智慧停车库技术改造选型与创新应用研究
2023-12-13 09:48张楠马耀家陈骏张景州
微型电脑应用 2023年11期
张楠, 马耀家, 陈骏, 张景州
(江苏苏星资产管理有限公司, 江苏, 南京 210000)
0 引言
截至2021年6月,全国机动车数据量超过3.3亿辆,机动车驾驶人达到1.12亿人[1]。汽车产业迅速发展的同时带来了新的问题,汽车数量与停车位数量之间的比例相差较大,在我国一线城市中小汽车与停车位的比例为1∶0.8,在中小城市的比例为1∶0.5[2],造成停车问题越来越严重。在城市道路交通中,随意乱停车的问题造成道路拥堵,严重影响了道路交通状况。
智能停车场的建设成为解决停车问题的一个途径。文献[3]采用了图像识别技术采集出入口车辆图像,完成车辆识别并在系统中实时显示停车位资源的使用情况。文献[4]设计出智能泊车综合管理系统,使用智能泊车机器人和停车场监控实现自动泊车和自动计费的功能。当前研究在停车库领域取得了一定的进展,但仍存在停车位信息反馈不及时导致停车位使用效率低、系统无法对停车位资源进行统一调度的问题,系统停车路径规划不合理,出现路径过长和转弯角度过大的情况。
1 智慧立体停车库系统
1.1 停车库空间结构
为了提高停车库中空间资源的利用率,使每个停车位得到有效的利用,对停车库进行改造设计,使用垂直提升机、水平行走机、搬运器、存车架等部件,设计出智慧立体停车库。停车库为3栋多层的结构设计,在停车库入口处设置升降台,并且每层停车位中间设置平移轨道,能够通过机械载体框架提高停车库的连续出入库能力,组合式框架设计提高停车效率。使用水平行走机搭载搬运器实现横向移动,在用户存车的情况下,水平行走机搭载待存车辆向系统分配好的目标停车位移动,完成存车操作后返回初始位置[5]。智慧立体停车库结构模型如图1所示。

