基于序列最优控制算法的隔震曲线梁桥非线性振动控制研究
2023-12-10 19:35:43李喜梅王建成杜永峰母渤海
地震工程学报 2023年2期
李喜梅 王建成 杜永峰 母渤海

摘要:
强震作用下隔震曲线梁桥会产生较大的弹塑性变形,需要采取一定的控制措施以保证其安全性。采用经典的Bouc-Wen模型,建立考虑上部结构偏心的隔震曲线梁桥的非线性动力方程,求解罕遇地震作用下结构的动力响应。针对隔震曲线梁桥罕遇地震作用下产生的较大弹塑性变形,建立隔震曲线梁桥的非线性振动控制方程,将该方程等效线性化后采用序列最优控制算法(SOC)和经典线性最优控制(COC)对桥梁进行振动控制研究。结果表明:在罕遇地震下,隔震曲线梁桥的下部结构与隔震层都已屈服进入塑性阶段,且有少量的残余位移产生;序列最优控制算法和经典线性最优控制都能有效地减小隔震曲线梁桥弹塑性状态下的平动位移与残余位移,并有效抑制曲线桥的扭轉效应,其中序列最优控制算法较经典最优控制更能显著削减隔震曲线梁桥的峰值响应。
关键词:
隔震曲线梁桥; Bouc-Wen模型; 序列最优控制算法
中图分类号: TU352.1; U441+.3 文献标志码:A 文章编号: 1000-0844(2023)02-0279-08
DOI:10.20000/j.1000-0844.20200924002
Nonlinear vibration control of isolated curved girder bridges
based on the sequential optimal control algorithm
LI Ximei1,2, WANG Jiancheng1,2, DU Yongfeng1,2, MU Bohai3
(1.Western Engineering Research Center of Disaster Mitigation in Civil Engineering of Ministry of Education,
Lanzhou University of Technology, Lanzhou 730050, Gansu, China;
2. Institute of Earthquake Protection and Disaster Mitigation, Lanzhou University of Technology, Lanzhou 730050, Gansu, China;
3. CSCEC AECOM Contestants Co., Ltd., Lanzhou 730050, Gansu, China)
Abstract:
Various control measures need to be taken to ensure the safety of isolated curved girder bridges as they produce large elastic-plastic deformation under strong earthquakes. The classical Bouc-Wen model was used, and the nonlinear dynamic equation for isolated curved beam bridges considering the upper structures eccentricity was established to solve the dynamic response of the structure under rare earthquakes. In view of the large elastic-plastic deformation of isolated curved girder bridges under rare earthquakes, the nonlinear vibration control equation was established. After equivalent linearization treatment for the equation, sequential optimal control (SOC) and classical linear optimal control (COC) were used to study the vibration control of the bridge. The results show that under rare earthquakes, the lower structure and isolation layer of the curved bridge enter the plastic stage, and a small amount of residual displacement is generated. Both the SOC and COC can effectively reduce the horizontal and residual displacements of the isolated curved girder bridge under elastic-plastic conditions and also effectively restrain its torsional effect. Compared with the COC, the SOC algorithm can greatly reduce the peak response of the curved bridge.
