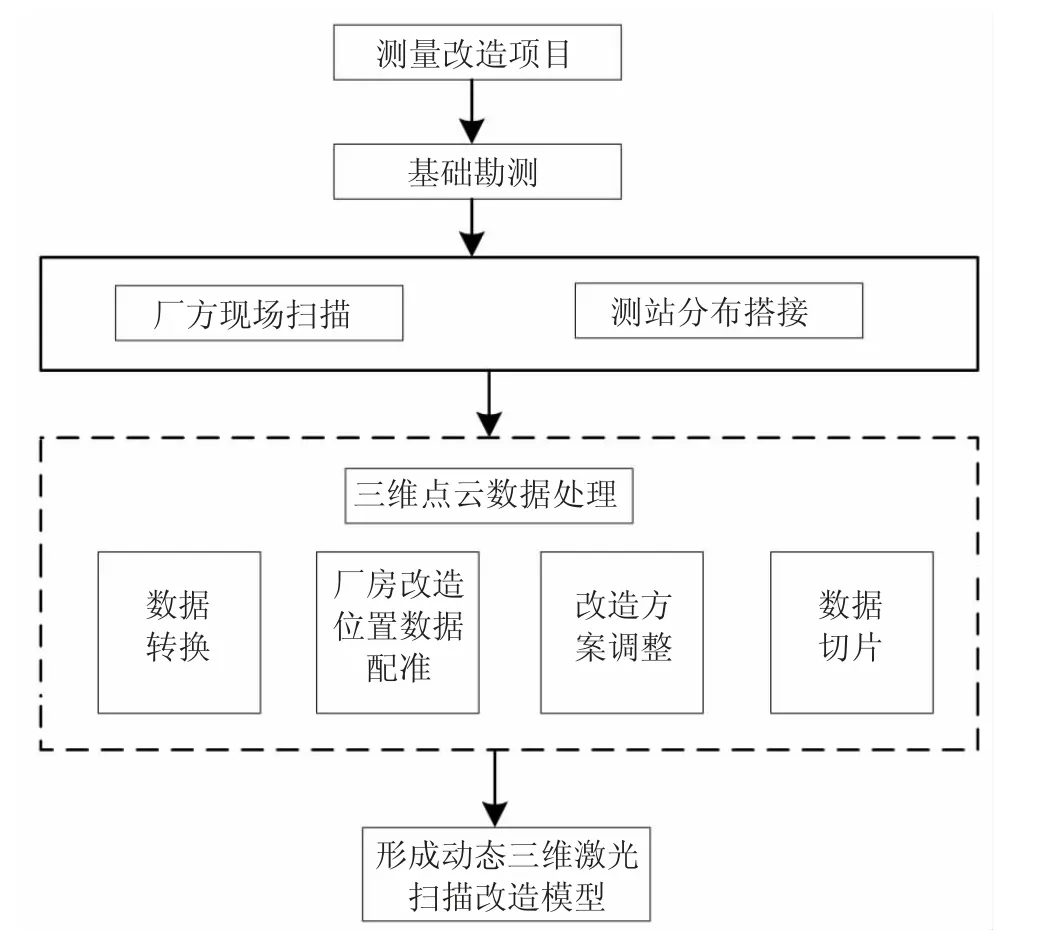
图2 三维激光扫描改造模型构建流程图
2.4 可视化局域调整实现科技原厂房改造
可视化局域调整是针对三维激光扫描改造所建立的厂房模型而言的。由于不同的建设标准和要求,厂房结构可能需要进行调整或修改。在这种情况下,可利用三维激光扫描技术中的可视化技术改变节点的具体位置,打破传统的二维线条模式。通过将三维激光扫描转换为厂房内置结构的建设空间,结合虚拟现实技术,如VR 和3D PRINTER,可进一步加强可视化局域调整的效果。采用该种方法,能够降低科技园区厂房改造的误差,提高改造项目的工程进度,并确保施工效率的提升。
3 实例分析
选定D 科技园内部的厂房改造项目作为测试的主要目标对象,采用对比的方式展开分析。利用专业的设备采集D 科技园内部厂房的基础数据,汇总整合之后,根据实际厂房建设需求及标准的变化,对最终测算得出的改造结果比照研究。
3.1 D科技园厂房改造概况及基础设置
综合D 科技园内部的厂房改造项目的厂房设计为复合式,厂房之间具有较强的关联性,并且是临街改造项目。在建设过程中,要求辅助立面的精度在合理范围内,一般平面的精度必须优于5.5 cm。为了满足这个要求,采用了Z+F IMAGER 501型号的三维激光扫描仪和定向识别装置。这些设备能够提供高精度的数据和准确的测量结果。通过使用这些设备,可以对厂房进行全面的三维扫描,获取详细的建筑结构数据。
在对D 科技园厂房进行改造前,首先需要对其内部结构进行扫描,以采集初始数据和信息。完成基础性的测定后,可使用Trimble RealWorks 模拟测定软件进行数据筛选和整合。为更好地进行改造工作,可将D 科技园内部厂房需要改造的区域划分为5 部分,并针对每个区域结合三维激光扫描技术进行相应的处理。在每个区域中,可以通过设置节点来采集初始数据和标准,并根据需要进行三维激光扫描指标数值的设置,其具体设置如表2 所示。
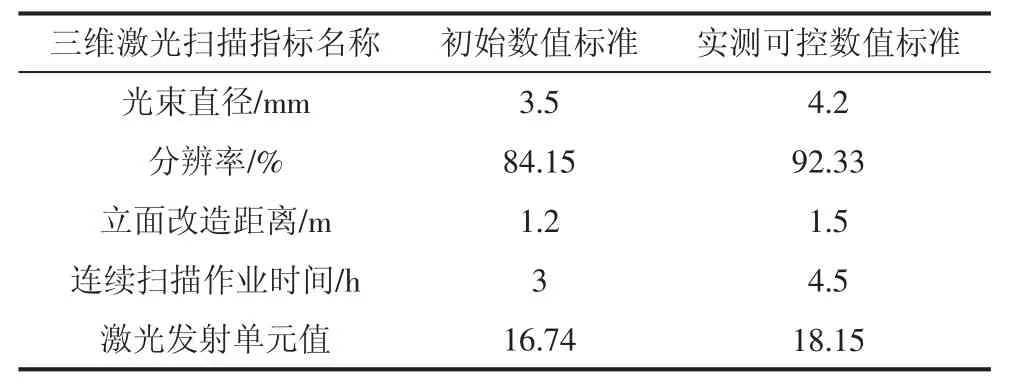