图1 智慧立体停车库结构模型
1.2 系统设计
停车库系统具有自动存取车、停车位查询、安全检测等功能,用户通过系统界面完成自动存车请求,系统接收到用户请求后自动分配1个空闲停车位,由升降机完成车辆的入库。系统内部集成了MySQL数据库,可随时查询车辆的停车信息,更清楚地展示车辆的存取状态[6]。安全检测功能用来对待存车辆的重量和存入停车位之后的偏移程度进行检测,当车辆超重或停放不到位时系统发出安全警报并定位到停车位的位置。智慧立体停车库系统架构如图2所示。
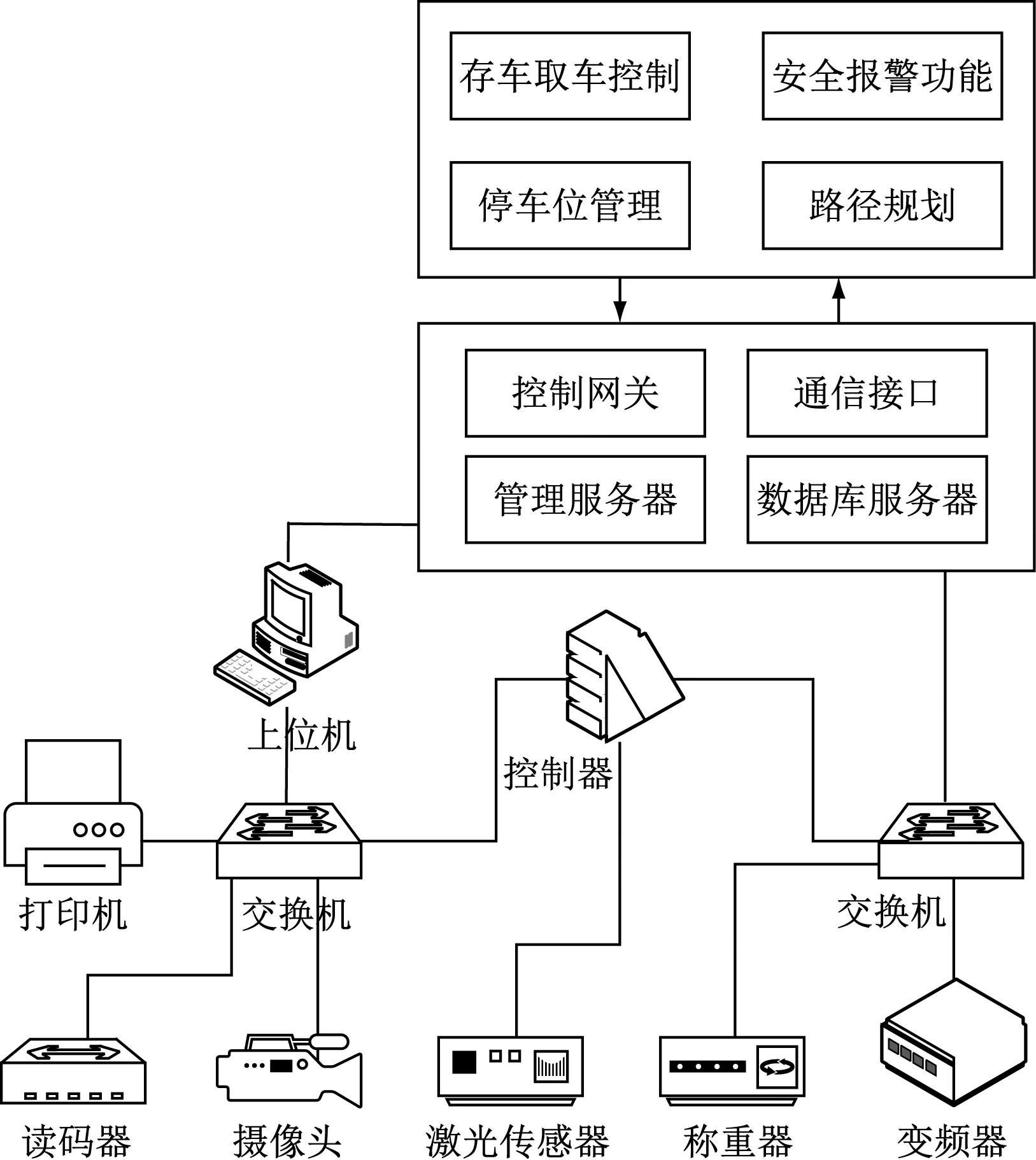
图2 智慧立体停车库系统架构
智慧立体停车库系统中主要包含了操作单元、检测单元、控制器、读码器等设备,控制器与变频器之间使用Profinet I/O的通信协议[7]。用户使用系统界面完成存车操作时,系统存储车辆信息和停车位信息,并生成条形码控制打印机打印条形码。同时,根据系统分配的停车位信息,水平行走机行驶到相应的车列位,升降机上升到相应的层数,搬运器抬起行驶到目标停车位处,搬运器下降将车辆停放在停车位上并移回存车架[8]。进行取车操作时,使用了型号为DATAMAN260的固定式读码器读取存车时生成的条形码,系统读取到车辆信息后水平行走机移动到相应的位置,搬运器抬起将车辆移动到搬运器上,升降机下降到地面位置,水平行走机移动到出入库位置。
2 关键技术分析
2.1 停车库环境温度检测
系统使用分布式感温光纤、红外热释电传感器和温度传感器。感温光纤通过采集整个光纤路径的温度场信息来实现整个光纤线路的温度测量,经过系统对温度数据处理后实现火灾的探测,并联动报警系统实现报警功能[9]。分布式感温光纤检测过程如图3所示。

图3 分布式感温光纤检测过程示意图
由于光照强度的大小和感温光纤自身的温度存在高低,每段感温光纤的温度数据不同,由此可定位出发生火灾的位置[10]。系统的温度探测组件使用红外热释电传感器,包括多组透镜和反光镜。利用热电效应原理,可以在不同区域完成目标探测,采集到的信号经过处理和转换后进行判断。红外热释电传感器如图4所示。

