基于PID算法的输电线路无人机巡检路径智能自动规划技术
2023-12-13 14:26李波杨炯李宁陈炜罗宏洋
微型电脑应用 2023年11期
李波, 杨炯, 李宁, 陈炜, 罗宏洋
(宁夏超高压电力工程有限公司, 宁夏, 银川 750011)
0 引言
航空技术的逐渐成熟促使无人机被广泛应用于输电线路巡检工作,无人机具有重量轻、体积小、灵活性好等优势,并且能够实现数据的自动记录和保密传输[1-2],通常采用人工操控方式或依据固定航线完成输电线路巡检任务[3-4],对巡检人员全面、及时掌握输电线路状态以及减少输电线路故障造成的人员伤亡和经济损失具有重要作用。输电线路无人机巡检路径规划是提高无人机巡检效率的有效手段[5],同时对保证无人机安全飞行和有效处理突发问题也发挥着不可估量的作用,因此输电线路无人机巡检路径智能自动规划技术成为国内外研究的热点课题。
目前很多专家均在该课题的研究上取得了重大突破,例如朱程雯等[6]利用ACO技术完成输电线路无人机巡检路径规划,该技术能大幅度缩短巡检路径,但对于复杂地形下的规划效果不甚理想;黄鹤等[7]利用改进飞蛾扑火算法完成输电线路无人机巡检路径规划,该技术避障导航的成功率较高,但较大的计算代价无法满足巡检路径实时规划需求。
PID算法是集比例、积分和微分于一身的过程控制方法,具有参数整定简单和结构灵活等特点,因此本文提出基于PID算法的输电线路无人机巡检路径智能自动规划技术,利用PID算法控制无人机运动状态,使其能够依据规划的路径顺利完成输电线路巡检任务,进而全面提升无人机在输电线路巡检领域的自动化及智能化应用水平。
1 输电线路无人机巡检路径智能自动规划
1.1 输电线路无人机巡检标志点定位
采用数据传输链路将获取的信息传送给移动站接收机,移动站依据观测值,通过差分定位方法计算自身相对于基准站的坐标,并依据基准站坐标计算自身坐标。
输电线路无人机巡检标志点的载波整周模糊度,可使用式(1)所示线性组合模型进行计算:
(1)
式(1)中,对于基准站,它的实时位置及其与基准位置的偏差分别用ΔX、ΔY表示,两者的系数分别用a、b表示。通过最小二乘平差法计算2个系数,能够获得移动站的载波整周模糊度[8],将其代入式(2),即可实现载波侧相伪距观测:
λφi(t)=ρi(t)-I+i(t)+Ti(t)+
C[dti(t)-dti-1(t)]-λNi+Mi(t)+εi(t)
(2)
式(2)中,相位波长用λ表示,相位观测标志点的模糊位置用φ表示,载波侧的整周模糊度用N表示,模糊误差用t表示,各标志点间的几何距离用ρ表示,接收机的钟差和噪声分别用dti、εi表示,对流层误差用T表示,电离层误差用I表示,光速用C表示,多路径的效应误差用M表示。
利用上式可获得对输电线路无人机巡检标志点定位的模糊数据,依据该数据通过式(3)所示三边定位方法完成标志点的坐标定位:
(3)
式(3)中,节点A位置用(x,y)表示,B、C和D3个节点的位置分别用(x1,y1)、(x2,y2)和(x3,y3)表示,三者间的距离分别为λ1、λ2、λ3。将该式转换为式(4)所示线性矩阵方程,对其进行求解[9-11],所得结果即为输电线路无人机巡检标志点位置信息。
(4)
1.2 输电线路无人机巡检路径智能自动规划实现
1.2.1 输电线路无人机动力学模型创建
根据PID参数创建包含无人机高度和姿态两部分的动力学模型,可以更清晰地反映无人机的运动状态。通过牛顿-欧拉理论能得到式(5)所示的输电线路无人机运动规律:
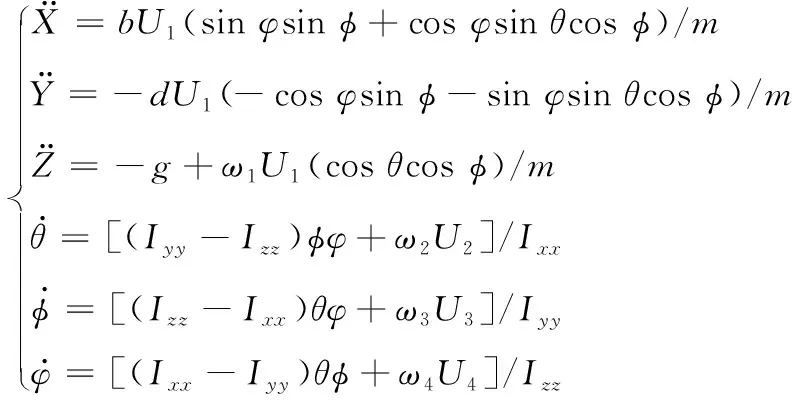
(5)

