柔性直流送出系统交流线路的自适应距离保护方法
2023-12-11 10:01吴通华1郑玉平1孙志攀周博昊何佳伟
电力系统自动化 2023年22期
洪 丰,吴通华1,,郑玉平1,,孙志攀,周博昊,何佳伟
(1.河海大学能源与电气学院,江苏省南京市 210098;2.南瑞集团有限公司(国网电力科学研究院有限公司),江苏省南京市 211106;3.电网运行风险防御技术与装备全国重点实验室,江苏省南京市 211106;4.智能电网教育部重点实验室(天津大学),天津市 300072)
0 引言
柔性直流输电是一种以电压源换流器为基础的新型直流输电技术,具有良好的可控性和适应性,对于新型电力系统建设中大规模新能源消纳有着重大作用[1-2],在孤岛输电、弱电网供电、新能源并网、海上风电外送等方面有其独特优势[3-4]。
由于柔性直流输电特殊的系统结构[5]、快速灵活的功率调节[6-7]以及本体控制保护动作的快速性改变了交流电网运行的基本特性,故障响应过程的非线性与不确定性显著增强[8],基于同步机特性设计的线路距离保护面临着严峻挑战。
针对新能源或柔性直流系统接入对距离保护的影响,国内外学者进行了一定研究。文献[9-10]分析得出,逆变型电源短路电流幅值受限和相角受控使得过渡电阻对新能源场站侧的影响被放大,导致场站侧距离保护容易拒动、系统侧距离保护不受影响。文献[11]分析了逆变型电源在不同故障类型下的暂态特征,并指出可能对距离保护产生影响的因素。文献[12]推导了逆变型电源等效正负序阻抗解析表达式,并给出了基于高频阻抗的保护方案,利用阻抗角解决了距离方向元件不正确动作的问题。文献[13]提出了故障穿越期间系统控制保护协同方案,通过注入四倍频扰动电流进行故障辨识,提高了相间故障距离保护的灵敏度。文献[14-15]提出基于模型识别的时域距离保护方法,但近端故障时可能存在无法辨别方向的问题,并且工程实用化还有一定难度。文献[16]提出一种高频突变量距离保护方法,利用故障点电压跌落产生的高频信号进行区内外故障判别,但高频信号易受干扰,可能会对判别结果造成影响。文献[17]分析了分布式逆变型电源的故障特性及其对距离Ⅱ段保护的影响,提出了适用于含分布式逆变型电源的距离Ⅱ段保护整定方案,但没有从原理层面分析解决距离保护可能存在的不正确动作问题。
目前,主流阻抗继电器主要分为比幅式和比相式两类。其中,基于正序电压极化的比相式阻抗继电器因其出口无死区、方向性好的优点,得到了广泛应用。然而,针对基于正序电压极化的比相式距离保护在柔性直流系统中适用性的研究较少。
