
冷原子一体化全自主高精度导航研究进展
2023-12-11 13:17谢宏泰康泽豪
宇航计测技术 2023年6期
谢宏泰,康泽豪,胡 栋,王 宇
(北京长城计量测试技术研究所,北京 100095)
1 引言
以北斗、GPS 为代表的卫星定位、导航与授时系统有着高精度时空分辨率,已深入到国防和民用的方方面面。在诸如水下、地下、深空等场景,则难以通过卫星定位导航,并且卫星信号有着被干扰和欺骗的风险。
自主导航则可作为一种补充,解决上述问题。自主导航主要指惯性导航系统或其与辅助匹配导航系统的组合。其中惯性导航的实现所需获取的惯性力为三个方向的角速度和三个方向的加速度,传感器分别对应陀螺仪与加速度计。目前的经典惯性传感器稳定性问题较为严重,在长时航程下惯性导航无法做到高精度定位。而基于重力场与重力梯度场匹配的辅助导航可以在保持无源、隐蔽、高抗干扰和全天候的情况下对航行位置进行校准,减小惯性导航的发散误差[1,2]。其中重力场包含较多的低频信息,重力梯度场包含较多的高频信息,两者结合可以实现信息的互补,有效地降低反演中的多解性。
1991 年,斯坦福大学首次利用受激拉曼跃迁研制了冷原子干涉仪并测量了重力加速度[3]。此后30 多年,冷原子干涉仪成为了国际研究热点,并发展出了绝对重力仪[4-7]、重力梯度仪[6,7]、陀螺仪[8,9]、加速度计[10,11]等量子精密测量仪器,在许多基础研究和工程领域发挥了重要作用。冷原子干涉仪基于物质波原理,其理论灵敏度极限比经典传感器高出许多个数量级。以陀螺仪为例,在相同的干涉回路面积下,原子干涉陀螺仪的相移是光学干涉陀螺的mλch-1≈1011倍,其中m,λ,c,h分别代表原子质量、光波长、真空中的光速、普朗克常数。即使考虑原子干涉回路面积一般远小于光学干涉的回路面积,他们的相移比依然可达到104量级[12]。因为自由落体的原子定义了惯性参考系,冷原子干涉仪提供的是绝对惯性力测量,具有自校准能力,有望实现极小积累误差的惯性导航。同时,冷原子干涉仪在重力、重力梯度移动测绘上逐步开展研究[9,15-19],为实现重力场和重力梯度场匹配辅助导航奠定了基础。这些工作,展示了冷原子干涉仪在一体化、高精度自主导航上的优势和发展潜力。
2 冷原子一体化自主导航国内外研究进展
在冷原子干涉仪中,为提高物质波波动性及与激光的作用精度,一般首先把原子系综通过磁光阱(MOT)及光学黏团方法冷却至μK 水平。之后,以三脉冲的受激拉曼跃迁为例,以同样的时间间隔T依次对原子系综作用三次拉曼光,使得原子波包被分开、偏转、合束,形成干涉回路。最后通过检测原子内态来得到干涉相移,从而提取出惯性信息。此相移为[15]
式中:keff——拉曼光有效波矢;a——载体加速度;v——原子质心速度;Ω——载体角速度;Φ0——初始相位。
可知,单个原子干涉仪是同时对加速度和角速度敏感的,在不同情况下,这个特性可以成为冷原子惯性传感器的优势或劣势。所以本节不以陀螺仪和加速度计进行分类,而是以原子干涉仪不同构型进行分类,对以应用于自主导航为目的的冷原子惯性传感器的研究进展进行阐述。
