基于DP-Modeler的实景三维校园精细化模型构建★
2023-12-16 02:53:34郭昕怡陈毓洁胡泽坤
山西建筑 2023年24期
郭昕怡,刘 军,陈毓洁,胡泽坤
(防灾科技学院生态环境学院,河北 三河 065201)
1 概述
数字城市创建中,建筑物的三维建模占据了至关重要的地位。现实中出现过的建模方式不一而足,但经过实践的重重检验,最终留下了以下几种传统建模方法:首先,以相框为基础的建模方法,如使用AutoCAD,SketchUp等软件建模;其次,以地图为基础的三维模型,通过将矢量范围叠加到地图上,对纹理图像加以处理,以生成三维模型,如使用ESRI的CityEngine等工具。这些传统建模方法确实在不同历史时期起过实质性作用,但随着建模技术的不断成熟,这些传统建模方法的弊端也逐渐显现,其步骤繁杂、投入资源多且难以保障建模精度[1]。一些研究人员已经提出了新的方法来改进三维建模过程。如彭磊等创造性地在Trimble RealWorks中导入云数据,经过数据配准、点云降噪、模型创建等一系列处理,生成了更高效、更规范的三维模型[2];周平华等基于机载LiDAR点云重新构建建筑物三维模型。虽然LiDAR技术能提升建模精度,但因设备价格居高不下,且建模算法未完全成熟,因此这种三维模型目前并未得到广泛应用[3]。刘建程等以复合翼无人机倾斜摄影测量为基础构建实景三维模型。不可否认,实景建模确实具备高精度、高效率、高还原度三大优势。但在建模过程中存在软件无法处理特殊结构建筑,需人工解决,仍需进一步完善[4]。
DP-Modeler软件是专门用于倾斜摄影三维建模的工具,它允许通过组合多个影像,准确且快速地生成三维模型。这款软件兼容多种影像数据,同时也提供了多元化的建模工具和观察视图,以协助用户构建尺寸精准、位置精确的三维模型。通过集成多种数据成果,DP-Modeler能够提供高度可视化的环境,为用户提供丰富多样的建模选择。它的交互性极佳,用户界面简单友好。不仅可以节约时间和资源,还能有效降低三维建模的成本。在建筑设计、土地规划、文化遗产保护或城市规划等领域,都发挥着重要的作用。
本文以防灾科技学院北校区为研究对象,采用多旋翼无人机(Unmanned Aerial Vehicle,UAV)倾斜摄影测量手段,快速且有效地获取了多视影像数据,且提升了影视数据的分辨率,扩大了影视数据的来源范围。基于Context Capture软件构建三维实景模型,通过DP-Modeler软件,进行单体化精细建模,快速重建了校园三维精细模型。
2 无人机倾斜摄影三维建模流程