因此,本文首先分析了柔性直流系统控制策略对故障序分量幅值、相位的影响,阐述了基于正序电压极化的阻抗继电器基本原理,并指出了其在柔性直流近端或电网侧背后发生相间故障时不正确动作的原因。其次,基于结合故障初瞬自然响应阶段时域信息的快速方向判别元件,提出了自适应调整动态范围的距离保护方法。最后,根据中国江苏如东海上风电经柔性直流送出工程拓扑参数,在实时数字仿真系统上搭建系统模型进行性能测试,验证了所提方法的有效性。
1 柔性直流送出系统交流线路故障特性分析
以海上风电经柔性直流送出系统为例,其拓扑结构如图1 所示。其中,海上风电场一般由永磁同步发电机和箱式变压器构成。永磁同步发电机经箱式变压器升压后接入海上升压站,随后接入海上换流站,经直流海缆后接至陆上换流站,最后与交流电网进行连接。换流站采用模块化多电平换流器,桥臂由半桥子模块连接构成。

图1 柔性直流送出系统拓扑结构Fig.1 Topology of flexible DC transmission system
柔性直流送出系统交流侧发生不对称故障时,由于存在负序电压分量,换流器阀侧会产生负序电流,其在直流系统中会引起较大的故障电流,导致加速换流站闭锁,甚至损坏功率元件。因此,换流站一般采用滤除负序电流的正负序解耦控制方法。
换流器控制系统主要由功率外环控制结构和电流内环控制结构两部分组成:外环控制结构负责计算控制变量参考值;内环控制结构负责快速跟踪功率外环给定的参考值。其中,电流内环控制的正、负序控制子系统可表示为:
式中:L、R分别为等效电感、电阻;、和、分别为正序有功、无功电流和负序有功、无功电流测量值;KP1、KP2、KP3、KP4和KI1、KI2、KI3、KI4分别为各电流控制器的比例和积分系数;if、if和、i分别为正序、负序有功电流参考值和正序、负序无功电流参考值。
在柔性直流系统正方向或电网侧背后故障时,故障电流由柔性直流侧提供,受柔性直流系统负序电流抑制和低电压穿越控制影响,所提供的正序电流的相位出现受控偏移。以图2 所示柔性直流系统近端BC 相间故障为例,正序电压、电流相位偏差与常规电源相比存在较大差异,可能对距离保护动作特性造成影响。图中:UmA、UmB、UmC和ImA、ImB、ImC分别为保护安装处的三相测量电压和测量电流;I1、I2分别为保护安装处正序电流、负序电流;φ为保护安装处正序电压和正序电流的夹角。
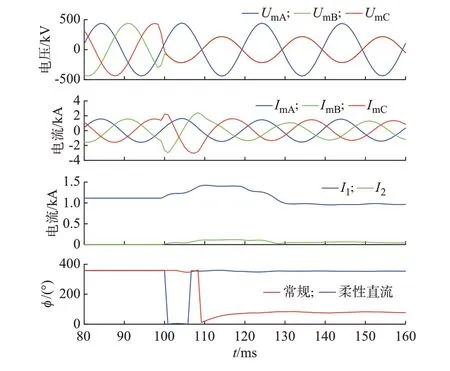
图2 电压、电流采样值及幅值、相位关系Fig.2 Relationship among voltage and current sampling values, amplitudes and phase