图4 红外热释电传感器
当外界温度发生变化时,红外热释电传感器就会产生电压或电流;当连接外围电路时,可以测量出电流的大小;当温度升高和降低时,电流的方向也是相反的[11],辐射强度与温度的变化关系可表示为
(1)
式(1)中,Wr表示辐射强度,C1表示第一辐射常数,λ表示波长,c2表示第二辐射常数,T表示温度。
智慧停车库中使用的温度传感器测温范围为-40 ℃~60 ℃。其中,基准电路为温度传感器提供正温度系数的输入信号,其他模块的电压、电流基准不随温度的变化而改变[12]。传感器使用低压差线性稳压器为电路提供稳定的供电电压,满足传感器中其他模块的工作需求,具有较好的电源抑制能力。带隙基准电路产生零温度系数的电压基准。带隙基准电路如图5所示。

图5 带隙基准电路
其中,M6、M9、M10、M11、M12管组成电流镜,将生成的基准电流复制给电路中其他支路。当处于其中一个工作点时,其他支路的电流都为0;当产生的基准电压VBG时,M8管导通,放大器开始工作。当电路中使能信号为高电位时,PDn表示高电位、PDp表示低电位。
2.2 停车位资源调度策略

(2)

(3)
其中,di表示停车位距离,dN表示停车位最远距离。考虑到停车时间对停车位资源调度的影响,当有车辆的停放时长较长时,且占有距离较近的停车位造成停车场的周转率降低。停车位资源调度分配策略如图6所示。