Keywords:
isolated curved girder bridge; Bouc-Wen model; sequential optimal control algorithm
0 引言
在公路及城市道路的立体交叉体系中,由于受周围环境、交通线路等因素的限制,需要采用曲线桥实现各方向的交通互联,保证交通线路顺畅,改善城市交通的紧张状况[1]。强震作用下桥梁一般会发生弹塑性变形,使得桥梁抗震成为突出问题,需要采取减隔震控制措施来保证桥梁安全。目前针对直线连续梁桥减震控制方法已做了大量研究[2-3]。曲线桥梁的减隔震控制在国内也已开始理论上[4-5]的探索,但由于曲线桥结构形式复杂,现有的研究还远不能满足实际工程的需要[6]。
在被动隔震系统中加入主动或半主动控制元件,构成所谓的智能隔震体系[7]。采用这种混合控制策略可以提高普通隔震结构的自适应性,因而成为近年来结构控制领域内的一个十分活跃的研究方向[8]。在对控制元件进行试验研究的同时,控制算法的研究也取得了很大的进展[9]。控制算法用来确定每个时刻控制力的大小,对控制效果的优劣起着举足轻重的作用[10]。因此,研究主动或半主动控制算法具有重要的意义。亓兴军等[11-12]、全伟等[13]和Amjadian等[14]建立了曲线梁桥的有限元模型,采用经典最优控制算法,用不同的减隔震方法对曲线梁桥的振动控制进行了深入的研究,但计算过程中需要求解非线性Riccati方程,且有限元建模分析较复杂,工作量大,计算效率低。为了简化分析,提高计算效率,王丽等[15]、李喜梅等[16]根据曲线梁桥的受力特点,建立了适合分析隔震曲线梁桥的简化模型,并验证了简化模型的正确性及精度。李喜梅等[17]根据杜永峰提出的序列最优控制算法,建立隔震曲线梁桥的双质点六自由度简化模型,对一座三跨隔震曲线梁桥进行了振动控制分析,但对于强震作用下处于弹塑性状态的曲线梁桥,采用序列最优控制算法是否能达到很好的控制效果未进行研究。
本文基于以上研究,在已有的双质点六自由度简化模型的基础上,采用经典的Bouc-Wen模型,建立考虑上部结构偏心的隔震曲线梁桥的弹塑性模型,通过MATLAB编程分析隔震曲线梁桥在罕遇地震作用下结构的动力响应,采用序列最优控制算法对罕遇地震作用下结构的动力响应进行振动控制分析,并与经典最优控制算法做对比。
1 模型的建立
1.1 模型假设
对于隔震桥梁来说,桥墩刚度远大于隔震支座的刚度,桥面结构的质量也大于桥墩的质量,为了简化计算,可将隔震桥梁简化为一个双质点双自由度的剪切模型。文献[18]提出了规则隔震桥梁的简化剪切模型,并在该模型的基础上进行了相关内容的探讨,但对于隔震曲线梁桥这种非规则桥梁,双自由度简化剪切模型已不能满足其精度条件,文献[17]给出了隔震曲线梁桥的双质点六自由度简化剪切模型,并对模型的正确性与精度进行了验证,但该模型仅适用于矮墩条件下的隔震曲线梁桥。本文采用文献[17]提出的隔震曲线梁桥的简化模型,分析隔震曲线梁桥的非线性动力响应,具体的简化剪切模型如下:
分别将隔震曲线梁桥桥墩及上部结构简化为两个各具两水平x、y自由度与一个围绕质量中心轴扭转θ自由度的堆积质量m1、m2模型系统,桥墩与上部结构为两质点非同轴质量偏心结构的分析模型,上、下质点分别表示曲线桥上、下结构[17]。简化模型如图1所示。
