基于ZMP 下肢外骨骼机器人自平衡策略
2023-12-15 04:11王亮
传感器世界 2023年9期
王亮
重庆交通大学 机电与车辆工程学院,重庆 400074
0 引言
现在,中国社会老龄化趋势不断增加[1],偏瘫中风以及其他神经疾病、意外事故等造成运动功能障碍的人群数量不断增长,给他们的生活带来了极大的不便,也给社会增加了负担。因此,他们的运动功能康复是目前需要快速解决的一道难题[2]。下肢助力康复外骨骼机器人是一种新兴的、可穿戴式的智能穿戴设备,它能够很好地帮助老年人以及患有运动障碍的人进行康复训练,让他们慢慢恢复正常的行走[3],这为他们能够独立外出提供了很大的可能性。与发达国家相比,我国在下肢外骨骼机器人的研究方面起步要比他们晚很多[4],研究现状大致还处于初级阶段,但是目前也有很多公司在大力发展。现在国内许多机构高度重视对于下肢外骨骼的研究,尤其是对于康复与助行方面的研究。目前,发展相对较快、较好的下肢外骨骼机器人公司有上海傅利叶的Fourier X1[5-6],迈步科技的BEAR-A1,还有杭州程天的UGO 等。为了让患者进行更好的康复训练,本文设计了一款下肢康复外骨骼机器人,为达到稳定行走的要求,采用五次多项轨迹规划法,对髋关节以及踝关节进行轨迹分析。
1 ZMP 同步的自平衡控制策略
当前社会的研究热点就是下肢康复机器人的运动控制系统,很好地减小轨迹跟踪误差,提高控制系统的鲁棒性、适应性、柔顺性以及保证机器人稳定运动。大致情况下,下肢康复机器人的运动控制一般可以分为两大类:一种是给定运动轨迹的轨迹跟踪控制;另一种就是采集人体信息的自主控制。一般的轨迹跟踪控制有比例-微分(PD)控制、滑模变结构控制、计算力矩控制等。根据零力矩点理论分析机器人行进过程的稳定条件,利用稳定裕度的概念,可以很好地避免行走步态中频繁调整躯干姿态而导致的能耗和行进速度问题[7]。其中,滑模变结构控制的非连续控制特性使其与其他控制方法相比有很好的优势,它不仅对数学模型准确性要求低,具有较高的灵敏性,自身的鲁棒性还比较强,操作简单快速,所以本文也采用滑模控制来跟踪轨迹。