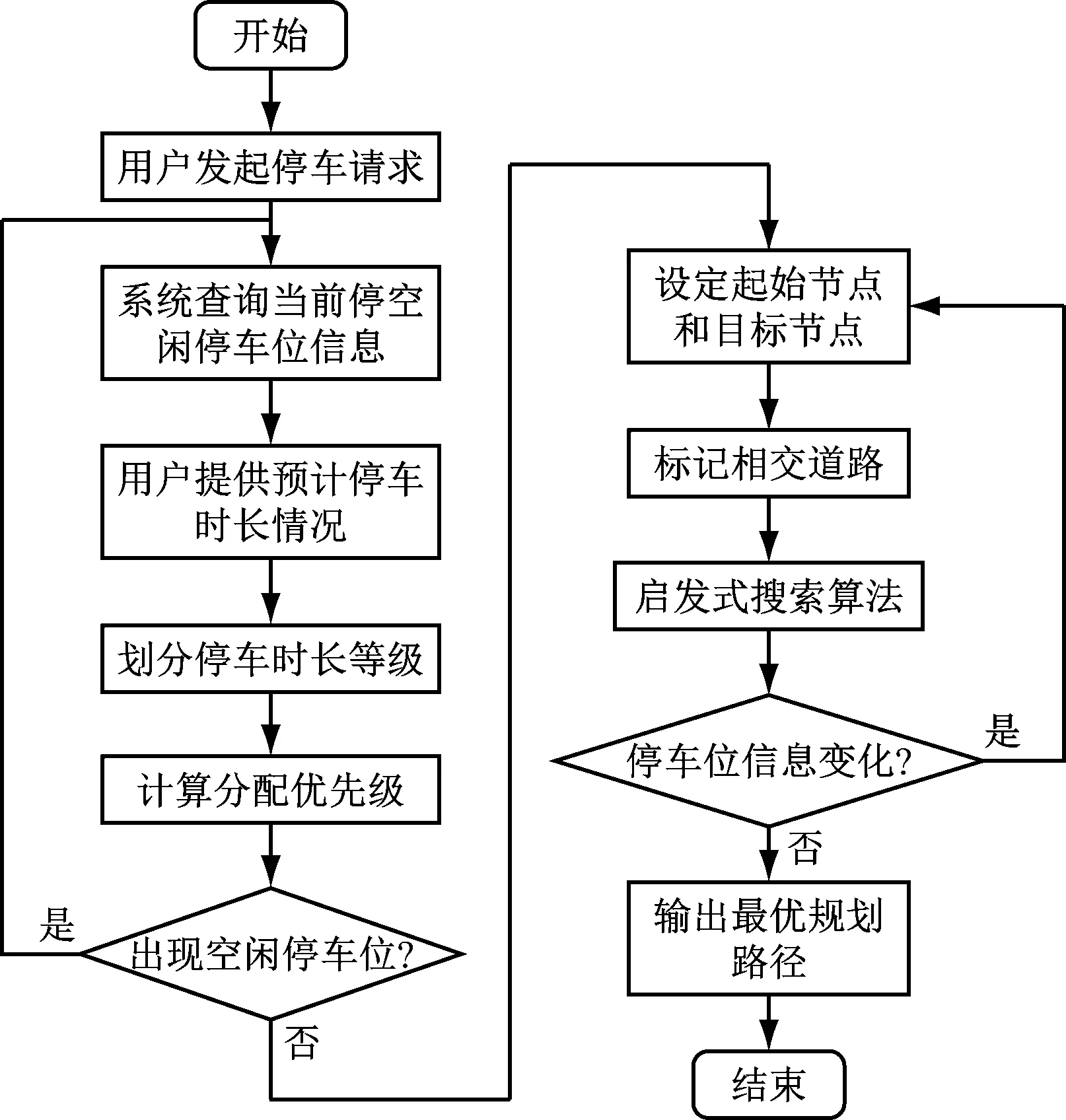
图6 停车位资源调度分配策略
系统在收到用户的停车请求时,向停车时间长的车辆分配距离适当的停车位,大部分车辆的停车时间为[Tmin,Tmax]范围内。将停车时间划分为N个等级,每个等级之间的时间间隔相同,系统在获取停车位分配的优先级时,首先判断待停车辆停放时间所处的等级,得到分配优先级可表示为
(4)
式(4)中,Tl表示停车时间等级,Tp表示停车时间,N表示停车时间等级数,Tmax表示停车时间最大值,Tmin表示停车时间最小值。
F(n)=G(n)+H(n)
(5)
其中,n表示当前节点,G(n)表示到起始节点的行驶距离,H(n)表示到目标节点的行驶距离。当起始节点和目标节点处于不同的通道时,截取通道Pss和交叉路口IS对应的路径,再加上通道PGG到交叉路口IG和到目标节点对应的路径,计算要经过的交叉路口并规划最短路径,将所有的片段串联得到最终的行驶路径。
3 应用测试
停车库中的触摸屏界面使用V15编程软件,系统使用了MySQL数据库,数据库名称为XUESSHATE。车位界面如图7所示。