1.2 隔震曲线梁桥非线性动力方程的建立
取隔震曲线梁桥为剪切型,将隔震曲线梁桥的上部结构和下部结构分别记为层。以隔震曲线梁桥上部结构的质量中心为坐标原点,建立隔震曲线梁桥的非线性运动方程及振动控制方程,表示如下:
M+C+Fs(U,)=-MEg (1)
M+C+Fs(U,)=Lfc-MEg (2)
式中:M、C、L和E分别为曲线梁桥模型的质量矩阵、阻尼矩阵、水平控制力作用位置矩阵和地震作用影响矩阵;fc为水平方向的控制力;、和U分别为各质点相对于地面的加速度、速度和位移;g={xg,yg,θg}T为地震加速度向量;Fs(U,)为曲线梁桥的滞回恢复力,取桥梁下部结构和隔震层均为经典Bouc-Wen模型,写为:
Fs(U,)=KeU+Khυ (3)
=xy=xiyi=
Aixi-βixiυxiμi-1υxi-γixiυxiμi
Aiyi-βiyiυyiμi-1υyi-γiyiυyiμi(4)
式中:U={x,y,θ}T={xi,yi,θi}T,xi、yi和θi分别为第i层的x、y方向的平动位移和转角;υ为结构的滞回位移向量,υx、υy分別为结构x、y向的滞回位移向量;xi、yi为结构的层间相对速度,xi=i-i-1,yi=i-i-1;Ai、βi、γi、μi均为滞回曲线的参数;Ke、Kh分别为结构的弹性刚度矩阵和塑性刚度矩阵。
当结构为钢筋混凝土时,根据实测结果:αi=0.02~0.1,Ai=1,βi=-3γi,γi=-12(1-αi)Kifi2,fi为结构各层的受剪承载力[19];隔震层Bouc-Wen模型参数取[20]:μ=2,A=1,β=γ=0.5。金建敏等[ 21]对铅芯隔震叠层橡胶支座采用Bouc-Wen模型进行了深入的研究,认为对于铅芯隔震叠层橡胶支座采用Bouc-Wen模型进行隔震设计时,建议屈服后刚度与初始刚度之比α取1/15以下。因此,本文取α=0.05。
由此式(1)和式(2)可以写为:
M+C+KeU+Khυ=-MEg (5)
M+C+KeU+Khυ=Lfc-MEg (6)
式中:质量矩阵M=MxMyJ,J=J1J2,Mx=My=m1m2,Ji=mi(r2i+X2mi+Y2mi)
其中:m1、m2分别代表隔震曲线梁桥的下、上部结构质量;J1、J2分别为下、上部结构转动惯量[22];ri为结构的回转半径;Xmi、Ymi分别为桥梁下、上部结构质心相对于参考轴的坐标。
弹性刚度矩阵Ke=Kxx0Kxθ0KyyKyθKθxKθyKθθ
其中:Kxx、Kyy分别为结构在x、y向弹性平动刚度,故:
Kxx=α1Kx1+α2Kx2-α2Kx2-α2Kx2α2Kx2
Kxi=∑lr=1kxri,Kyi=∑lr=1kyri
式中:kxri、kyri表示第i层第r个桥墩位置处x、y向的有效刚度;l代表曲线梁桥桥墩(或支座)的数目;Kxi表示第i层x向的屈服前的水平总刚度;αi为第i层屈服后和屈服前的水平刚度之比,当αi=0时,表示结构的第i层处于完全非线性状态,当αi=1时,结构的第i层处于弹性状态;Kyy与Kxx在形式上完全相同,只是将矩阵中的Kxi换成Kyi。
Kxθ、Kyθ、Kθθ分别为隔震曲线梁桥在x、y向的弹性平扭刚度和扭转刚度,其中
Kxθ=Kxθ11Kxθ12Kxθ21Kxθ22,
Kθθ=Kθθ11Kθθ12Kθθ21Kθθ22
Kθx=KxθT,
Kθy=KyθT