表2 三维激光扫描指标数值设置表
随即,以此为基础,将各个区域设置的监测节点进行搭接关联,完成基础测试环境的搭建。接下来,综合三维激光扫描技术,进行具体测试分析。
3.2 D科技园厂房改造实证分析
根据对D 科技园厂房改造项目工程概况的分析和基础测定环境的设置,可以综合三维激光扫描技术进行具体的测验。首先,使用三维激光扫描技术对科技园厂房的内部结构和点位进行标定,形成一个模糊的虚拟框架。然后,利用主控平台和Scene 软件对采集到的点云数据进行预处理,以备后续使用。接着,基于上述虚拟框架,标定出5 个区域的核心改造点,并分析内部结构的可改造处理空间,形成一个三维激光扫描改造模型。利用Trimble RealWorks 软件结合三维激光扫描技术,对需要改造的位置进行点云切片模型构建。通过折线绘制方式,确定改造的具体结构区间,并输出CAD 实体,进行二次标注。最后根据扫描得到的数据和信息,进行三维修改处理,并将处理好的改造结构导入CAD 软件中,作为改造建筑结构的参考。
通过上述模式对D 科技园内部的厂房进行改造处理,测算出改造的点云测定误差,如式(2)所示:
式中,H 为点云测定误差,mm;n 为点云中点的数量;xi,yi,zi为每个点的坐标值;x,y,z 为平均坐标值。
根据上述测定,完成对测试结果的分析,如图3 所示。

图3 测试结果对比分析图示
根据图3 完成对测试结果的分析:经过5 个区域的测定分析,综合三维激光扫描技术,最终测算得出的点云测定误差被较好地控制在了0.3 mm 以下,说明该种方法在厂房改造中的针对性较强,误差可控,具有实际的应用价值。
4 结语
总而言之,与初始的建设辅助技术相比对,三维激光扫描技术相对更加灵活、多变,具有更强的针对性,在复杂的建筑环境下,有着高精度、高效率等诸多优势,能够帮助施工人员快速测算出各项指标参数,逐渐形成更为完整的施工环节。与此同时,三维激光扫描技术的应用,还可在最大程度上获得科技园厂房表面的三维数据,科学使用,可一定程度上提高科技园厂房改造的效率。