2.1 单MOT 型冷原子干涉仪
2011 年,法国光学研究所与巴黎天文台把原子重力仪搬到飞机上,并在飞机自由落体阶段进行加速度测量,得到了微重力下的加速度测量灵敏度展示了冷原子干涉仪在太空微重力下的基础研究和应用可能性[16]。
2012 年,美国圣地亚实验室基于单MOT 原位干涉、探测和原子重捕获方法,研制出了一种采样率为50~330 Hz 的原子干涉仪,灵敏度可达证明了冷原子传感器在某种程度上适用于载体快速变化的场景[17]。
2013 年,美国斯坦福大学提出了基于点源干涉技术的冷原子惯性传感器,它利用了单个原子团的膨胀效应和空间成像进行了三轴惯性(Ωx,Ωy,g)的测量和分离。原子团制备后,存在一个速度分布,干涉完成后,不同的速度的原子跟同样的角速度耦合所贡献的相移不同,当利用CCD 进行原子团的空间成像时,不同位置对应着不同的相移,根据相移的空间梯度和方向等信息可以推断出角速度信息,从而可以从总相移中分离出角速度和加速度。2019 年,美国国家标准技术局(NIST)基于点源干涉技术研制的三轴惯性传感器在5~10 Hz 的采样率下的加速度测量灵敏度为角速度灵敏度为积分1 000 s 后角速度稳定度为50 μrad/s,单次测量死时间为84%,其原理如图1 所示。

图1 NIST 的点源干涉冷原子三轴惯性传感器测量原理图Fig.1 Scheme of 3-axis inertial sensor based on cold atom point source interference by NIST
2016 年,法国巴黎天文台利用四脉冲法(π/2 -π-π-π/2)和水平方向的拉曼光,巧妙运用了交替原子制备和拉曼干涉方法,实现了零死时间的水平角速度测量[18]。又因其干涉回路面积大、相移与T3成正比,可实现超高灵敏度。2018 年,在此基础上,在2T时间内将上抛原子团次数改成3 次,以3.75 Hz的采样率,实现了的灵敏度,积分10 000 s 后的稳定度则达到了0.3 nrad/s,打破了冷原子干涉陀螺仪稳定度记录[9]。2022 年,他们增加了一对拉曼光,两对拉曼光在x和y方向,可测量水平方向的两个角速度[19]。此装置如图2 所示,需要严格水平摆放,但无法测量加速度和竖直方向的角速度,一般用作水平角速度的静态测量。
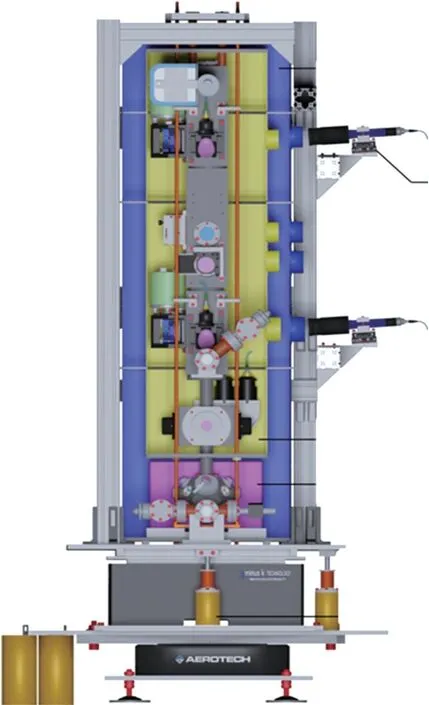
图2 巴黎天文台的四脉冲冷原子陀螺仪示意图Fig.2 Diagram of the four-pulse cold atom gyroscope of Observatoire de Paris
iXBlue 近年来着重研发适用于工业、国防和太空领域的冷原子惯性传感器。2016 年,他们提出了一种单MOT 方案,探头结构与原子重力仪类似,但在3 个正交方向都有拉曼光,即可以测量3 个方向加速度[20]。2018 年,他们把另一个仅对竖直方向加速度敏感的原子干涉仪(即原子重力仪,与2016年的构型不同)与经典加速度计组合,并利用了卡尔曼滤波法,实现了400 Hz 的带宽和10 ng@11 h的稳定度[21]。2022 年,他们把三轴原子加速度计与经典的三轴加速度计进行组合使用,如图3 所示,兼顾了1 kHz 的高带宽采样率和积分24 h 后0.06 μg的高稳定度[22],为基于冷原子传感器构造出捷联式惯性导航提供了一种可能性,但这都是在假设载体无转动速度的前提下。