式中:Kxθij表示第i层不动,仅j层发生x向单位位移时在第i层所需施加的力矩;同样,Kyθ与Kxθ在形式上完全一致,各元素Kyθij表示第i层不动,仅j层发生y向单位位移时在第i层所需施加的力矩;Kθθij表示第i层不动,仅j层发生单位转角时在第i层所需施加的力矩[23]。
塑性刚度矩阵Kh=Kxh00KyhKθxhKθyh
式中:Kxh\,Kyh分别为结构在x、y向塑性平动刚度,Kθxh\,Kθyh分别为x、y向塑性平扭刚度。其中:
Kxh=(1-α1)Kx1-(1-α2)Kx20(1-α2)Kx2
Kyh、Kθxh、Kθyh与Kxh在形式上是完全一致的,只不过是将矩阵中的Kxi分别换为Kyi、-Kxieyi、Kyiexi。这里,exi、eyi分别表示第i层质心与刚心沿y、x方向的距离,表示为:exi=xri-xmi,eyi=yri-ymi。xri、yri为第i层第r个桥墩沿x、y向坐标,xmi、ymi为第i层质心的x、y向坐标。
阻尼矩阵C用分区瑞利阻尼
C=C0+Cr, C0=αsM+βsKe
Cr=0000000Cb,xx000Cb,xθ000000000Cb,yy0Cb,yθ0000000Cb,θx0Cb,θy0Cb,θθ
式中:C0为经典瑞利阻尼矩阵;Cr为非比例阻尼的余项阻尼矩阵,Cr中的各元素的计算可参考文献[24]。αs、βs为下部结构瑞利阻尼的比例系数,即
αsβs=2ξsωi+ωjωiωj1
式中:ξs为下部结构的阻尼比;ωi、ωj为结构第i、j阶圆频率。
将式(6)转化为状态空间表达式如下:
=AxZ+Azυ+Bxfc+Exg (7a)
Y=CfZ+Afυ+Bffc+Wg (7b)
式中:Z=U,
Ax=0I-M-1Ke-M-1C,
Az=
0-M-1Kh,
Bx=0M-1L,
Ex=0-E。其中,I为单位矩阵,E=[Ix,Iy,Iθ],
Ix=[12×1,02×1,02×1]T,
Iy=[02×1,12×1,02×1]T,
Iθ=[02×1,02×1,12×1]T。选择输出各质点相对于地面的加速度以及各质点相对于地面的位移,则输出矩阵为
Cf=I0-M-1Ke-M-1C,
Af=0-M-1Kh
Bf=0M-1L,
W=0-E
1.3 等效线性化的状态方程
引用滞变位移项为零的假定,建立Bouc-Wen模型的等效线性化表达式[7]。该方法首先由Yang JN提出,并用于瞬时最优控制[25]。杜永峰[ 7]将该方法用于序列最优控制,对滞变智能隔震结构进行了振动控制研究。本文也采用零滞变位移这一等效线性化方法,对隔震曲线梁桥进行振动控制,则状态方程变为:
r=AxZr+Bxfc+Exg (8a)
Y=CfZr+Bffc+Wg (8b)
式中:Zr为略去滞变位移项的状态向量;其余各矩阵的表达式同式(7a)和(7b)。
2 序列最優控制算法
2.1 基于序列最优控制目标函数的最优控制力
本文对进入弹塑性的隔震曲线梁桥进行振动控制分析时,建立的控制力和状态向量的关系是借用线性最优控制的理论,故将目标函数改为等效线性化后的状态变量。
J=∫tft012Zr(t)TQZr(t)+12fc(t)TRfc(t)dt(9)
式中:Q、R分别为结构动力响应和控制力的权重矩阵;t0、tf分别为控制的开始时刻和结束时刻。