无人机倾斜摄影三维建模主要有以下关键步骤:一是采集外业数据;二是处理内业数据。在外业数据采集过程中,通过倾斜摄影测量技术,执行了校园北校区航飞计划,以获取北校区的航空影像。在内部数据处理阶段,我们首先借助Context Capture软件自动三维重建功能,构建初始化OSGB格式粗模型。并利用DP-Modeler软件精细化处理数据。通过单体化建模技术,逐个识别和重构各个场景中的物体。同时,使用纹理映射技术,将真实的纹理信息应用到模型上,使其呈现出逼真的外观和质感。最终,构建出实景三维精细化模型。
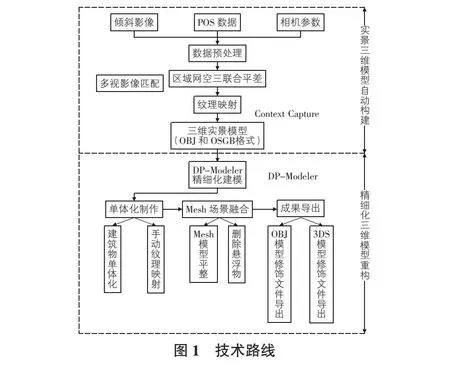
2.1 技术流程
本文研究的建模方法技术流程如图1所示。
2.2 倾斜摄影测量数据获取
本项目采用大疆Phantom4 RTK无人机执飞,这是一款小型多旋翼高精度航测无人机,专为低空摄影测量应用而设计。它具备了厘米级精度的导航定位系统和高性能成像系统,便携易用,可以显著提高航测工作的效率。在进行实地数据采集之前,我们需要设计飞行方案。本次飞行任务选用DJI GO APP进行航线设计,采用5向飞行方案,并利用千寻知寸FindCM网络RTK提供的厘米级定位服务,以确保航摄操作的精确性。考虑到测区的地势平坦,我们设定了飞行高度为120 m,航向重叠率为80%,旁向重叠率为75%,飞行速度为9.8 m/s,相机的快门速度设置为1/1 000 s,拍摄模式为等距间隔拍摄。选择无风晴朗天气进行外业航飞,最终共获取了1 184张影像数据。无人机及遥控器见图2。

与无人机配套的是DJI-FC6310R相机,该相机参数如下:焦距为8.8 mm,像素为5 472×3 648,传感器尺寸13.2 mm×8.8 mm,像元尺寸2.41 um,表1列出了无人机飞行器和相机主要参数。根据公式(1):
(1)
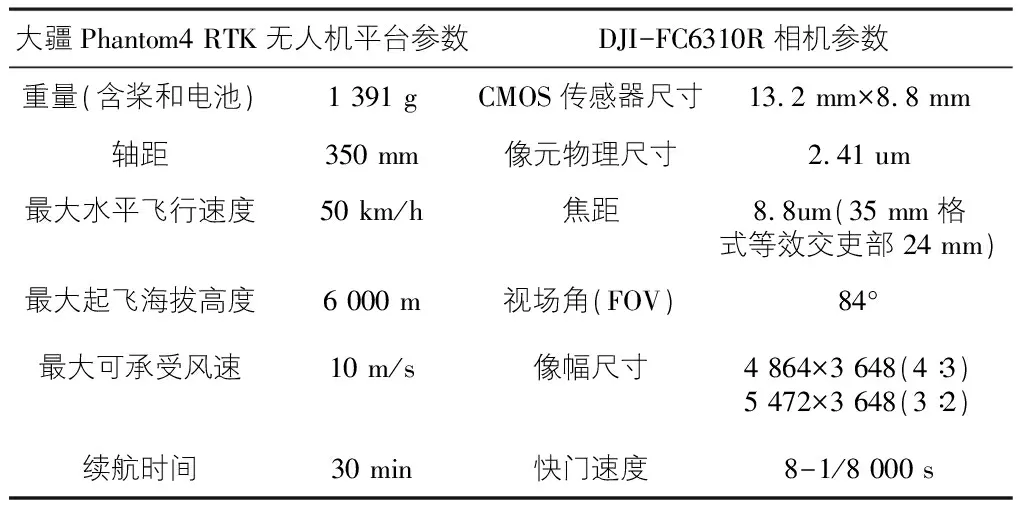
表1 无人飞行器及相机的主要技术参数
其中,f为镜头焦距;a为像元尺寸;d为地面分辨率;计算出航高为120 m,地面分辨率为3.29 cm/pix。
2.3 校园三维场景自动化建模
实景三维建模的核心技术步骤如下:预处理数据、倾斜影像区域网联合平差、点云密集匹配、构建不规则三角网、纹理映射、构建三维模型[5]。
2.3.1 预处理
利用Context Capture软件进行倾斜数据处理时,需要准备的数据包括原始影像、POS数据、相机参数(焦距、像素大小等)。在三维建模前,需要对以上数据进行检查,首先,检查影像数据的覆盖情况,确保其重叠度达到要求,排除云层遮挡的情况。并对原始影像进行照片重命名,以便更好地管理数据。同时,要确保POS数据、影像数据的相互对应,确保数据无缺失、无冗余,确保相机参数的完整性和准确性[6]。
2.3.2 空中三角测量