G(s)=K/(Ts+1)
(6)
式(6)中,时间常数用T表示,当转速阶跃响应达到0.63倍稳态值时,相应的时间即为T,增益用K表示,其获取方式为对无人机的螺旋桨升力进行测试,则无人机电机的传递函数为将所得T、K代入式(6)获得的结果。
针对无人机高度控制模型,令X、Y轴保持不变,仅考量Z轴的变化,则依据式(5)可以得到下式所示Z轴误差值计算过程:
ez=Zref-Z>0
(7)

(8)
同时能得到式(9)所示PID的传递函数:
L(s)=ρTγ(s)
(9)

针对无人机姿态控制模型,偏航角、俯仰角和横滚角对其具有较大影响,根据式(5)采用拉普拉斯变换可获得下式描述的各姿态角的传递函数:

(10)
式(10)中,无人机质心和旋翼中心之间的距离用L表示。
式(11)为PID算法对各姿态角进行控制的误差计算过程:
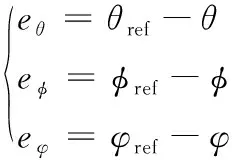
(11)
式(12)中,各姿态角控制的理想值用θref、φref、φref表示,各姿态角输入值用θ、φ、φ表示。则各姿态角闭环传递函数如式(12):

(12)
1.2.2 基于PID算法的路径规划跟踪控制器
PID算法通过比例、积分和微分系数的调整,可以有效抑制外部干扰对无人机的影响,从而使输电线路无人机巡检运动跟踪控制达到较好的稳定性。根据1.2.1创建的输电线路无人机动力学模型,采用内外环控制方案,得到如图1所示的无人机的PID跟踪控制器框图。
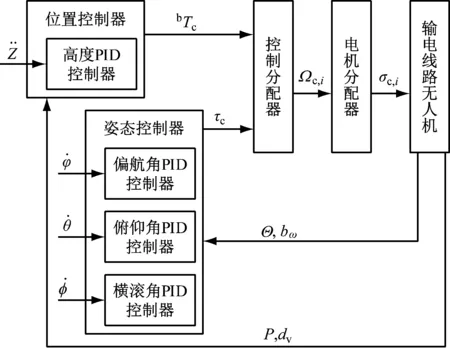
图1 PID跟踪控制器框图
图1中,期望值用下标c表示,螺旋桨期望转速用Ωc,i表示,油门指令用σc,i表示,无人机测量出的三维坐标与速度分别用P、dv表示,无人机测量出的姿态角与角速度分别用Θ、bω表示。在PID跟踪控制器中,内环用于控制无人机姿态,外环用于控制无人机位置,使用下式描述PID跟踪控制器结构:
(13)
式(13)中,PID跟踪控制器的输入与输出分别用e、u表示,积分和微分系数分别用kI和kD表示,积分与微分时间常数分别用TI、TD表示,比例系数用kp表示。
1.2.3 输电线路无人机巡检路径智能自动生成
假设无人机中心位置及其和障碍物的距离,分别用lOA、lOD表示,则使用下式描述任意方向上无人机巡检飞行的安全距离:
(14)
式(14)中,无人机的自由度用m表示,无人机和障碍物的安全距离最大系数用λ表示。通过该式确定lOA、lOD后,利用下述过程完成输电线路无人机巡检路径规划。