1.1 步态规划
人体下肢外骨骼的运动过程最常用的步态规划方法是五点规划法[8]。将下肢运动过程总体划分为5 个姿态,如图1 所示。
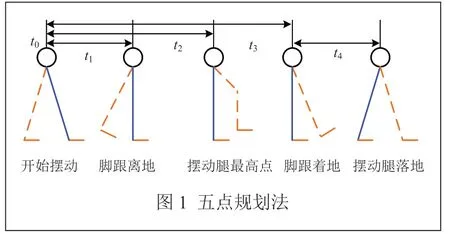
如图,在t0时刻,步行开始,t0+t1时刻,一条腿脚掌抬起,与地面的夹角为θs,t0+t2时刻,摆动腿达到最高点,t0+t3时刻,摆动腿,脚跟着地,脚掌与地面夹角为θf,t0+t3+t4时刻,全脚掌落地。
假设,在第k次下肢行走过程中,步长为s,摆动腿,踝关节与地面的夹角为θ,由图1 可得:
其中,k代表步态周期;t代表时间;θs、θf分别代表脚掌触地不同时刻的角度。
假设,摆动腿在最高点处距离地面为H,距离摆动开始位置为L,所以踝关节位置:
在t0+t1和t0+t3时刻,脚掌触地状态如图2 所示。
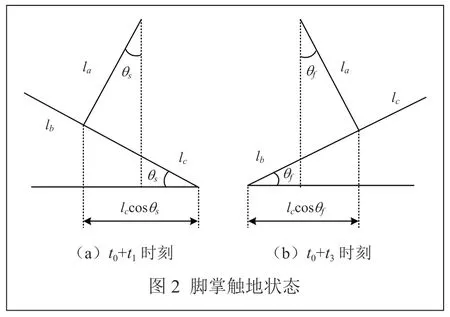