2 基于正序电压极化的阻抗继电器适用性
2.1 基于正序电压极化的阻抗继电器工作原理
基于正序电压极化的阻抗继电器动作方程为:
正方向相间故障时,阻抗继电器的动作方程可以表示为[18]:
式中:Zm为测量阻抗;ZS为保护背侧等值正序阻抗。该动作特性是以Zset与-ZS/2 两点连线为直径的圆。
反方向相间故障时,继电器的动作方程可以表示为:
式中:ZR为保护正方向等值正序阻抗。该动作特性是以Zset和ZR/2 两点连线为直径的上抛圆。
正向故障时,基于正序极化电压的阻抗继电器的阻抗动作圆包含坐标原点,故近端故障时无死区;反向故障时,继电器的测量阻抗落在第Ⅲ象限,无法进入上抛动作圆内,该阻抗继电器具有良好的方向性。
2.2 柔性直流系统故障穿越控制对阻抗继电器的影响
由式(3)可知,基于正序电压极化的阻抗继电器动作行为由极化电压和工作电压的相位差决定。对于单相接地故障或相间接地故障,极化电压由系统侧支撑,故障前后相位稳定,且由于系统零序回路相对独立,零序分量基本不受柔性直流系统控制策略影响,具有良好的方向性。同时,柔性直流系统在故障期间对正序电流幅值的限制以及对负序电流的抑制使得故障电流以零序电流为主。结合接地距离继电器工作电压表达式,其与极化电压相位差可准确区分区内外故障时的不同特征。因此,接地距离继电器具有明确的方向特征,没有误动或拒动的风险。
本文仅分析相间故障时距离保护的动作情况。以BC 相间金属性故障为例,基于正序电压极化的阻抗继电器动作方程为:
其中,极化电压为:
式中:a为旋转因子,a=-0.5+j/2。
结合柔性直流系统故障穿越期间负序电流抑制策略的影响,补偿电压可表示为:
故有
即
将正序电压、正序电流相量的相位差定义为β,则动作方程为:
由式(11)可知,基于正序电压极化的阻抗继电器动作特性受β的影响,而此角度的大小由柔性直流系统低电压穿越期间的控制策略决定。由于柔性直流系统电网侧变换器采用基于电网电压定向的电压、电流双闭环矢量控制策略[19],以矢量方向为d轴方向,可得
式中:id、iq分别为d轴电流、q轴电流。
换流站交流侧发生不对称故障时,正序电压降低,且由于定功率控制环节的存在,需增大正序电流参考值f,实际正序d轴电流也随之提高。然而,由于当前电力电子技术及换流站成本的制约,功率器件的过电流裕度较小,需在换流器电流限幅环节设置一较小限值。因此,在故障发生后,最大为设定限值,实际正序d轴电流也将在电流内环控制的作用下迅速追踪其参考值而达到限值[20]。