图7 车位界面
为了验证本文系统的性能,搭建实验环境进行仿真测试,实验环境中应用了数据库服务器、交换机、路由器等设备,使用FANagv仿真软件,停车库中停车位设定为300个。实验环境如图8所示。实验环境配置参数如表1所示。

表1 实验环境配置参数

图8 实验环境
实验过程中产生的车位状态信息、任务信息和车辆信息如表2所示。
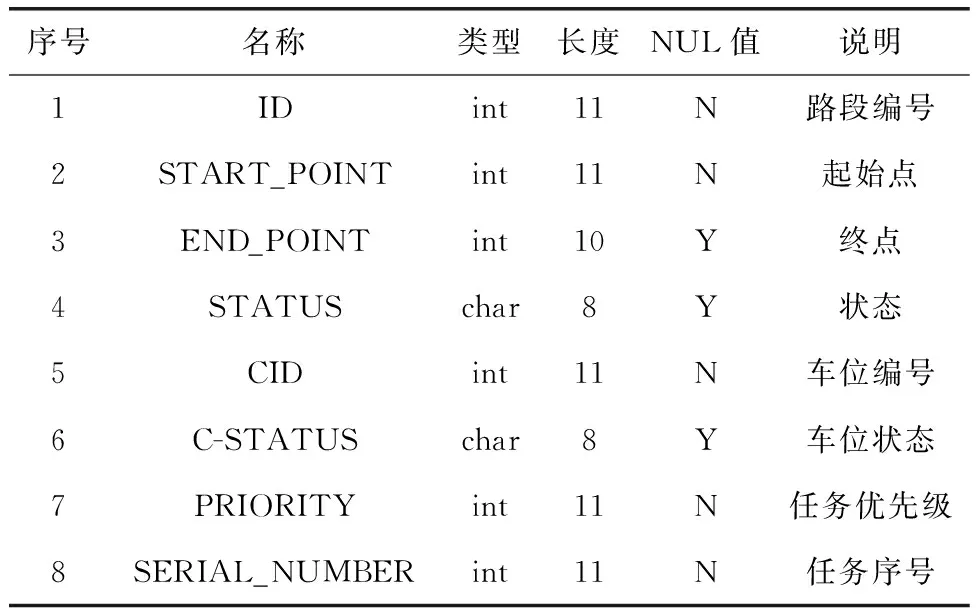
表2 实验数据
通过实验对系统的停车位资源调度策略进行测试,与文献[3]系统和文献[4]系统进行比较,对停车库中300个停车位进行编号,每个停车任务的停车时间设定为0~360 min,将停车时长划分为720个等级,每个停车时长等级的时间间隔为30 s。系统设定每个时段的任务密集度为每2分钟生成1个停车任务,每个停车任务的停车时长在0~180 min范围的概率为70%。实验时间设定为3 h,得到3种系统的停车周转率如图9所示。

图9 停车周转率
在停车任务较为密集的情况下,3种系统的停车位资源调度表示的周转率也不同。文献[3]系统的周转率为4.5%,文献[4]系统为6.0%。当停车库中车辆较多时,可用的停车位资源降低,导致系统的停车周转率不高。停车周转率越高,说明用户停车效果好,智慧停车库的AI程度高,该研究技术越有价值。
在进行停车路径测试时,每个停车任务的停车时长保持不变,任务密集度设定为0~1,系统运行时间为20个时段,得到每个停车任务的平均行驶路径长度如图10所示。

图10 平均行驶路径长度
由图10可知,当任务密集度较小时,每个停车任务的平均行驶路径长度都在256 m以上,任务密集度上升到0.4时,文献[3]系统的停车路径长度达到257.2 m,文献[4]系统的停车路径长度为255.4 m,任务密集度到达最大时,文献[3]系统的停车路径长度为256.3 m,文献[4]系统的停车路径长度上升到259.2 m。文献[3]系统受任务密集度影响不大,平均行驶路径在一定范围内波动,文献[4]系统根据距离安排停车位,停车任务较多的情况下,距离较近的停车位被分配出去且长期被占用,导致行驶距离增加。平均停车路径长度越长,说明该研究中的车库数据运转能力越高,停车运转空间大。
4 总结
本文设计出智慧立体停车库,采用多层多列的建筑结构,保证停车库的停车安全性。系统采用多种温度检测装置结合使用的方式满足停车库各个场景的温度检测需求,还提出一种停车位资源调度策略,同时考虑到用户的初始位置和停车时间的需求,判断车辆停车时间所处的等级,计算停车位的分配优先级,得到目标停车位后生成对应的最优行驶路径。
在停车库的实际应用场景中,可能存在其他环境因素影响用户的停车效率,在系统规划的行驶路径中存在障碍,比如受到工作环境数据信息的影响,周围电力磁波、温度等各种环境信息影响,或者周围施工噪声的干扰等各种因素影响,在以后的研究中还需联动系统的视频监控功能,开发出更完善的系统功能。
猜你喜欢
智能建筑电气技术(2022年2期)2022-02-06
英语文摘(2020年7期)2020-09-21
数学小灵通(1-2年级)(2019年5期)2019-05-21
电子制作(2019年23期)2019-02-23
自然资源情报(2018年7期)2018-12-28
遵义(2018年13期)2018-08-08
小太阳画报(2018年3期)2018-05-14
阅读与作文(小学低年级版)(2016年12期)2016-12-22
少年博览·小学低年级(2016年9期)2016-11-24
汽车文摘(2015年11期)2015-12-02