图中,la是踝关节到脚掌的距离;lb是脚跟到脚掌的距离;lc是脚尖到脚掌的距离;θs是t0+t1时刻踝关节和地面的角度;θf是t0+t3时刻踝关节与地面的角度。
t0+t1时刻踝关节位置:t0+t3时刻踝关节位置:
可以得到踝关节在x轴的位置:
踝关节在z轴的位置:
髋关节的步态规划在这里主要是研究髋关节x轴方向的位姿坐标,z轴方向的位姿坐标始终为一个常量,不予考虑[9]。
髋关节在x轴的位置
根据实验实地测量,表1 给出了人体下肢的步态参数,为后续更好地计算提供依据。
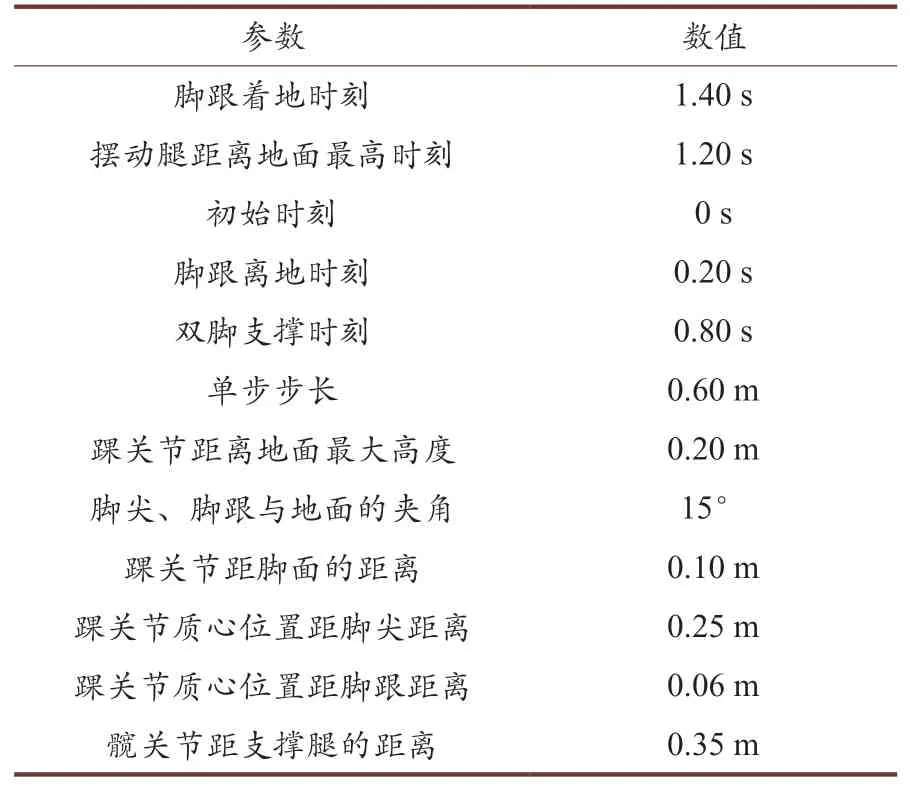
表1 人体下肢步态参数
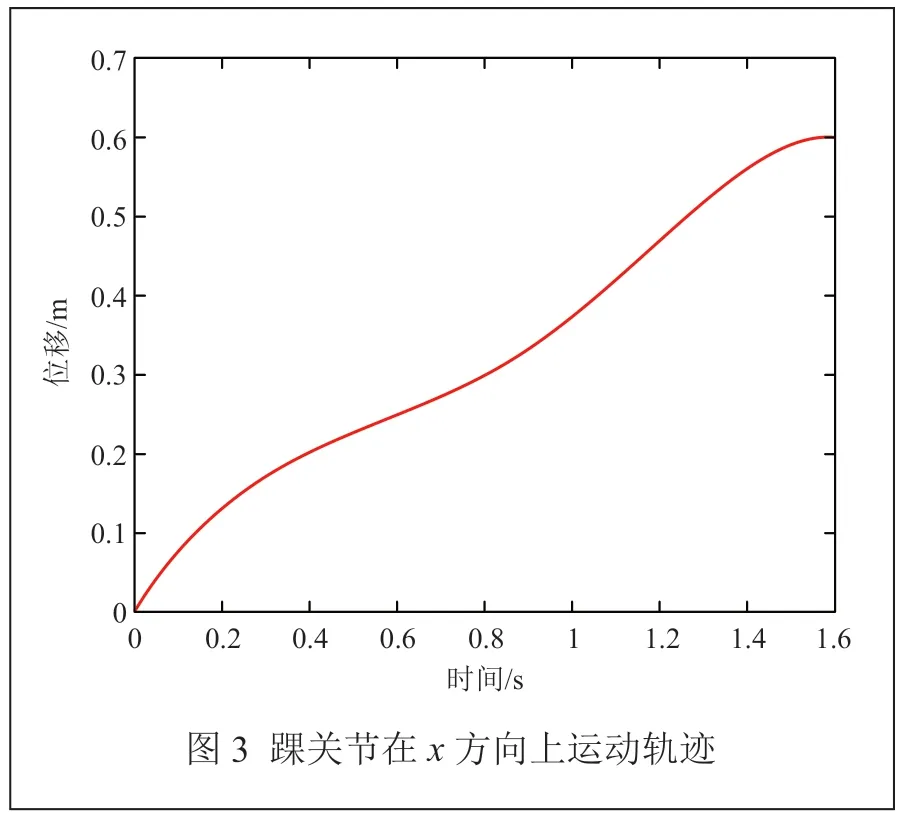
设k=0,并且将表1 中的参数代入公式中,得到踝关节在x轴上的运动轨迹,如图3 所示。
式(9)为踝关节在z轴上的运动轨迹:
踝关节在z轴方向运动轨迹如图4 所示。