倾斜摄影测量数据建模的核心步骤是空中三角测量。使用高分辨率的多角度航拍图像,结合Context Capture软件和共线条件方程的理论,选取多视角区域网法进行空中三角测量,不仅可以保障信息数据的隐蔽性和安全性,还可以准确计算在物理空间中目标点的坐标,进而确定影像的方位元素[7]。
2.3.3 三维模型自动生成
通过从多视图影像中提取同名点坐标,能够生成高密度、高精度的三维点云数据。点云数据被用于构建不规则三角网(TIN)。通过分析三角形平面在TIN网中所处的空间位置,可以确定视点图像的最佳纹理。借助自动纹理映射技术在三维模型中导入这些纹理,构建完整化的三维场景[8],如图3所示。在这个过程中,需确保倾斜影像贴图结果的色调、分辨率和原始色调、原始分辨率并无二致,也要确保纹理不会出现变形,同时要确保纹理和模型的高度适配。利用Context Capture软件生成OSGB和OBJ格式的三维模型,为在DP-Modeler软件下精细化修饰三维模型准备数据。

2.4 三维模型精细化构建
尽管Context Capture在重建三维场景方面起着不可替代的重要作用。但基于Context Capture的模型数据存在一些缺陷:1)生成的三维场景呈整体形式,难以对单个建筑物进行属性赋值、入库等单体化操作,从而给后续的部署和管理带来了一定限制;2)三维模型包含大量数据,在加载和预览三维场景时可能产生许多不便;3)三维模型精度相对较低,部分模型表面模糊不清,甚至存在纹理缺失和大量悬浮物等问题。由于照片是在空中拍摄的,建筑密集区和屋檐下的植被可能导致信息缺失。为了获得更为清晰、更具广泛应用性的实景三维模型,有必要进行精细化的三维模型构建,通过模型修饰和单体化等操作来优化模型效果[6]。
2.4.1 单体模型构建
单体化建模分为三种类型:切割单体化、ID单体化和模型重建单体化,而DP-Modeler属于模型重建单体化的一种方法。对于那些建模效果不佳的重要建筑物,DP-Modeler通过重新绘制已有模型来改善建筑物的外观和细节,同时对其表面进行纹理映射,使其更接近实际建筑物的外观。为了确保建筑物的准确性,DP-Modeler利用高程信息,通过地形和地理数据对建筑物进行拉伸,以创建建筑物的基本模型。然后,根据模型坐标信息和倾斜摄影图像进行的空三解算,选择最适合的纹理映射到建筑物的表面,来提高建筑物模型的质量和准确性。
实际上,校园中的建筑物可将它们分为两大类:简单结构建筑和复杂结构建筑群。简单结构建筑包括单独的教学楼、宿舍楼、餐厅等,而复杂结构建筑群则由多个简单结构建筑组成,通常形成教学区或宿舍区等整体建筑群。可依据构件和功能差异,将单个模型细分为如楼体、阳台、楼梯、女儿墙、雨檐、栏杆、连廊等多个建筑构件。每个构件都有其独特的功能和特征。在创建这些模型时,可使用选择对象、绘制多线段、创建柱体、创建面、内偏移和外扩、复制、面切割等多种工具,以捕捉建筑物的轮廓线和各个构件的细节。整体建筑应该避免出现空洞表面和重叠表面,也不应该出现体积交叉,以确保建筑物在三维模型中呈现出准确且连贯的外观。