2017 年,美国加州伯克利大学使用金字塔结构和单激光器方案实现了多轴惯性测量,其系统简单,功耗小[23]。如图4 所示,当分别在竖直方向和两个垂直金字塔内表面的方向打拉曼光时,会测到包含相应方向加速度的信息,再应用四脉冲法,可以分离角速度,有望实现全惯性力的测量,但单次测量无法解出单个惯性力,需要联合方程组,要求测量过程保持静止。在1 Hz 的单次采样率下,其加速度测量灵敏度为积分10 000 s 的稳定度为0.04 μg;角速度测量灵敏度为其单次测量的死时间约为92%,则作6 次测量时每个惯性力测量的死时间达99%。
2017 年,圣地亚实验室基于玻璃气室实现了原子干涉测量[24]。其系统简单、体积小,不需要高真空和激光制冷,而是利用多普勒效应来选取气室中的“冷原子”,动态范围可达88 g,采样率高达104Hz,并且有望扩展到三轴线性加速度的测量。但灵敏度仅为积分600 s 的稳定度为0.1 g,也无法排除角速度影响。

4 加州伯克利大学金字塔多轴冷原子惯性传感器示意图Fig.4 Scheme of cold atom multi-axial inertial sensor based on pyramid by UC Berkeley
2019 年,帝国理工大学与M Squared 公司研发出了用于探测水平加速度的原子加速度计,其基本结构与冷原子重力仪类似,但拉曼光方向水平[10]。在4 Hz的测量频率下,加速度测量灵敏度为积分40 s 的稳定度为此装置无法排除角速度影响。
2019 年,iXBlue 联合公司提出了一种基于三维双衍射的理论模型,如图5 所示,有望在单MOT 构型下实现6 轴全惯性量(三轴加速度与三轴角速度)的同时测量且可各自解耦[25]。在制备原子团后,对原子在三个正交方向同时打时间间隔为T的三脉冲拉曼光,最终形成12 个空间分离的马赫-曾德干涉仪,以空间成像的方法得到各自相移从而解出6 个惯性量。在这个理论中,原子团制备后的初速度带来的影响会被差分消除,而与角速度耦合的原子速度是由拉曼光精确传递的,有望显著减小惯性测量的误差和不稳定度。最重要的是以简单的构型实现了6 轴全惯性量的同时测量,并且装置姿态任意,在惯性导航的应用上有较大潜力,但至今只在理论层面进行讨论。
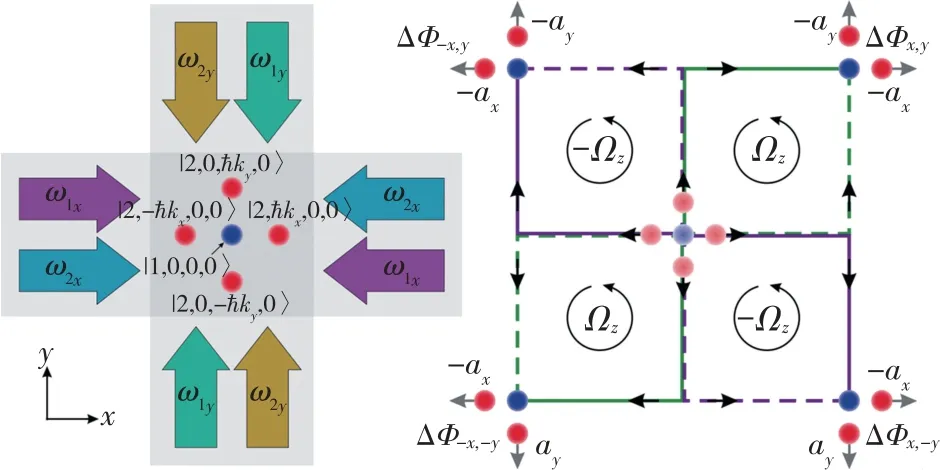
图5 iXBlue 的双衍射六轴冷原子惯性传感器方案原理图Fig.5 Scheme of cold atom 6-axis inertial sensor based on double diffraction by iXBlue
2.2 双MOT 型冷原子干涉仪