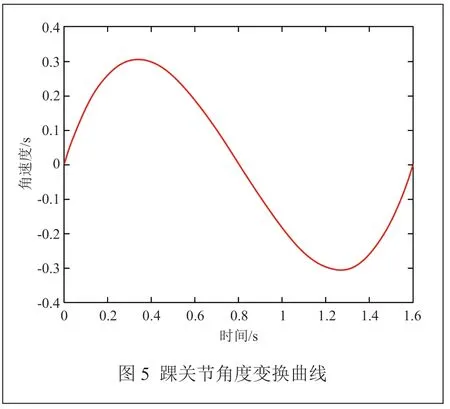
踝关节角度变化参数:
踝关节角度变化曲线如图5 所示。
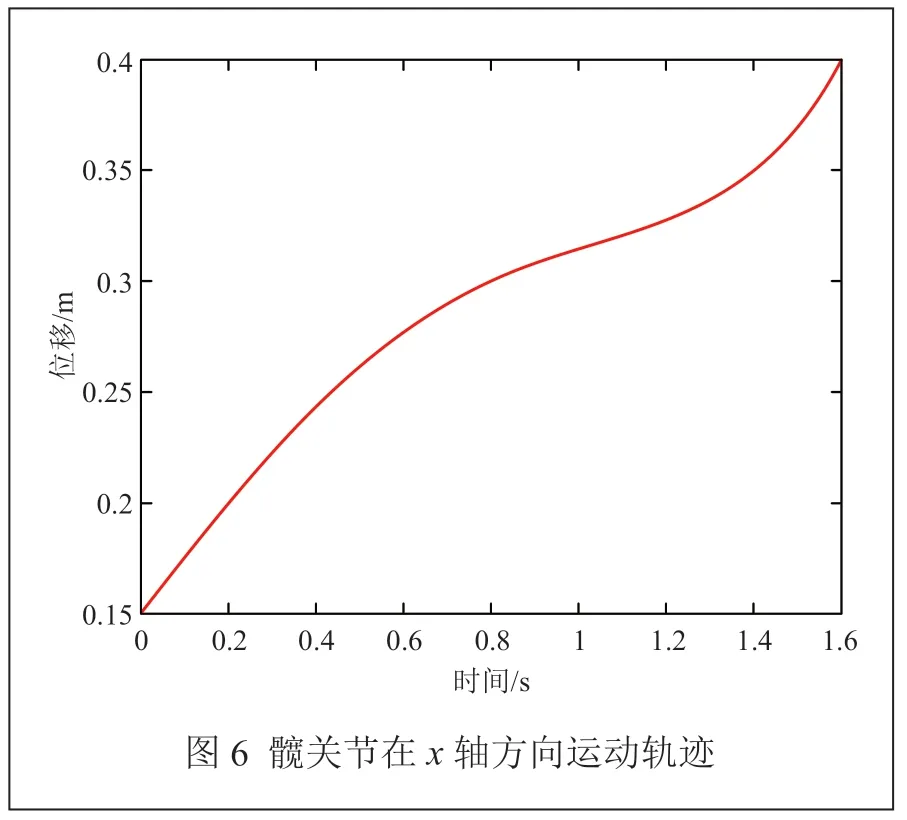
髋关节在x轴方向上的运动参数:
髋关节在x轴方向运动轨迹如图6 所示。
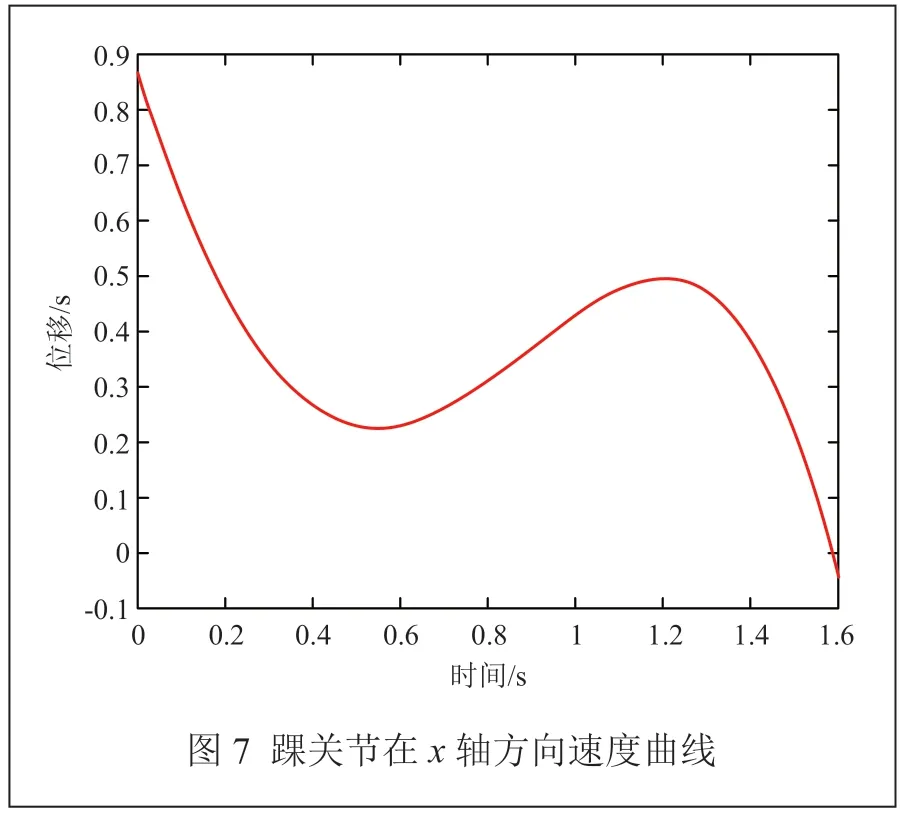
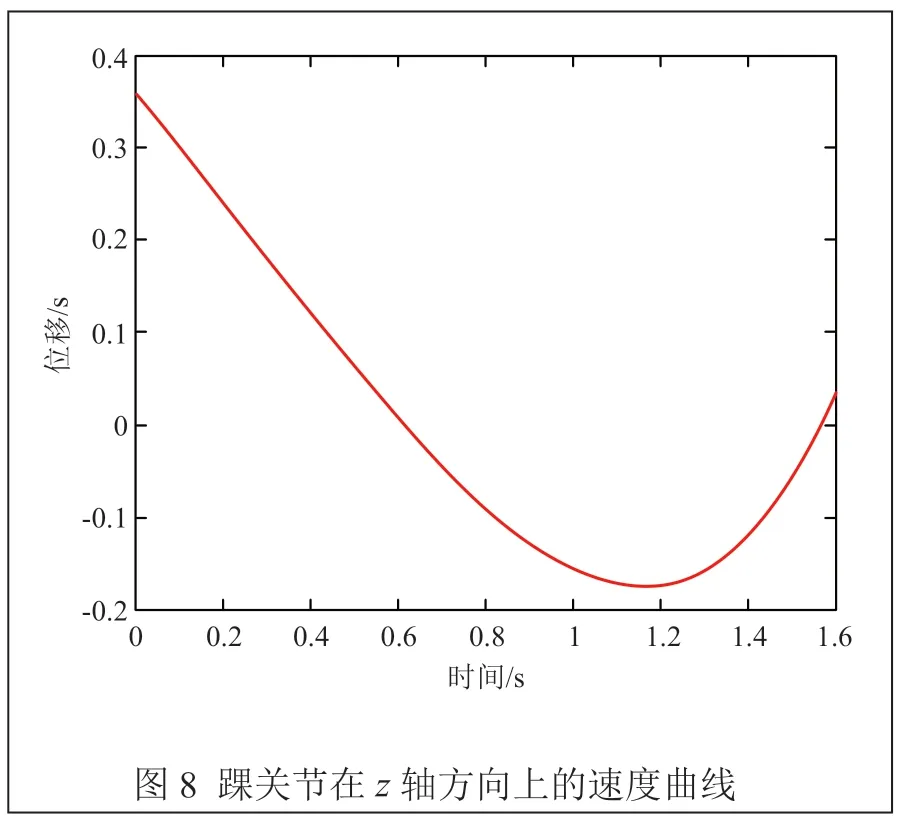
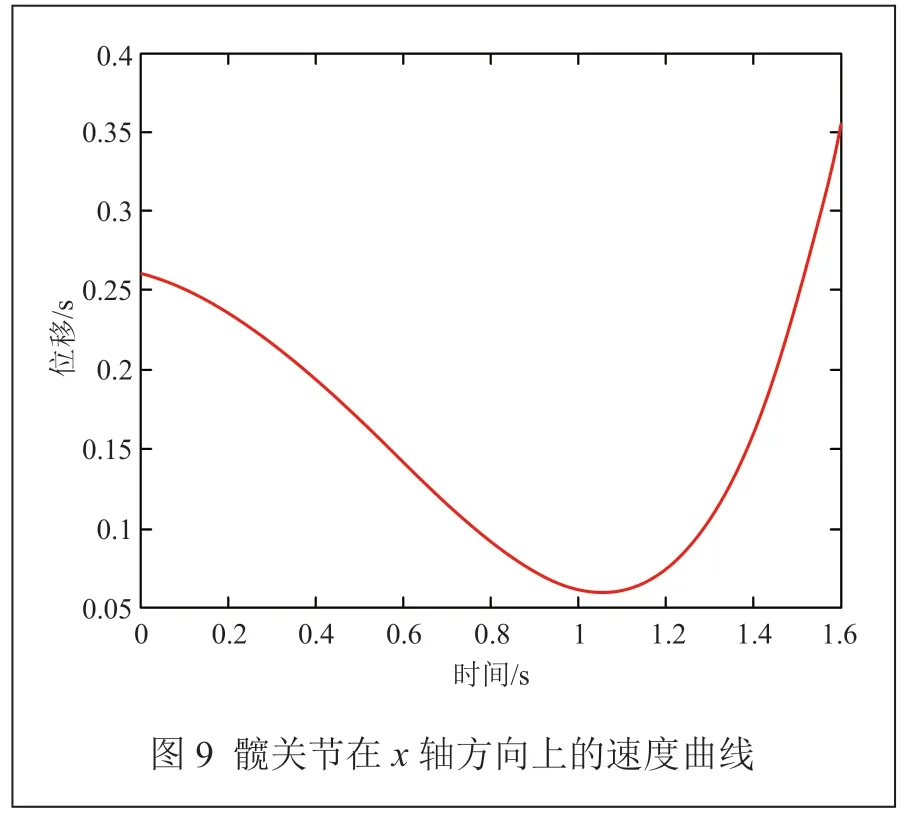
再通过对踝关节、髋关节的位移进行求导,就可以得到关节速度曲线,如图7 ~图9 所示。
1.2 运动学分析
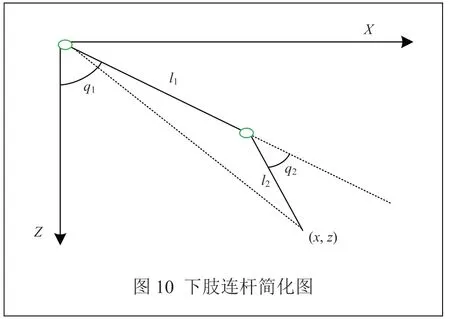
在对其进行运动学分析的时候,可以直接将其简化为一个两连杆结构,如图10 所示。其中,q1代表大腿与z轴的角度;q2代表小腿的转动角度;l2表示小腿长度;l1表示大腿长度。