将地震波及控制力转化为一系列时间域脉冲,由于地震动及控制力均随时间推移逐步输入至结构系统,则系统当前时刻响应由当前与过去的时刻脉冲响应叠加而成,即[26]
Zr(t)=Zr∑(j-1)(t)+Zrj(t) (10)
式中:下标“∑(j-1)”代表直到第j-1个步长上(过去时刻)脉冲影响的总和。将式(10)代入式(9)构造Lagrange函数,原约束优化问题转化为无约束问题。因当前时刻脉冲只影响当前时刻及未来时刻响应,对过去时刻响应无影响,因此将纯粹含过去时刻脉冲影响控制目标函数分离,引用最优控制理论的泛函极值条件,可得结构最优控制的一般表达式为[26]:
fc(tA)=-R-1BxTλ(tA) (11a)
=-AxTλ-QZr,λ(tf)=0 (11b)
r=AxZr+Bxfc+Exg (11c)
2.2 基于状态反馈的序列最优控制算法实现
在式(11c)中,利用状态转移算法建立如下的递推公式:
Zr(tj)=eAxΔtZr(tj-1)+ΔtBxfc(tj-1)+
ΔtExg(tj-1),
tj=tA+jΔt, j=2,3,…,m(12)
式中:tA对应当前时刻;m对应终止时刻的时间步长数。
从式(11b)中直接求解λ,由终了时刻tf=tA+mΔt逆向递推λ(t),利用状态转移算法逆向计算距终了时刻一个步长的λ值,得
λ(tA+(m-1)Δt)=e-AλΔtλ(tA+mΔt)-Δte-AλΔtQZr(tA+mΔt)(13)
在式(13)中引用终值条件,即λ(tA+mΔt)=0,并将式(12)代入式(13),得
λ[tA+(m-1)Δt]=-Δte-AλΔtQλeAxmΔt[Zr(tA)+ΔtBxfc(tA)+ΔtExg(tA)](14)
在式(14)中反复引用逆向递推,最终可得:
λ(tA)=ΔtQA(m)[Zr(tA)+ΔtBxfc(tA)+
ΔtExg(tA)](15)
QA(m)=e-AλmΔtQλeAxmΔt+e-Aλ(m-1)ΔtQλeAx(m-1)Δt+…+e-AλΔtQeAxΔt (16)
式中:Aλ=-Ax,Qλ=-Q。
将式(16)代入式(11a),可得距控制终止时刻为m个步长的时间所对应的理想控制力:
fc(tA)=ΔtIrH(m)Zr(tA)+(Δt)2ErH(m)g(tA)(17)
式中:
IrH(m)=Iqr(m)-1Rqr(m)
ErH(m)=IrH(m)-1Ex
Iqr(m)=I-(Δt)2Rqr(m)Bx
Rqr(m)=R-1BxQA(m)
式中:IrH(m)、ErH(m)为最优控制力系数。只要得到每个时刻的最优控制力系数,就能求出每一时刻的最优控制力。
3 算例与讨论
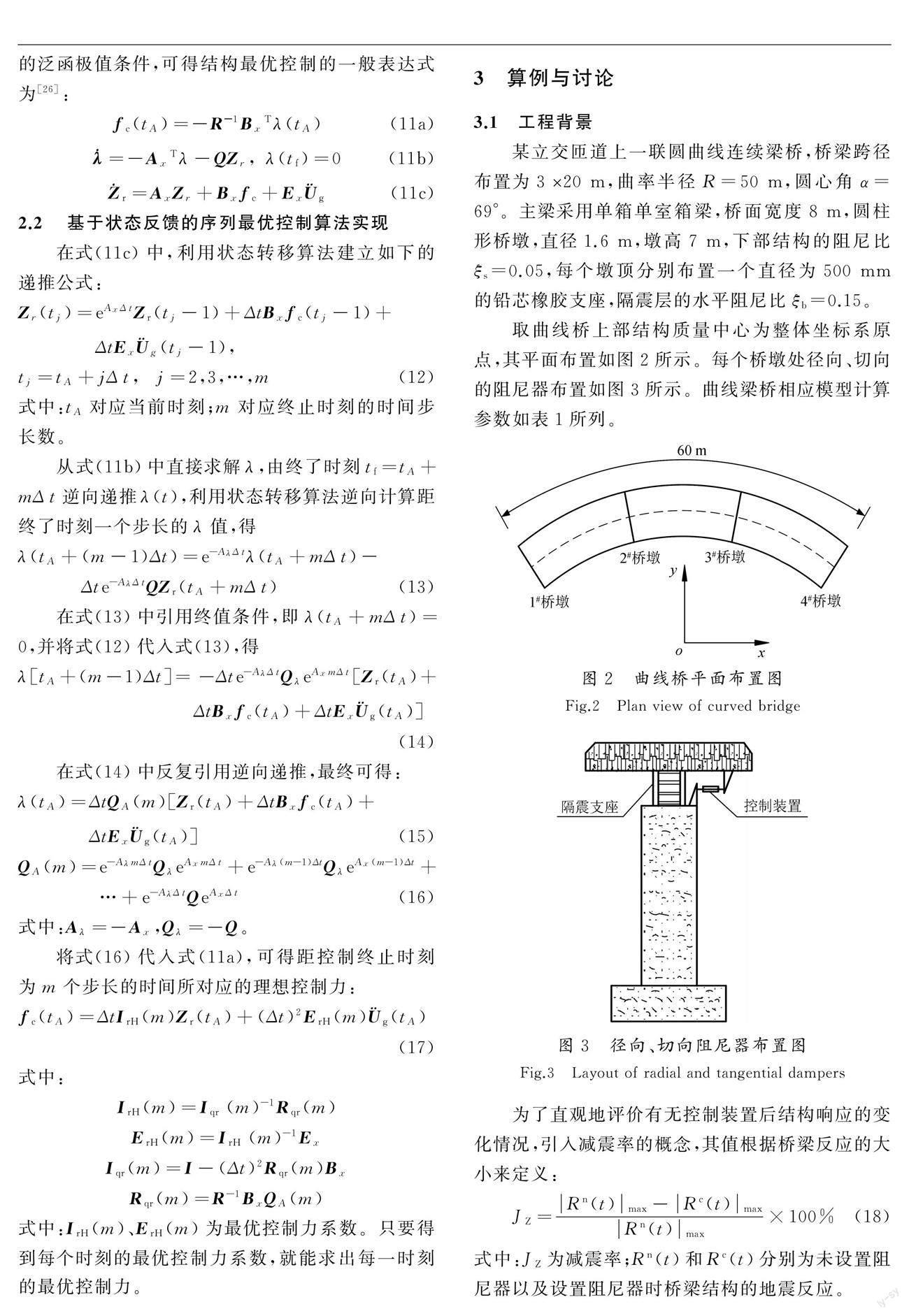
3.1 工程背景
某立交匝道上一联圆曲线连续梁桥,桥梁跨径布置为20 m,曲率半径R=50 m,圆心角α=69°。主梁采用单箱单室箱梁,桥面宽度8 m,圆柱形桥墩,直径1.6 m,墩高7 m,下部结构的阻尼比ξs=0.05,每个墩顶分别布置一个直径为500 mm的铅芯橡胶支座,隔震层的水平阻尼比ξb=0.15。
取曲线桥上部结构质量中心为整体坐标系原点,其平面布置如图2所示。每个桥墩处径向、切向的阻尼器布置如图3所示。曲线梁桥相应模型计算参数如表1所列。
为了直观地评价有无控制装置后结构响应的变化情况,引入减震率的概念,其值根据桥梁反应的大小来定义:
