
黄尾河水文站侧扫雷达在线流量比测率定分析
2023-12-19 03:28徐立
陕西水利 2023年12期
徐 立
(安徽省六安水文水资源局,安徽 六安 237200)
0 引言
随着中小河流水文监测系统的实施,水文监测站网密度和功能已基本趋于合理,水文监测工作任务会越来越重,但应用传统的转子式流速仪或浮标法施测断面流量尤其是高洪流量存在诸多不便,难以满足水文应急监测工作的开展和流量自动化遥测的发展。本文以山溪性河流代表站黄尾河水文站利用雷达波流速仪非接触方式施测水面流速,并与测验精度较高的转子式流速仪对比测验,通过对比分析,建立满足水文技术规范要求的相关关系,以此解决中高洪测流,应急监测和中小河流水文测站尤其是山溪性河流测站的测流困难问题。
1 测站基本情况
黄尾河站位于安徽省安庆市岳西县黄尾镇黄尾村,大别山区200 km2~500 km2区域代表站,为磨子潭水库的入库控制站,测站流域面积270 km2,1957 年5 月份建站,黄尾河站历史最高水位为230.97 m,最大流量2740 m3/s,为二类精度站。本站测验河段为砂卵石、块石河床,顺直长度约达500 m,断面宽89.5 m。本站为磨子潭水库入库控制站,山区性河流,水情变化受降雨影响,暴涨暴落,基本断面上游500 m 处有纱帽水电站1 座,2000 m 处有严家电站1 座。测验河段在200 m 范围内较为顺直,下游250 m 处有一弯道,在高水时起控制作用。右岸沿河筑坝,左岸为自然土坡,筑坝对中高水测验起控制作用。水位变化受小水电发电及泄洪影响显著,中高水水位流量关系呈单一线。河道及断面目前均比较稳定。水位级划分:Z ≥225.40 m 为高水,225.40 m>Z ≥224.50 m 为中水,Z<224.50 m 为低水。
2 侧扫雷达测流系统概况
2.1 测流基本原理
侧扫雷达测流系统软件利用流速面积法进行断面流量的计算,依据布拉格散射和多普勒效应原理得到各距离段表面流速分布,加上已知的河流横截面及根据测站自记水位计查得相应水位,从而算出河流流量。侧扫雷达测流系统的默认水面系数设置为“1”。采用《河流流量测验规范》均匀浮标法的流量计算方法,把实测表面流速当做浮标流速,逐条测段累加:部分平均流速、部分面积、部分流量。断面流量的计算方法与流速仪法测流计算方法相同。具体计算公式如下:
式中:Q 为雷达流量;vi为部分流速;si为分段面积。
布拉格散射理论见图1。当雷达电磁波与波长为其一半的水波相互作用时,同一波列在不同位置的后向回波相位差异达到2 或2 的积分倍数,从而导致布拉格后向散射增强。
当河道水波具有相速度与水平速度时,就产生了多普勒效应。在一定的时间范围内,无数随机正弦波的叠加可以近似地考虑实际波形。这些正弦波中必定包含两列正弦波,其波长恰好等于雷达工作波长的一半,朝向或远离雷达波束的方向。当雷达发出的电磁波与这两种波相互作用时,就会产生增强的后向散射。移向雷达波的波产生正多普勒效应,而远离雷达波的波产生负多普勒效应。多普勒效应的大小由波动的相速度Vp决定。由于重力的影响,一定波长的波浪的相速度是不变的。在较深水中,当深度大于波长 L 的一半时,波相速度Vp满足以下定义:
由波相速度Vp产生的多普勒效应为:
式中:f0为雷达的频率,MHz;fB为多普勒效应频率,Hz。
这种频率偏移称为布拉格频移。向雷达波移动的波将有一个正频移(正布拉格峰值位置) ,而远离雷达波的波将有一个负频移(负布拉格峰值位置)。在没有表面流的情况下,布拉格峰的位置正好与方程(2)描述的频率一致。当水面上有表层水流时,一阶散射回波的速度 Vs是河流的径向速度Vcr加上无河流时波相的速度 Vp,即:
此时,一阶雷达回波的振幅是恒定的,而雷达回波的频移是恒定的:
单站超高频雷达可以获得地表径向速度。利用一定距离的双站高频雷达获得各站的径向速度后,通过矢量投影和综合得到各站的矢量速度。双基地径向流与矢量流组合的原理见图2。
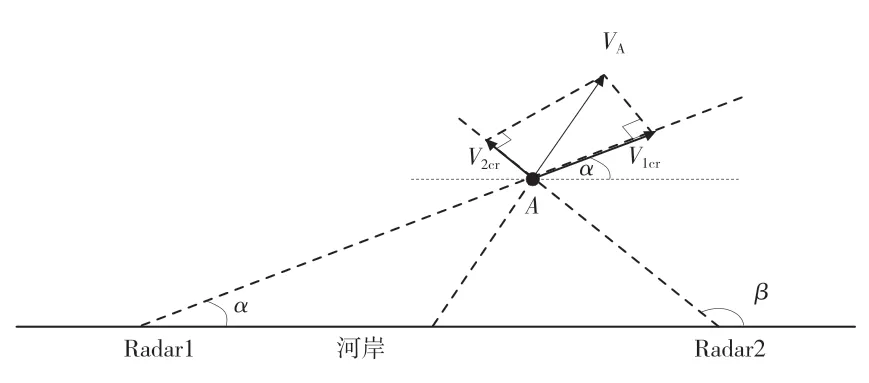
图2 双站雷达组合得到矢量流示意图
2.2 侧扫雷达测流系统介绍
侧扫雷达测流系统一种工作中心频率为340 MHz 的相干脉冲多普勒雷达,采用线性调频中断连续波机制。可以测量30 m~400 m 宽的河流,雷达的实际探测范围也与雷达天线的位置、外界噪声水平的位置、河流的粗糙度有关。雷达的距离分辨率分别为5 m、10 m、15 m 等。对于等宽度的直道,河流的流向与河岸平行。河道是顺直的,见图3。雷达测得的A 点径向速度为VAcr,由于河流的流向与岸线平行,A 点河流的速度为 VA=VAcr/cosβ。如果雷达测得 B 点的径向流速为VBcr,则B 点的河流流速为VB=VBcr/cosα。如果 A 点和 B 点到河岸的垂直距离相同,那么理论上VA=VB。
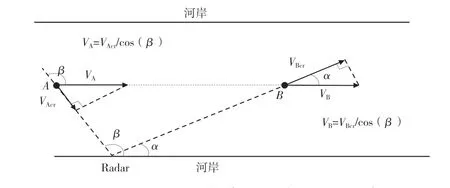
图3 单一侧扫雷达获取河道水流速示意图
侧扫雷达测流系统按照不同的河流条件和用户需求配置为单雷达测流系统和双雷达测流系统。单站系统可用于同宽度直线河流的水流检测。在河道宽度不等、河道非直等复杂流场情况下,应采用双站雷达测流系统实现流量测验。一个完整的流速流量和流量测验系统由至少一个野外站和一个中心站组成。本系统全天24 小时不停施测,大约每10 min 上传一次流量数据。在施测时,采用非接触式雷达技术,雷达天线向外侧施放扇形雷达波到达水面并测量回波数据,实现对河流表面流场、网格点流速进行“多点同时”连续监测,并提供网络在线数据服务,通过对河道水位、大断面面积、河流表层流速等数据交互,完成流量数据在线合成。
3 数据资料整理及分析
3.1 分析方法
依照同一水位,人工实测的流量为横坐标,侧扫雷达的流量为纵坐标绘制出实测流量与在测扫雷达线流量关系点分布于45°线情况,对偏离45°线较远侧扫雷达流量进行修正再与人工实测流量进行分析,最终得到侧扫雷达流量修正公式。
3.2 相关数据分析
2020 年7 月18 日至2022 年9 月1 日共比测流量33 次,为同水位同时间比测。人工实测流量与侧扫雷达在线流量进行相关点图,相关关系见图4。