通过逆运动学解可以得到,在知道机器人末端关节位姿时关节所转过的角度。通过MATLAB 将踝关节在x方向运动轨迹求出得到:
踝关节在z方向运动轨迹为:
这些数据将为后文的控制算法提供数据支撑。
1.3 动力学分析
当患者下肢运动功能丧失时,下肢康复机器人需要对患者提供一定的支撑力来辅助患者进行康复。对下肢外骨骼机器人进行动力学分析,有助于对患者所提供的支撑力更加的科学,避免对患者造成再次伤害。
大腿质心坐标:
大腿质心处速度平方和为:
大腿的动能为:
质心坐标为:
小腿质心处速度平方和为:
小腿的动能为:
小腿的势能为:
系统总动能为:
系统总势能为:
动力学模型为:
其中:
1.4 ZMP 点计算
根据前面解得的关节角度变化轨迹,忽略踝关节的离地高度,则可得机器人双侧下肢连杆质心坐标[10]:
其中,l1代表大腿连杆长度;l2代表小腿连杆长度。
质心位置加速度为:
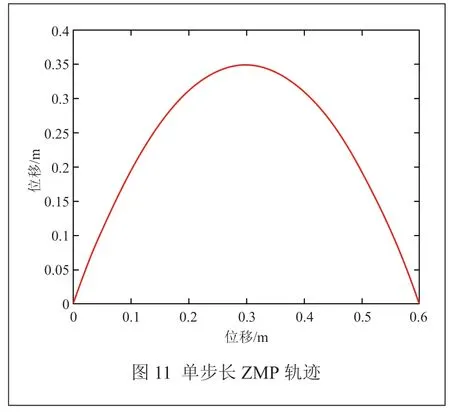