从公式(1)可知,单个原子干涉仪同时对加速度和角速度敏感,但若存在另一个MOT,使得两个原子团对抛,他们的质心速度大小相等、方向相反或有着一个特定夹角,利用同样的拉曼光完成原子干涉,由于两个干涉仪所感受到的拉曼光波矢、载体加速度和载体角速度完全相同,联立方程组则可对加速度和角速度解耦。若以灵敏度为目标,原子飞行时间和干涉时间间隔会较长,为保证两个干涉仪的对称与重合,需要斜抛并根据重力加速度设定起抛角度。如果飞行时间较短,在完成干涉后原子轨迹还是近乎直线,则可以采用简单的平抛对射方案。
2006 年,巴黎天文台通过三脉冲和四脉冲组合的方法,在斜对抛的原子干涉仪中实现了6 轴惯性的独立非同时测量[8,26],如图6 所示。在1.7 Hz 的采样率下,加速度测量灵敏度达到了积分5 000 s 后稳定度为1 ng,而角速度测量灵敏度为积分1 000 s 的稳定度为10 nrad/s。

图6 巴黎天文台的冷原子斜对抛六轴惯性传感器原理图Fig.6 Scheme of oblique parabola cold atom 6-axis inertial sensor of Observatoire de Paris
同样是基于斜对抛方案,2018 年,武汉精测院的原子干涉对抛陀螺仪所实现的角速度测量灵敏度为积分2 000 s 后的稳定度为62 nrad/s[27],如图7 所示。2022 年,华中科技大学的原子干涉对抛陀螺仪灵敏度为积分40 s 的稳定度则达到了30 nrad/s,如图8 所示。这项工作还研究了真空腔外的空气扰动引起的拉曼光波前变化与测量不稳定度的关系[28]。

图7 武汉精测院的冷原子斜对抛惯性传感器原理图Fig.7 Principle of oblique parabola cold atom inertial sensor by WIPM

图8 华中科技大学的冷原子斜对抛惯性传感器结构图Fig.8 Structure of oblique parabola cold atom inertial sensor by HUST
2009 年起,德国汉诺威尔大学采用了近乎平抛的双MOT 方案,如图9 所示。其干涉时间间隔仅为4 ms。他们使用了对称组合脉冲方法,原子在自由演化阶段灵敏度函数为0,很大程度上免疫了非惯性的噪声。其角速度测量灵敏度为120 nrad/s,积分100 s 的稳定度为26 nrad/s[29-31]。
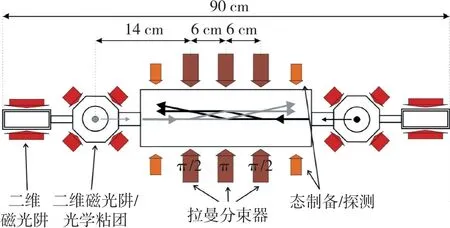
图9 汉诺威尔大学的冷原子平对抛惯性传感器结构图Fig.9 Structure of the opposite-launch cold atom inertial sensor of University by Hanover