对于无功功率控制环节而言,其无功功率参考值一般设为0[21],这就使得q轴电流参考值为0。因此,即使换流器交流侧发生不对称故障,无功功率的 传 输 仍 因q轴 电 流为0 且 保 持 不 变。因 此,式(12)中iq远小于id,可认为β≈0°。
对于柔性直流侧保护,柔性直流送出线路发生近端相间故障,结合式(11),可知arg(Zm-Zset)≈270°,当β为 大 于 零 的 小 值 时,距 离 保 护 拒 动,如图3(a)所示;同理,对于电网侧保护,电网侧母线发生相间故障,距离保护误动,如图3(b)所示。
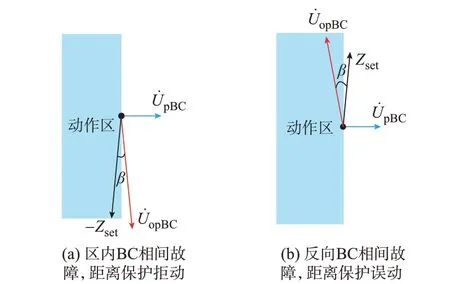
图3 柔性直流系统控制策略影响下的继电器动作特性Fig.3 Relay operation characteristics under influence of control strategy of flexible DC system
3 结合暂态信息的自适应距离保护方法
3.1 基于暂态时域信息的快速方向元件
如附录A 图A2 所示,对于柔性直流交流侧故障,暂态过程可分为:1)暂态自然响应阶段;2)控制器动态响应阶段;3)控制器稳态控制阶段。其中,在故障初瞬的暂态自然响应阶段,柔性直流系统调控还未启动,电压、电流故障分量的方向特性不受影响。线路正、反方向金属性故障时故障附加状态分别如图A3(a)、(b)所示。
因此,正方向短路的基本关系式为:
反方向短路的基本关系式为:
在故障初瞬的暂态自然响应阶段,可近似认为arg(ZS)=arg(ZR)≈90°,因此,构建模拟阻抗ZD=1∠(-90°)。将式(13)、式(14)左右同乘ZD可得:
3.2 距离保护动作范围自适应调整
由上述分析可知,式(11)中β≈0°,造成距离保护在动作边界附近有误动或拒动的风险。在利用暂态时域信息快速判别方向的基础上,适当调整距离保护动作范围即可避免这些风险。因此,构造如下距离保护动作方程:
式中:α为保护自适应调整角度。
考虑β≈0°,再综合柔性直流控制策略偏差、采样和计算误差等因素,在快速方向元件判断为正方向故障时,α建议取15°;判别为反方向故障时,α建议取-15°。这样,正方向故障时,扩大后的保护动作范围包含了β的影响区域,如图4(a)所示,确保正方向相间故障时距离保护可靠动作;反方向故障时,缩小后的保护动作范围避开了β的影响区域,如图4(b)所示,保证反方向相间故障时距离保护可靠不动作。

图4 自适应阻抗继电器动作特性Fig.4 Operation characteristics of adaptive impedance relay
具体实现过程中,构造两个带偏移角的比相式距离继电器。