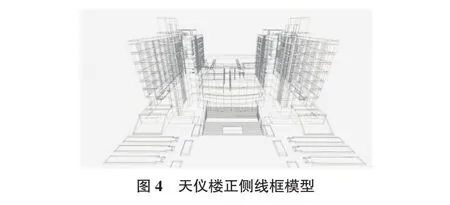
以防灾科技学院北校区的天仪楼为例,通过俯视图模式、透视图模式相互切换,勾勒模型轮廓,由于最终构建的模型以影像为准,并进行适当调整让其与影像吻合,图4,图5分别为天仪楼的正侧线框模型和后侧线框模型。

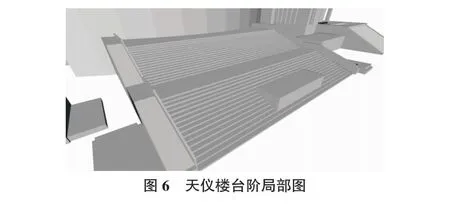
对于台阶等复杂的建筑部件的创建,需“创建多边形”后进行平分,再利用“挤出柱体”工具将楼底等高面设置为基准面,后选择“挤出到基准面”选项,单击楼顶轮廓面创建柱体,图6为天仪楼台阶局部图。
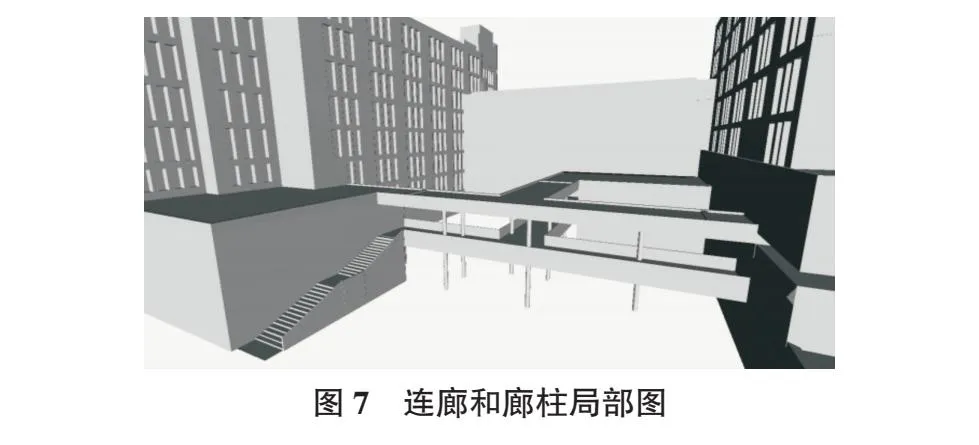
对于连廊、栏杆的制作,天仪楼二层的连廊下部有八根圆形廊柱支撑,需在地面上设置基准面,使用“挤出柱体”工具定位连廊的高度,创建多边形,并使用内偏移、外扩工具向内偏移出一个等距的多边形,再根据影像通过“挤出柱体”工具创建栏杆,完成连廊和栏杆建筑部件,图7为连廊和廊柱局部图。
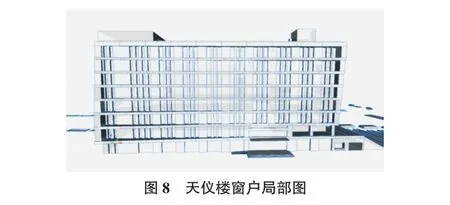
对于窗户的制作,使用面切割工具可切割出窗户的形状,根据mesh影像使用推拉工具将窗户向内推拉出一定厚度,做出建筑物的凹凸结构[9]。向内推拉的过程中,选择将出现的多余面删掉,图8为天仪楼窗户局部图。
构建完作业区范围内全部单体模型后,可通过“错面检查”,检测并删除面积为0的面。
2.4.2 纹理映射
纹理贴图时,选用自动纹理映射技术,将三维模型实体化,如图9所示。接着,通过手动纹理贴图技术精细化处理。以保证纹理贴图外观的清晰性、整洁性和自然性,以便于纹理能准确映射建筑物特征。

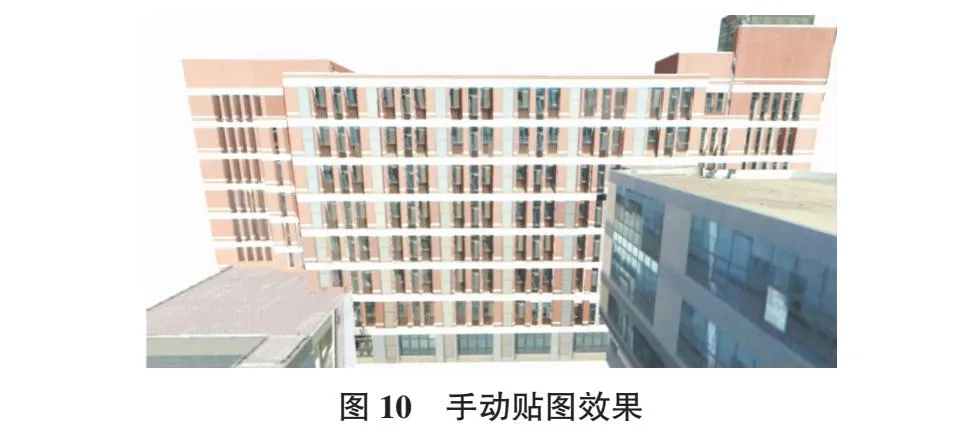
如果在某个矩形区域发现有部分被遮挡的情况,则需要手动贴图处理纹理,以提升模型的纹理质量,如图10所示。通常,会出现树木或其他建筑物等遮挡物体。可以通过切换至未受遮挡部分的影像来解决这个问题。这个过程允许手动编辑和替换受遮挡区域的纹理,以确保最终的纹理贴图达到最佳质量。这种方法有助于保证模型的外观在视觉上更加真实和自然。
若没有未被遮挡的可用影像,就需依赖Photoshop软件手动贴图,以进行交互式纹理编辑[10]。
2.4.3 单体化场景集成