2014 年,圣地亚实验室在一个玻璃腔内实现了双原子团直线对抛,如图10 所示,由于采用了交换原子团并重新捕获制备原子团的方法,他们在没有二维MOT 情况下也有效减小了装载时间和死时间,重复率可达50~100 Hz,也保证了极小的体积,实现了加速度和角速度的双轴独立同时测量[32],其加速度灵敏度为角速度灵敏度为稳定度指标未见说明。其较短的原子飞行时间使得装置工作姿态任意,在与水平面倾斜0°~70°条件下进行试验,其对比度和捕获的原子数基本保持不变,加速度和角速度测量动态范围也较大。
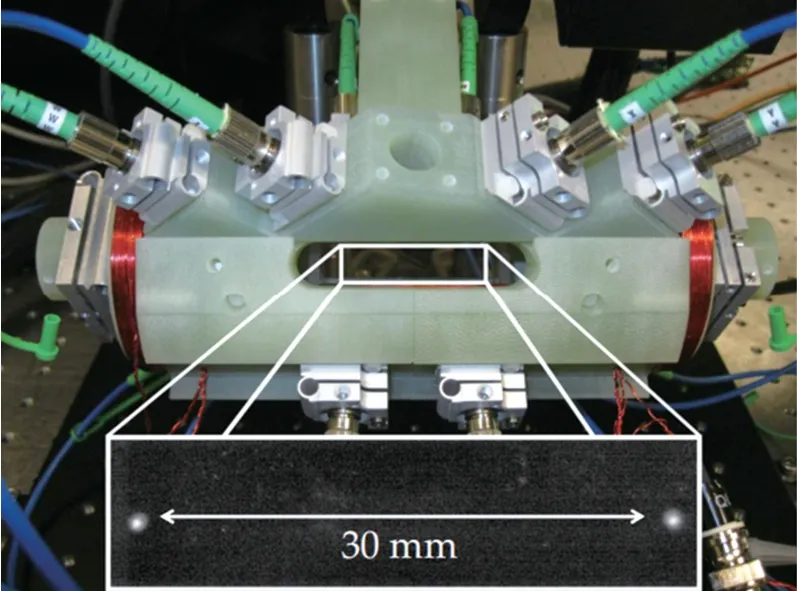
图10 圣地亚实验室的冷原子平对抛惯性传感器实物图Fig.10 Picture of opposite-launch cold atom inertial sensor of Sandia
在平抛方案中,早期的原子干涉陀螺仪采用了热原子对射的方式,纵向速度达到了290 m/s,装置干涉管道长达两米[33],优点是用来干涉的原子是连续的,可达到零死时间。当忽略惯性力时,原子干涉回路面积其中v0是原子纵向速度是约化普朗克常数。由于干涉区域的长度l=2v0T,且测量灵敏度正比于A,为了在保证灵敏度的前提下缩小装置体积,只能降低v0并提高T。所以之后主流转为三维MOT 制备冷原子,一般为脉冲式制备。而清华大学小组为了保留零死时间的特点[34,35],采用了低速浓密源方案[36],与一般的三维MOT 不同之处在于其中一端的波片和反射镜中心有小孔,冷却的原子就会源源不断从小孔打出去形成原子束,如图11所示。2022 年,他们在干涉时间仅为0.87 ms 情况下,加速度测量灵敏度为积分3 000 s后的稳定度为0.13 μg;角速度测量灵敏度为积分10 s,稳定度为35 μrad/s[37]。
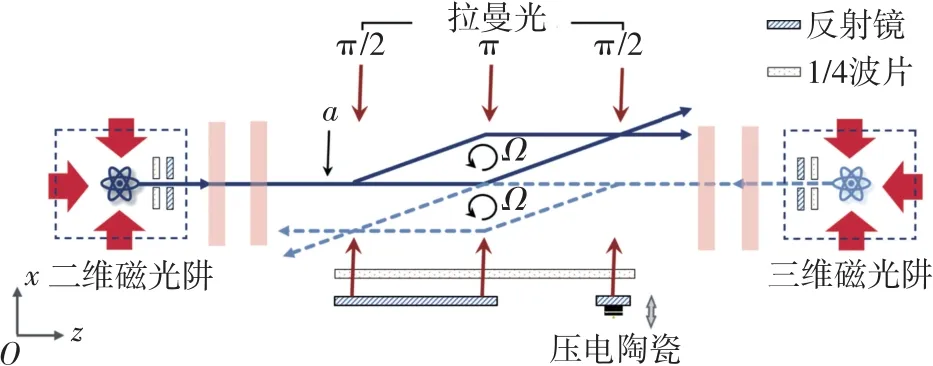
图11 清华大学的冷原子束流对射惯性传感器结构图Fig.11 Structure of the continuous cold atomic beams inertial sensor of Tsinghua University
3 冷原子自主导航各类技术方案分析
本节分析以自主导航为出发点,从惯性测量维数(3 个角速度和3 个加速度)以及各个量之间是否可解耦、装置工作姿态限制、灵敏度、稳定度、采样率、死时间、战术指标SWaP-C(Size,Weight,Power and Cost,即尺寸、重量、功耗、成本)、动态范围等各方面对以上技术方案进行分析和比较。
对于加速度和角速度不可解耦的冷原子惯性传感器方案,以iXBlue 为例[22],其目标是在隔绝角速度前提下测量加速度,期望利用安装了光纤陀螺仪的偏摆台实时进行三轴角速度补偿稳定。但对于惯性导航,航行误差也受限于经典陀螺仪,其不稳定度同样会导致偏摆台上的加速度计敏感轴与设定敏感轴之间发生夹角漂移从而增大航行误差,所以更为推荐使用可解耦的方案。