JZ=Rn(t)max-Rc(t)maxRn(t)max×100%(18)
式中:JZ为减震率;Rn(t)和Rc(t)分别为未设置阻尼器以及设置阻尼器时桥梁结构的地震反应。
3.2 振动控制分析
本文采用状态反馈序列最优算法和经典线性最优控制算法对罕遇地震下的隔震曲线桥进行振动控制,假设控制器能够实时提供结构所需要的控制力。控制效果以下部结构和上部结构的位移为评价指标。为了使不同控制算法具有可比性,定义控制能量指标为控制力的绝对值积分E=∫tft0fc(t)dt。在结构x、y向同时输入双向的El-Centro地震波,并将加速度峰值调整为400 cm/s2,分别求隔震曲线梁桥在无、有控状态下的x、y向及扭转角位移,结果见图4。
由图4可以看出,隔震曲线梁桥在无控状态下下部结构x、y向的最大位移分别为3.76 cm和3.69 cm,均超过其屈服位移3.5 cm进入了塑性阶段,并产生了3.8 mm的残余位移;上部结构x、y向的最大位移分别为12.45 cm和12.36 cm,均超过了隔震层的屈服位移7.8 mm进入塑性阶段,并产生了5.9 mm的残余位移。运用经典最优控制算法控制后下部结构x、y向的最大位移分别为1.84 cm和1.74 cm,与无控状态下相比,减震率分别达到51%和52%;上部结构x、y向的最大位移分别为5.11 cm和5 cm,与无控状态下相比,减震率分别达到59%和60%。运用序列最优控制算法控制后下部结构x、y向的最大位移分别为1.11 cm和1.19 cm,与无控状态下相比,减震率分别达到70%和68%;上部结构x、y向的最大位移分别为2.45 cm和2.4 cm,与无控状态下相比,减震率分别达到80%和81%。
由以上分析可以得出,在罕遇地震作用下,隔震曲线梁桥进入了塑性阶段,下部结构和隔震层都出现了残余位移。运用两种控制算法对隔震曲线梁桥进行振动控制后,发现序列最优控制算法(SOC)和经典线性最优控制(COC)对隔震曲线梁桥弹塑性状态下的x、y向以及扭转角位移都有很好的消减作用;但在同等能量控制下,序列最优算法对于下部结构的最大位移的控制效果比经典线性最优控制更好;对上部结构位移的消减,序列最优控制算法与经典线性最优控制相比也体现出较好的控制效果。
4 结论
本文采用经典的Bouc-Wen模型建立了隔震曲線梁桥的弹塑性模型,分析了隔震曲线梁桥在罕遇地震下的非线性动力响应,并通过序列最优控制算法和经典线性最优控制对曲线梁桥地震响应进行了控制分析,得出如下结论:
(1) 通过对罕遇地震作用下隔震曲线梁桥的非线性动力响应进行分析,发现在罕遇地震下隔震曲线梁桥下部和隔震层均已进入塑性阶段,并出现了残余位移。
(2) 采用序列最优控制算法和经典线性最优控制都能使上部结构的x、y向及扭转角位移响应均得到了明显的减小,尤其对上部结构扭转角位移的消减作用较为明显。又因曲线桥偏心引起的扭转响应得到相应控制,使得下部结构x、y向及扭转角位移响应得到有效控制,且对所产生的残余位移有一定的消减作用。
(3) 在同等控制能量下,序列最优控制算法对上、下部结构位移的控制效果较经典线性最优控制更显著,能更好地消减隔震曲线梁桥的峰值响应。
参考文献(References)
[1] 张智,李小军,兰日清.小半径曲线桥振动台试验模型设计与试验研究[J].振动与冲击,2019,38(4):95-102.