通过前文对各关节的轨迹规划以及ZMP 点公式的计算,可以得到单步长的ZMP 轨迹,如图11 所示。
2 实验平台与实验结果
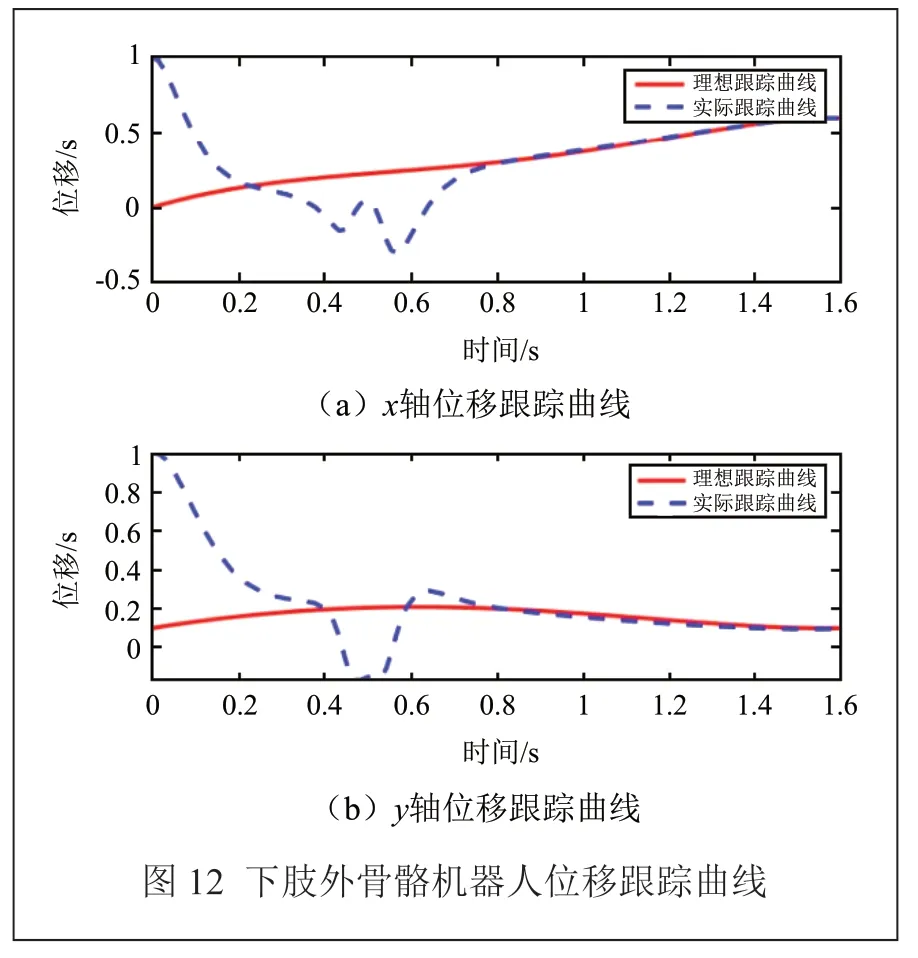
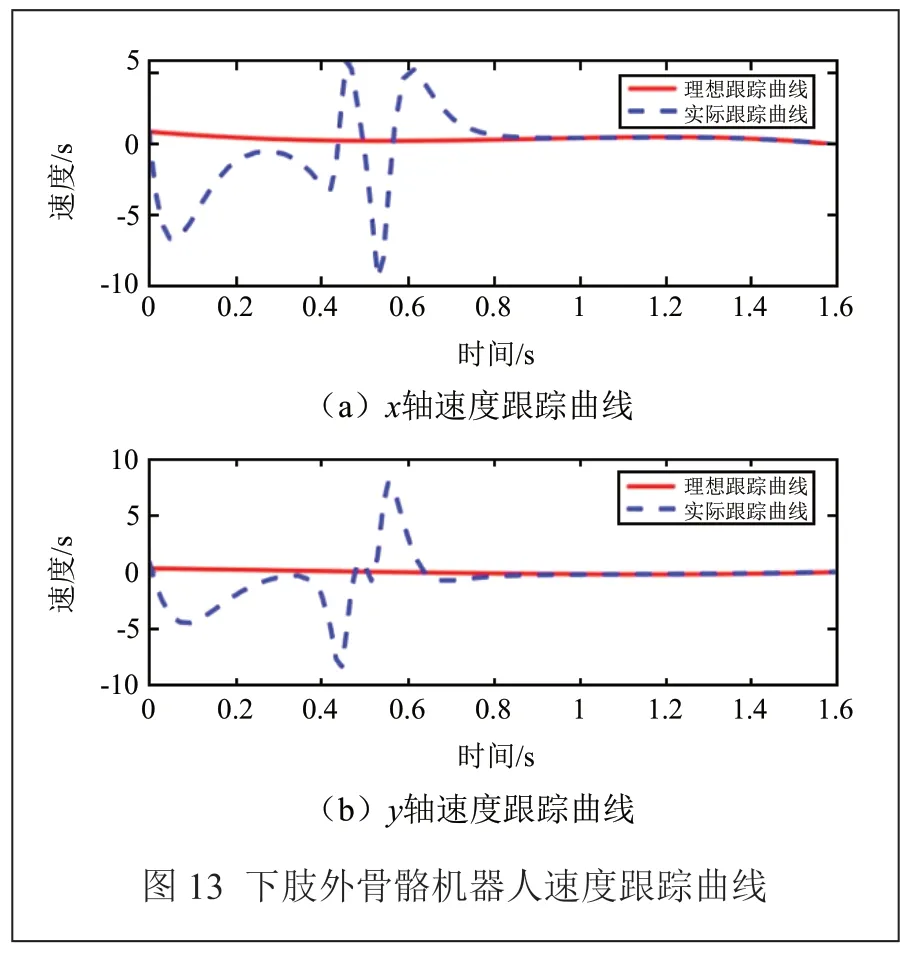
本文通过五点步态规划方法进行了下肢外骨骼机器人步态规划,对于人体步态数据库里的数据和MATLAB 软件进行数据拟合,得到了下肢外骨骼的髋关节、踝关节在一个步态周期里的位移、速度、加速度的轨迹曲线,为后文的控制策略提供了数据支撑。利用滑模控制来对运动轨迹进行跟踪,在MATLAB 中,S_Function 进行代码编写,SIMULINK 进行控制器设计以及仿真。
图12~13 是下肢外骨骼机器人在单步长时间内的位移、速度的跟踪曲线。从图中可以看出,在单步长的前半部分,时间超调量较大,响应时间较长,但是后面的跟踪效果不错。运动过程中,实际ZMP 点轨迹在支撑域内,可以满足稳定步行的需要,证明其在运动过程中基本上可以满足稳定步行的需要。
3 结束语
本文对下肢外骨骼机器人进行了运动学分析,得到了机器人末端关节位置与转动角度的关系,在对下肢外骨骼机器人进行动力学分析后,得到了位移、速度、加速度与力矩之间的表达式。通过ZMP 公式计算出了下肢外骨骼机器人的理想ZMP 轨迹,并因此设计了一种基于ZMP 的控制策略。最后通过实验表明,该控制策略可以有效地保持佩戴者行走的稳定。
猜你喜欢
科学大众(2024年5期)2024-03-06
军事文摘(2024年6期)2024-02-29
故事作文·低年级(2021年9期)2021-11-04
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
创新作文(1-2年级)(2015年9期)2015-10-28
作文周刊·小学一年级版(2015年34期)2015-05-30
发明与创新(2015年33期)2015-02-27