(15)
P={Ps,p1(x1,z1),p2(x1,z1),…,pn-1(xn-1,zn-1),Pt}
(16)
2 结果分析
将某输电线路巡检区域作为实验对象,其为同塔双回线路,一路在运行,另外一路停电检修状态,线路长度为7.433 km,导线型号为2×LGJ-630/45,试验前确保线路全线贯通,平均设置10个待巡检标志点,分别对应现场电源、接地、线路等具体情况。在使用Simulink搭建的仿真环境中,利用本文技术控制无人机采集该区域的环境图像信息,并完成无人机巡检路径智能自动规划,进而驱动无人机按照规划的路径到各标志点完成输电线路巡检任务。
通过本文技术对输电线路无人机巡检区域的各标志点进行定位,所得结果如表1所示。

表1 输电线路待巡检标志点定位结果
从表1可以看出,在X、Y、Z方向的标志点定位误差皆低于0.25,可保证定位准确性,说明本文技术具有较好的定位效果,有助于提升后续路径规划精度和推动输电线路无人机巡检任务的顺利执行。
假设输电线路无人机巡检时的飞行姿态包含向前直行、倒退、悬停、左转45°、左转90°、右转45°和右转90° 7种,分别用字母A~G表示,测试本文技术使用前后,无人机完成各飞行姿态后的抖动范围,结果如图2所示。

图2 无人机完成各飞行姿态后的抖动范围
从图2可以发现,本文技术使用前,输电线路无人机完成各飞行姿态后的抖动范围在12°~16°之间,本文技术使用后,抖动范围大幅度缩小,始终保持在2°~4°之间,这是因为在初始状态时,设定了各姿态角控制的理想值,内外环共同控制下的PID控制参数应用性能得到优化,增加飞行姿态控制效果,缩小抖动范围。
从输电线路无人机巡检区域选择大小为160 km×180 km的子区域进行仿真分析,在其内设置5个障碍物和2个禁飞区,分别用编号A1~A7表示,P点代表无人机起始点,Q点代表无人机目标点,使用本文技术规划的输电线路无人机巡检路径以及无人机实际飞行路径,用图3描述。

图3 无人机巡检路径规划结果及实际飞行结果
分析图3可以看出,在复杂环境条件下,本文技术规划的输电线路无人机巡检路径能够避开全部障碍物和禁飞区,且规划的路径接近一条直线,总航程较短;无人机实际飞行路径与本文技术规划的路径基本重合,且在A6和A7两个分布十分密集的禁飞区之间仍能顺利通过。因此表明,本文技术具有较理想的输电线路无人机巡检路径智能自动规划效果,且避障能力较为优异,同时本文技术可以稳定地控制无人机按照规划的路径进行输电线路巡检。
测试本文技术使用后,无人机在输电线路巡检区域完成巡检任务过程中的飞行路径,具体用图4描述,其中实心圆点代表各待巡检标志点。

图4 无人机完成输电线路巡检时的飞行路径
由图4可得,本文技术的输电线路无人机巡检路径智能自动规划效果较优良,能够实现输电线路巡检任务的全面覆盖,有利于保证输电线路运行安全。
3 总结
为全面提升无人机完成巡检任务时的效率,研究基于PID算法的输电线路无人机巡检路径智能自动规划技术,规划出总航程较短的巡检路径,具备较优异的避障能力,且该技术引入PID算法能在有效保证无人机飞行稳定性的同时,控制无人机依据规划的路径顺利抵达目标点完成全部巡检任务,以期为无人机安全运行和顺利完成既定任务提供保障。
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29
学生天地(2020年5期)2020-08-25
学生天地(2020年3期)2020-08-25
测控技术(2018年12期)2018-11-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
传感器与微系统(2018年7期)2018-08-29
电子测试(2018年10期)2018-06-26
汽车博览(2016年9期)2016-10-18
交通建设与管理(2015年15期)2015-03-20