在装置工作姿态上,如果惯性传感器要求保持水平才能工作,则对应平台式惯导方案。以双MOT对抛方案为例,当原子飞行时间过长时,必须考虑重力加速度对原子运动轨迹的影响,斜抛方案对应的腔体形状是在特定的重力加速度下进行设计的,即便假设倾角的变化能够被偏摆台补偿掉,线性加速度的变化也不能补偿,会对原子运动轨迹造成影响,甚至可能碰到腔壁,这就要求装置保持水平且加速度较为恒定,所以适合静态测量。而装置工作姿态任意对于实现捷联式惯导是必要条件之一,所以更为推荐。另外,上抛式四脉冲冷原子陀螺仪[9]虽然只能在静态下测量,但或许能够作为惯导系统初始状态方向校准中所使用的寻北仪。
我们从角速度测量动态范围来进一步考虑。原子在飞行阶段时处于惯性空间,拉曼光跟旋转的载体一起处于非惯性空间,当转速过快时,会造成两个原子波包重合性差,从而造成干涉对比度下降,即干涉条纹对比度随着角速度增大而呈高斯型衰减。设载体角速度Ω的方向与干涉回路面积矢量方向重合、Ω=0 时干涉对比度χ=1,则有[38]
式中:kB——玻尔兹曼常数;Tem——原子团温度;σΩ——对比度关联的角速度动态范围。
可见原子团温度越高或干涉时间越长,角速度动态范围越小。线性加速度超过原子干涉仪的动态范围的话,尚且可以配合经典传感器同时工作然后作数据补偿或者混合叠加[39,21],两者协同工作;而角速度的动态范围包括相移周期(与加速度动态范围类似)和原子波包错位程度两个概念,后者会使得原子干涉仪只能处于死时间,由经典传感器单独工作。在未来惯性导航中,虽然在角速度很大的时间段内原子干涉仪可以不工作,近稳态航行时再利用超高稳定度的原子干涉仪对经典传感器校准,但若是原子干涉仪的角速度动态范围过小,那么可能在整个航行阶段都不会存在原子干涉仪可工作的时间窗口。为保证较高的角速度动态范围,除了需要把原子团制备到更低温度,也需要考虑使用干涉时间较小的方案。
而对于冷原子对抛方案,其喷泉系统较为复杂,并且原子起抛速度如果不稳定,会跟拉曼光的波前畸变耦合在一起引起惯性测量的长漂[40]。如若采用对抛方案,原子速度需要进行精确控制,并尽可能保证拉曼光不共模的光学元件高平整度。
4 结束语
基于冷原子的陀螺仪、加速度计、重力仪和重力梯度仪具备超高灵敏度和稳定度的潜力,有望构造出一体化的无源全自主高精度导航系统,成为了国际上的研究热点。在本文中,综述了国际上的相关研究,并从惯性力测量是否可解耦、是否可捷联式工作、动态范围等方面进行分析,为适用于一体化自主导航的方案选择提供参考。
但在实用化过程中还需解决诸多难点。目前的冷原子惯性传感器的发展趋势是继续提高测量长期稳定性、增强装置的鲁棒性和降低SWaP-C,同时需要走出实验室,在外场、载体上不断进行试验,以推进冷原子一体化全自主导航的实现。
猜你喜欢
风流一代·经典文摘(2023年5期)2023-05-21
九江学院学报(自然科学版)(2022年2期)2022-07-02
宇航计测技术(2021年3期)2021-08-17
计测技术(2020年6期)2020-06-09
航天电子对抗(2019年4期)2019-06-02
电子测试(2018年18期)2018-11-14
制导与引信(2017年3期)2017-11-02
光学精密工程(2016年1期)2016-11-07
电测与仪表(2016年12期)2016-04-11
橡胶工业(2015年2期)2015-07-29