图4 黄尾河站在侧扫雷达线流量与人工实测流量线性相关图
从图4 可以看出:当侧扫雷达在线流量Q自≤56.4 m3/s时,在线流量测点分布在实测流量线左右上,说明在线流量与实测流量关系较好;当56.4<Q自≤400.00 m3/s 范围内时,在线流量基本位于实测流量线上方,说明在线流量系统偏大;当Q自>400 m3/s 时,在线流量部分位于实测流量线上方,说明在线流量系统偏大,部分位于实测流量线下方,说明在线流量系统偏小,且随着流量变大,误差逐渐变大。采用分段拟合的方法对在线流量进行修正,建立修正流量与实测流量关系线之间的相关关系,在线流量修正值得计算公式如下:
在线流量修正值见表1。实测流量关系线与修正在线流量值相关关系见图5。从图5 和表1 可看出,人工流量与修正在线流量值基本均匀分布于实测流量关系线的两侧,且相对误差普遍较小,说明修正后在线流量精度较高。

表1 人工流量与修正后侧扫雷达流量误差分析

图5 黄尾河站在线流量修正值与人工实测流量线相关图
3.3 关系线检验
33 次人工流量与侧扫雷达修正流量通过了三项检验,经过三项检验计算,随机不确定度为8.6%小于10%,系统误差为-0.6%小于1%,满足定线规范要求,检验结果见表2。

表2 人工流量与修正后侧扫雷达流量关系线三项检验成果
4 结论
(1)侧扫雷达实测流量与人工流量之间呈线性关系,检验结果合理,符合《河道流量测验规范》等相关规范的要求。
(2)黄尾河河站采用侧扫雷达在线测流系统施测时,流量成果按下式计算:Q自修正=Q自×1.0000(Q自≤56.4 m3/s),Q自修正=Q自×0.5077+23.8874(56.4 m3/s<Q自≤400.00 m3/s),Q自修正=Q自×1.4651-355.1764(Q自>400 m3/s)。
猜你喜欢
黑龙江水利科技(2022年4期)2022-05-25
Journal of Palaeogeography(2022年1期)2022-03-25
石河子科技(2022年4期)2022-03-24
快乐语文(2021年35期)2022-01-18
法律方法(2019年4期)2019-11-16
趣味(语文)(2018年7期)2018-06-26
山东水利(2018年6期)2018-03-24
摄影之友(影像视觉)(2017年1期)2017-07-18
考试周刊(2016年88期)2016-11-24
水利科技与经济(2016年8期)2016-04-22