距离继电器1:
距离继电器2:
如附录A 图A4(a)所示,正方向故障时,自适应距离保护动作范围为两个继电器的“或”(苹果型);如图A4(b)所示,反方向故障时,保护动作范围为两个继电器的“与”(透镜型)。本文所提方法只是对距离保护动作范围做了适当调整,并没有对其动作特性造成本质性影响,并且正方向故障时所采用的苹果型距离继电器也具有较好的抗过渡电阻能力。
4 仿真分析
4.1 仿真模型及参数
采用半实物仿真模型验证本文所提距离保护方法的有效性。在实时数字仿真系统上,搭建基于江苏如东海上风电柔性直流送出工程参数的仿真模型,如附录A 图A5 所示,并与外置现场可编程门阵列(field programmable gate array,FPGA)通信实现柔性直流的阀控策略,仿真步长为50 μs,具体仿真参数如表1 所示。距离保护定值设置为80%线路全长阻抗,并设置4 个故障点F1、F2、F3、F4,进行各种故障类型仿真。
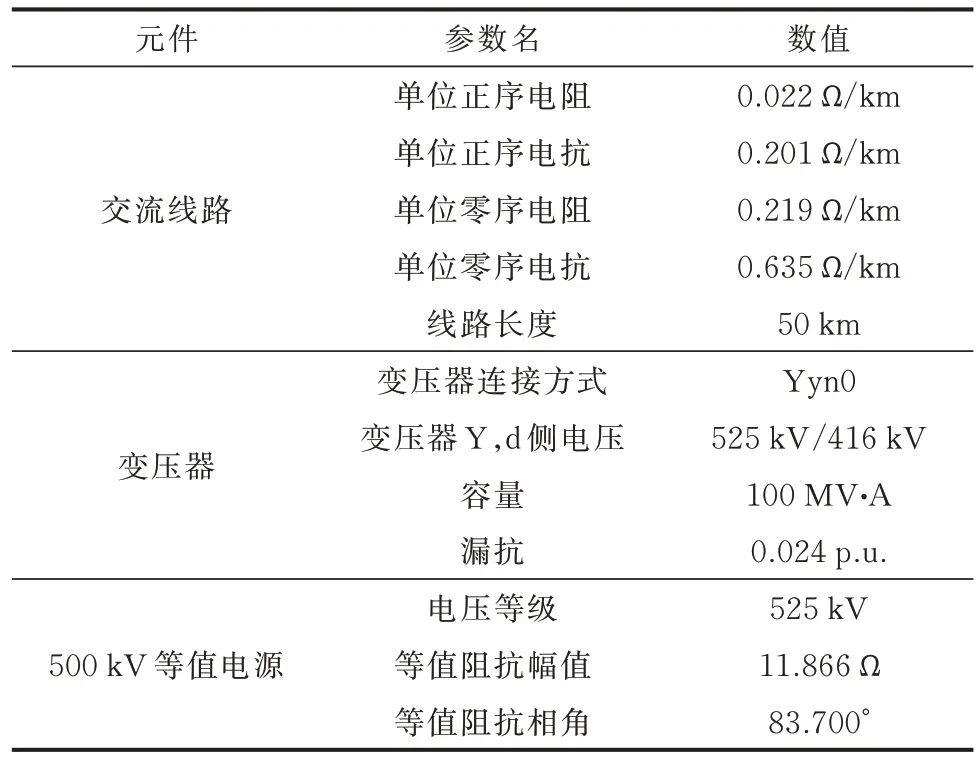
表1 仿真参数Table 1 Simulation parameters
4.2 快速方向元件动作特性分析
将基于本文所提方法开发的保护装置接入仿真系统P1位置,以模拟不同位置、不同故障角的相间故障。快速方向元件判别结果及动作时间如表2 所示。表中:BC、CA、ABC 等分别表示BC 相间短路、CA 相间短路、ABC 三相短路等。
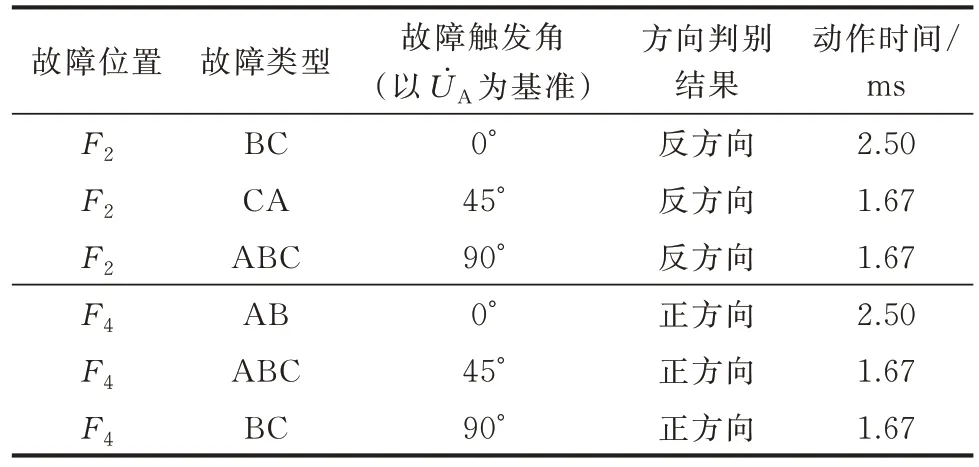
表2 快速方向元件动作结果Table 2 Operation results of fast direction element
由表2 可知,该方向元件基于电压、电流采样值的变化量,可迅速捕获故障发生后暂态自然响应阶段的电压跌落和电流拉升,装置采样率为1 200 Hz时1~2 个采样点即可正确判别故障方向。正、反方向判别采用互斥逻辑,不会出现同时判出的情况。
4.3 自适应距离保护动作特性分析
将传统基于正序电压极化的距离保护原理的保护装置和基于本文所提方法开发的装置共同接入仿真系统,并分别接入仿真系统P1、P2位置,以模拟不同位置各类故障,保护具体动作情况如表3 所示。表中:AN、AN-2 Ω、BC-1 Ω、ABN 等分别表示A 相金属性接地、A 相经2 Ω 过渡电阻接地、BC 相经1 Ω相间过渡电阻短路、AB 相间接地等。由表3 可知,传统基于正序电压极化的距离保护在接地故障时动作行为准确,在柔性直流侧出口处和电网侧母线发生相间故障时存在拒动和误动的情况,采用本文所提方法的保护装置能够正确动作。