ZHANG Zhi,LI Xiaojun,LAN Riqing.Design and analysis of shaking table test of a small radius curved bridge[J].Journal of Vibration and Shock,2019,38(4):95-102.
[2] KAWASHIMA K.Seismic design and retrofit of bridge[C]// CD-ROM of 12th World Conference on Earthquake Engineering.Auckland,New Zealand:12 WCEE,2000.
[3] 蒋建军,李建中,范立础.桥梁板式橡胶支座与粘滞阻尼器组合使用的减震性能研究[J].公路交通科技,2005,22(8):44-48.
JIANG Jianjun,LI Jianzhong,FAN Lichu.Study on aseismic performance of combination of laminated rubber bearing and viscous damper for bridge[J].Journal of Highway and Transportation Research and Development,2005,22(8):44-48.
[4] 范立础,王志强.我国桥梁隔震技术的应用[J].振动工程学报,1999,12(2):26-34.
FAN Lichu,WANG Zhiqiang.Application of seismic isolation technology for bridges in China[J].Journal of Vibration Engineering,1999,12(2):26-34.
[5] RUIZ JULIAN F D,HAYASHIKAWA T,OBATA T,et al.Seismic performance of isolated curved steel viaducts equipped with deck unseating prevention cable restrainers[J].Journal of Constructional Steel Research,2007(63):237-253.
[6] 李正英,蒋林均,李正良.曲线连续梁桥不同减隔震方案对比分析[J].振動与冲击,2016,35(10):157-161,173.
LI Zhengying,JIANG Linjun,LI Zhengliang.Comparative analysis of seismic control schemes for continuous curved girder bridges[J].Journal of Vibration and Shock,2016,35(10):157-161,173.
[7] 杜永峰.滞变智能隔震结构的序列最优控制算法[J].计算力学学报,2007,24(1):57-63.
DU Yongfeng.Sequential optimal control algorithm for hysteretic smart isolated structures[J].Chinese Journal of Computational Mechanics,2007,24(1):57-63.
[8] 涂建维,瞿伟廉.升船机地震鞭梢效应基于神经网络预测的MR智能半主动控制[J].噪声与振动控制,2006,26(2):20-23.
TU Jianwei,QU Weilian.Semi-active control over roof MR intelligent isolation system in ship lift based on RBF network prediction[J].Noise and Vibration Control,2006,26(2):20-23.
[9] 李芦钰,欧进萍.基于AFSMC算法的结构非线性振动MR控制与仿真分析[J].地震工程与工程振动,2006,26(2):96-103.
LI Luyu,OU Jinping.Magnetorheological damper control and simulation analysis for vibration reduction of nonlinear structure based on AFSMC algorithm[J].Earthquake Engineering and Engineering Vibration,2006,26(2):96-103.
[10] 欧进萍.结构振动控制-主动、半主动和智能控制[M].北京:科学出版社,2003.
OU Jinping.Structural vibration control-active,semi-active and smart control[M].Beijing:Science Press,2003.
[11] 亓兴军,申永刚.三维地震动作用下曲线连续梁桥减震控制研究[J].振动与冲击,2012,31(6):119-125.
QI Xingjun,SHEN Yonggang.Seismic mitigation control for a curved continuous girder bridge with 3-D ground motion action[J].Journal of Vibration and Shock,2012,31(6):119-125.
[12] 亓兴军,吴玉华.曲线连续梁桥的磁流变阻尼器减震控制[J].公路交通科技,2011,28(9):81-88.
QI Xingjun,WU Yuhua.Seismic mitigation control for curved continuous girder bridge with magnetorheological dampers[J].Journal of Highway and Transportation Research and Development,2011,28(9):81-88.
[13] 全伟,李宏男.曲线桥多维多点地震激励半主动控制分析[J].工程力学,2009,26(3):79-85.
QUAN Wei,LI Hongnan.Semi-active control of curved bridge under multi-component and multi-support earthquake[J].Engineering Mechanics,2009,26(3):79-85.
[14] AMJADIAN M,AGRAWAL A K.Semi-active control of the torsional response of horizontally curved bridges[C]//Proceedings of US National Conference on Earthquake Engineering.Los Angeles:NCEE,2018.