在进行模型的单体化处理后,需要确保整个场景和单体建筑恰如其分地融合在一起,以保障建筑物和周边环境的统一性、和谐性。具体整合步骤如下:区域踏平、立体删除、批量重建。如图11所示,在区域踏平中需要标识并清除需要踏平的建筑部分,同时对地面拼接、贴图,让已删除部分的地面不至于显得突兀,确保已删除部分和未删除部分能不着痕迹地连接。接下来,在DP-Modeler软件中导入地面场景、单体建筑,进行有效整合。在DP-Modeler Mesh场景模式下,选中场景中悬浮树木、电线杆等多余物体,利用立体删除功能将其删除,如图12,图13所示。最终达成单体建筑与整个场景和谐融合的视觉效果,图14为单体与场景融合效果图。



3 结论
本文基于无人机倾斜摄影测量技术,结合Context Capture,DP-Modeler等软件,以及传统建模技术的优点,创建防灾科技学院北校区的实景三维模型。实验结果表明,在处理倾斜模型的独特组织结构和庞大数据量时,采用单体化处理方法具有多重优势。
首先,单体化处理能极大地减少整个三维模型所需的存储空间。其次,单体结构为后续应用提供了便捷的处理方式,使得在进行进一步的编辑、分析或应用时更加方便、清晰和美观,并确保模型的细节和质量得到保持与提升。
DP-Modeler的一键贴图映射技术在建筑物模型上的应用,通过将真实纹理与RGB渲染相结合,极大地提升了建筑物模型的视觉逼真度,并凸显了其细节特征,填补了Context Capture自动三维重建中可能存在的精度不足问题。这项技术有望在实景三维建模领域大放异彩,随着科技的不断进步,它的应用前景将不断扩展。它不仅可以为政府规划决策提供更加精准的基础数据,还有助于实现测绘成果与管线、交通等信息的无缝整合,推动数字化发展取得更为显著的成果。
此外,实景三维建模技术的广泛应用还可以推动数字化发展。通过将不同数据源整合到建筑物模型中,可以实现更全面的城市信息管理,提高城市基础设施的效率和可持续性。这有助于城市更好地适应不断变化的需求和挑战,推动城市数字化转型。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
软件(2020年3期)2020-04-20 01:45:18
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
中国军转民(2017年7期)2017-12-19 13:30:00
Coco薇(2017年8期)2017-08-03 15:23:38
北方音乐(2017年4期)2017-05-04 03:40:09
Coco薇(2015年5期)2016-03-29 23:22:15
大连工业大学学报(2015年4期)2015-12-11 04:06:50
中国卫生(2014年10期)2014-11-12 13:10:24