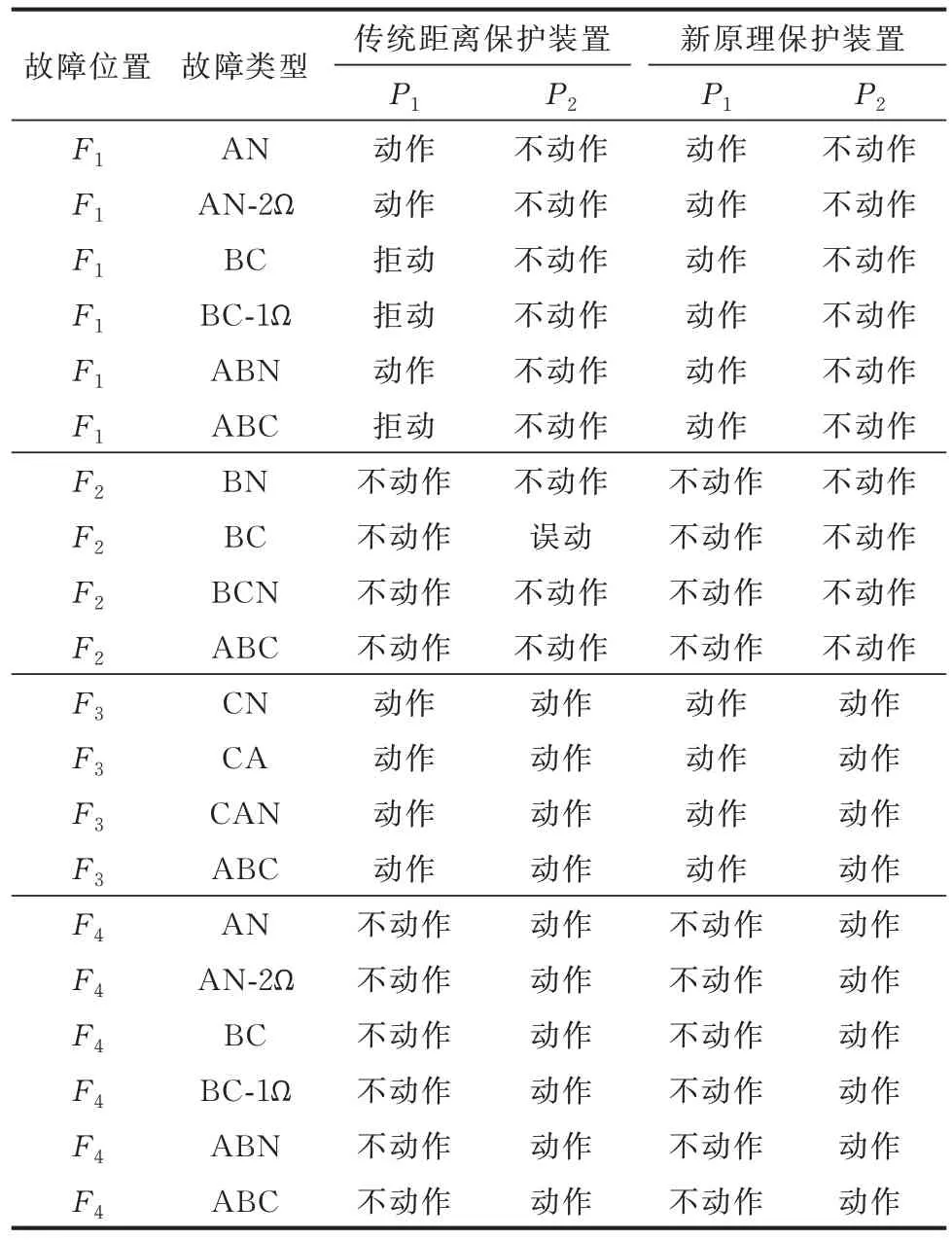
表3 距离保护动作结果对比Table 3 Comparison of operation results of distance protection
下文着重分析柔性直流侧出口处和电网侧母线发生相间故障时,本文所提保护方法的动作行为。由图5(a)可知,在柔性直流侧出口处发生区内BC相间故障初瞬阶段,对于柔性直流侧保护,BC 相间电流、电压变化量乘积ΔUBCΔIBC<0,满足快速方向元件正方向判据,阻抗继电器自适应扩展保护范围,使得比相结果落在动作区内(见图5(b)),保护可靠动作。

图5 区内相间故障仿真结果Fig.5 Simulation results of internal phase-tophase fault
同理,由附录A 图A6(a)可知,在电网侧母线发生BC 相间故障初瞬阶段,对于电网侧保护,ΔUBCΔIBC>0,满足快速方向元件反方向判据,阻抗继电器自适应缩小动作范围,使得比相结果落在动作区外(图A6(b)),保护可靠不动作。
5 结语
本文分析了基于正序电压极化的距离保护动作特性与柔性直流系统控制策略间的相互关系,得出了柔性直流系统控制策略对故障序分量幅值、相位的影响会导致基于正序电压极化的阻抗继电器在柔性直流近端或电网侧背后发生相间故障时拒动或误动的结论。基于利用故障初瞬自然响应阶段时域信息构建的快速方向判别元件,提出了结合暂态信息的自适应距离保护方法。理论分析和大量仿真验证充分证明,该方法不仅可以保证柔性直流送出系统交流线路发生故障时正确动作,而且对于新能源交流送出线路、常规输电线路同样适用。目前,项目团队已开发出基于该原理的线路保护装置,并将在国内柔性直流送出交流线路、新能源交流送出线路等多个场景实际运行。
本文所提方法的仿真结果与电力电子器件控制策略有直接关系,限于仿真条件仅能以现有系统典型低电压穿越策略进行,对于保护自适应调整角度α的取值仍需在各种新能源、柔性直流仿真模型以及实际系统中进一步验证。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
铁道通信信号(2020年8期)2020-02-06
电子测试(2018年22期)2018-12-19
进出口经理人(2017年7期)2017-09-20
电子制作(2016年23期)2016-05-17
电测与仪表(2016年15期)2016-04-12
自动化博览(2014年10期)2014-02-28
电力建设(2011年10期)2011-06-06