[15] 王丽,周锡元,闫维明.曲线梁桥地震响应的简化分析方法[J].工程力学,2006,23(6):77-84.
WANG Li,ZHOU Xiyuan,YAN Weiming.Simplified analysis method for seismic response of curved bridges[J].Engineering Mechanics,2006,23(6):77-84.
[16] 李喜梅,杜永峰,母渤海.多维地震激励下曲线梁桥简化模型及最不利输入方向研究[J].地震工程学报,2020,42(2):304-310.
LI Ximei,DU Yongfeng,MU Bohai.A simplified model of,and critical angles for curved bridges under multi-dimensional earthquake excitation[J].China Earthquake Engineering Journal,2020,42(2):304-310.
[17] 李喜梅,杜永峰.水平雙向地震激励下基于序列最优控制算法曲线梁桥控制分析[J].振动与冲击,2015,34(10):6-11,33.
LI Ximei,DU Yongfeng.Curved girder bridges' control based on sequential optimal control algorithm under two-directional horizontal earthquake[J].Journal of Vibration and Shock,2015,34(10):6-11,33.
[18] 周锡元,李中锡.规则型隔震桥梁结构的简化分析方法[J].土木工程学报,2001,34(3):53-58,66.
ZHOU Xiyuan,LI Zhongxi.Simplified formulas for seismic-isolation regular bridge[J].China Civil Engineering Journal,2001,34(3):53-58,66.
[19] 李桂青.结构动力可靠性理论及其应用[M].北京:地震出版社,1993.
LI Guiqing.Structural dynamic reliability theory and its application[M].Beijing:Seismological Press,1993.
[20] 党育,韩建平,杜永峰.结构动力分析的MATLAB实现[M].北京:科学出版社,2014.
DANG Yu,HAN Jianping,DU Yongfeng.Dynamic analysis of structures with MATLAB[M].Beijing:Science Press,2014.
[21] 金建敏,周福霖,谭平.铅芯橡胶支座微分型恢复力模型屈服前刚度的研究[J].工程力学,2010,27(10):7-13.
JIN Jianmin,ZHOU Fulin,TAN Ping.Study on pre-yield shear stiffness of differential restoring force model for lead rubber bearing[J].Engineering Mechanics,2010,27(10):7-13.
[22] 李宏男,霍林生.结构多维减震控制[M].北京:科学技术出版社,2008.
LI Hongnan,HUO Linsheng.Multi-dimensional seismic control of structure[M].Beijing:Science Press,2008.
[23] 党育.复杂隔震结构的分析与软件实现[D].武汉:武汉理工大学,2011.
DANG Yu.Analysis and software development of complex isolated buildings[D].Wuhan:Wuhan University of Technology,2011.
[24] 沈金生.非比例阻尼隔震结构反应谱方法研究及平扭耦联动力分析[D].兰州:兰州理工大学,2007.
SHEN Jinsheng.Study of response spectrum method for non-proportionally damped islated structures and dynamic analysis of lateral-torsional coupled vibration[D].Lanzhou: Lanzhou University of Technology,2007.
[25] YANG J N,LI Z,LIU S C.Stable controllers for instantaneous optimal control[J].Journal of Engineering Mechanics,ASCE,1992,118(8):1612-1630.
[26] 杜永峰,刘彦辉,李慧.雙向偏心结构扭转耦联地震反应的序列最优控制[J].地震工程与工程振动,2007,27(4):133-138.
DU Yongfeng,LIU Yanhui,LI Hui.Sequential optimal control of torsional coupled seismic response for bidirectionally eccentric structure[J].Journal of Earthquake Engineering and Engineering Vibration,2007,27(4):133-138.
猜你喜欢
科学大众(2023年17期)2023-10-26 07:39:14
数学年刊A辑(中文版)(2021年1期)2021-06-09 09:32:02
天天爱科学(2020年6期)2020-09-10 07:22:44
数学物理学报(2019年3期)2019-07-23 01:15:38
数学物理学报(2018年3期)2018-07-17 06:15:30
数学物理学报(2017年6期)2018-01-22 02:26:40
通信电源技术(2016年4期)2016-04-04 02:57:30
西安建筑科技大学学报(自然科学版)(2014年1期)2014-11-12 13:03:30
计算物理(2014年2期)2014-03-11 17:01:44
城市道桥与防洪(2014年6期)2014-02-27 07:27:21